
Установка
Эксплуатация
Техническое обслуживание
Техника безопасности
РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ
Цифровые позиционеры
серии Logix
®
420
FCD LGRUIM0106-06 – 12/13

-
Contents
-
Table of Contents
-
Troubleshooting
-
Bookmarks
Quick Links
USER INSTRUCTIONS
Installation
Logix
420
®
Operation
Digital Positioner
Maintenance
FCD LGENIM0106-07-AQ– 10/15
Safety Manual
Experience In Motion
Related Manuals for Flowserve Logix 420
Summary of Contents for Flowserve Logix 420
-
Page 1
USER INSTRUCTIONS Installation Logix ® Operation Digital Positioner Maintenance FCD LGENIM0106-07-AQ– 10/15 Safety Manual Experience In Motion… -
Page 2: Table Of Contents
14.1 TROUBLESHOOTING GUIDE MOUNTING TO NAMUR VALVES 14.2 STATUS CODE INDEX 6 TUBING 14.3 STATUS CODE DESCRIPTIONS DETERMINE AIR ACTION 14.4 HELP FROM FLOWSERVE CONNECT SUPPLY PORT 15 POSITIONER DIMENSIONS VENTED DESIGN 15.1 POSITIONER DIMENSIONS PURGING 16 HOW TO ORDER 7 ELECTRICAL CONNECTIONS 16.1 POSITIONERS…
-
Page 3: Using This Document
420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® 1 General Information 1.3 Protective Clothing FLOWSERVE positioners use high pressure gas to operate. Use eye 1.1 Using This Document protection when working around pressurized equipment. Follow proper procedures for working with natural gas if it is used.
-
Page 4: Basic Operation
The Logix 420 digital positioner is an electronic and pneumatic closed- FLOWSERVE provides pinch-point-protection in the form of cover loop feedback instrument. Figure 1 shows a schematic of a Logix 420 plates, especially where side-mounted positioners are fitted. If these…
-
Page 5: Outer Loop
• Actuator is tubed and positioner is configured air-to-open. The Logix 420 uses a two-stage, stem-positioning algorithm. The two Given these conditions, 12 mA represents a Command source of 50 stages consist of an inner-loop (pilot relay control) and an outer-loop percent.
-
Page 6: Specifications
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® 2 SPECIFICATIONS 2.4 Pneumatic Output Table 4: Pneumatic Output 2.1 Input Signal Output Pressure Range 0 to 100% of air supply pressure. Single Acting Relay – Table 1: Input Signal 9.06 Nm³/h @ 1.5 bar Output Air Capacity (5.33 SCFM @ 22 PSI) Two-wire, 4-20 mA…
-
Page 7: Hazardous Area Certifications
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® 3 HAZARDOUS AREA CERTIFICATIONS Table 9: Logix 420 Series Hazardous Locations Information ATEX North America (cFMus) Explosion Proof/Flame Proof Explosion Proof FM13ATEX0097X Class I, Div 1, Groups B,C,D II 2 G…
-
Page 8: Storage And Unpacking
FLOWSERVE Control valve packages (a control valve and its instru- mentation) are typically well protected from corrosion. Nevertheless FLOWSERVE products must be stored in a clean, dry environment such as an enclosed building that affords environmental protection. Heating is not required. Control valve packages must be stored on suitable skids, not directly on the floor.
-
Page 9: Mounting And Installation
7. Connect the power to the 4-20 mA terminals. See section 7 the DTM. ELECTRICAL CONNECTIONS. 8. Remove main cover and locate DIP switches and QUICK-CAL/ ACCEPT button. Actuator Actuator O-ring Take-Off Take-Off Plate Take-Off Plate Screws flowserve.com Figure 2: Valtek GS and FlowTop Mounting…
-
Page 10: Mounting To Namur Valves
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® 5. Connect the power to the 4-20 mA terminals. See section 7 Table 10: FlowTop and GS Take-Off Plate and Pin Configurations ELECTRICAL CONNECTIONS. Plate and Pin Stroke 6. Remove main cover and locate DIP switches and QUICK-CAL/ Actuator (mm) Orientation…
-
Page 11: Tubing
® 6 TUBING 6.3 Vented Design A standard Logix 420 positioner is vented directly to the atmosphere. After mounting has been completed, tube the positioner to the actuator When supply air is substituted with sweet natural gas, piping must be using the appropriate compression fitting connectors.
-
Page 12: Electrical Connections
(10.0 V) therefore; this system will support the Logix 420. The Logix 420 has an input resistance equivalent to 500 Ω at a 20 mA input The Logix 420 requires that the current loop system allow for a 10 VDC current.
-
Page 13
5000 feet. For cable runs longer than 5000 feet, 20 AWG cable should be used. The input loop current signal to the Logix 420 digital positioner should be in shielded cable. Shields must be tied to a ground at only one end of the cable to provide a place for environmental electrical noise to be removed from the cable. -
Page 14: Connections For Intrinsically Safe Operation
7.2.5 Electromagnetic Compatibility When selecting an intrinsically safe barrier, make sure the barrier is The Logix 420 digital positioner has been designed to operate correctly HART compatible. Although the barrier will pass the loop current and in electromagnetic (EM) fields found in typical industrial environments.
-
Page 15: Quick Start Instructions
20 mA for Air-To-Close.. 8.2 Local User Interface Overview The Logix 420 local user interface allows the user to calibrate, configure 4 mA – Selecting 4 mA will make the valve close when the signal is low the basic operation, and tune the response of the positioner without (4 mA) and open when the signal is high (20mA).
-
Page 16: Stroke Calibration
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® 8.3.6 Valve Stability Switch generally opens less than the input command. To select one of the other curve options, use the LCD menu, a Handheld or the ValveSight This switch adjusts the position control algorithm of the positioner for DTM.
-
Page 17
It may be necessary to set the gain switch BEFORE the Quick Cal. Very fast stroking valves may need to be at lower gains and very slow stroking valves may need to be at higher gains. flowserve.com… -
Page 18: Positioner Functions (No Display Required)
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® 9 POSITIONER FUNCTIONS 9.3 Command Source Reset Performing a command source reset will reset the command source (No Display Required to analog if it has been inadvertently left in digital mode. This is done The following features can be performed using the local interface.
-
Page 19: Viewing Version Numbers
Curve, MPC, or Soft Limits that have been applied and should match the Position. For example, if holding the ▲ Up button gave a G-G-R code, and holding the ▼ Down gave a Y-Y-G code then the resulting version number would be 2.12. flowserve.com…
-
Page 20
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® 10.1.2 Scrolling Status Messages and responds to the position command given through HART. In Out Of Service mode, the positioner is performing a calibration, signature, The Scrolling Status Message provides the following information as partial stroke test or is in a factory reset state. -
Page 21: Menu Overview
EC Major Rev Partial Stroke Test EC Minor Rev Start EC Build Date and Time Last Result Universal Rev Hardware Rev Calibration Factory Reset Stroke/Quick Calibration Language Command Input Calibration Calibration Dates English German French Spanish Portuguese Russian Turkish Italian flowserve.com…
-
Page 22: Menu Features
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® 10.3 Menu Features 10.2.3 Partial Stroke Test ► Partial Stroke Test 10.3.1 Status ► Start ► Status ► Last Result ► Command (mA) The Partial Stroke Test (PST) menu provides the user the ability to start ►…
-
Page 23
ValveSight DTM to select the curve. P-Gain, I-Gain and D-Gain are the proportional, integral, and differen- tial elements of the feedback algorithm. These gains are different for the opening and closing directions because typically responsiveness is flowserve.com different in each direction. -
Page 24
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® Table 13: Characteristic Curve Data Final Command Characterization DIP set Characterization DIP set to “Other” Command to“Linear” Input Custom Shear- Stream Shear- Stream Linear MaxFlo Linear MaxFlo =% Valdisk Linear Valdisk =% (Default) Linear (Linear =%) -
Page 25
► All Units ► Temperature Units NOTE: The pressure control feature of the Logix 420 functions without ► Actuator Area Units the use of pressure sensors. In the DTM, this feature is configured on ►… -
Page 26
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® 10.3.10 Configuration (Burst Mode) 10.3.13 Language ► Configuration ► Language ► Burst Mode ► English ► On/Off ► German ► French Burst Mode continuously transmits HART information. ► Spanish ► Portuguese On/Off –… -
Page 27: Hart Communication
Figure 13: ValveSight DTM Dashboard 11.2 HART 475 Handheld Communicator The Logix 420 digital positioner supports and is supported by the HART 475 Handheld Communicator. The Device Description (DD) files can be obtained from the HART Communication Foundation or from your Flowserve representative.
-
Page 28: Requirements For Safety Integrity
12.2 Safety Function 12.6 Maximum Achievable SIL The Logix 420 positioner moves to fail-safe state upon the removal of The Flowserve 420 Valve Positioner covered by this safety manual analog input power (less than 3.6 mA)
-
Page 29: Proof Testing
The objective of proof testing when used in low demand mode of opera- 3. View the results of the PST via the LCD menu, DD, or DTM. tion is to detect failures within the Flowserve 420 Valve Positioner and its associated sensors and actuators that may not be detected by the 4.
-
Page 30: Maintenance And Repair
5. Replace the inner cover by inserting the 6 retaining screws. 6. Calibrate. 13.2 Required Tools and Equipment The Logix 420 digital positioner has modular components that can be replaced using these tools: Hall Sensor Connector…
-
Page 31: Troubleshooting
ValveSight and recalibrate. LCD backlight flickering 1. The backlight uses any residual power not used by other func- 1. Fluctuations in the LCD backlight are normal. No action required. or dim. tions of the circuitry. flowserve.com…
-
Page 32: Status Code Index
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® 14.2 Status Code Index Table 16: Status Code Index Status Code Name Blink Code Position Range Too Small RGGY Command Input Below ADC Range RGGG Position Sensor Above ADC Range RGGY Command Input Above ADC Range RGGG Command Input Calibration in Progress…
-
Page 33: Status Code Descriptions
4-20 mA signal by using a handheld, the Dashboard page of the DTM, or performing a manual Command Reset. Perform the Command Reset by holding both the UP and DOWN buttons and briefly pressing the QUICK-CAL/ACCEPT button. flowserve.com…
-
Page 34
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® GRGY YGGY STROKE CALIBRATION IN PROGRESS PILOT RELAY CYCLES WARNING SETTING INNER LOOP OFFSET PILOT RELAY TRAVEL WARNING COMMAND INPUT CALIBRATION IN PROGRESS VALVE CYCLES WARNING VALVE TRAVEL WARNING Description: A calibration sequence is in progress. The inner loop offset is an important step of the stroke calibration. -
Page 35
The minimum angle of rotation should be assembly. Maintain a clean, water-free air/gas supply. greater than 15 degrees. Briefly pressing the QUICK-CAL/ACCEPT button acknowledges a small range and the positioner will operate using the short stroke calibration if otherwise a good calibration. flowserve.com… -
Page 36
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® RGGR RGRY INNER LOOP OFFSET TIME OUT STROKE SHIFT Description: During calibration the Inner Loop Offset (ILO) value did not Description: The 0% and 100% valve positions have both shifted in the settle. -
Page 37
Hall sensor circuit has failed. assembly or the sensor has failed. Possible Solutions: Check the internal wiring connections. Replace the Possible Solutions: Check the feedback arm linkage. Recalibrate. If the pilot relay. problem persists return the unit for repair. flowserve.com… -
Page 38
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® RRRY PIEZO VOLTAGE HIGH ALARM Description: The voltage driving the piezo is above the alarm limit. This could indicate an error with the relay or the main board. The positioner may still be functioning, but have reduced performance under some circumstances. -
Page 39: Help From Flowserve
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® 14.4 Help From Flowserve 14.4.1 Phone Support Over-the-phone troubleshooting is often available for positioner issues. Should your positioner be experiencing problems, or if you have ques- tions that are not answered by this manual, feel free to call your local sales representative or a Quick Response Center (QRC).
-
Page 40: Positioner Dimensions
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® 15 POSITIONER DIMENSIONS 15.1 Positioner Dimensions Figure 17: Overall Dimensions…
-
Page 41: How To Order
16 HOW TO ORDER 16.1 Positioners Table 17: 420 Positioner Configurations Selection Description Code Example Base Model Logix 420 Communications HART 6 (HART 7 Configurable) Diagnostics Standard (Basic Functionality) Certifications General Purpose Certifications Intrinsically Safe, IP66, Explosion Proof Cl I Div 1 Gr. B,C,D, Ex d IIB+H2 Certifications Housing: Aluminum;…
-
Page 42: Index
Logix 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15 ® INDEX Air Action Switch · 15 Main Board · 30 Air Supply · 6 Maintenance · 8, 29, 30 Auto Tune Switch · 16 MaxFlo Rotary Valves · 10 Minimum Close Time · 23 Minimum Open Time ·…
-
Page 43
Troubleshooting · 12, 31 Tubing · 11 Tuning · 18, 23 Valtek GS · 9 Valve Cycles · 22 Valve Stability Switch · 16 Valve Travel · 22 ValveSight DTM · 6, 27 Vented Design · 11 Version Numbers · 19, 26 flowserve.com… -
Page 44
Flowserve Corporation has established industry leadership in the design and manufacture of its products. When properly selected, this Flowserve product is designed to perform its intended function safely during its useful life. However, the purchaser or user of Flowserve products should be aware that Flowserve products might be used in numerous applications under a wide India 560 066 variety of industrial service conditions.
Инструкция и руководство для
Flowserve Logix 420 IOM  на русском
на русском

