Общие характеристики:
- Диапазоны измерения
- от 0..6,0 кПа до 0..240 МПа
- Основная погрешность
- ±0,1%; ±0,25%; ±0,5%; ±1,0%
- Выходные сигналы
- 4..20 мА; 20..4 мА; 0..5 мА; 5..0мА; 0..20 мА; 20..0 мА; 0,4..2 В; 0,5..4,5 В; 0..5 В; 0..10 В
- Материал мембраны
- AISI 316L
- Материал корпуса и штуцера
- Нержавеющая сталь
- Материал уплотнения
- NBR; EPDM; FKM
- Электрическое подключение
- угловой разъем DIN43650 С; DIN43650A; РС4-ТВ; кабельный вывод IP65 (IP68) и др.
- Механическое подсоединение к процессу
- М20х1,5; G1/2″ и др.
- Межповерочный интервал
- — датчики с допускаемой основной погрешностью ±0,5% и ±1,0%
- 5 лет
- — датчики с допускаемой основной погрешностью ±0,25% и ±0,1%
- 2 года
Форма заказа:

Пример кода заказа:
КОРУНД-ДИ-001М-120-УХЛ3.1-IP65-0,5-1,6МПа-42-1070-М1-КС-ГП:
— Датчик избыточного давления
— Модель 120
— Климатическое исполнение УХЛ3.1
— Защита от пыли и воды IP65
— Основная погрешность 0,5%
— Диапазон измерения 0..1,6 МПа
— Выходной сигнал 4..20 мА
— Диапазон компенсации температурной погрешности -10..+70 С
— Присоединение к источнику давления – штуцер М20х1,5
— Электрическое присоединение через коннектор DIN 43650 тип С
— Гос. поверка
Модели, входящие в серию:

Коды механических присоединений к источнику давления (типы и габариты):

Коды электрических присоединений (типы и габариты):

Коды монтажных частей и аксессуаров:

Габаритные размеры:




| Артикул: | |
| Производитель: | СТЭНЛИ |
Датчики КОРУНД-Дх-001М предназначены для работы в системах автоматического контроля, регулирования и управления технологическими процессами и обеспечивают непрерывное преобразование измеряемого параметра — избыточного давления (КОРУНД-ДИ-001), абсолютного давления (КОРУНД-ДА-001), разрежения (КОРУНД-ДР-001) и давления–разрежения (КОРУНД-ДИВ) сред, неагрессивных к материалам контактирующих изделий (нержавеющий сплав AISI316L), в унифицированный электрический выходной сигнал постоянного тока.
Датчики КОРУНД-Дх-001М выполнены с использованием цифровой коррекции влияния внешних воздействий и отличаются повышенными метрологическими характеристиками в рабочем диапазоне температур.
ВНИМАНИЕ! Наличие и актуальную стоимость товара просим уточнять у менеджеров.
Версия для печати
- Характеристики
- Документация
Датчики предназначены для работы с вторичными контрольно-измерительными, показывающими, регистрирующими, и регулирующими приборами, а также контроллерами и другими устройствами автоматики, работающими с входными сигналами 0 — 5 мА; 4 — 20 мА; 0 — 20 мА; 0 — 5 В; 0 — 10 В; 0,4 — 2 В; 0,5-5,5 В постоянного тока.
Температура контролируемой среды на мембране датчика может находиться в пределах от -50°С до +125°С.
По степени защищенности от воздействий пыли и воды датчики имеют исполнения IP65, IP67 или IP68 по ГОСТ 14254-80. Датчики КОРУНД-ДХ-001М обладают повышенной коррозионной стойкостью – корпус и штуцер выполнен из нержавеющей стали AISI316L.
Датчики с выходным сигналом 4-20 мА могут выполняться с видом взрывозащиты «Искробезопасная электрическая цепь» с уровнем взрывозащиты «особо взрывобезопасный» по ГОСТ Р 51330.0-99, ГОСТ Р 51330.10-99 и могут быть использованы для взрывобезопасных условий. Взрывозащищенные датчики предназначены для установки и работы во взрывоопасных зонах помещений и наружных установок согласно главе 7.3 ПУЭ, и другим нормативным документам, регламентирующим применение электрооборудования во взрывоопасных условиях. Датчики взрывозащищенного исполнения соответствуют требованиям технического регламента ТР ТС 012/2011.
Датчик с выходным сигналом 4-20 мА может быть укомплектован индикатором ИДД, который включается в разрыв линии связи.
Верхние пределы измерений датчиков соответствуют ГОСТ 22520-85.
Датчики могут градуироваться в следующих единицах измерения:
- Па, кПа, МПа – по умолчанию;
- атм, кгс/см2 (ат), bar, мм.рт.ст. (Torr), м.вод.ст., psi, psf – по заказу.
Наименование датчиков различных моделей, пределы измерений, допускаемые давления и погрешности указаны в таблице 2. По предварительно согласованному заказу, нижний и верхний пределы измерений могут быть смещены.
Пределы допускаемой основной погрешности датчиков, выраженные в процентах от диапазона изменения выходного сигнала, равны ±0,1; ±0,15; ±0,25; ±0,5; ±1,0 % в зависимости от модели и заказа.
Датчики с выходным сигналом 4-20 мА могут имеют вид взрывозащиты «Искробезопасная электрическая цепь» с уровнем взрывозащиты «особо взрывобезопасный» или «взрывобезопасный» (маркировка по взрывозащите 1ЕхibIICT5 X или 0ExiaIICT5 X).
Датчики в зависимости от выходного сигнала и исполнения подключаются по двух-, трех- или четырехпроводной линии связи:
- четырехпроводная линия связи – для датчиков с выходным сигналом 0-5 мА, 0-20 мА;
- трехпроводная — для датчиков с выходным сигналом 0-5В; 0,5-5,5В; 0-10В; 0,4-2В; 0-5мА; 0-20 мА;
- двухпроводная линия связи для датчиков с выходным сигналом 4-20 мА.
Дополнительная погрешность от изменения напряжения питания не превышает 0.1% во всем диапазоне напряжения питания.
Пределы допускаемой дополнительной температурной погрешности датчиков γt, %/10° C
Таблица 1
|
Диапазон температурной компенсации |
Основная погрешность γ, % |
||||
|---|---|---|---|---|---|
|
0.1 |
0.15 |
0.25 |
0.5 |
1.0 |
|
|
0… +50 |
±0.06 |
±0.06 |
± 0.08 |
± 0.12 |
± 0.2 |
|
-10… +70 |
± 0.08 |
± 0.08 |
± 0.12 |
± 0.15 |
± 0.2 |
|
-40… +80 |
± 0.1 |
± 0.1 |
± 0.17 |
± 0.21 |
± 0.25 |
Расположение контактов на элементах электрического соединения
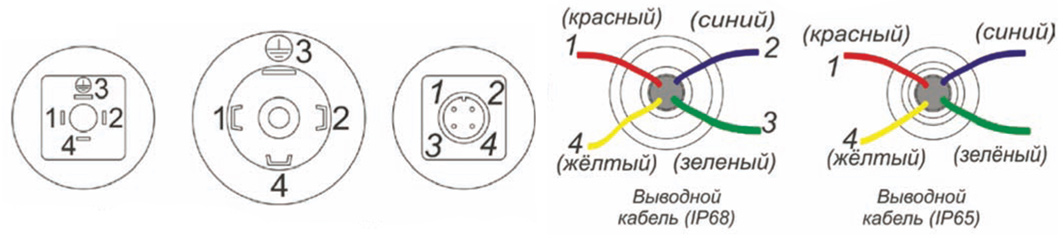
Схема условного обозначения датчиков при заказе
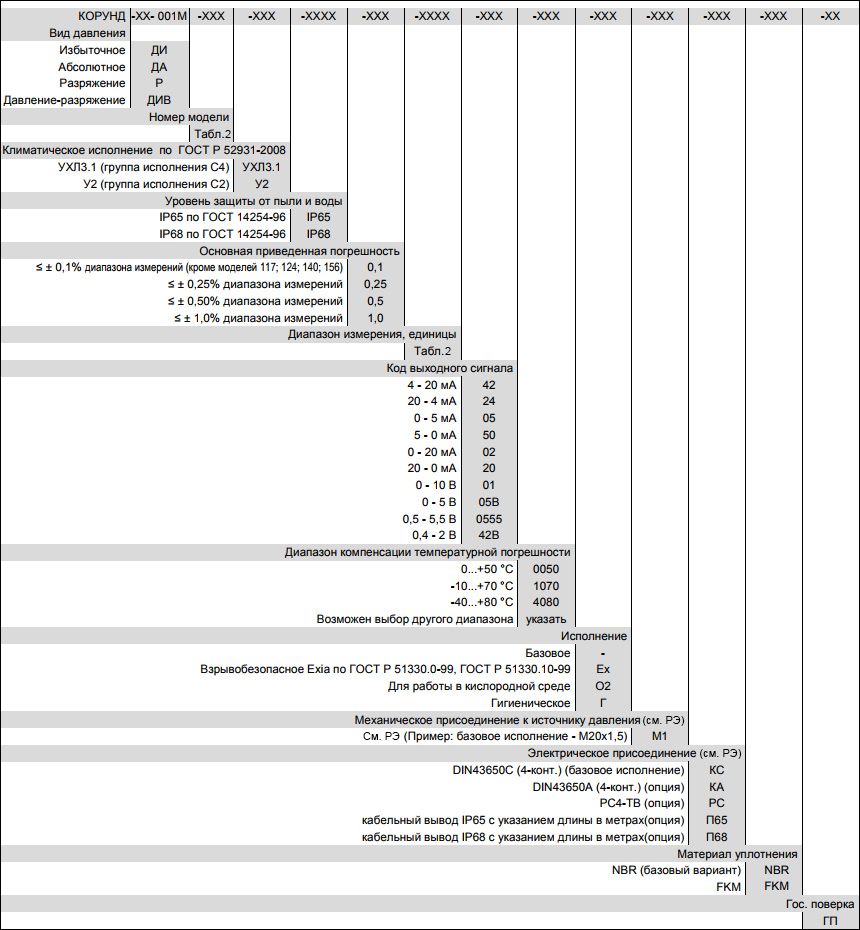
Пример кода заказа: КОРУНД-ДИ-001М-120-УХЛ3.1-IP65-0,5-1,6МПа-42-1070-М1-КС-ГП
Датчик избыточного давления
Модель 120
Климатическое исполнение УХЛ3.1
Защита от пыли и воды IP68
Основная погрешность 0,5%
Диапазон измерения 0…1,6 МПа
Выходной сигнал 4 – 20 мА
Диапазон компенсации температурной погрешности -10…+70°С
Присоединение к источнику давления – штуцер М20х1,5
Электрическое присоединение через коннектор DIN 43650 тип С
Гос. поверка
Таблица 2.
|
Вид измеряемого давления |
Модель |
Нижний диапазон измерения (Рн) |
Верхний диапазон измерения (Рв) |
Максимальная нагрузка |
Основная приведенная погрешность, ±% |
|---|---|---|---|---|---|
|
Избыточное давление (ДИ) |
117 |
0 |
6 кПа |
4 ⋅ Рв |
0,25; 0,5; 1.0 |
|
118 |
0 |
10; 16 кПа |
3 ⋅ Рв |
0,1; 0,25; 0.5, 1.0 |
|
|
119 |
0 |
25; 40; 60;100;160,250кПа |
2 ⋅ Рв |
0,1; 0,25; 0.5, 1.0 |
|
|
120 |
0 |
0,4; 0,6; 1; 1,6 МПа |
2 ⋅ Рв |
0,1; 0,25; 0.5, 1.0 |
|
|
121 |
0 |
2,5; 4; 6 МПа |
2 ⋅ Рв |
0,1; 0,25; 0.5, 1.0 |
|
|
122 |
0 |
10; 16 МПа |
2 ⋅ Рв |
0,1; 0,25; 0.5, 1.0 |
|
|
123 |
0 |
25;40;60 МПа |
2 ⋅ Рв |
0,1; 0,25; 0.5, 1.0 |
|
|
124 |
0 |
100; 160; 240; 600 МПа |
2 ⋅ Рв |
0,25; 0.5, 1.0 |
|
|
Абсолютное давление (ДА) |
140 |
0 |
10; 25 кПа |
4 ⋅ Рв |
0.25; 0.5; 1.0 |
|
141 |
0 |
40; 60 кПа |
3 ⋅ Рв |
0.25; 0.5; 1.0 |
|
|
144 |
0 |
100; 160; 250 кПа |
2 ⋅ Рв |
0,1; 0.25; 0.5; 1.0 |
|
|
145 |
0 |
0,4; 0,6; 1; 1,6; 2,5 МПа |
2 ⋅ Рв |
0,1; 0.25; 0.5; 1.0 |
|
|
146 |
0 |
2,5; 4; 6; 10; 16 МПа |
2⋅ Рв |
0,1; 0.25; 0.5; 1.0 |
|
|
Разряжение (ДР) |
156 |
0 |
-6,0; -10 кПа |
2⋅ Рв |
0,25; 0,5; 1,0 |
|
157 |
0 |
-16; -25; -40 кПа |
2⋅ Рв |
0,1; 0,25; 0,5; 1,0 |
|
|
158 |
0 |
-60; -100 кПа |
-100 кПа |
0,1; 0,25; 0,5; 1,0 |
|
|
Давление- разряжение (ДИВ) |
134 |
-6; -25; -40; -60; -100 кПа |
6; 25; 40; 60; 100 кПа |
2 ⋅ Pн / 2⋅ Рв |
0,15; 0,25; 0,5; 1.0 |
|
135 |
-100 кПа |
0,25; 0,4; 0,6; 1; 1,6; 2,4 МПа |
Pн=100кПа / 2 ⋅ Рв |
0,1; 0,25; 0,5; 1.0 |
СОГЛАСОВАНО
УТВЕРЖДАЮ
Генеральный директор