44 страницы подробных инструкций и пользовательских руководств по эксплуатации
 04:20
04:20
Troubleshooting a Flowserve Digital Positioner
 05:07
05:07
Logix 420 disassembly
 03:01
03:01
Logix™ 3200 Positioner Calibration
 02:55
02:55
Flowserve FAST Tester Connect and Calibrate HART Positioner
 04:46
04:46
Mounting Flowserve Logix 3000 Series Positioners to Rotary Actuators
 03:09
03:09
Logix™ 3800 Positioner Quick Calibration
 09:25
09:25
Flowserve Control Valve — Performance Test
 06:03
06:03
Logix™ 3200MD Positioner Internal Regulator Maintenance and Repair
Установка Эксплуатация Техническое обслуживание Техника безо…
Руководство пользователя
- Изображение
- Текст
Установка
Эксплуатация
Техническое обслуживание
Техника безопасности
РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ
Цифровые позиционеры
серии Logix
®
420
FCD LGRUIM0106-06 – 12/13

Руководство пользователя — Цифровые позиционеры серии Logix
®
420 FCD LGRUIM0106-06 – 12/13
2
Оглавление
Инструкции по быстрому пуску 15
1 ОБЩИЕ СВЕДЕНИЯ
3
1.1 Пользование данным документом
3
1.2 Термины, связанные с техникой безопасности
3
1.3 Спецодежда
3
1.4 Квалифицированный персонал
3
1.5 Влияние конструктивных изменений клапана и привода 3
1.6 Запасные части
3
1.7 Обслуживание и ремонт
3
1.8 Общие сведения
4
1.9 HART
4
1.10 Определение положения
4
1.11 Входной сигнал и команда управления
4
1.12 Внешний контур
5
1.13 Внутренний контур
5
1.14 Подробное описание работы позиционера
5
1.15 IСмещение внутреннего контура
5
2 ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
6
2.1 Входной сигнал
6
2.2 Питающий воздух
6
2.3 Физические характеристики
6
2.4 Пневматический выходной сигнал
6
2.5 Угол поворота вала
6
2.6 Температура
6
2.7 Эксплуатационные характеристики позиционера
6
2.8 Требования для использования ПО ValveSight DTM
6
3 СЕРТИФИКАЦИЯ ДЛЯ ОПАСНЫХ ЗОН
7
4 ХРАНЕНИЕ И РАСПАКОВКА
8
4.1 Хранение
8
4.2 Распаковка
8
4.3 Проверка перед установкой
8
5 МОНТАЖ И УСТАНОВКА
9
5.1 Непосредственная установка на клапанах
Valtek GS и Flow Top
9
5.2 Присоединение к клапанам по стандарту NAMUR
10
6 ТРУБНАЯ ПРОВОДКА
11
6.1 Определение вида действия
11
6.2 Подключение питающего воздуха
11
6.3 Вентилируемое исполнение
11
6.4 Продувка
11
7 ЭЛЕКТРИЧЕСКИЕ СОЕДИНЕНИЯ
12
7.1 Клеммы для подключения
12
7.2 Подключение командного входного сигнала (4-20 мА) 12
7.3 Подключение для эксплуатации позционера с видом
взрывозащиты «искробезопасная» цепь
14
8 ПУСК
15
8.1 Инструкции по быстрому пуску
15
8.2 Местный пользовательский интерфейс
15
8.3 Установка переключателей параметров конфигурации 15
8.4 Калибровка хода
16
9 ФУНКЦИИ ПОЗИЦИОНЕРА
(исполняемые без использования дисплея)
18
9.1 Оперативная настройка
(регулировка коэффициента усиления)
18
9.2 Местное управление клапаном
18
9.3 Восстановление исходного состояния
источника командного сигнала
18
9.4 Восстановление заводских настроек
19
9.5 Проверка номера версии
18
10 ФУНКЦИИ ПОЗИЦИОНЕРА (ЖК дисплей)
19
10.1 Главный экран
19
10.2 Основное меню
21
10.3 Разделы меню
22
11 ОБМЕН ДАННЫМИ ПО КАНАЛУ HART
27
11.1 ValveSight DTM
27
11.2 Ручной коммуникатор HART 475
27
11.3 Режим пакетной передачи
27
11.4 CИзменение версии протокола HART
27
12 ТРЕБОВАНИЯ К ПОЛНОТЕ БЕЗОПАСНОСТИ
28
12.1 Отказобезопасное состояние
28
12.2 Функция безопасности
28
12.3 Время перехода в отказобезопасное состояние
28
12.4 Установка
28
12.5 Требуемые параметры конфигурации
28
12.6 Максимальный достижимый уровень
полноты безопасности
28
12.7 Показатели надежности
28
12.8 Ресурсные характеристики
29
12.9 Проверочные испытания
29
12.10 Техническое обслуживание
29
12.11 Ремонты и замены
29
12.12 Требования к подготовке персонала
29
13 ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ И РЕМОНТ
30
13.1 Плановое обслуживание
30
13.2 Требуемые инструменты и оборудование
30
13.3 Замена главной платы
30
14 ПОИСК И УСТРАНЕНИЕ НЕИСПРАВНОСТЕЙ
31
14.1 Указания по поиску и устранению неисправностей
31
14.2 Указатель кодов состояния
32
14.3 Описание кодов состояния
33
14.4 Сопровождение эксплуатации компанией Flowserve
39
15 РАЗМЕРЫ ПОЗИЦИОНЕРА
40
15.1 Размеры позиционера
40
16 ИНФОРМАЦИЯ ДЛЯ ЗАКАЗА
41
16.1 Позиционер
41
16.2 Комплекты запасных частей
41
16.3 Монтажные комплекты
41
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
42

1 общие сведения, 1 пользование данным документом, 2 термины, связанные с техникой безопасности
3 спецодежда, 4 квалифицированный персонал, 6 запасные части
- Изображение
- Текст
3
Руководство пользователя — Цифровые позиционеры серии Logix
®
420 FCD LGRUIM0106-06 – 12/13
1 Общие сведения
1.1 Пользование данным документом
Пользователи и обслуживающий персонал должны внимательно
прочесть настоящее руководство перед монтажом, вводом в
эксплуатацию или обслуживанием позиционера.
Ниже приводятся инструкции по распаковке, монтажу и техническому
обслуживанию позиционеров Logix® 420.
Для запорно-регулирующей арматуры, приводов, частей систем и
дополнительных усторойств предусматриваются отдельные руководства
по эксплуатации, в которых можно найти необходимую информацию.
В большинстве случаев запорно-регулирующая арматура, приводы
и дополнительное оборудование FLOWSERVE предназначаются для
конкретных условий эксплуатации (в частности, для определенных
рабочих сред, давлений и температур). Поэтому до начала
эксплуатации в других условиях необходимо проконсультироваться с
компанией-изготовителем
Во избежание травм и повреждений деталей позиционера соблюдайте
указания по технике безопасности, выделенные заголовками ОПАСНО и
ПРЕДУПРЕЖДЕНИЕ.
Изменение данного изделия, замена его деталей на детали незаводского
изготовления или использование процедур технического обслуживания,
отличных от описанных может существенно ухудшить эксплуатационные
характеристики и создать опасные факторы для персоналии и
оборудования, а также привести к потере действующих гарантий.
1.2 Термины, связанные с техникой
безопасности
В настоящем руководстве используются термины ОПАСНО,
ПРЕДУПРЕЖДЕНИЕ и ПРИМЕЧАНИЕ для указания конкретных опасных
факторов и сообщения дополнительной, неочевидной информации.
ПРИМЕЧАНИЕ: Служит для выделения в тексте документа
дополнительных технических сведений, которые могут быть не вполне
ясны даже для квалифицированного персоналаl.
1
ПРЕДУПРЕЖДЕНИЕ: Указывает условия, которые могут стать
причиной легкой травмы и повреждения оборудования, если не
приняты соответствующие меры предосторожности.
!
ОПАСНО: Указывает условия, которые являются причиной
тяжелых травм, в том числе и со смертельным исходом,
а также значительных повреждений имущества и/или
оборудования, если не приняты соответствующие меры
предосторожности.
Во избежание неисправностей, которые могут непосредственно или
косвенно привести к тяжелым травмам или повреждению имущества/
оборудования, следует руководствоваться и другими, особо не
выделенными замечаниями относительно транспортировки, сборки,
эксплуатации и технического обслуживания, а также указаниями,
приведенными в технической документации (например, в руководствах
по эксплуатации, документации на изделия или на табличках,
прикрепленных к изделиям).
1.3 Спецодежда
Для эксплуатации позиционеров FLOWSERVE используется газ
высокого давления. При работах рядом с оборудованием под давлением
используйте средства защиты глаз. Соблюдайте правила безопасности
при обращении с природным газом.
!
ОПАСНО: При работе на данном устройстве и других средствах
регулирования технологических параметров соблюдайте
общепринятые промышленные правила техники безопасности.
В частности, используйте средства индивидуальной защиты
в установленном порядке.
1.4 Квалифицированный персонал
Под квалифицированным персоналом понимаются обученные
лица, имеющие практический опыт работы, знающие требования
соответствующих нормативных документов и правил техники
безопасности и допущенные ответственными за технику безопасности
на объекте к выполнению работ. Эти лица должны быть способны
определять и устранять опасные факторы.
Ниже приводятся инструкции по распаковке, монтажу и техническому
обслуживанию изделий FLOWSERVE. Пользователи и обслуживающий
персонал должны внимательно прочесть эту инструкцию перед
монтажом, вводом в эксплуатацию или выполнением любого
технического обслуживания.
1.5 Влияние конструктивных изменений
клапана и привода
В настоящем руководстве не могут быть рассмотрены все варианты
конструктивных изменений изделия и все возможные случаи
монтажа, эксплуатации и технического обслуживания.Это означает,
что приведенные инструкции адресуются квалифицированному
персоналу, занятому эксплуатацией изделия на объекте в соответствии
с его назначением. В случае неясностей и отсутствии необходимой
информации по изделию обращайтесь за уточнениями в ближайший
отдел сбыта FLOWSERVE.
1.6 Запасные части
Разрешается использование только фирменных запасных частей
FLOWSERVE. Компания FLOWSERVE не несет ответственности за
ущерб, обусловленный применением запасных частей и крепежных
изделий других изготовителей. Перед использованием изделий
FLOWSERVE, находившихся на длительном хранении, проверьте
их состояние (в первую очередь, уплотнительных материалов).
Противопожарная защита изделий FLOWSERVE обеспечивается
пользователем. Более подробную информацию можно найти в
разделе 4, ХРАНЕНИЕ И РАСПАКОВКА.

Принцип действия, 7 обслуживание и ремонт, 8 общие сведения
9 hart
- Изображение
- Текст
Руководство пользователя — Цифровые позиционеры серии Logix
®
420 FCD LGRUIM0106-06 – 12/13
4
1.7 Обслуживание и ремонт
Во избежание травм и повреждений оборудования строго соблюдайте
правила техники безопасности. Изменение конструкции позиционера,
применение запасных частей не заводского производства и
использование процедур обслуживания, которые не указаны в
настоящем руководстве, могут привести к ухудшению эксплуатационных
характеристик, создать опасность для персонала и прекратить действие
гарантииs.
Между приводом и клапаном находятся движущиеся детали. Во
избежание травм компания FLOWSERVE предусматривает защитное
ограждение, особенно при боковом расположении позиционера.
Соблюдайте особую осторожность, если ограждение снято для осмотра,
обслуживания или ремонта. После завершения работ установите
ограждение на место.
Ремонт позиционера Logix 420 сводится к замене его узлов и печатных
плат соответствующими новыми запасными частями производства
FLOWSERVE в соответствии с инструкциями, изложенными в настоящем
руководстве.
1
ПРЕДУПРЕЖДЕНИЕ: При возврате позиционера с целью
ремонта или обслуживания компания FLOWSERVE должна
получить от пользователя правку о том, что позиционер
полностью очищен от вредных веществ. Без такой справки
FLOWSERVE возвращаемые изделия не принимает(форму
справки можно получить в компании FLOWSERVE).
Помимо инструкций по эксплуатации и обязательных правил техники
безопасности, действующих в стране использования позционера,
должны соблюдаться общепринятые правила техники безопасности и
методы производства работ.
ПРИНЦИП ДЕЙСТВИЯ
1.8 Общие сведения
Цифровой позиционер Logix 420, управляемый аналоговым входным
сигналом 4-20 мА, поступающим по двухпроводной линии, использует
протокол HART для двухстороннего обмена данными. Входной сигнал
4 – 20 мА также используется для питания позиционера. Пусковой
ток должен составлять не менее 3,8 мА. Для установки параметров
позиционера можно использовать местный пользовательский
интерфейс, ручной коммуникатор и ПО DTM. Позиционер Logix
420 предназначен для управления прямоходными и поворотными
пневматическими приводами одностороннего действия.
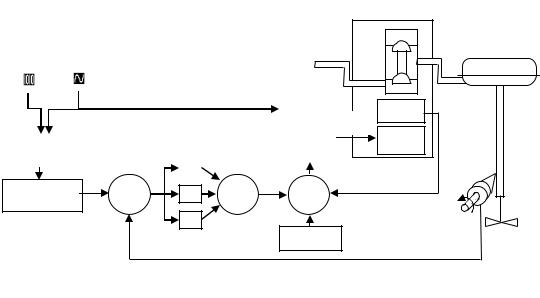
Цифровой позиционер Logix 420 представляет собой электронно-
пневматический автоматический регулятор с обратной связью. На рис. 1
показан позиционер Logix 420, установленный на прямоходном приводе
одностороннего действия с видом действия «воздух открывает».
1.9 HART
Для питания позиционера Logix 420 используется входной сигнал
4 – 20 мА, поступающий по двухпроводной схеме. Однако поскольку
в этом позиционере реализован обмен данными по протоколу HART,
возможно использование двух источников командного сигнала:
аналогового и цифрового. В аналоговом источнике командным является
входной сигнал 4 — 20 мА. При использовании цифрового источника
уровень входного сигнала 4 — 20 мА игнорируется (используется только
для питания) и командным является цифровой сигнал, передаваемый
по протоколу HART. Для доступа к источнику командного сигнала
используется ПО ValveSight, коммуникатор HART 375 или другое ПО
главного компьютера. Более подробную информацию можно найти в
разделе 11, КАНАЛ ОБМЕНА ДАННЫМИ ПО ПРОТОКОЛУ HART.
+
+
+
P
I
D
+
_
+
_
Командный
входной
цифровой
сигнал
Командный
входной
аналоговый
сигнал
(4 – 20 мА)
Питающий воздух
Командное реле одностороннего действия
Тарель-
чатый
клапан
Контур
отключения
управления
пьезоклапаном
Привод
Датчик
Холла
Пьезоклапан
Напряжение
пьезоклапана
Внутренний
контур
управления
золотниковым
клапаном
Выходной сигнал
внутреннего контура
Регулирующий
клапан
Обратная связь
по положению
Смещение
внутреннего
контура
Выходной
сигнал
в %%
Команда
управления
Преобразование по
выбранной характеристике,
программные ограничители
хода, герметичная отсечка
Командный
входной
сигнал
Рис. 1: Принцип действия позиционера Logix 420

10 определение положения, 11 входной сигнал и команда управления, 12 внешний контур
13 внутренний контур, 14 подробное описание работы позиционера, 15 смещение внутреннего контура
- Изображение
- Текст
5
Руководство пользователя — Цифровые позиционеры серии Logix
®
420 FCD LGRUIM0106-06 – 12/13
1.10 Определение положения
Как для аналогового, так и цифрового источника, за 0% принимается
закрытое положение клапана, а за 100% – открытое положение.
При использовании аналогового источника входной сигнал 4 — 20 мА
преобразуется в %% от хода. При калибровке контура определяются
сигналы, соответствующие 0% и 100%.
1.11 Входной сигнал и команда управления
Входной сигнал в %% проходит через блок преобразования
для определения положения в соответствии с используемой
характеристикой и ограничениями. Для этих целей используется ПО,
с помощью которого оператор может провести настройку по месту.
Блок преобразования может пропустить входной сигнал без обработки
(линейная характеристика) или выполнить преобразование входного
сигнала в соответствии с одной из заданных характеристик (включая
несколько равнопроцентных характеристик) или пользовательской
характеристикой, заданной по 21 паре координат. При работе в режиме
с линейной характеристикой входной сигнал проходит непосредственно
через алгоритм управления без изменения значения (преобразование
1:1). При работе в режиме с равнопроцентной характеристикой,
входной сигнал преобразуется по равнопроцентной характеристике
со стандартным диапазоном регулирования. Если введен в действие
режим работы с характеристикой пользователя, то в этом случае
входной сигнал преобразуется по пользовательской характеристике,
построенной по 21 паре координат, которые вводит оператор с помощью
ручного коммуникатор или ПО ValveSight. Два параметра, определяемые
пользователем: программируемые пределы (Soft Limits) и герметичная
отсечка (Tight Shutoff) могут влиять на данное положение. Команда,
используемая для перемещения штока в требуемое положение,
формируемая по входному сигналу с использованием какой-либо
характеристики и пределов, установленных пользователем, называется
командой управления.
1.12 Внешний контур
В Logix 420 применяется двухступенчатый алгоритм позиционирования
штока. Он включает внутренний контур, управляющий командным
реле, и внешний контур, управляющий перемещением штока. Датчик
положения штока используется для измерения его перемещения (см.
рис. 1). Команда управления сравнивается с сигналом по положению
штока. При наличии отклонения алгоритм управления передает
сигнал внутреннему контуру для перемещения реле в зависимости
от отклонения. Внутренний контур быстро изменяет положение
золотникового клапана в соответствии с поступившим сигналом.
Давление в приводе меняется, и шток начинает перемещаться. По мере
перемещения уменьшается разность между командой управления и
сигналом по положению штока. Перемещение продолжается до тех пор,
пока эта разность не станет равна нулю.
1.13 Внутренний контур
Внутренний контур управляет положением распределительного
клапана с помощью задающего преобразователя, который состоит из
термокомпенсированного датчика Холла и преобразователя давления
с задающим пьезоклапаном. Последний регулирует давление воздуха
под мембраной привода с помощью заслонки, на которой установлен
пьезоэлемент. Изгиб заслонки определяется напряжением на
пьезоэлементе, формируемом электронными схемами внутреннего
контура. При увеличении этого напряжения заслонка изгибается и
прикрывает сопло, что приводит к увеличению давления под мембраной.
При увеличении или уменьшении давления под мембраной тарельчатый
клапан перемещается, соответственно, вверх или вниз. Датчик Холла
формирует сигнал по положению тарельчатого клапана, который
поступает в электронные схемы внутреннего контура для управления.
1.14 Подробное описание работы позиционера
Приведенный ниже пример поможет лучше понять принцип
действия позиционера. Допустим, что позиционер имеет следующую
конфигурацию:
• Позиционер работает в режиме использования аналогового
источника входного сигнала.
• Функция «Пользовательская характеристика» отключена (поэтому
используется линейная характеристика).
• Опция «Программируемые пределы» отключена. Минимальное
положение герметичной отсечки не установлено.
• Положение клапана соответствует текущему входному сигналу
12 мА, т.е., отклонение равно нулю.
• Калибровка контура: 4 мА = командный сигнал 0%,
20 мА = командный сигнал 100%
• Трубная обвязка привода и конфигурация позиционера
соответствуют виду действия «воздух открывает».
При этих условия сигнал 12 мА соответствует командному сигналу 50%.
Функция «Пользовательская характеристика» отключена, и поэтому
командный входной сигнал передается на выход без изменений и
команда управления равна входному сигналу. Так как отклонение равно
нулю, то шток также находится в положении 50%. При этом тарельчатый
клапан будет находиться в среднем положении, при котором давления
и усилие пружины привода будут равны. Это положение обычно
называется нулевым или уравновешенным положением тарельчатого
клапана.
Предположим, что входной сигнал изменился от 12 до 16 мА.
Позиционер определяет, что этот сигнал соответствует положению
75%. При линейной характеристике команда управления становится
равной 75%. Отклонение, т.е. разность между командой управления
и положением штока равна 75% — 50% = +25%, где 50% – текущее
положение штока. При появлении положительного отклонения алгоритм
регулирования передает сигнал на перемещение тарельчатого
клапана вверх относительно текущего положения. При перемещении
тарельчатого клапана вверх воздух начинает подаваться в нижнюю
камеру привода. В результате создается разность давления,
перемещающая шток к заданному положению 75%. По мере движения
штока отклонение уменьшается. Алгоритм регулирования начинает
прикрывать тарельчатый клапан. Этот процесс продолжается пока
отклонение не станет равным нулю. В этот момент тарельчатый клапан
возвращается в нулевое или уравновешенное положение. Перемещение
штока прекращается. когда он достигает заданного положения.
1.15 Смещение внутреннего контура
Положение тарельчатого клапана, при котором усилия давления и
пружин уравновешиваются, в результате чего управляемый клапан
удерживается в постоянном положении, называется «смещением
внутреннего контура». Алгоритм управления использует это
значение в качестве начала отсчета для определения напряжения
управления пьезоклапаном. Этот параметр важен для правильного
управления клапаном. Его значение автоматически устанавливается и
оптимизируется при калибровке хода.

2 технические характеристики, 1 входной сигнал, 2 питающий воздух
3 физические характеристики, 4 пневматический выходной сигнал, 5 угол поворота вала, 6 температура, 7 эксплуатационные характеристики позици
- Изображение
- Текст
Руководство пользователя — Цифровые позиционеры серии Logix
®
420 FCD LGRUIM0106-06 – 12/13
6
2 ТЕХНИЧЕСКИЕ
ХАРАКТЕРИСТИКИ
2.1 Входной сигнал
Таблица 1: Входной сигнал
Электропитание
Двухпроводная схема, 4-20 мА,
напряжение на клеммах 10,0 В пост. тока
Диапазон изменения входного
сигнала
4 — 20 мА (HART)
Напряжение источника питания
10,0 В пост. тока при 20 мА
Эффективное сопротивление
Типичное значение 500 Ом при 20 мА
Минимальный требуемый
оперативный ток
3,8 мА
Прерывание сигнала без учета
времени повторного пуска (после
подачи питания на позиционер в
течение по крайней мере одной
минуты)
80 мс
Максимальный ток отключения
3,6 мА
Обмен данными
Протокол HART
2.2 Питающий воздух
Таблица 2: Питающий воздух
Минимальное давление на входе
1,5 бар (22 фунт/кв.дюйм)
Максимальное давление на входе Реле одностороннего действия –
6 бар (87 фунт/кв.дюйм)
Качество питающего воздуха
Питающий воздух не должен содержать
влаги, нефтепродуктов и пыли в
соответствии со стандартом ISA 7.0.01
(температура точки росы не менее, чем
на 18°F ниже температуры окружающей
среды, тонкость фильтрации воздуха
– 5 мкм (рекомендуется – 1 микрон),
содержание масла – не более 1 ppm).
Относительная влажность воздуха
при эксплуатации
0 — 100% без конденсации
Допустимые газы для
использования в качестве
рабочей среды привода
Воздух, очищенный от серы природный
газ, азот и CO
2
.
Использование сернистого природного
газа не допускается.
Расход воздуха
0,069 нм
3
/ч при 1,5 бар
(0,041 ст. фут
3
/мин при 22 фунт/кв.дюйм)
0,082 нм
3
/ч при 4,1 бар
(0,050 ст. фут
3
/мин при 60 фунт/кв.дюйм)
2.3 Физические характеристики
Таблица 3: Физические характеристики
Размеры приводятся в разделе 15, ПОЗИЦИОНЕР.
Материал корпуса
Литой алюминиевый
с порошковой покраской
EN AC-AlSi12(Fe)
Мягкие материалы
Фторсиликон
Масса позиционера без оснастки
С ЖК дисплеем и стеклянной крышкой
2,70 кг (5,95 фунт)
Со сплошной крышкой 3,11 кг (6.85 фунт)
2.4 Пневматический выходной сигнал
Таблица 4: Пневматический выходной сигнал
Диапазон изменения давления
выходного сигнала
0 — 100% от давления
питающего воздуха
Пропускная способность
по воздуху
Пневмораспределитель одностороннего
действия – 9,06 нм
3
/ч при 1,5 бар
(5,33 ст. фут
3
/мин при 22 фунт/кв.дюйм)
20,8 нм
3
/ч при 4,1 бар
(12,2 ст. фут
3
/мин при 60 фунт/кв.дюйм)
2.5 Угол поворота вала
Таблица 5: Угол поворота вала
Угол поворота вала обратной
связи
От 15° до 90°
Для прямоходных приводов
рекомендуется 45°
2.6 Температура
Таблица 6: Температура
Рабочая температура*
-52…85°C (-61.6…185°F)
Транспортировка и хранение
-52…85°C (-61.6…185°F)
*При низких температурах возможно ухудшение эксплуатационных характеристик.
2.7 Эксплуатационные характеристики
позиционера
Таблица 7: Эксплуатационные характеристики позиционера
Не хуже следующих показателей, полученных при использовании с приводом
Mark I с площадью мембраны 25 дюйм
2
согласно стандарту ISA 75.13.
Разрешающая способность
< 0,25%
Линейность
+/-1,25%
Воспроизводимость
< 0,25%
Гистерезис
< 1,0%
Зона нечувствительности
< 0,3%
Чувствительность
< 0,25%
Стабильность
< 0,4%
Длительный дрейф
< 0,5%
Влияние изменения давления
питающего воздуха
< 0,2%
2.8 Требования для использования
ПО ValveSight DTM
Таблица 8: Требования для использования ПО ValveSight DTM
Компьютер
Процессор Pentium, ОС Windows 95, 98,
NT, 2000, XP, ОЗУ 32 Мб (рекомендуется
64 MB), 30 МБ свободного пространства
на жестком диске, привод CD-ROM
Порты
От 1 до 8 (возможен обмена данными
через последовательный порт, разъемы
PCMCIA и USB)
HART модем
RS-232, Плата PCMCIA или USB
Фильтр HART
Может потребоваться при использовании
определенной аппаратуры РСУ
HART MUX
MTL 4840/ELCON 2700