зам. директора ФГУП «ВНИИМС» производственной метрологии

.В. Иванникова
P’fi’ 2016 г.
ДАТЧИКИ ДАВЛЕНИЯ МАЛОГАБАРИТНЫЕ КОРУНД
МЕТОДИКА ПОВЕРКИ
КТЖЛ. 406234.003 МП
2016 г.
Содержание
Стр.
Общие сведения
-
1. Операции поверки
-
2. Средства поверки
-
3. Требования безопасности
-
4. Условия поверки и подготовка к ней
-
5. Проведение поверки
-
6. Оформление результатов
Приложение. Схема включения датчиков при поверке
Общие сведения
Настоящая рекомендация распространяется на первичную и периодическую поверки датчиков давления малогабаритных КОРУНД, предназначенных для непрерывного измерения и преобразования величины измеряемого параметра — абсолютного и избыточного давления, в том числе разрежения, давления-разрежения, гидростатического давления и разности давлений жидких и газообразных сред, в унифицированный электрический выходной сигнал, цифровой сигнал на базе HART-прото кола, цифровой сигнал по стандарту RS 485 Modbus RTU.
Настоящая рекомендация разработана ООО «СТЭНЛИ» и Всероссийским научно-исследовательским институтом метрологической службы (ВНИИМС) Госстандарта России.
Утверждена ВНИИМС 7/.^?. 2016г.
Настоящая рекомендация распространяется на датчики давления малогабаритные КОРУНД, выпускаемые в соответствии с ГОСТ 22520-85 и по технической документации ООО “СТЭНЛИ”.
Интервал между поверками — 2 года;
Для датчиков с допускаемой приведенной основной погрешностью ±0,5% или ±1,0% — 5 лет.
1. Операции поверки
-
1.1. При проведении поверки выполняют следующие операции:
-
— внешний осмотр — п. 5.1;
-
— опробование — п. 5.2;
-
— определение основной погрешности датчика — п. 5.3;
-
— определение вариации выходного сигнала датчика — п. 5.4.
2. Средства поверки
-
2.1. При проведении поверки применяют средства, указанные в таблице 1.
Таблица 1
|
№ |
Средство поверки |
Основные метрологические и технические хаоактеоистики соедств повеоки |
|
1 |
Манометр абсолютного давления МПА-15 |
Пределы допускаемой основной абсолютной погрешности: +/- 6,65 Па в диапазоне 0-20 кПа; +/-13,3 Па в диапазоне 20 — 133 кПа; пределы допускаемой основной погрешности +/- 0,01% от действительного значения измеряемого давления в диапазоне 133 — 400 кПа |
|
2 |
Микроманометр МКМ-4 |
Класс точности 0,01. Диапазон измерений 0,1 — 4,0 кПа |
|
3 |
Микроманометр МКВ-250 |
Пределы измерений 0 — 2,5 кПа; класс точности 0,01 и 0,02 |
|
4 |
Портативный калибратор давления(избыточного, вакуумметрического и разности давлений) ПКД-10 |
Пределы измерений 0,01 — 100 кПа. Пределы допускаемой основной погрешности +/- 0,05 % от измеряемого давления |
|
5 |
Задатчик давления «Воздух- 1600″ |
Пределы воспроизведения избыточного давления от 20 Па до 16 кПа. Пределы допускаемой основной погрешности в диапазоне от 20 до 500 Па +/-0,1 Па; свыше 500 Па и до 16 кПа — +/-0,02 % от задаваемого давления. В комплекте с блоком опорного давления (200, 300 Па и более) пределы воспроизведения разности давлений от 5 Па до 5 кПа; пределы допускаемой основной погрешности в диапазоне до 500 Па-+/- 0,14 Па |
|
6 |
Задатчик давления «Воздух- 1,6″ |
Пределы воспроизведения избыточного давления от 1 до 160 кПа. Пределы допускаемой основной погрешности — +/- 0,02 %, +/- 0,05 % от задаваемого давления |
|
7 |
Задатчик давления «Воздух-2,5» |
Пределы воспроизведения избыточного давления от 2,5 до 250 кПа. Пределы допускаемой основной погрешности; +/- 0,02 %, +/- 0,05 % от задаваемого давления |
|
8 |
Задатчик давления «Воздух- 6,3″ |
Пределы воспроизведения избыточного давления от 10 до 630 кПа. Пределы допускаемой основной погрешности: +/- 0,02%, +/- 0,05% |
|
9 |
Задатчик вакуумметрического давления «Воздух-0,4В» |
Пределы воспроизведения разрежения от — 0,8 до — 40 кПа. Пределы допускаемой основной абсолютной погрешности +/- 0,08 Па в диапазоне измерений 0,8 -4,0 кПа. Пределы допускаемой основной погрешности в диапазоне измерений 4-40 кПа: +/- 0,02%, +/- 0,05% от задаваемого давления |
|
10 |
Манометр грузопоршневой МП-2,5 I и II разрядов; ГОСТ 8291-83 |
Пределы допускаемой основной погрешности: +/-0,02%, +/- 0,05% от измеряемого давления в диапазоне измерений от 25 кПа до 0,25 МПа |
|
11 |
Манометр грузопоршневой МП-6 I и II разрядов; ГОСТ 8291-83 |
Пределы допускаемой основной погрешности: +/-0,02%, +/- 0,05% от измеряемого давления в диапазоне измерений от 0,04 до 0,6 МПа |
|
12 |
Манометр грузопоршневой МП-60 I и II разрядов; ГОСТ 8291-83 |
Пределы допускаемой основной погрешности: +/- 0,02%, +/- 0,05% от измеряемого давления в диапазоне измерений от 0,1 до 6 МПа |
|
13 |
Манометр грузопоршневой МП-600 I и II разрядов; ГОСТ 8291-83 |
Пределы допускаемой основной погрешности: +/- 0,02%, +/- 0,05% от измеряемого давления в диапазоне измерений от 1 до 60 МПа |
|
14 |
Манометр грузопоршневой МП-2500 II разряда; ГОСТ 8291-83 |
Пределы допускаемой основной погрешности +/- 0,05% от измеряемого давления в диапазоне измерений от 25 до 250 МПа |
|
15 |
Манометр грузопоршневой МВП-2,5;ГОСТ 8291-83 |
Пределы измерений избыточного давления 0 — 0,25 МПа; вакуумметрического давления (разрежения) 0 -0,1 МПа. Пределы допускаемой основной погрешности: +/- 5 Па при давлении (избыточном или вакуумметрическом) в пределах 0-0,01 МПа и +/-0,05% от измеряемого значения при давлении свыше 0,01 МПа |
|
16 |
Задатчик вакуумметрического давления «Метран-503» |
Пределы воспроизведения разрежения от минус 0,6 до минус 60 кПа. Пределы допускаемой основной абсолютной погрешности +/- 0,6 Па в диапазоне измерений 0,6 — 4 кПа. Пределы допускаемой основной погрешности в диапазоне измерений 4-60 кПа +/-0,02% от задаваемого давления |
|
17 |
Барометр М67 |
Пред, измер. 610 — 900 мм рт. ст. ПГ-;+/- 0,8 мм рт. ст. |
|
18 |
Вакуумметр теплоэлектрический ВТБ-1 |
Пределы измерений 0,002 — 750 мм рт. ст. |
|
19 |
Манометр для точных измерений МТИ |
Пределы измерений от 0,25 до 160 МПа. Класс точности 0,6 |
|
20 |
Вакуумметр для точных измерений ВТИ |
Пределы измерений 0-0,1 МПа. Класс точности 1 |
|
21 |
Датчик давления — эталон Корунд-001М |
Верхний предел измерения 100 кПа, или 1 МПа, или 10 МПА, или 100 МПа. Предел основной допускаемой погрешности 0,1 или 0,15%. |
|
22 |
Термометр ртутный стеклянный лабораторный |
Пределы измерений 0 — 55 °C. Цена деления шкалы 0,1 °C. Пределы допускаемой погрешности +/- 0,2 °C |
|
23 |
Образцовая катушка сопротивления Р331 |
Класс точности 0,01. Сопротивление 100 Ом |
|
24 |
Мера электрического сопротивления однозначная МС 3006 |
Класс точности 0,001. Сопротивление от 1 Ом до 100 кОм |
|
25 |
Магазин сопротивлений Р 33, ГОСТ 23737-79 |
Класс точности 0,2. Сопротивление до 99999,9 Ом |
|
26 |
Магазин сопротивлений Р4831 |
Класс точности 0,02 . Сопротивление до 111111,1 Ом |
|
27 |
Вольтметр универсальный В7- 54/3. ГОСТ Р 51350-99 |
Верхний предел измерений напряжения постоянного тока 200 В. Предел допускаемой основной погрешности измерения напряжения постоянного тока +/-0,0015% от U + 2 единицы младшего разряда, где U -значение измеряемого напряжения. Цена единицы младшего разряда 100 мкВ при измерении напряжения постоянного тока в пределах 2 В |
|
28 |
Вольтметр универсальный цифровой GW Instek GDM78251A |
Верхний предел измерения напряжения постоянного тока 1000 В. Предел допускаемой основной погрешности 0.012 % + 5 ед. мл. разряда. Цена единицы младшего разряда 100 мкВ при измерении напряжения постоянного тока в пределах 2 В |
|
29 |
Компаратор напряжения постоянного тока Р 3003 Ml |
Класс точности 0,001. Верхний предел измерений 2,121111 В |
|
30 |
Источник постоянного тока Б5-8 или Б5-45 |
Наибольшее значение напряжения на выходе 50 В. Допускаемое отклонение +/- 0,5 % от установленного значения напряжения |
|
31 |
Модем HART/USB |
Преобразователь сигналов HART в сигналы интерфейса USB для связи датчика с персональным компьютером через его стандартный последовательный порт |
|
32 |
Портативный HART-коммуникатор НС-275 фирмы Rosemount или аналогичный |
Устройство для связи с датчиком по цифровому каналу и для обмена данными по HART-протоколу |
|
33 |
Модем на базе стандартного интерфейса RS 485 для связи датчика с комьютером |
Устройство для связи с датчиком по цифровому протоколу на базе RS 485 |
|
34 |
Персональный компьютер |
IBM PC с операционной системой Windows ХР или выше |
-
2.2. Допускается применять другие средства поверки, технические и метрологические характеристики которых не уступают данным, указанным в таблице 1.
3. Требования безопасности
-
3.1. При проведении поверки соблюдают общие требования безопасности при работе с датчиками давления (см., например, ГОСТ 22520-85), а также требования по безопасности эксплуатации применяемых средств поверки, указанные в технической документации на эти средства.