7
Руководство пользователя — Цифровые позиционеры серии Logix
®
420 FCD LGRUIM0106-06 – 12/13
3 СЕРТИФИКАЦИЯ ДЛЯ ОПАСНЫХ ЗОН
Таблица 9 Сертификация позиционера Logix 420 для использования в опасных зонах
ATEX
Взрыврзащищенное / огнестойкое исполнение
FM13ATEX0097X
II 2 G
Ex d IIB+H2 Gb T4/T6
T4 Tокр.среды = -52°C ≤ Tокр.среды ≤+85°C
T6 Tокр.среды = -52°C ≤ Tокр.среды ≤+45°C
IP 66
Искробезопасное исполнение
FM12ATEX0009X
II 1 G
Ex ia IIC Ga T4/T6
T4 Tокр.среды = -20°C < Tокр.среды < +85°C
T6 Tокр.среды = -52°C < Tокр.среды < +45°C
IP 66
Характеристики взрывозащиты
Вход 4 – 20 мА
Ui (В пост. тока)=
30
Ii (мА)=
100
Pi (мВт)=
800
Ci (мкФ)=
0
Li (мкГн)=
47
Примечание: См. установочный чертеж № 291780
Северная Америка (cFMus)
Взрыврзащищенное исполнение
Класс I, раздел 1, газовые группы B,C,D
Класс I, Зона 1, AEx d IIB+H2 T4/T6 (США)
Класс I, Зона 1, Ex d IIB +H2 T4/T6 (Канада)
T4 Tокр.среды = -52°C ≤ Tокр.среды ≤+85°C
T6 Tокр.среды = -52°C ≤ Tокр.среды ≤+45°C
Искробезопасное исполнение
Класс I, раздел 1, газовые группы A,B,C,D
Класс I, Зона 0, AExia IIC (США)
Класс I, Зона 0, Ex ia IIC (Канада)
T4 Tокр.среды = -20°C < Tокр.среды < +85°C
T6 Tокр.среды = -52°C < Tокр.среды < +45°C
Тип 4X
Характеристики взрывозащиты
Вход 4 – 20 мА
Ui (В пост. тока)=
30
Ii (мА)=
100
Pi (мВт)=
800
Ci (мкФ)=
0
Li (мкГн)=
47
Примечание: См. установочный чертеж № 291780
IECEx
Взрыврзащищенное / огнестойкое исполнение
FMG 13.0038X
II 2 G
Ex d IIB+H2 Gb T4/T6
T4 Tокр.среды = -52°C ≤ Tокр.среды ≤+85°C
T6 Tокр.среды = -52°C ≤ Tокр.среды ≤+45°C
IP 66
Искробезопасное исполнение
FMG 12.0001X
Ex ia IIC Ga T4/T6
T4 Tокр.среды = -20°C < Tокр.среды < +85°C
T6 Tокр.среды = -52°C < Tокр.среды < +45°C
IP 66
Характеристики взрывозащиты
Вход 4 – 20 мА
Ui (В пост. тока)=
30
Ii (мА)=
100
Pi (мВт)=
800
Ci (мкФ)=
0
Li (мкГн)=
47
Примечание: См. установочный чертеж № 291780
0
ВНИМАНИЕ!
• Для обеспечения требуемой степени защиты крышки должны быть
правильно установлены на место.
Специальные требования для обеспечения безопасной эксплуатации:
• Оборудование устанавливается так, чтобы исключить опасность ударов и
трения о другие металлические поверхности.
• Для предотвращения статического разряда вытирайте позиционер только
влажной тканью
• Для искробезопасной установки позиционер должен быть подключен к
искробезопасному оборудованию с соответствующими номинальными
характеристиками и должен устанавливаться в соответствии с
действующими нормами на установку оборудования с видом взрывозащиты
«искробезопасная цепь».
• Замена компонентов может привести к прекращению действия сертификата
соответствия взрывозащиты «искробезопасная цепь».
• При повышенных температурах используйте кабель с изоляцией,
рассчитанной на эту температуру.
• Обратитесь к представителю компании Flowserve за информацией о
пламяпреграждающих путях.

4 хранение и распаковка, 1 хранение, 2 распаковка
3 проверка перед установкой
- Изображение
- Текст
Руководство пользователя — Цифровые позиционеры серии Logix
®
420 FCD LGRUIM0106-06 – 12/13
8
4 ХРАНЕНИЕ И РАСПАКОВКА
4.1 Хранение
Комплектные регулирующие клапаны FLOWSERVE (состоящие из
регулирующего клапана и его КИПиА) обычно надежно защищены
от коррозии. Тем не менее, изделия FLOWSERVE должны храниться
в чистом сухом месте, например, в закрытых помещениях, которые
защищены от воздействия окружающей среды. Отопление помещения
не требуется. Комплектные регулирующие клапаны должны храниться
на поддонах, а не на полу. Место хранения также должно быть чистым
и сухим, защищенным от пыли и т.п. Рабочие поверхности фланцев
и штуцеры позиционера закрываются пластиковыми крышками,
защищающими от попадания посторонних материалов в корпус клапана.
Эти крышки снимаются только непосредственно перед установкой
клапана или позиционера в систему.
Если изделия FLOWSERVE (в первую очередь, уплотнительные
материалы) хранились в течение длительного времени, проверьте их
перед использованием для выявления коррозии и признаков старения.
Противопожарная защита изделий FLOWSERVE предусматривается
конечным пользователем.
4.2 Распаковка
При распаковке клапана и/или позиционера Logix 420 проверьте их
комплектность по упаковочному листу. Листы с описанием системы и
дополнительных принадлежностей, вложены в каждый транспортный
контейнер.
Немедленно сообщите о повреждениях, полученных при перевозке,
транспортной компании. О любых возникающих проблемах сообщите в
ближайшее представительство FLOWSERVE.
4.3 Проверка перед установкой
Перед установкой позиционера убедитесь в том, что вал не имеет
повреждений, а все заглушки и крышки находятся на месте. Заглушки
защищают внутрикорпусные детали позиционера от повреждений в
результате попадания грязи и влаги. Загрязненные части позиционера
очистите мягкой влажной тканью. Для обеспечения доступа некоторые
узлы позиционера можно снять. См. раздел 13, ТЕХНИЧЕСКОЕ
ОБСЛУЖИВАНИЕ И РЕМОНТ. Проверьте патрубки, чтобы убедиться в
отсутсвии инородных частиц. Сетки в штуцерах можно снять с помощью
отвертки через отверстия для доступа к внутренним каналам.

9
Руководство пользователя — Цифровые позиционеры серии Logix
®
420 FCD LGRUIM0106-06 – 12/13
5 МОНТАЖ И УСТАНОВКА
5.1 Непосредственная установка на клапанах
Valtek GS и Flow Top
См. рис. 2: Установка на клапанах Valtek GS и Flow Top
1 Соедините штифт кулисы с кулисой. Закрепите кулису на штоке
клапана двумя винтами. См. Таблицу 10: Характеристики кулисы
и штифта кулисы клапанов FlowTop and GS для надлежащей
ориентации кулисы и штифта кулисы.
2 Установите уплотнительное кольцо привода.
3 Убедитесь в том, что резьбовая заглушка 1/16 NPT для штуцера
управления (если он имеется) удалена.
4 Установите позиционер на привод. При этом штифт кулисы должен
войти в паз рычага. Отрегулируйте положение рычага.
ПРИМЕЧАНИЕ: Для облегчения регулировки вал обратной связи
имеет зажимной механизм, позволяющий валу переходить за крайние
положения при вращении. Просто переместите рычаг в требуемое
положение.
5 Винтами закрепите позиционер на приводе.
6. Подключите регулируемы источник питающего воздуха к
соответствующему штуцеру коллектора. См. раздел 6 ТРУБНАЯ
ПРОВОДКА
7 Подключите питание к клеммам 4-20 мА. См. раздел 7,
ЭЛЕКТРИЧЕСКИЕ СОЕДИНЕНИЯ.
8 Снимите главную крышку и найдите DIP-переключатели и кнопку
QUICK-CAL/ACCEPT.
9 Установите DIP-переключатели в соответствии с табличкой на
крышке главной печатной платы. См. раздел 8, ПУСК.
10 Нажмите на кнопку QUICK-CAL/ACCEPT на 3 – 4 секунды или пока
механизм позиционера не начнет перемещаться. После этого
позиционер выполнит калибровку хода.
1
ПРЕДУПРЕЖДЕНИЕ: Выполнение калибровки хода вызовет полное
перемещение штока клапана в обоих направлениях.
11 Если калибровка выполнена успешно, то светодиодные индикаторы
будут мигать в последовательности ЗЗЗЗ или ЗЗЗЖ. Затем клапан
перейдет в режим регулирования.
12 При неудачно выполненной калибровке, на что указывет мигание
индикаторов в последовательности КЗЗЖ, повторите калибровку.
Если калибровку выполнить не удалось, то это свидетельствует
о переходе вала обратной связи за крайние положения.
Отрегулируйте положение рычага так, чтобы он не доходил до
крайних положений на позиционере. Поверните вал обратной
связи так, чтобы обеспечить его свободный ход во всем диапазоне
перемещения привода. Другое решение заключается в продолжении
калибровки. При каждой попытке калибровки устанавливаются
допустимые крайние положения, поэтому в итоге калибровка будет
выполнена успешно.
1
ПРЕДУПРЕЖДЕНИЕ: Не забудьте отключить питающий воздух
перед корректировкой положения рычага.
ПРИМЕЧАНИЕ: При правильном монтаже рычаг должен
располагаться горизонтально, когда ход затвора равен 50%, и
поворачиваться на угол ±30° относительно горизонтали при
перемещении клапана в крайние положения.
ПРИМЕЧАНИЕ: TДля устранения любой нелинейности вследствие
геометрии рычажного механизма используйте функцию Linearization
(Линеаризация) на странице Custom Characterization (Пользовательская
характеристика) ПО DTM.
Рис. 2: Установка на клапанах Valtek GS и FlowTop
Винты крепления
на приводе
Уплотнительное
кольцо привода
Штифт кулисы
Кулиса
Винты крепления кулисы

Руководство пользователя — Цифровые позиционеры серии Logix
®
420 FCD LGRUIM0106-06 – 12/13
10
Таблица 10: Характеристики кулисы и штифта кулисы клапанов
FlowTop и GS
Привод
Ход (мм)
Ориентация кулисы и
штифта кулисы
127 / 252
10
127 / 252
20
502
20 или 40
5.2 Присоединение к клапанам по стандарту
NAMUR
1 Прикрепите 4 винтами монтажную плиту к позиционеру.
2 Поверните вал обратной связи так, чтобы он совместился с
соединительной втулкой привода.
ПРИМЕЧАНИЕ: Для облегчения регулировки вал обратной связи
имеет зажимной механизм, позволяющий валу переходить за крайние
положения при вращении.
3 Закрепите позиционер на приводе, используя шайбы и гайки.
4 Подключите регулируемый источник воздуха к соответствующему
штуцеру коллектора. См. раздел 6, ТРУБНАЯ ПРОВОДКА
5 Подключите питание к клеммам 4 – 20 мА. См. раздел 7,
ЭЛЕКТРИЧЕСКИЕ СОЕДИНЕНИЯ
6 Снимите главную крышку и найдите DIP-переключатели и кнопку
QUICK-CAL/ACCEPT.
7 Установите DIP-переключатели в соответствии с табличкой на
крышке главной печатной платы. См. раздел 8, ПУСК
8 Нажмите на кнопку QUICK-CAL/ACCEPT на 3 – 4 секунды или пока
механизм позиционера не начнет перемещаться. После этого
позиционер выполнит калибровку хода.
9 Если калибровка выполнена успешно, то светодиодные индикаторы
будут мигать в последовательности ЗЗЗЗ или ЗЗЗЖ. Затем клапан
перейдет в режим регулирования.
10 При неудачно выполненной калибровке, на что указывет мигание
индикаторов в последовательности КЗЗЖ, повторите калибровку.
Если ошибка сохраняется, отсоедините электропитание
позиционера, отсоедините линию подвода питающего воздуха и
снимите позиционер с привода. Поверните вал обратной связи
так, чтобы обеспечить его свободный ход во всем диапазоне
перемещения привода. Другое решение заключается в продолжении
калибровки. При каждой попытке калибровки устанавливаются
допустимые крайние положения, поэтому в итоге калибровка будет
выполнена успешно.
1
ПРЕДУПРЕЖДЕНИЕ: Не забудьте отключить питающий воздух
перед корректировкой положения кулисы.
Рис. 3: Кронштейн по стандарту NAMUR
Рис. 4: Блок AutoMax