4. Условия поверки и подготовка к ней
-
4.1. При проведении поверки соблюдают следующие условия:
-
1) Температура окружающего воздуха 23 +/- 2 °C.
-
2) Относительная влажность окружающего воздуха 30 — 80%.
-
3) Давление в помещении, где проводят поверку (далее — атмосферное давление), в пределах 84 — 106,7 кПа или 630 — 800 мм рт. ст.
-
4) Напряжение питания постоянного тока в пределах 12 — 36 В. Номинальное значение напряжения питания и требования к источнику питания — в соответствие с технической документацией на датчик.
Отклонение напряжения питания от номинального значения не более ±2%, если иное не указано в технической документации на датчик.
-
5) Сопротивление нагрузки при поверке датчиков:
-
— с аналоговым выходным сигналом 4 — 20 и 0 — 20 мА — 100 Ом;
-
— с аналоговым выходным сигналом 0 — 5 мА — 200 Ом;
-
— с цифровым выходным сигналом — в соответствии с технической документацией на датчик.
-
6) Рабочая среда — воздух или нейтральный газ при поверке датчиков с верхними пределами измерений, не превышающими 2,5 МПа, и жидкость при поверке датчиков с верхними пределами измерений более 2,5 МПа. Допускается использовать жидкость при поверке датчиков с верхними пределами измерений от 0,4 до 2,5 МПа при условии тщательного заполнения жидкостью всей системы поверки. Допускается использовать воздух или нейтральный газ при поверке датчиков с верхними пределами измерений более 2,5 МПа при условии соблюдения соответствующих правил безопасности.
-
7) Колебания давления окружающего воздуха, вибрация, тряска, удары, наклоны, магнитные поля (кроме земного) и другие воздействия, влияющие на работу и метрологические характеристики датчика, должны отсутствовать.
-
Импульсную линию, через которую подают измеряемое давление, допускается соединять с дополнительными сосудами, емкость каждого из которых не более 50 литров.
 Импульсную линию, через которую подают измеряемое давление, допускается соединять с дополнительными сосудами, емкость каждого из которых не более 50 литров.
Импульсную линию, через которую подают измеряемое давление, допускается соединять с дополнительными сосудами, емкость каждого из которых не более 50 литров.-
4.2. При поверке датчиков разности давлений с приемными камерами для подвода большего давления («плюсовая» камера) и меньшего давления («минусовая» камера), значение измеряемой величины (разности давлений) устанавливают, подавая соответствующее значение избыточного давления в «плюсовую» камеру датчика. При этом «минусовая» камера сообщается с атмосферой.
При поверке датчиков разности давлений с малыми пределами измерений для уменьшения влияния на результаты поверки не устраненных колебаний давления окружающего воздуха «минусовая» камера датчика может соединяться с измерительной камерой эталона, сообщающейся с атмосферой, если это предусмотрено в конструкции СИ. При поверке датчиков разности давлений в «минусовой» камере может поддерживаться постоянное опорное давление, создаваемое другим эталоном или основным задатчиком измеряемой величины с дополнительным блоком опорного давления.
При поверке датчиков разрежения и датчиков давления-разрежения значение измеряемой величины допускается устанавливать, подавая с противоположной стороны чувствительного элемента датчика соответствующее значение избыточного давления, если это предусмотрено конструкцией датчика.
-
4.3. Перед проведением поверки датчиков выполняют следующие подготовительные работы:
выдерживают датчик не менее 3 ч при температуре, указанной в п. 4.1, если иное не указано в технической документации на датчик;
-
— выдерживают датчик не менее 0,5 ч при включенном питании;
-
— устанавливают датчик в рабочее положение с соблюдением указаний технической документации;
-
— проверяют на герметичность в соответствии с п. п. 4.3.1 — 4.3.4 систему, состоящую из соединительных линий для передачи давления, эталонных СИ и вспомогательных средств для задания и передачи измеряемой величины.
-
4.3.1. Проверку герметичности системы, предназначенной для поверки датчиков давления, разности давлений, разрежения с верхними пределами измерений менее 100 кПа и датчиков абсолютного давления с верхними пределами измерений более 250 кПа, проводят при значениях давления (разрежения), равных верхнему пределу измерений поверяемого датчика.
Проверку герметичности системы, предназначенной для поверки датчиков давления-разрежения, проводят при давлении, равном верхнему пределу измерений избыточного давления.
Проверку герметичности системы, предназначенной для поверки датчиков разрежения с верхним пределом измерений 100 кПа, проводят при разрежении, равном 0,9 — 0,95 значения атмосферного давления.
Проверку герметичности системы, предназначенной для поверки датчиков абсолютного давления с верхними пределами измерений 250 кПа и менее, проводят в соответствии с п.
-
4.3.3.
-
4.3.2. При проверке герметичности системы, предназначенной для поверки датчиков, указанных в п. 4.3.1, устанавливают заведомо герметичный датчик или любое другое средство измерений с погрешностью измерений не более 2,5% от значений давления, соответствующих требованиям п. 4.3.1, и позволяющее зафиксировать 0,5% изменение давления от заданного значения.
Создают в системе давление, установившееся значение которого соответствует требованиям п. 4.3.1, после чего отключают источник давления. Если в качестве эталонного СИ применяют грузопоршневой манометр, то его колонку и пресс также отключают.
Систему считают герметичной, если после трехминутной выдержки под давлением, равным или близким верхнему пределу измерений датчика, не наблюдают падения давления (разрежения) в течение последующих 2 минут. При необходимости время выдержки под давлением может быть увеличено.
Допускается изменение давления (разрежения) в системе, обусловленное изменением температуры окружающего воздуха и рабочей среды в пределах +/-0,5… 1 °C.
-
4.3.3. Проверку герметичности системы, предназначенной для поверки датчиков абсолютного давления с верхними пределами измерений 250 кПа и менее, проводят следующим образом.
Устанавливают в системе заведомо герметичный датчик или любое другое средство измерений абсолютного давления, отвечающее требованиям к СИ в соответствии с п. 4.3.2. Создают в системе абсолютное давление не более 0,07 кПа и поддерживают его в течение 2 -3 минут, после чего отключают устройство, создающее абсолютное давление, и эталонное СИ при необходимости (например, отключают колонки грузопоршневого манометра).
После 3 минут выдержки изменение давления не должно превышать 0,5% верхнего предела измерений поверяемого датчика. Допускается поправка при изменении температуры окружающего воздуха и рабочей среды.
-
4.3.4, Проверку герметичности системы рекомендуется проводить при давлении (разрежении), соответствующем наибольшему давлению (разрежению) из ряда верхних пределов измерений поверяемых датчиков.
5. Проведение поверки
-
5.1. Внешний осмотр
При внешнем осмотре датчика устанавливают:
-
— соответствие его внешнего вида технической документации и отсутствие видимых дефектов;
-
— наличие клеммных колодок и (или) разъемов для внешних соединений, устройства для регулировки «нуля», клемм контроля выходного сигнала и др.;
-
— наличие дополнительных выходных устройств — электрических аналоговых или цифровых индикаторов и (или) других устройств, предусмотренных технической документацией на датчик;
-
— наличие на корпусе датчика таблички с маркировкой, соответствующей паспорту или документу, его заменяющему;
-
— наличие РЭ, если это предусмотрено при поверке датчика, паспорта или документа, его заменяющего.
-
5.2. Опробование
-
5.2.1. При опробовании проверяют герметичность и работоспособность датчика, функционирование устройства корректора «нуля». Работоспособность датчика проверяют, изменяя измеряемую величину от нижнего до верхнего предельных значений. При этом должно наблюдаться изменение выходного сигнала. Работоспособность датчиков давления-разрежения проверяют только при избыточном давлении; работоспособность датчиков разрежения с верхним пределом измерений 100 кПа проверяют при изменении разрежения до значения 0,9 атмосферного давления (не менее).
-
5.2.2. Проверку функционирования устройства корректора «нуля» выполняют следующим образом. Задав одно (любое) значение измеряемой величины в пределах, оговоренных руководством по эксплуатации, корректором «нуля» возвращают выходной сигнал (показания индикатора) к первоначальному значению. Затем сбрасывают измеряемую величину и при атмосферном давлении на входе в датчик корректором «нуля» вновь устанавливают выходной сигнал (показания индикатора) в соответствии с исходными значениями.
-