Комментарии

Руководство пользователя — Цифровые позиционеры серии Logix
®
420 FCD LGRUIM0106-06 – 12/13
2
Оглавление
Инструкции по быстрому пуску 15
1 ОБЩИЕ СВЕДЕНИЯ
3
1.1 Пользование данным документом
3
1.2 Термины, связанные с техникой безопасности
3
1.3 Спецодежда
3
1.4 Квалифицированный персонал
3
1.5 Влияние конструктивных изменений клапана и привода 3
1.6 Запасные части
3
1.7 Обслуживание и ремонт
3
1.8 Общие сведения
4
1.9 HART
4
1.10 Определение положения
4
1.11 Входной сигнал и команда управления
4
1.12 Внешний контур
5
1.13 Внутренний контур
5
1.14 Подробное описание работы позиционера
5
1.15 IСмещение внутреннего контура
5
2 ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
6
2.1 Входной сигнал
6
2.2 Питающий воздух
6
2.3 Физические характеристики
6
2.4 Пневматический выходной сигнал
6
2.5 Угол поворота вала
6
2.6 Температура
6
2.7 Эксплуатационные характеристики позиционера
6
2.8 Требования для использования ПО ValveSight DTM
6
3 СЕРТИФИКАЦИЯ ДЛЯ ОПАСНЫХ ЗОН
7
4 ХРАНЕНИЕ И РАСПАКОВКА
8
4.1 Хранение
8
4.2 Распаковка
8
4.3 Проверка перед установкой
8
5 МОНТАЖ И УСТАНОВКА
9
5.1 Непосредственная установка на клапанах
Valtek GS и Flow Top
9
5.2 Присоединение к клапанам по стандарту NAMUR
10
6 ТРУБНАЯ ПРОВОДКА
11
6.1 Определение вида действия
11
6.2 Подключение питающего воздуха
11
6.3 Вентилируемое исполнение
11
6.4 Продувка
11
7 ЭЛЕКТРИЧЕСКИЕ СОЕДИНЕНИЯ
12
7.1 Клеммы для подключения
12
7.2 Подключение командного входного сигнала (4-20 мА) 12
7.3 Подключение для эксплуатации позционера с видом
взрывозащиты «искробезопасная» цепь
14
8 ПУСК
15
8.1 Инструкции по быстрому пуску
15
8.2 Местный пользовательский интерфейс
15
8.3 Установка переключателей параметров конфигурации 15
8.4 Калибровка хода
16
9 ФУНКЦИИ ПОЗИЦИОНЕРА
(исполняемые без использования дисплея)
18
9.1 Оперативная настройка
(регулировка коэффициента усиления)
18
9.2 Местное управление клапаном
18
9.3 Восстановление исходного состояния
источника командного сигнала
18
9.4 Восстановление заводских настроек
19
9.5 Проверка номера версии
18
10 ФУНКЦИИ ПОЗИЦИОНЕРА (ЖК дисплей)
19
10.1 Главный экран
19
10.2 Основное меню
21
10.3 Разделы меню
22
11 ОБМЕН ДАННЫМИ ПО КАНАЛУ HART
27
11.1 ValveSight DTM
27
11.2 Ручной коммуникатор HART 475
27
11.3 Режим пакетной передачи
27
11.4 CИзменение версии протокола HART
27
12 ТРЕБОВАНИЯ К ПОЛНОТЕ БЕЗОПАСНОСТИ
28
12.1 Отказобезопасное состояние
28
12.2 Функция безопасности
28
12.3 Время перехода в отказобезопасное состояние
28
12.4 Установка
28
12.5 Требуемые параметры конфигурации
28
12.6 Максимальный достижимый уровень
полноты безопасности
28
12.7 Показатели надежности
28
12.8 Ресурсные характеристики
29
12.9 Проверочные испытания
29
12.10 Техническое обслуживание
29
12.11 Ремонты и замены
29
12.12 Требования к подготовке персонала
29
13 ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ И РЕМОНТ
30
13.1 Плановое обслуживание
30
13.2 Требуемые инструменты и оборудование
30
13.3 Замена главной платы
30
14 ПОИСК И УСТРАНЕНИЕ НЕИСПРАВНОСТЕЙ
31
14.1 Указания по поиску и устранению неисправностей
31
14.2 Указатель кодов состояния
32
14.3 Описание кодов состояния
33
14.4 Сопровождение эксплуатации компанией Flowserve
39
15 РАЗМЕРЫ ПОЗИЦИОНЕРА
40
15.1 Размеры позиционера
40
16 ИНФОРМАЦИЯ ДЛЯ ЗАКАЗА
41
16.1 Позиционер
41
16.2 Комплекты запасных частей
41
16.3 Монтажные комплекты
41
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
42
 Loading…
Loading…

User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
|
USER INSTRUCTIONS |
||
|
Installation |
||
|
Logix ® 420 |
Operation |
|
|
Maintenance |
||
|
Digital Positioner |
||
|
Safety Manual |
||
|
FCD LGENIM0106-0612/13 |
||

User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
CONTENTS
Quick Start Instructions 15
|
1 |
GENERAL INFORMATION …………………………… |
3 |
|
1.1 |
USING THIS DOCUMENT…………………………………………………… |
3 |
|
1.2 |
TERMS CONCERNING SAFETY ……………………………………………… |
3 |
|
1.3 |
PROTECTIVE CLOTHING ……………………………………………………. |
3 |
|
1.4 |
QUALIFIED PERSONNEL ……………………………………………………. |
3 |
|
1.5 |
VALVE AND ACTUATOR VARIATIONS……………………………………… |
3 |
|
1.6 |
SPARE PARTS ………………………………………………………………. |
3 |
|
1.7 |
SERVICE / REPAIR………………………………………………………….. |
3 |
|
1.8 |
BASIC OPERATION …………………………………………………………. |
4 |
|
1.9 |
HART………………………………………………………………………. |
4 |
|
1.10 |
POSITION DEFINITION……………………………………………………… |
4 |
|
1.11 |
COMMAND INPUT AND FINAL COMMAND……………………………….. |
4 |
|
1.12 |
OUTER LOOP……………………………………………………………….. |
5 |
|
1.13 |
INNER LOOP………………………………………………………………… |
5 |
|
1.14 |
DETAILED SEQUENCE OF POSITIONER OPERATIONS ……………………… |
5 |
|
1.15 |
INNER LOOP OFFSET……………………………………………………….. |
5 |
|
2 |
SPECIFICATIONS ……………………………………….. |
6 |
|
2.1 |
INPUT SIGNAL ……………………………………………………………… |
6 |
|
2.2 |
AIR SUPPLY ………………………………………………………………… |
6 |
|
2.3 |
PHYSICAL SPECIFICATIONS…………………………………………………. |
6 |
|
2.4 |
PNEUMATIC OUTPUT………………………………………………………. |
6 |
|
2.5 |
STROKE OUTPUT …………………………………………………………… |
6 |
|
2.6 |
TEMPERATURE……………………………………………………………… |
6 |
|
2.7 |
POSITIONER PERFORMANCE CHARACTERISTICS ………………………….. |
6 |
|
2.8 |
VALVESIGHT DTM SOFTWARE SPECIFICATIONS…………………………. |
6 |
|
3 |
HAZARDOUS AREA CERTIFICATIONS………… |
7 |
|
4 |
STORAGE AND UNPACKING………………………. |
8 |
|
4.1 |
STORAGE …………………………………………………………………… |
8 |
|
4.2 |
UNPACKING ………………………………………………………………… |
8 |
|
4.3 |
PRE—INSTALLATION INSPECTION…………………………………………… |
8 |
|
5 |
MOUNTING AND INSTALLATION ………………… |
9 |
|
5.1 |
DIRECT MOUNTING TO VALTEK GS AND FLOWTOP …………………….. |
9 |
|
5.2 |
MOUNTING TO NAMUR VALVES ……………………………………… |
10 |
|
6 |
TUBING ……………………………………………………. |
11 |
|
6.1 |
DETERMINE AIR ACTION ………………………………………………… |
11 |
|
6.2 |
CONNECT SUPPLY PORT …………………………………………………. |
11 |
|
6.3 |
VENTED DESIGN………………………………………………………….. |
11 |
|
6.4 |
PURGING …………………………………………………………………. |
11 |
|
7 |
ELECTRICAL CONNECTIONS……………………. |
12 |
|
7.1 |
ELECTRICAL TERMINALS………………………………………………….. |
12 |
|
7.2 |
COMMAND INPUT (4-20 MA) CONNECTION ………………………….. |
12 |
|
7.3 |
CONNECTIONS FOR INTRINSICALLY SAFE OPERATION ………………….. |
14 |
|
8 |
STARTUP …………………………………………………. |
15 |
|
8.1 |
QUICK START INSTRUCTIONS ……………………………………………. |
15 |
|
8.2 |
LOCAL USER INTERFACE OVERVIEW …………………………………….. |
15 |
|
8.3 |
CONFIGURATION SWITCH SETTINGS…………………………………….. |
15 |
|
8.4 |
STROKE CALIBRATION ……………………………………………………. |
16 |
|
9 |
POSITIONER FUNCTIONS (NO DISPLAY |
|
|
REQUIRED) ………………………………………………. |
18 |
|
|
9.1 |
LIVE MANUAL TUNING (ADJUSTING THE GAIN) ……………………….. |
18 |
|
9.2 |
LOCAL CONTROL OF VALVE POSITION ………………………………….. |
18 |
|
9.3 |
COMMAND SOURCE RESET ……………………………………………… |
18 |
|
9.4 |
FACTORY RESET ………………………………………………………….. |
18 |
|
9.5 |
VIEWING VERSION NUMBERS …………………………………………… |
19 |
|
10 POSITIONER FUNCTIONS (LCD DISPLAY)…. |
19 |
|
|
10.1 |
MAIN DISPLAY VIEW…………………………………………………….. |
19 |
|
10.2 |
MENU OVERVIEW ……………………………………………………….. |
21 |
|
10.3 |
MENU FEATURES ………………………………………………………… |
22 |
|
11 |
HART COMMUNICATION …………………………… |
27 |
|
11.1 |
VALVESIGHT DTM ………………………………………………………. |
27 |
|
11.2 |
HART 475 HANDHELD COMMUNICATOR……………………………… |
27 |
|
11.3 |
BURST MODE…………………………………………………………….. |
27 |
|
11.4 |
CHANGING HART VERSIONS……………………………………………. |
27 |
|
12 REQUIREMENTS FOR SAFETY INTEGRITY .. |
28 |
|
|
12.1 |
FAIL SAFE STATE …………………………………………………………. |
28 |
|
12.2 |
SAFETY FUNCTION ……………………………………………………….. |
28 |
|
12.3 |
FAIL SAFE STATE RESPONSE TIME ………………………………………. |
28 |
|
12.4 |
INSTALLATION ……………………………………………………………. |
28 |
|
12.5 |
REQUIRED CONFIGURATION SETTINGS………………………………….. |
28 |
|
12.6 |
MAXIMUM ACHIEVABLE SIL…………………………………………….. |
28 |
|
12.7 |
RELIABILITY DATA ………………………………………………………… |
28 |
|
12.8 |
LIFETIME LIMITS ………………………………………………………….. |
28 |
|
12.9 |
PROOF TESTING ………………………………………………………….. |
29 |
|
12.10 |
MAINTENANCE …………………………………………………………… |
29 |
|
12.11 |
REPAIR AND REPLACEMENT ……………………………………………… |
29 |
|
12.12 |
TRAINING REQUIREMENTS ………………………………………………. |
29 |
|
13 |
MAINTENANCE AND REPAIR ……………………. |
30 |
|
13.1 |
SCHEDULED MAINTAINANCE ……………………………………………. |
30 |
|
13.2 |
REQUIRED TOOLS AND EQUIPMENT …………………………………….. |
30 |
|
13.3 |
REPLACING A MAIN BOARD …………………………………………….. |
30 |
|
14 |
TROUBLESHOOTING ………………………………… |
31 |
|
14.1 |
TROUBLESHOOTING GUIDE ……………………………………………… |
31 |
|
14.2 |
STATUS CODE INDEX …………………………………………………….. |
32 |
|
14.3 |
STATUS CODE DESCRIPTIONS ……………………………………………. |
33 |
|
14.4 |
HELP FROM FLOWSERVE ………………………………………………… |
39 |
|
15 |
POSITIONER DIMENSIONS………………………… |
40 |
|
15.1 |
POSITIONER DIMENSIONS ……………………………………………….. |
40 |
|
16 |
HOW TO ORDER……………………………………….. |
41 |
|
16.1 |
POSITIONERS……………………………………………………………… |
41 |
|
16.2 |
SPARE PARTS KITS ……………………………………………………….. |
41 |
|
16.3 |
MOUNTING KITS …………………………………………………………. |
41 |
|
INDEX………………………………………………………………… |
42 |
User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
1 GENERAL INFORMATION
1.1 Using This Document
Product users and maintenance personnel should thoroughly review this manual prior to installing, operating, or performing any maintenance on the positioner.
The following instructions are designed to assist in unpacking, installing and performing maintenance as required on Logix® 420 positioners. .
Separate Flow Control Products User Instructions cover the valve, actuator, or portions of the system and other accessories. Refer to the appropriate instructions when this information is needed. In most cases FLOWSERVE valves, actuators and accessories are designed for specific applications with regard to medium, pressure and temperature. For this reason they should not be used in other applications without first contacting the manufacturer.
To avoid possible injury to personnel or damage to positioner parts, DANGER and CAUTION notes must be strictly followed. Modifying this product, substituting non-factory parts or using maintenance procedures other than outlined could drastically affect performance and be hazardous to personnel and equipment, and may void existing warranties.
1.2 Terms Concerning Safety
The safety terms DANGER, CAUTION and NOTE are used in these instructions to highlight particular dangers and/or to provide additional information on aspects that may not be readily apparent.
NOTE: Indicates and provides additional technical information, which may not be very obvious even to qualified personnel.
 CAUTION: Indicates that minor personal injury and/or property damage can occur if proper precautions are not taken.
CAUTION: Indicates that minor personal injury and/or property damage can occur if proper precautions are not taken.
DANGER: Indicates that death, severe personal injury and/or substantial property damage can occur if proper precautions are not taken.
Compliance with other, not particularly emphasized notes, with regard to assembly, operation and maintenance and technical documentation (e.g., in the operating instruction, product documentation or on the product itself) is essential in order to avoid faults, which in themselves might directly or indirectly cause severe personal injury or property damage.
FLOWSERVE positioners use high pressure gas to operate. Use eye protection when working around pressurized equipment. Follow proper procedures for working with natural gas if it is used.
DANGER: Standard industry safety practices must be adhered to when working on this or any process control product. Specifically, personal protective equipment must be used as warranted.
1.4 Qualified Personnel
Qualified personnel are people who, on account of their training, experience, instruction and their knowledge of relevant standards, specifications, accident prevention regulations and operating conditions, have been authorized by those responsible for the safety of the plant to perform the necessary work and who can recognize and avoid possible dangers.
In unpacking, installing and performing maintenance as required on FLOWSERVE products, product users and maintenance personnel should thoroughly review this manual prior to installing, operating or performing any maintenance.
1.5 Valve and Actuator Variations
These instructions cannot claim to cover all details of all possible product variations, nor can they provide information for every possible example of installation, operation or maintenance. This means that the instructions normally include only the directions to be followed by qualified personal where the product is being used for its defined purpose. If there are any uncertainties in this respect particularly in the event of missing product-related information, clarification must be obtained via the appropriate Flowserve sales office.
1.6 Spare Parts
Use only FLOWSERVE original spare parts. FLOWSERVE cannot accept responsibility for any damages that occur from using spare parts or fastening materials from other manufactures. If FLOWSERVE products (especially sealing materials) have been in storage for longer periods check these for corrosion or deterioration before using these products. See section 4 STORAGE AND UNPACKING more information.
1.7 Service / Repair
To avoid possible injury to personnel or damage to products, safety terms must be strictly adhered to. Modifying this product, substituting non-factory parts, or using maintenance procedures other than outlined in this instruction could drastically affect performance and be hazardous to personnel and equipment, and may void existing warranties.
1.3 Protective Clothing
Between actuator and valve there are moving parts. To avoid injury FLOWSERVE provides pinch-point-protection in the
User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
form of cover plates, especially where side-mounted positioners are fitted. If these plates are removed for inspection, service or repair special attention is required. After completing work the cover plates must be refitted.
Logix 420 positioner repair is limited to the replacement of sub-assemblies and circuit boards with FLOWSERVEmanufactured replacements as outlined in this manual.
DANGER: Substitution of with non-factory positioner components may impair intrinsic safety.
 CAUTION: Before products are returned to FLOWSERVE for repair or service, FLOWSERVE must be provided with a certificate which confirms that the product has been decontaminated and is clean. FLOWSERVE will not accept deliveries if a certificate has not been provided (a form can be obtained from FLOWSERVE).
CAUTION: Before products are returned to FLOWSERVE for repair or service, FLOWSERVE must be provided with a certificate which confirms that the product has been decontaminated and is clean. FLOWSERVE will not accept deliveries if a certificate has not been provided (a form can be obtained from FLOWSERVE).
Apart from the operating instructions and the obligatory accident prevention directives valid in the country of use, all recognized regulations for safety and good engineering practices must be followed.
PRINCIPLES OF OPERATION
1.8 Basic Operation
The Logix 420 digital positioner is a two-wire 4-20 mA input digital valve positioner which uses the HART protocol to allow two-way remote communications. The positioner is completely powered by the 4-20 mA input signal. Start-up current must be at least 3.8 mA. The positioner is configurable through the local user interface, hand-held or DTM. The Logix 420 positioner can control single-acting pneumatic actuators with linear or rotary mountings.
The Logix 420 digital positioner is an electronic and pneumatic closed-loop feedback instrument. Figure 1 shows a schematic of a Logix 420 positioner installed on a singleacting linear actuator for air-to-open action.
1.9 HART
The Logix 420 receives power from the two-wire, 4-20 mA input signal. However, since this positioner utilizes HART communications, two sources can be used for the command signal: Analog and Digital. In Analog source, the 4-20 mA signal is used for the command source. In Digital source, the level of the input 4-20 mA signal is ignored (used only for power) and a digital signal, sent via the HART communication protocol, is used as the command source. The command source can be accessed with ValveSight software, the HART 375 communicator, or other host software. See section 11 HART COMMUNICATION HART COMMUNICATION for more information.
1.10 Position Definition
Whether in Analog or Digital Source, The position at 0% is always defined as the valve in a closed position and 100% is always defined as the valve in an open position. In Analog Source, the 4-20 mA signal is converted to a position (in percent). During loop calibration, the signals corresponding to 0% and 100% are defined.
1.11 Command Input and Final Command
The Command Input signal (in percent) passes through a characterization/limits modifier block. This function is done in software, which allows for in-the-field customer adjustment. The characterization block can apply no adjustment (Linear),
Single Acting
Pilot Relay
|
Digital |
Analog |
||||||||||
|
Command |
|||||||||||
|
Command |
|||||||||||
|
Input |
|||||||||||
|
(4-20 mA) |
Air Supply |
||||||||||
|
Piezo Kill |
|||||||||||
|
Circuit |
|||||||||||
|
Inner |
|||||||||||
|
Command |
Loop |
||||||||||
|
Input |
Spool |
||||||||||
|
P |
|||||||||||
|
Poppet |
|
|
Valve |
Actuator |
|
Hall |
|
|
Piezo |
|
|
Voltage |
|
|
Piezo |
|
|
Valve |
|
Characterization, |
+ |
|||||||||
|
+ |
Σ |
I |
+ |
Σ |
Σ |
_ |
||||
|
+ |
||||||||||
|
Soft Limits, |
Inner-Loop |
|||||||||
|
_ |
+ |
Output |
||||||||
|
Output |
||||||||||
|
Percentage |
||||||||||
|
Final |
D |
|||||||||
|
Command |
||||||||||
|
Inner-Loop |
Control |
|||||||||
|
Offset |
Position |
Valve |
||||||||
|
Feedback |
|
Figure 1: Principles of Operation of Logix 420 |
|
|
one of several pre-defined characterization curve |
|
|
flowserve.com |
4 |
User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
adjustments (including several Equal Percent), or a 21-point Custom Characterization curve adjustment. In Linear mode, the input signal is passed straight through to the control algorithm in a 1:1 transfer. In Equal Percent (=%) mode, the input signal is mapped to a standard rangeability equal percent curve. If Custom Characterization is enabled, the input signal is mapped to a custom, user-defined 21-point output curve. The custom user-defined 21-point output curve is defined using a handheld or ValveSight software. In addition, two user-defined features, Soft Limits and Tight Shutoff may affect the position. The actual command being used to position the stem after the evaluation of characterization curves and user limits, is called the Final Command.
1.12 Outer Loop
The Logix 420 uses a two-stage, stem-positioning algorithm. The two stages consist of an inner-loop (pilot relay control) and an outer-loop (stem position control). Referring again to Figure 1, a stem position sensor provides a measurement of the stem movement. The Final Command is compared against the Stem Position. If any deviation exists, the control algorithm sends a signal to the inner-loop control to move the relay in a direction, depending upon the deviation. The innerloop then quickly adjusts the spool position. The actuator pressures change and the stem begins to move. The stem movement reduces the deviation between Final Command and Stem Position. This process continues until the deviation goes to zero.
1.13 Inner Loop
The inner-loop controls the position of the relay valve by meansVentof a driver module. The driver module consists of a temperature-compensated hall-effect sensor and a Piezo valve pressure modulator. The Piezo valve pressure modulator controls the air pressure under a diaphragm by means of a Piezo beam bender. The Piezo beam deflects in response to an applied voltage from the inner-loop electronics. As the voltage to the Piezo valve increases, the Piezo beam bends, closing off against a nozzle causing the pressure under the diaphragm to increase. As the pressure under the diaphragm increases or decreases, the poppet valve moves up or down respectively. The Hall effect sensor transmits the position of the poppet back to the inner-loop electronics for control purposes.
1.14Detailed Sequence of Positioner Operations
A more detailed example explains the control function. Assume the unit is configured as follows:
Unit is in Analog command source.
Custom characterization is disabled (therefore characterization is Linear).
No soft limits enabled. No tight shutoff (MPC) set.
Valve has zero deviation with a present input signal of 12 mA.
Loop calibration: 4 mA = 0% command, 20 mA = 100% command.
Actuator is tubed and positioner is configured air-to- open.
Given these conditions, 12 mA represents a Command source of 50 percent. Custom characterization is disabled so the command source is passed 1:1 to the Final Command. Since zero deviation exists, the stem position is also at 50 percent. With the stem at the desired position, the poppet valve will be at a middle position that balances the pressures and spring force in the actuator. This is commonly called the null or balanced poppet position.
Assume the input signal changes from 12 mA to 16 mA. The positioner sees this as a command source of 75 percent. With Linear characterization, the Final Command becomes 75 percent. Deviation is the difference between Final Command and Stem Position: Deviation = 75% — 50% = +25%, where 50 percent is the present stem position. With this positive deviation, the control algorithm sends a signal to move the poppet up from its present position. As the poppet moves, the supply air is applied to the bottom of the actuator. This new pressure differential causes the stem to start moving towards the desired position of 75 percent. As the stem moves, the Deviation begins to decrease. The control algorithm begins to reduce the poppet opening. This process continues until the Deviation goes to zero. At this point, the poppet will be back in its null or balanced position. Stem movement will stop and the desired stem position is now achieved.
1.15 Inner Loop Offset
The position of the poppet at which the pressure and springs are balanced, holding the valve position in a steady state, is called the Inner Loop Offset. The controlling algorithm uses this value as a reference in determining the Piezo voltage. This parameter is important for proper control and is optimized and set automatically during stroke calibration.
User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
|
2 |
SPECIFICATIONS |
|||
|
2.1 |
Input Signal |
|||
|
Table 1: Input Signal |
||||
|
Power Supply |
Two-wire, 4-20 mA |
|||
|
10.0 VDC terminal voltage |
||||
|
Input Signal Range |
4 — 20 mA (HART) |
|||
|
Compliance Voltage |
10.0 VDC @ 20 mA |
|||
|
Effective Resistance |
500 Ω @ 20 mA Typical |
|||
|
Minimum Required Operating |
3.8 mA |
|||
|
Current |
||||
|
Signal Interrupt Without Restart |
80 ms |
|||
|
Time (after powering positioner |
||||
|
for at least one minute) |
||||
|
Maximum Shut-down Current |
3.6 mA |
|||
|
Communications |
HART protocol |
|||
|
2.2 |
Air Supply |
|||
|
Table 2: Air Supply |
||||
|
Minimum Input Pressure |
1.5 Bar (22 PSI) |
|||
|
Maximum Input Pressure |
Single Acting Relay – 6 Bar (87 PSI) |
|||
|
Air Supply Quality |
The air supply must be free from |
|||
|
moisture, oil and dust by conforming to |
||||
|
the ISA 7.0.01 standard. (A dew point |
||||
|
at least 18 degrees Fahrenheit below |
||||
|
ambient temperature, particle size |
||||
|
below five microns—one micron |
||||
|
recommended—and oil content not to |
||||
|
exceed one part per million). |
||||
|
Operating Humidity |
0 — 100% non-condensing |
|||
|
Acceptable Supply |
Air, sweet natural gas, nitrogen and |
|||
|
Gasses |
CO2 are acceptable supply gasses. |
|||
|
Sour natural gas is not acceptable. |
||||
|
Air Consumption |
0.069 Nm³/h @ 1.5 bar |
|||
|
(0.041 SCFM @ 22 PSI) |
||||
|
0.082 Nm³/h @ 4.1 bar |
||||
|
(0.050 SCFM @ 60 PSI) |
||||
2.3 Physical Specifications
Table 3: Physical Specifications
For dimensions, see section 15 POSITIONER .
|
Housing Material |
Cast, powder-painted aluminum |
|
EN AC-AlSi12(Fe) |
|
|
Soft Goods |
Fluorosilicone |
Weight of Base Positioner With LCD and Glass Cover Without Accessories 2.70 kg (5.95 lb)
With Solid Cover
3.11 kg (6.85 lb)
2.4 Pneumatic Output
Table 4: Pneumatic Output
|
Output Pressure |
0 to 100% of air supply pressure. |
|
Range |
|
|
Output Air Capacity |
Single Acting Relay – |
|
9.06 Nm³/h @ 1.5 bar |
|
|
(5.33 SCFM @ 22 PSI) |
|
|
20.8 Nm³/h @ 4.1 bar |
|
|
(12.2 SCFM @ 60 PSI) |
|
2.5 Stroke Output
Table 5: Stroke Output
|
Feedback shaft |
Min 15°, Max 90° |
|
|
Rotation |
45° recommended for linear applications. |
|
2.6 Temperature
Table 6: Temperature
|
Operating |
-52 to 85°C (-61.6 to 185°F) |
|
|
Temperature Range* |
Transport and Storage -52 to 85°C (-61.6 to 185°F)
Range
*Reduced performance at low temperatures.
2.7 Positioner Performance Characteristics
Table 7: Performance Characteristics
Better than or equal to the following values on a 25 square inch Mark I actuator per standard ISA 75.13.
|
Resolution |
0.25% |
|
Linearity |
+/-1.25% |
|
Repeatability |
0.25% |
|
Hysteresis |
1.0% |
|
Deadband |
0.3% |
|
Sensitivity |
0.25% |
|
Stability |
0.4% |
|
Long term drift |
0.5% |
|
Supply Pressure Effect |
0.2% |
2.8 ValveSight DTM Software Specifications
Table 8: ValveSight DTM Software Specifications
|
Computer |
Minimum Pentium processor running |
|
Windows 95, 98, NT, 2000, XP, 32 MB total |
|
|
memory (64 MB recommended), 30 MB |
|
|
available hard disk space, CD-ROM drive |
|
|
Ports |
1 minimum available with 8 maximum |
|
possible. (Can also communicate via serial, |
|
|
PCMCIA and USB connections) |
|
|
HART Modem |
RS-232, PCMCIA card, or USB |
|
HART Filter |
May be required in conjunction with some |
|
DCS hardware. |
|
|
HART MUX |
MTL 4840/ELCON 2700 |
User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
3 HAZARDOUS AREA CERTIFICATIONS
 Table 9: Logix 420 Hazardous Locations Information
Table 9: Logix 420 Hazardous Locations Information
|
ATEX |
North America (cFMus) |
|||||||||
|
Explosion Proof/Flame Proof |
Explosion Proof |
|||||||||
|
FM13ATEX0097X |
Class I, Div 1, Groups B,C,D |
|||||||||
|
II 2 G |
Class I, Zone 1, AEx d IIB+H2 T4/T6 (US) |
|||||||||
|
Ex d IIB+H2 Gb T4/T6 |
Class 1, Zone 1, Ex d IIB +H2 T4/T6 (Canada) |
|||||||||
|
T4 Tamb = -52˚C ≤ Ta ≤ +85˚C |
T4 Tamb = -52˚C ≤ Ta ≤ +85˚C |
|||||||||
|
T6 Tamb = -52˚C ≤ Ta ≤ +45˚C |
T6 Tamb = -52˚C ≤ Ta ≤ +45˚C |
|||||||||
|
IP 66 |
||||||||||
|
Intrinsically Safe |
||||||||||
|
Intrinsically Safe |
Class I, Div 1, Groups A,B,C,D |
|||||||||
|
FM12ATEX0009X |
Class I, Zone 0, AExia IIC (US) |
|||||||||
|
II 1 G |
Class I, Zone 0, Ex ia IIC (Canada) |
|||||||||
|
Ex ia IIC Ga T4/T6 |
T4 Tamb = -20˚C ≤ Ta ≤ +85˚C |
|||||||||
|
T4 Tamb = -20˚C ≤ Ta ≤ +85˚C |
T6 Tamb = -52˚C ≤ Ta ≤ +45˚C |
|||||||||
|
T6 Tamb = -52˚C ≤ Ta ≤ +45˚C |
Type 4X |
|||||||||
|
IP 66 |
||||||||||
|
Entity |
4-20 |
|||||||||
|
Entity |
4-20 |
Parameters |
Input |
|||||||
|
Parameters |
Input |
|||||||||
|
Ui (Vdc)= |
30 |
|||||||||
|
Ui (Vdc)= |
30 |
|||||||||
|
Ii (mA)= |
100 |
|||||||||
|
Ii (mA)= |
100 |
|||||||||
|
Pi (mW)= |
800 |
|||||||||
|
Pi (mW)= |
800 |
|||||||||
|
Ci (nF)= |
0 |
|||||||||
|
Ci (nF)= |
0 |
|||||||||
|
Li (µH)= |
47 |
|||||||||
|
Li (µH)= |
47 |
|||||||||
|
Note: Reference installation drawing # 291780 |
||||||||||
|
Note: Reference installation drawing # 291780 |
||||||||||
|
IECEx |
Warning! |
|||||||||
|
Explosion Proof/Flame Proof |
Covers must be properly installed in order to maintain |
|||||||||
|
FMG 13.0038X |
environmental ratings. |
|||||||||
|
II 2 G |
Special Conditions for Safe Use: |
|||||||||
|
Ex d IIB+H2 Gb T4/T6 |
The equipment must be installed in such a manner as to |
|||||||||
|
T4 Tamb = -52˚C ≤ Ta ≤ +85˚C |
minimize the risk of impact or friction with other metal surfaces. |
|||||||||
|
T6 Tamb = -52˚C ≤ Ta ≤ +45˚C |
To avoid possibility of static discharge clean only with a damp |
|||||||||
|
IP 66 |
cloth. |
|||||||||
|
Intrinsically Safe |
For Intrinsically Safe installations the positioner must be |
|||||||||
|
connected to suitably rated intrinsically safe equipment, and |
||||||||||
|
FMG 12.0001X |
||||||||||
|
must be installed in accordance with applicable intrinsically safe |
||||||||||
|
Ex ia IIC Ga T4/T6 |
||||||||||
|
installation standards. |
||||||||||
|
T4 Tamb = -20˚C ≤ Ta ≤ +85˚C |
||||||||||
|
Substitution of components may impair Intrinsic Safety. |
||||||||||
|
T6 Tamb = -52˚C ≤ Ta ≤ +45˚C |
Use appropriately rated cable insulation at higher temperatures. |
|||||||||
|
IP 66 |
Contact Flowserve for flame path information. |
|||||||||
|
Entity |
4-20 |
Conditions spéciales pour une utilisation en toute sécurité: |
||||||||
|
Le matériel doit être installé de sorte à réduire au minimum le |
||||||||||
|
Parameters |
Input |
|||||||||
|
risque de choc ou de frottement avec d’autres surfaces |
||||||||||
|
métalliques. |
||||||||||
|
Ui (Vdc)= |
30 |
|||||||||
|
Pour éviter les risques de décharge d’électricité statique |
||||||||||
|
Nettoyez uniquement avec un chiffon humide. |
||||||||||
|
Ii (mA)= |
100 |
|||||||||
|
Pour les installations en sécurité intrinsèque, le positionneur |
||||||||||
|
doit être connecté à un équipement sécurité intrinsèque |
||||||||||
|
Pi (mW)= |
800 |
convenablement qualifié, et doit être installé conformément aux |
||||||||
|
normes d’installation sécurité intrinsèque applicables. |
||||||||||
|
Ci (nF)= |
0 |
|||||||||
|
La substitution de composants peut compromettre la sécurité |
||||||||||
|
intrinsèque. |
||||||||||
|
Li (µH)= |
47 |
|||||||||
|
Utiliser une isolation appropriée du câble à des températures |
||||||||||
|
plus élevées. |
||||||||||
|
Note: Reference installation drawing # 291780 |
||||||||||
|
Contactez Flowserve pour les informations de trajet de flamme. |
||||||||||
|
flowserve.com |
7 |
User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
4 STORAGE AND UNPACKING
4.1 Storage
FLOWSERVE Control valve packages (a control valve and its instrumentation) are typically well protected from corrosion. Nevertheless FLOWSERVE products must be stored in a clean, dry environment such as an enclosed building that affords environmental protection. Heating is not required. Control valve packages must be stored on suitable skids, not directly on the floor. The storage location must also be free from flooding, dust, dirt, etc. Plastic caps are fitted to protect the flange faces and positioner ports to prevent the ingress of foreign materials. These caps should not be removed until the valve or positioner is actually mounted into the system.
If FLOWSERVE products (especially sealing materials) have been in storage for longer periods check these for corrosion or deterioration before using these products. Fire protection for FLOWSERVE products must be provided by the end user.
4.2 Unpacking
While unpacking the valve and/or Logix 500MD+ positioner, check the packing list against the materials received. Lists describing the system and accessories are included in each shipping container.
In the event of shipping damage, contact the shipper immediately. Should any problems arise, contact a Flowserve Flow Control Division representative.
4.3 Pre-installation Inspection
When installing a positioner, verify the shaft has not been damaged and that the plugs and cover are in place. The plugs keep debris and moisture from damaging the internal components of the positioner. If the positioner has been contaminated, clean the positioner components gently with a soft damp cloth. Some components may be removed for better access. See section 13 MAINTENANCE AND REPAIR. Check connectors to ensure that no debris is present. Port screens can be removed with a flat screwdriver for access to internal passages.
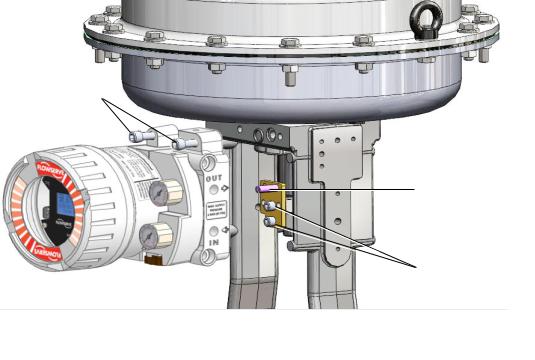
User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
5 MOUNTING AND INSTALLATION
5.1Direct Mounting to Valtek GS and FlowTop
Refer to Figure 2: Valtek GS and FlowTop Mounting.
1Assemble the take-off pin to the take-off plate and mount the take-off plate to the valve stem using the two screws. See Table 10: FlowTop and GS Take-Off Plate and Pin Configuration for proper plate and pin orientation.
2Place the actuator O-ring.
3Ensure the 1/16 NPT plug for the control port (if present) has been removed.
4Place the positioner on the actuator, ensuring the takeoff pin is inside the follower arm slot. Adjust the follower arm as needed.
NOTE: The feedback shaft has a clutch mechanism that allows for over-rotation of the shaft for easy adjustments. Just move the follower arm to the desired location.
5Use the actuator screws to secure the positioner in place.
6Connect regulated air supply to appropriate port in manifold. See section 6 TUBING.
7Connect the power to the 4-20 mA terminals. See section 7 ELECTRICAL CONNECTIONS.
8Remove main cover and locate DIP switches and QUICK-CAL/ACCEPT button.
9Refer to sticker on main board cover and set DIP switches accordingly. See section 8 STARTUP.
10Press the QUICK-CAL/ACCEPT button for three to four seconds or until the positioner begins to move. The positioner will now perform a stroke calibration.
 CAUTION: Performing a Stroke Calibration will cause full movement of the valve in both directions.
CAUTION: Performing a Stroke Calibration will cause full movement of the valve in both directions.
11If the calibration was successful the green LED will blink GGGG or GGGY and the valve will be in control mode.
12If calibration fails, as indicated by a RGGY blink code, retry the calibration. If it still fails, the feedback values were exceeded and the arm must be adjusted away from the positioner’s limits. Rotate the feedback shaft so that the full free travel of the feedback shaft is in the range of the actuator movement. Optionally, continue to attempt the calibration. Each calibration attempt adjusts the acceptable limits and it should pass eventually.
 CAUTION: Remember to remove the air supply before re-adjusting follower arm.
CAUTION: Remember to remove the air supply before re-adjusting follower arm.
NOTE: If mounted properly, the follower arm should be horizontal when the valve is at 50% stroke and should move approximately ±30° from horizontal over the full stroke of the valve.
NOTE: To virtually eliminate any non-linearity due to linkage geometry, use the Linearization feature on the Custom Characterization page of the DTM.
Actuator
 Actuator O-
Actuator O-
Take-Off
 Take-Off Plate
Take-Off Plate
Take-Off Plate
Screws
|
flowserve.com |
Figure 2: Valtek GS and FlowTop Mounting |
|
9 |
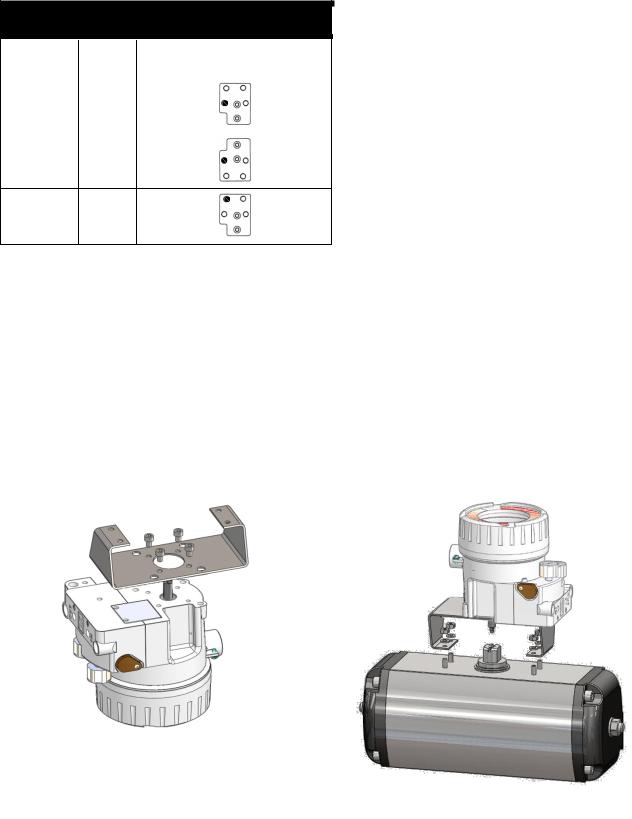
User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
Table 10: FlowTop and GS Take-Off Plate and Pin
Configurations
|
Actuator |
Stroke |
Plate and Pin Orientation |
|
(mm) |
||
|
127 / 252 |
10 |
|
|
127 / 252 |
20 |
50220 or 40
5.2Mounting to NAMUR Valves
1Attach the mounting plate to the positioner using 4 screws.
2Rotate the feedback shaft to match the orientation of the receiver on the actuator.
NOTE: The feedback shaft has a clutch mechanism that allows for over-rotation of the shaft for easy adjustments.
|
3 |
Mount the positioner onto the actuator using the |
||
|
washers |
and |
nuts. |
4Connect regulated air supply to appropriate port in manifold. See section 6 TUBING.
5Connect the power to the 4-20 mA terminals. See section 7 ELECTRICAL CONNECTIONS.
6Remove main cover and locate DIP switches and QUICK-CAL/ACCEPT button.
7Refer to sticker on main board cover and set DIP switches accordingly. See section 8 STARTUP.
8Press the QUICK-CAL/ACCEPT button for three to four seconds or until the positioner begins to move. The positioner will now perform a stroke calibration.
9If the calibration was successful the green LED will blink GGGG or GGGY and the valve will be in control mode.
10If calibration fails, as indicated by a RGGY blink code, retry the calibration. If it still fails, remove power from the positioner, disconnect the air, and remove the positioner from the actuator. Rotate the feedback shaft so that the full free travel of the feedback shaft is in the range of the actuator movement. Optionally, continue to attempt the calibration. Each calibration attempt adjusts the acceptable limits and it should pass eventually.
 CAUTION: Remember to remove the air supply before re-adjusting take-off arm.
CAUTION: Remember to remove the air supply before re-adjusting take-off arm.
Figure 3: NAMUR Bracket
Figure 4: AutoMax Assembly
![]()
User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
6 TUBING
After mounting has been completed, tube the positioner to the actuator using the appropriate compression fitting connectors. For best performance, use 10 mm (3/8 inch) tubing for 645 square cm (100 square inch) actuators or larger.
6.1 Determine Air Action
The port labeled “Out” delivers air when an air supply is present and the relay is energized. This port should be tubed to the pneumatic side of the actuator (the side that would result in the air compressing the actuator spring). When tubed this way, the spring is designed to return the valve to the fail safe state should supply air or power to the unit fail.
If air from the output should open the valve, set the Air Action configuration switch on the positioner to Air-to-Open, otherwise set it to Air-to-Close.
The Air-to-Open and Air-to-Close selection is determined by the actuator assembly, not the software.
6.3 Vented Design
A standard Logix 420 positioner is vented directly to the atmosphere. When supply air is substituted with sweet natural gas, piping must be used to route the exhausted natural gas to a safe environment.
The exhaust port is located on the bottom of the positioner. The port is tapped with either ¼ NPTF threads and covered with a protective cap. To control vented gas, remove the cap and connect the necessary tubing/piping to this port.
This piping system may cause some positioner back pressure.
The maximum allowable back pressure from the exhaust port is 0.14 barg (2.0 PSIG). For output flow rates, see section 2.4 Pneumatic Output.
 CAUTION: The back pressure in the main housing must never rise above 0.14 barg (2.0 PSIG). This could cause the positioner to become unresponsive under some circumstances.
CAUTION: The back pressure in the main housing must never rise above 0.14 barg (2.0 PSIG). This could cause the positioner to become unresponsive under some circumstances.
6.2 Connect Supply Port
The positioner ports are threaded with 1/4 NPTF. The direct mount output is 1/16 NPTF.
In order to maintain the recommended air quality, a coalescing filter should always be installed in the supply gas line. An air filter is highly recommended for all applications where dirty air is a possibility. The positioner passage ways are equipped with small filters, which remove medium and coarse size dirt from the pressurized air. If necessary, they are easily accessible for cleaning.
In applications where the supply pressure is higher than the maximum actuator pressure rating a supply regulator is required to lower the pressure to the actuator’s maximum rating.
6.4 Purging
Purging is intended to supply the non-pressurized side of a single acting actuator with instrument air. This helps prevent air from the environment (which may be salty, dirty or humid) from corroding the springs and other actuator components. Purging uses exhaust air from the positioner to flush the spring side of the actuator.
Tubing Configuration — Tube the Exhaust port with a “T” where one line goes to the non-pressurized side of the positioner and the second line goes to the atmosphere. Install an exhaust plug on the second line to prevent debris from entering the tubing.
Out (Direct Mount Control)
Out (Control)
In (Supply)
Exhaust (Piezo and Actuator)
(0.14 barg (2 psi) Max)
|
Figure 5: Pneumatic Ports |
|
|
flowserve.com |
11 |