5.2.3 Проверку герметичности датчика рекомендуется совмещать с операцией определения его основной погрешности.
Методика проверки герметичности датчика аналогична методике проверки герметичности системы (п. п. 4.3.1 — 4.3.4), но имеет следующие особенности:
-
— изменение давления (разрежения) определяют по изменению выходного сигнала или по изменению показаний цифрового индикатора поверяемого датчика, включенного в систему (п. 4.3.2);
— в случае обнаружения негерметичности системы с установленным поверяемым датчиком следует раздельно проверить герметичность системы и датчика.
5.3. Определение основной погрешности
-
5.3.1. Основную погрешность датчика определяют по одному из способов:
-
1. По эталону СИ на входе датчика устанавливают номинальные значения входной измеряемой величины (например, давления), а по другому эталону измеряют соответствующие значения выходного аналогового сигнала (тока или напряжения). При поверке датчика по его цифровому сигналу к выходу подключают приемное устройство, поддерживающее соответствующий цифровой коммуникационный протокол для считывания информации при установленных номинальных значениях входной измеряемой величины.
-
2. В обоснованных случаях по эталонуу СИ устанавливают номинальные значения выходного аналогового сигнала (тока или напряжения) или устанавливают номинальные значения цифрового сигнала датчика, а по другому эталонуу СИ измеряют соответствующие значения входной величины (например, давления).
Примечания:
-
1. При поверке датчиков с HART-сигналом к выходу подключают портативный HART-коммуникатор, например «Rosemount НС-275», или HART-модем с программным обеспечением для связи с персональным компьютером и считывания информации с цифрового выхода датчика. Могут использоваться другие устройства для считывания информации и управления датчиками по другим коммуникационным протоколам, предусмотренным технической документацией на датчики.
-
2. При поверке датчиков с цифровым сигналом RS485 к выходу подключают модем RS485/USB с программным обеспечением для связи с персональным компьютером и считывания информации с цифрового выхода датчика. Могут использоваться другие устройства для считывания информации и управления датчиками по другим коммуникационным протоколам, предусмотренным технической документацией на датчики.
-
3. При поверке датчиков с релейным выходом (реле давления) поверяемый датчик и датчик — эталон подключаются к одному источнику давления. Выход релейного датчика подключается к кнопке “НОЬО”(“удержание”) цифрового вольтметра. Вход цифрового вольтметра подключается к эталону- резистору (приложение, схема 11).
-
4. При определении основной погрешности датчика показания его цифрового индикатора не учитываются.
-
5. Поверка датчиков с несколькими выходными сигналами, соответствующими одной и той же входной измеряемой величине, производится по одному из этих сигналов (аналоговому или цифровому), если иное не предусмотрено технической документацией на поверяемый датчик.
-
5.3.2. Схемы включения датчиков для измерения выходного сигнала при проведении поверки (п.5.3.1, способы 1 и 2) приведены в Приложении.
Эталоны входной величины (давления) включают в схему поверки в соответствии с их руководством по эксплуатации.
-
5.3.3. Устанавливают следующие критерии достоверности поверки:
Реал< — наибольшая вероятность, при которой любой дефектный экземпляр датчика может быть ошибочно признан годным;
(°’m)ea — отношение возможного наибольшего значения модуля основной погрешности экземпляра датчика, который может быть ошибочно признан годным, к пределу допускаемой основной погрешности.
Допускаемые значения критериев достоверности поверки: Рвам= 0,20 и (crrn)ga=l,25.
-
5.3.4. Устанавливают следующие параметры поверки:
т — число поверяемых точек в диапазоне измерений, т > 5; в обоснованных случаях и при отсутствии эталонных СИ с необходимой дискретностью воспроизведения измеряемой величины допускается уменьшать число поверяемых точек до 4 или 3;
п — число наблюдений при экспериментальном определении значений погрешности в каждой из поверяемых точек при изменениях входной измеряемой величины от меньших значений к большим (прямой ход) и от больших значений к меньшим (обратный ход), п = 1; в обоснованных случаях и в соответствии с технической документацией на датчик допускается увеличивать число наблюдений в поверяемых точках до 3 или 5, принимая при этом среднеарифметическое значение результатов наблюдений за достоверное значение в данной точке;
ук — абсолютное значение отношения контрольного допуска к пределу к допускаемой основной погрешности;
ар — отношение предела допускаемой погрешности эталонных СИ, применяемых при поверке, к пределу допускаемой основной погрешности поверяемого датчика.
Значения ук и ар выбирают по таблице 2 (п. 5.3.5) в соответствии с принятыми критериями достоверности поверки.
-
5.3.5. Выбор эталонных СИ для определения основной погрешности поверяемых датчиков осуществляют исходя из технических возможностей и технико-экономических предпосылок с учетом критериев достоверности поверки (п. 5.3.3) и в соответствии с таблицей 2.
Параметры и критерии достоверности поверки Таблица 2
|
OLp |
0,2 |
0,25 |
0,33 |
0,4 |
0,5 |
|
Yx |
0,94 |
0,93 |
0,91 |
0,82 |
0,70 |
|
р 1 вам |
0,20 |
0,20 |
0,20 |
0,10 |
0,05 |
|
(^т^ва |
1,14 |
1,18 |
1,24 |
1,22 |
1,20 |
Примечание. Таблица 2 составлена в соответствии с критериями достоверности поверки поп. 5.3.3 и согласно МИ 187-86 «ГСИ. Критерии достоверности и параметры методик поверки» и МИ 188-86 «ГСИ. Установление значений параметров методик поверки».
-
5.3.6. При выборе эталонных СИ для определения погрешности поверяемого датчика (в каждой поверяемой точке) соблюдают следующие условия:
где:
Р — входная измеряемая величина — разность давлений (перепад давления) для датчиков разности давлений, предназначенных для измерения расхода рабочей среды;
Рт — верхний предел измерений или диапазон измерений поверяемого датчика;
— расчетное значение выходного сигнала в цифровом формате;
Nm, No — соответственно верхнее и нижнее предельное значение выходного сигнала в цифровом формате.
-
5.3.8. Поверку датчиков с программным обеспечением выбора функции преобразования входной измеряемой величины в соответствии с одним из видов (5 — 6,9 -1 1) производят при программной установке линейно возрастающей зависимости выходного сигнала (5) или (9), если иное не предусмотрено технической документацией на датчик.
После выполнения поверки датчик может быть перепрограммирован в соответствии с требуемой функцией преобразования входной измеряемой величины.
Перед определением основной погрешности соблюдают требования п. 4.3 и, при необходимости, корректируют значения выходного сигнала, соответствующие нижнему и верхнему предельным значениям измеряемой величины. Эту корректировку выполняют после подачи и сброса измеряемой величины, значения которой устанавливают:
-
— для датчиков давления-разрежения — в пределах 50 — 100% от верхнего предела измерений в области избыточного давления;
-
— для датчиков абсолютного давления с верхним пределом измерений до 0,25 МПа включительно — в пределах от атмосферного давления до 80 — 100% верхнего предела измерений;
-
— для остальных датчиков — в пределах 80 — 100% верхнего предела измерений.
При периодической поверке и в случае ее совмещения с операцией проверки герметичности датчика корректировку значений выходного сигнала выполняют после выдержки датчика при давлении (разрежении) в соответствии с условиями п. 4.3.1, п. 4.3.2.
Установку выходного сигнала выполняют с максимальной точностью, обеспечиваемой устройством корректора датчика и разрешающей способностью эталонных СИ. Погрешность установки «нуля» (без учета погрешности эталонных СИ) не должна превышать 0,2 — 0,3 предела допускаемой основной погрешности поверяемого датчика, если иное не указано в технической документации.
Значение выходного сигнала, соответствующее нижнему предельному значению измеряемой величины, рассчитывают по одной из формул (5-7,9-11), полагая Р = 0 для датчиков давления-разрежения и датчиков разности давлений, для остальных датчиков -полагая Р = Рп (для стандартных условий Р = 0).
-
5.3.9. Основную погрешность определяют при m значениях измеряемой величины (п. 5.3.4), достаточно равномерно распределенных в диапазоне измерений, в том числе при значениях измеряемой величины, соответствующих нижнему и верхнему предельным значениям выходного сигнала.
Интервал между значениями измеряемой величины не должен превышать: 30% диапазона измерений при т = 5 (основной вариант поверки); 40% диапазона измерений при
-
1. При поверке датчика с выходным аналоговым сигналом постоянного тока, значения которого контролируют непосредственно в мА:
+
(1)