User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
7 ELECTRICAL CONNECTIONS
7.1 Electrical Terminals
Housing EARTH
Terminal
Internal
External
HART 4-20 mA Inp ut —
Figure 6: Terminal Diagram
Example:
7.2 Command Input (4-20 mA) Connection
The Logix 420 is reverse polarity protected, however, verify polarity when making field termination connection. Wire 4-20 mA current source to the input terminal labeled “HART 4- 20mA INPUT”. See Figure 6: Terminal Diagram. Depending on the current source, a HART filter may be required. See 14.1 Troubleshooting Guide.
( )
7.2.1Compliance Voltage
Output compliance voltage refers to the voltage limit the current source can provide. A current loop system consists of the current source, wiring resistance, barrier resistance (if present), and the Logix 420 impedance.
The Logix 420 requires that the current loop system allow for a 10 VDC drop across the positioner at maximum loop current. The operating current range is from 3.8 to 24 mA.
In order to determine if the loop will support the Logix 420, perform the calculation in Equation 1. The Available Voltage must be greater than 10VDC in order to support the Logix 420. Also, see Table 1: Input Signal.
Equation 1
( )
( )
The available voltage (12.5 V) is greater than the required voltage (10.0 V) therefore; this system will support the Logix 420. The Logix 420 has an input resistance equivalent to 500
Ω at a 20 mA input current.
 CAUTION: The current must always be limited for 4-20 mA operation. Never connect a voltage source directly across the Logix 420 terminals. This could cause permanent circuit board damage.
CAUTION: The current must always be limited for 4-20 mA operation. Never connect a voltage source directly across the Logix 420 terminals. This could cause permanent circuit board damage.
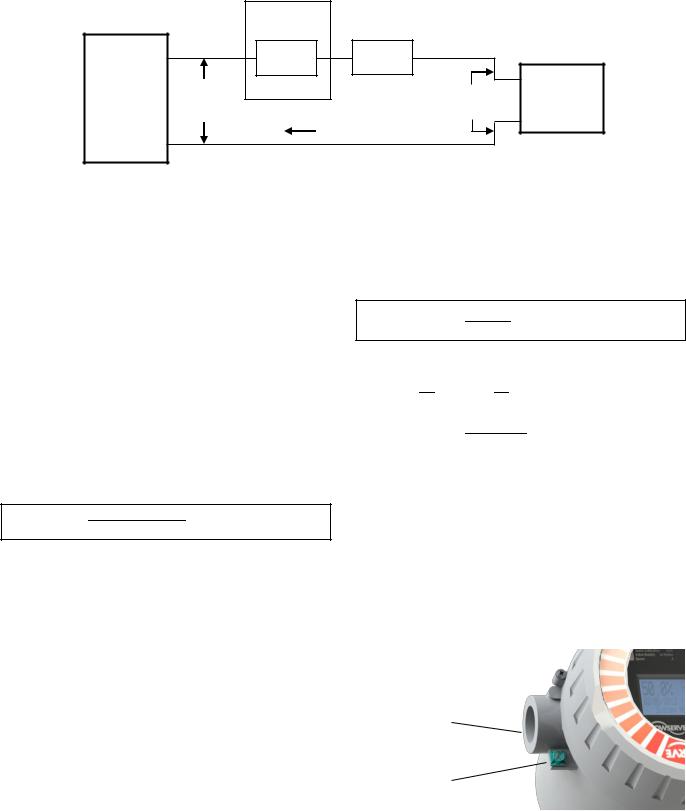
User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
|
Barrier |
||||
|
(If Present) |
Wire |
|||
|
4-20 mA |
Controller |
R |
R Compliance 10 |
|
|
Current |
Voltage |
Voltage |
VDC |
|
|
Source |
||||
|
Current |
Figure 7: Compliance Voltage
7.2.2Cable Requirements
The Logix 420 digital positioner utilizes the HART Communication protocol. This communication signal is superimposed on the 4-20 mA current signal. The two frequencies used by the HART protocol are 1200 Hz and 2200 Hz. In order to prevent distortion of the HART communication signal, cable capacitance and cable length restrictions must be calculated. The cable length must be limited if the capacitance is too high. Selecting a cable with lower capacitance/foot rating will allow longer cable runs. In addition to the cable capacitance, the network resistance also affects the allowable cable length.
In order to calculate the maximum network capacitance, use the following formula:
Equation 2
Example:
|
(if present) |
|||||
|
( ) |
= 0.08 |
||||
|
( |
) |
||||
In order to calculate the maximum cable length, use the following formula:
Equation 3
Example:
To control cable resistance, 24 AWG cable should be used for runs less than 5000 feet. For cable runs longer than 5000 feet, 20 AWG cable should be used.
The input loop current signal to the Logix 420 digital positioner should be in shielded cable. Shields must be tied to a ground at only one end of the cable to provide a place for environmental electrical noise to be removed from the cable. In general, shield wire should be connected at the source, not at the positioner.
Conduit
Connection
Grounding
Terminal
Figure 8: Conduit and Grounding