где:
АР — предел допускаемой абсолютной погрешности эталонного СИ, контролирующего входную величину (давление, кПа, МПа);
Рт — верхний предел измерений (или диапазон измерений) поверяемого датчика, кПа, МПа;
Д;— предел допускаемой абсолютной погрешности эталонного СИ, контролирующего электрический выходной сигнал датчика, мА;
1т , 10 — соответственно нижнее и верхнее предельные значения выходного сигнала датчика:
-
— для датчиков с выходным сигналом 4 — 20мА 10 =4 мА, 1т =20 мА;
-
— для датчиков с выходными сигналами 0 — 5 и 0 — 20 мА 10 = 0, 1т= 5 мА и 1т = 20 мА соответственно;
ар — то же, что в п. 5.3.4;
у — предел допускаемой основной погрешности поверяемого датчика, % от нормирующего значения.
За нормирующее значение принимают: для датчиков давления-разрежения — сумму абсолютных значений верхних пределов измерений в области избыточного давления и в области разрежения; для остальных датчиков — верхний предел измерений входной измеряемой величины, если иное не предусмотрено технической документацией на датчики.
Для датчиков с нижним предельным значением измеряемой величины, численно равным нулю, диапазон измерения численно равен верхнему пределу измерений. В этом случае основная погрешность датчика, выраженная в процентах от нормирующего значения, численно равна основной погрешности, выраженной в процентах от диапазона изменения выходного сигнала датчика с линейной функцией преобразования измеряемой величины.
-
2. При поверке датчиков с выходным аналоговым сигналом постоянного тока, значения которого контролируются по падению напряжения на эталоне- сопротивлении в Вольтах
яр • У

(2)
где:
Др, Рт — то же, что в формуле (1);
Ди — предел допускаемой абсолютной погрешности эталонного СИ, и контролирующего выходной сигнал датчика по падению напряжения на эталоне- сопротивлении, В;
Дг — предел допускаемой абсолютной погрешности эталона- сопротивления, Ом;
R.)m — значение эталона-сопротивления, Ом;
Um, Uo — соответственно верхнее и нижнее предельные значения напряжений в В на эталоне- сопротивлении, определяемые по формулам:
^т ’ Рэт И ^0 ^0 ‘ Рэт
При поверке датчиков с выходным аналоговым сигналом постоянного напряжения, значения которого контролируются непосредственно эталонным СИ в Вольтах (Uo = 0):

(3)
где:
Др, Рт— то же, что в формуле (1);
Ди — предел допускаемой абсолютной погрешности эталона, контролирующего выходной сигнал напряжения на выходе датчика, В;
Дг — предел допускаемой абсолютной погрешности эталона- сопротивления, Ом;
При поверке датчика с выходным цифровым сигналом:
(4)
где все обозначения те же, что и в формулах (1) и (2).
-
5.3.7. Расчетные значения выходного сигнала поверяемого датчика для заданного номинального значения входной измеряемой величины определяют по формулам (4 — 12):
1. Для датчиков с линейно возрастающей зависимостью выходного сигнала постоянного тока (/) от входной измеряемой величины (Р):

(5)
где:
/р — расчетное значение выходного сигнала постоянного тока (мА);
Р — номинальное значение входной измеряемой величины; для датчиков давления-разрежения значение Р в области разрежения подставляется в формулу (5) со знаком минус;
Рп — нижний предел измерений для всех датчиков, кроме датчиков давления-разрежения, для которых значение Рп численно равно верхнему пределу измерений в области разрежения Рт(_) и в формулу (5) подставляется со знаком минус;
1т, Ab Рт — ТО же, что и в формуле (1).
Для стандартных условий нижний предел измерений всех поверяемых датчиков избыточного давления, абсолютного давления, разрежения, разности давлений и датчиков давления-разрежения равен нулю.
2. Для датчиков с линейно убывающей зависимостью выходного сигнала постоянного тока от входной измеряемой величины:

(6)
-
3. Для датчиков с выходным сигналом постоянного тока, значения которого контролируют по падению напряжения на эталоне- сопротивлении R3m:

(7)
где:
ир — расчетное значение падения напряжения на эталоне- сопротивлении;
/р — расчетное значение выходного сигнала постоянного тока, определяемое по формулам (5-6).
Для датчиков с линейно возрастающей зависимостью выходного сигнала постоянного напряжения от входной измеряемой величины:

(8)
где:
ир — расчетное значение выходного сигнала постоянного напряжения;
Um — верхнее предельное значение напряжения выходного сигнала.
-
4. Для датчиков с выходным информационным сигналом в цифровом формате: — с линейно возрастающей функцией преобразования:
(9)

где:
/Vp— расчетное значение выходного сигнала в цифровом формате;
Nm, No — соответственно верхнее и нижнее предельные значения выходного информационного сигнала датчика в цифровом формате;
T’n, Р — то же, что и в формуле (5);
— с линейно убывающей функцией преобразования:

(Ю)
— с функцией преобразования по закону квадратного корня:


(Н)
т = 4; 60% диапазона измерений при т = 3.
Основную погрешность определяют при значении измеряемой величины, полученном при приближении к нему как со стороны меньших значений (при прямом ходе), так и со стороны больших значений (при обратном ходе).
Перед поверкой при обратном ходе датчик выдерживают в течение 1 минуты при верхнем предельном значении измеряемой величины, которому соответствует предельное значение выходного сигнала. Датчики давления-разрежения допускается выдерживать только при верхнем пределе измерений в области избыточного давления.
При периодической поверке основную погрешность определяют в два цикла: до корректировки диапазона изменения выходного сигнала и после корректировки диапазона. Второй цикл допускается не проводить, если основная погрешность уд < ук— у.
При поверке датчиков с верхним пределом измерения в области разрежения, равном ЮОкПа допускается устанавливать значение разрежения в области (0,90…0,95)% от атмосферного давления Рб, если Рб < ЮОкЯа. Расчетное значение выходного сигнала при установленном значении разрежения определяют по формуле (5) или (9).
При поверке датчиков абсолютного давления с верхними пределами измерений 0,25 МПа и выше основную погрешность определяют по методике, изложенной в п. 5.3.10, с соблюдением условий, изложенных в п. п. 5.3.8, 5.3.9. По методике п. 5.3.10 допускается определять основную погрешность датчиков абсолютного давления с верхними пределами измерений ниже 0,25 МПа, но не менее 0,1 МПа.
-
5.3.10. Определение основной погрешности датчиков абсолютного давления с верхними пределами измерений 0,25 МПа (допускается 0,1 МПа) и выше проводят с использованием эталонных СИ разрежения и избыточного давления (например, МВП — 2,5; «Воздух-0,4В»; «Воздух-6,3»; МП — 6; МП — 60 и др.).
В этом случае поверку датчика выполняют при подаче избыточного давления и разрежения, расчетные значения которых определяют с учетом действительного значения атмосферного давления в помещении, где проводят поверку.
Расчетные значения выходного сигнала датчика с линейно возрастающей функцией преобразования определяют по формулам:
-
— для датчиков с токовым выходным сигналом:
1р= 10+ (Н)
рт(а)
-
— для датчиков с цифровым выходным сигналом:
NP= /V„+ (W„- (12)
где:
/р, 1т, /о, Np, Nm, No — то же, что в формулах (5), (9).
Рбар ~ измеренное барометром атмосферное давление в помещении проведения поверки, МПа;
Рт(а) ‘ верхний предел измерений датчика абсолютного давления, МПа;
— избыточное давление,подаваемое в датчик, МПа;
-разрежение, создаваемое в датчике; значение разрежения в МПа подставляют в формулы (11) и (12) со знаком минус.
Расчетные значения избыточного давления и разрежения вычисляют по формулам:
РМ= Ра~ Рбар (13)
Р^= Рбар~ Ра (14)
где:
Ра — номинальное значение абсолютного давления, МПа.
Вблизи нуля абсолютного давления датчик поверяют, создавая на его входе разрежение:
P(m_j = (0,9 … 0,95) • Рбар (15)
при котором расчетное значение выходного сигнала определяют по формуле:
/р= /о+ (/m— (16)
rm(a)
Значения выходного сигнала в цифровом формате (N) или выходного сигнала в виде напряжения постоянного тока (U) определяют по формуле такой же структуры, заменяя обозначения тока I на обозначение N или U соответственно.
Расчетные значения выходного сигнала при атмосферном давлении на входе датчика определяют по формуле:
1р= /о+ Gm» 1о)~- (17)
рт(а)
Максимальное значение избыточного давления Р, при котором расчетное значение выходного сигнала 1р = 1т, определяют по формуле:
(18)
Рт(+) Рт(а) Рбар
При поверке датчиков с верхними пределами измерений Рт^ < 2,5 МПа значение атмосферного давления Рбар определяют с погрешностью не более чем:
^баР —
СГр
где:
Дбар — абсолютная погрешность, МПа;
ар, у — то же, что и в п.п. 5.3.4, 5.3.6;
Лп(а) ’ верхний предел измерения поверяемого датчика.
При поверке датчиков с верхними пределами измерений Рт^ > 2,5 МПа в формулы (11-18) допускается подставлять значение Рбар = 0,1МПа, если атмосферное давление находится в пределах 0,093 — 0,102 МПа.
В зависимости от верхних пределов измерений поверяемых датчиков их основную погрешность определяют при m значениях измеряемой величины в соответствии с таблицей 3 и с учетом требований п. 5.3.9.
Таблица 3
|
Верхний предел измерений, МПа |
Число поверяемых точек, т |
|
|
В области Рбар < Ра |
В области Рбар > Ра |
|
|
0,1 |
3 |
— |
|
0,16 |
2 |
2 |
|
0,25 |
1 |
3 |
|
От 0,4 до 2,5 |
1 |
4 |
|
Свыше 2,5 |
— |
5 |
Перед поверкой корректором «нуля» датчика устанавливают выходной сигнал на расчетное значение, соответствующее разрежению Р(т-)> в указанных пределах (15). Расчетное значение выходного сигнала определяют по формуле (16). Допускается устанавливать выходной сигнал на расчетное значение, определяемое по формуле (17), при атмосферном давлении.
-
5.3.11. Основную погрешность уд в % нормирующего значения (п. 5.3.6) вычисляют по приведенным ниже формулам.
При поверке датчиков по способу 1 (п.5.3.1):
|
уд= -ЮО 1т~ 1о |
(20) |
|
= _Ц-Цр_ . Гс) ит-и0 |
(21) |
|
N- Nn |
|
|
уд = ——2- • 100 Nm-N0 |
(22) |
где:
/ — значение выходного сигнала постоянного тока, полученное экспериментально при номинальном значении измеряемой величины, мА;
U — значение падения напряжения на эталоне- сопротивлении, полученное экспериментально при измерении выходного сигнала и номинальном значении входной измеряемой величины (давления), В;
N — значение выходного сигнала датчика в цифровом формате, полученное экспериментально при номинальном значении измеряемой величины.
Остальные обозначения те же, что в формулах (5, 6, 9).
Для датчиков с выходным сигналом напряжения можно использовать формулу (21), подставляя Uo = О
При поверке датчиков по способу 2 (п.5.3.1):
yd = £z^™.1Oo (23)
Pm
где:
Р — значение входной измеряемой величины (давления), полученное экспериментально при номинальном значении выходного сигнала, кПа, МПа;
Рном — номинальное значение измеряемой величины при номинальном значении выходного сигнала, кПа, МПа;
Рт — сумма абсолютных значений верхних пределов измерений датчиков давления-разрежения (Рт = Рт(+) + |^т(-)|). Для остальных датчиков — верхний предел измерений, кПа, МПа. Вычисления уд выполняют с точностью до второго знака после запятой.
-
5.4. Определение вариации
-
5.4.1. Вариацию выходного сигнала определяют при каждом поверяемом значении измеряемой величины, кроме значений, соответствующих нижнему и верхнему пределам измерений, поданным, полученным экспериментально при определении основной погрешности (п. 5.3).
-
5.4.2. Вариацию выходного сигнала уг в % нормирующего значения (п. 5.3.6) вычисляют по приведенным ниже формулам.
При поверке датчиков по способу 1 (п. 5.3.1):
Уг =

и- 1/*|
Uo
■ 100
Уг =
■ 100
-
(24)
-
(25)
-
(26)
где:
7,7* — значения выходного сигнала постоянного тока, полученные экспериментально при одном и том же номинальном значении входной измеряемой величины при прямом и обратном ходе соответственно, мА;
U, U* — значенияпадения напряжения на эталоне-сопротивлении, полученные экспериментально при измерениях выходного сигнала и при одном и том же номинальном значении входной измеряемой величины при прямом и обратном ходе соответственно, В;
N, N* — значения выходного сигнала датчика в цифровом формате, полученные экспериментально при одном и том же номинальном значении входной измеряемой величины при прямом и обратном ходе соответственно.
Остальные обозначения — те же, что в формулах (5, 6, 9).
При проверке датчиков по способу 2 (п.5.3.1):
У = ■ 100 (27)
где:
Р, Р* — значения входной измеряемой величины (давления), полученные экспериментально при прямом и обратном ходе и при одном и том же номинальном значении выходного сигнала, кПа, МПа;
Рт — то же, что в формуле (23).
-
5.5. Результаты поверки датчиков с линейной функцией преобразования
-
5.5.1. Датчик признают годным при первичной поверке, если на всех поверяемых точках модуль основной погрешности уд < ук ‘ 1/1, а значение вариации уг в каждой точке измерений не превышает предела ее допускаемого значения.
-
5.5.2. Датчик признают негодным при первичной поверке, если хотя бы в одной поверяемой точке модуль основной погрешности уд > ук ■ |у|, или значение вариации уг превышает предел ее допускаемого значения.
5.5.3 Датчик признают годным при периодической поверке, если на всех поверяемых точках при первом или втором цикле поверки выполняются условия, изложенные в п. 5.5.1.
-
5.5.4. Датчик признают негодным при периодической поверке если:
-
— при первом цикле поверки хотя бы в одной поверяемой точке модуль основной погрешности |yj > (<5m)eamax‘ |у|, или значение вариации у превышает предел ее допускаемого значения;
-
— при втором цикле поверки хотя бы в одной поверяемой точке модуль основной погрешности |уд| > ук ■ |у| или значение вариации у, превышает предел ее допускаемого значения;
Обозначения: (5m)gamax — поп. 5.3.3; ук — по п. 5.3.4; у-по п. 5.3.6.
-
5.5.5. Допускается вместо вычислений по экспериментальным данным значений основной погрешности уд и вариации уг контролировать их соответствие предельно допускаемым значениям.
-
5.5.6. Вариацию выходного сигнала датчиков не определяют, если предел ее допускаемого значения не превышает 0,5 предела допускаемой основной погрешности.
-
5.6. Результаты поверки датчиков с неизменной (жестко запрограммированной) функцией преобразования измеряемой величины по закону квадратного корня.
-
5.6.1. Датчик признают годным при первичной поверке по способу 1 (п. 5.3.1), если на всех поверяемых точках модуль основной погрешности у , выраженной в % диапазона изменения выходного сигнала, не превышает пределов допускаемых значении в соответствии с условием (28), а значение вариации уг не превышает пределов ее допускаемых значений в соответствии с условием (29).
2-(N,/cw— Wo)

(28) (29)
где:
NH0M — номинальное значение выходного сигнала в поверяемой точке в цифровой форме.
у — предел допускаемой основной погрешности в % верхнего предела измерений поверяемого датчика;
Уг[доп) • пределдопускаемого значения вариации в % верхнего предела измерений поверяемого датчика.
Основную погрешность у0 и вариацию уг определяют в интервале значений выходного сигнала (30), если иное не указано в технической документации на датчик.
(30),
-
5.6.2. Датчик признают негодным при первичной поверке, если хотя бы в одной поверяемой точке не выполняются условия (28) и (29).
-
5.6.3. Датчик признают годным при периодической поверке, если на всех поверяемых точках при первом или втором цикле поверки выполняются условия (28) и (29).
-
5.6.4. Датчик признают негодным при периодической поверке если при первом цикле поверки хотя бы в одной поверяемой точке модуль основной погрешности |yd|, выраженной в % от диапазона изменения выходного сигнала, превышает пределы допускаемых значений (31) или значения вариации у, превышают пределы допускаемых значений (29):
(31)

-
5.7. Поверка датчиков с релейным выходом проводится по схеме XX приложения. Давление плавно увеличивается на входе поверяемого и датчика-эталона до срабатывания реле в выбранной точке диапазона измерения. В момент срабатывания показания цифрового вольтметра фиксируются по сигналу реле поверяемого датчика.
-
5.7.1. Датчик признается годным, если условие (32) выполняется в нескольких (3 — 5) точках диапазона измерения поверяемого датчика:
где:

Руст — установленное значение точки срабатывания датчика с релейным выходом;
РНОЛ1 — давление, зафиксированное образцовым датчиком;
|у| — пределы основной допускаемой погрешности датчика с релейным выходом;
Р„ОЛ1 определяется по выходной характеристике датчика-эталона с нижним пределом измерения Ро = 0:
РпМ, = Рт ■ (33)
‘т ‘о
где:
1ном — выходной ток датчика- эталона в момент срабатывания, фиксируемый цифровым вольтметром по падению напряжения на эталоне — резисторе;
При невыполнении условия (32) хотя бы водной точке диапазона измерения поверяемый датчик признается негодным.
6. Оформление результатов
-
6.1 Датчик давления Корунд прошедший поверку с положительным результатом, признается годным и допускается к применению. На него оформляется свидетельство о поверке в соответствии с Приказом № 1815 Минпромторга России от 02 июля 2015 г. и (или) ставится знак поверки в паспорт и делается соответствующая запись в разделе «Свидетельство о поверке».
-
6.2 При отрицательных результатах поверки, в соответствии с Приказом № 1815 Минпромторга России от 02 июля 2015 г., оформляется извещение о непригодности. Датчики к дальнейшей эксплуатации не допускают.
Главный инженер ООО «СТЭНЛИ»
Д.И. Моисеев
А.И. Гончаров
Начальник лаборатории 207.1
Схемы включения датчиков при поверке
Схема 1. Включение датчика с аналоговым сигналом 4-20 мА, измеряемого непосредственно миллиамперметром.

Р — входная измеряемая величина, устанавливаемая задатчиком давления в соответствие с табл. 1 п.2.1;
mA — миллиамперметр в соответствие с табл.1 п.2.1.;
Идол — нагрузочное сопротивление в соответствие с табл. 1 п.2.1. Величина сопротивления должна соответствовать п.4.1, п/п 5).
Схема 2. Включение датчика с аналоговым сигналом 4-20 мА, измеряемого через падение напряжения на эталоне резисторе вольтметром.

Р — входная измеряемая величина устанавливаемая задатчиком давления в соответствие с табл. 1 п.2.1;
mA — миллиамперметр в соответствие с табл. 1 п.2.1.;
R.3T — эталонное нагрузочное сопротивление (например, катушка сопротивления) в соответствие с табл. 1 п.2.1. Величина сопротивления должна соответствовать п.4.1, п/п 5).
Схема 3. Включение датчика с аналоговым выходным сигналом 0-5 мА или 0-20 мА, измеряемого измеряемого непосредственно миллиамперметром.

Р — входная измеряемая величина устанавливаемая задатчиком давления в соответствие с табл. 1 п.2.1;
А — миллиамперметр в соответствие с табл. 1 п.2.1.;
Кдоп — нагрузочное сопротивление (например, катушка сопротивления) в соответствие с табл. 1 п.2.1. Величина сопротивления должна соответствовать п.4.1, п/п 5).
Схема 4. Включение датчика с аналоговым сигналом 0-5 мА или 0-20 мА, измеряемого через падение напряжения на эталоне- резисторе вольтметром.

Р — входная измеряемая величина устанавливаемая задатчиком давления в соответствие с табл. 1 п.2.1;
mA — миллиамперметр в соответствие с табл. 1 п.2.1.;
Rot — эталонное нагрузочное сопротивление (например, катушка сопротивления) в соответствие с табл. 1 п.2.1. Величина сопротивления должна соответствовать п.4.1, п/п 5).
Схема 5. Включение датчика с аналоговым сигналом 0-5 В или 0-10 В, измеряемого непосредственно вольтметром.

Р — входная измеряемая величина устанавливаемая задатчиком давления в соответствие с табл. 1 п.2.1;
V — вольтметр в соответствие с табл. 1 п.2.1.;
Схема 6, Включение датчика с цифровым сигналом на базе протокола HART и считывании информации по цифровому каналу при помощи коммуникатора.

Р — входная измеряемая величина устанавливаемая задатчиком давления в соответствие с табл. 1 п.2.1;
Н — HART коммуникатор в соответствие с табл.1 п.2.1.
Схема 7. Включение датчика с цифровым сигналом на базе протокола HART и считывании информации по цифровому каналу при помощи HART модема и персонального компьютера.

Р — входная измеряемая величина, устанавливаемая задатчиком давления в соответствие с табл. 1 п.2.1;
HART/USB — Преобразователь сигналов HART в сигналы интерфейса USB для связи датчика с персональным компьютером через его стандартный последовательный порт в соответствие с табл. 1 п.2.1;
ПК — персональный компьютер соответствие с табл. 1 п.2.1 .
Схема 8. Включение датчика на базе протокола HART при считывании информации по цифровому каналу при помощи HART модема и персонального компьютера, а также измерении аналогового сигнала посредством регистрации падения напряжения на эталоне резисторе.
V

Р — входная измеряемая величина, устанавливаемая задатчиком давления в соответствие с табл. 1 п.2.1;
V- вольтметр в соответствие с табл. 1 п.2.1;
Rot — эталон — нагрузочное сопротивление (например, катушка сопротивления) в соответствие с табл. 1 п.2.1. Величина сопротивления должна соответствовать п.4.1, п/п 5); Идол — дополнительный резистор или магазин сопротивления. Величина Идол подбирается исходя из формулы Кэт + Идол = 2500м;
HART/USB — Преобразователь сигналов HART в сигналы интерфейса USB для связи датчика с персональным компьютером через его стандартный последовательный порт в соответствие с табл. 1 п.2.1;
ПК — персональный компьютер соответствие с табл. 1 п.2.1 .
Схема 9. Включение датчика на базе протокола HART при считывании информации по цифровому каналу при помощи HART модема и персонального компьютера, а по аналоговому токовому каналу — непосредственно миллиамперметром.

Р — входная измеряемая величина, устанавливаемая задатчиком давления в соответствие с табл. 1 п.2.1;
А — миллиамперметр в соответствие с табл. 1 п.2.1;
1<доп — нагрузочное сопротивление (например, катушка сопротивления) в соответствие с табл. 1 п.2.1. Величина сопротивления должна соответствовать п.4.1, п/п 5);
HART/USB — Преобразователь сигналов HART в сигналы интерфейса USB для связи датчика с персональным компьютером через его стандартный последовательный порт (табл. 1 п.2.1); ПК — персональный компьютер соответствие с табл. 1 п.2.1.
Схема 10. Включение датчика с цифровым выходным сигналом на базе протокола ModBus при считывании информации по цифровому каналу с помощью модема на базе интерфейса RS-485 и персонального компьютера.

Р — входная измеряемая величина, устанавливаемая задатчиком давления в соответствие с табл. 1 п.2.1;
RS485/USB — модем на базе интерфейса RS485 для для связи датчика с персональным компьютером через USB порт в соответствие с табл. 1 п.2.1;
ПК — персональный компьютер соответствие с табл. 1 п.2.1.
Схема 11. Включение датчика с дискретным выходным сигналом

Р — входная измеряемая величина, устанавливаемая задатчиком давления в соответствие с табл. 1 п.2.1;
Д-ДС — датчик с дискретным сигналом замыкания (размыкания);
ВЦ — вольтметр цифровой GW Instek GDM78251А имеющий функцию «HOLD»;
ОД — эталон — датчик давления в соответствие с табл. 1 п.2.1;
R.3T- эталон нагрузочного сопротивления (например, катушка сопротивления) в соответствие с табл. 1 п.2.1. Величина сопротивления должна соответствовать п.4.1. п/п 5).
Схема 12. Подключение к эталону измеряемой величины

ЭЗ — эталон (давление, разрежение, разность давлений) в соответствии с табл. 1 п.2.1
Схема 13. Подключение к датчику -эталону.

ОД — эталон (давление, разрежение, разность давлений) в соответствие с табл. 1 п.2.1; ИВ — Источник измеряемой величины (давление, разрежение, разность давлений) в соответствие с табл. 1 п.2.1;