User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
7.2.3Intrinsically Safe Barriers
When selecting an intrinsically safe barrier, make sure the barrier is HART compatible. Although the barrier will pass the loop current and allow normal positioner control, if not compatible, it may prevent HART communication.
7.2.4Grounding and Conduit
The grounding terminal, located by the electrical conduit port should be used to provide the unit with an adequate and reliable earth ground reference. This ground should be tied to the same ground as the electrical conduit. Additionally, the electrical conduit should be earth grounded at both ends of its run.
This product has electrical conduit connections in a thread size of 1/2″ NPTF. Conduit fittings must match equipment housing threads for installation.
NOTE: The grounded screw must not be used to terminate signal shield wires. Shield wires should be terminated only at the signal source.
7.2.5Electromagnetic Compatibility
The Logix 420 digital positioner has been designed to operate correctly in electromagnetic (EM) fields found in typical industrial environments. Care should be taken to prevent the positioner from being used in environments with excessively high EM field strengths (greater than 10 V/m). Portable EM devices such as hand-held two-way radios should not be used within 30 cm of the device.
Ensure proper wiring and shielding techniques of the control lines, and route control lines away from electromagnetic sources that may cause unwanted electrical noise. An electromagnetic line filter can be used to further eliminate noise (FLOWSERVE Part Number 10156843).
In the event of a severe electrostatic discharge near the positioner, the device should be inspected to ensure correct operability. It may be necessary to recalibrate the Logix 420 positioner to restore operation.
7.3Connections for Intrinsically Safe Operation
For intrinsically safe connections, see entity parameters in section 3 HAZARDOUS AREA CERTIFICATIONS. If a control drawing is required, ask your Flowserve representative for drawing 314746 — CONTROL DRAWING, LOGIX 420 DIGITAL POSITIONER.
|
Configuration |
|
|
Switches |
Selectable |
|
GAIN |
|
|
Display |
Switch |
LED
Status
Lights
|
HART |
|||
|
4-20 |
|||
|
mA |
|||
|
Input BACK |
|||
|
Button |
|||
|
(Move |
UP Button |
QUICK-CAL/ |
|
|
Left) |
ACCEPT |
||
|
DOWN Button |
Button |
||
|
Figure 9: Local User Interface |
Питание вкючено
Режим отсечки по минимальному положению (герметичная отсечка)
Местный интерфейс блокирован
Режим управления клапаном по командам цифрового интерфейса (HART)
Производится инициализация
Контрольный режим
Внутреннее ПО блокирует помещение затвора клапана за установленное максимальное положение
Внутреннее ПО блокирует помещение затвора клапана за установленное минимальное положение
Требуется калибровка управляющего давления
Требуется калибровка силы трения
Сигнализация о необходимости проведения проверки неполного хода в соответствии с графиком предварительно установленным пользователем
Выполняется снятие характеристики и проверки неполного хода
Выполняется снятие характеристики и проверки неполного хода
Выполняется калибровка хода
Выполняется калибровка управляющего давления
Выполняется калибровка силы трения
Выполняется калибровка аналогового выхода
Выполняется калибровка входного командного сигнала внутреннего контура управления
Приоритетная команда на дискретном входе
Режим ручного управления
Когда в процессе ручной калибровки появится данная световая индикация, с помощью кнопок ▼ и ▲ установите затвор клапана в полностью открытое
положение. Для подтверждения нажмите на кнопку QUICK-CAL/ACCEPT
Затвор клапана достиг установленного максимального положения или перешел за него
Затвор клапана достиг установленного минимального положения иперешел за него
Превышено предельное количество циклов работы привода
Превышен предельный суммарный ход привода
Превышено предельное количество циклов работы сильфона
Превышен предельный суммарный ход сильфона
Превышено предельное количество циклов работы управляющего пневмораспределителя
Превышен предельный суммарный ход управляющего пневмораспределителя
Превышено предельное количество циклов работы клапана
Превышен предельный суммарный ход клапана
Предупредительная сигнализация — большая амплитуда изменения сигнала положения
Предупредительная сигнализация — высокая частота изменения сигнала положения
Предупредительная сигнализация — большая амплитуда изменения командного сигнала
Предупредительная сигнализация — высокая частота изменения командного сигнала
Сбой проверки работоспособности клапана (проверка заключается в выполнении малых перемещений от текущего положения)
Сбой проверки неполного хода
Температура выше допустимой
Температура ниже допустимой
Затвор клапана перешел за положение «закрыто», установленное при последней калибровке
Затвор клапана перешел за положение «открыто», установленное при последней калибровке
Предупредительная сигнализация — высокое давление питающего воздуха
Предупредительная сигнализация — низкое давление питающего воздуха
Развиваемого приводом усилия недостаточно для управления клапаном
Ошибка памяти
Ошибка программного обеспечения
Повышенная влажность питающего воздуха
Обледенение в системе питающего воздуха
Предупредительная сигнализация — некорректная работа управляющего пневмораспределителя
Предупредительная сигнализация — усилие трения ниже допустимого значениz
Предупредительная сигнализация — усиление трения выше допустимого значения
Предупредительная сигнализация — большой люфт в соединениях
Утечка воздуха в пневматической системе
Аккумулятор разряжен
Предупредительная сигнализация — высокое напряжение на пьезопреобразователе
Предупредительная сигнализация — низкое напряжение на пьезопреобразователе
Усилия пружин привода недостаточно для установки затвора клапана в положении безопасности
Командный сигнал внутреннего контура управления ниже рабочего диапазона аналого-цифрового преобразователя
Командный сигнал внутреннего контура управления выше рабочего диапазона аналого-цифрового преобразователя
Недостаточный диапазон изменения командного входного сигнала внутреннего контура управления
Недостаточный диапазон перемещения рычага обратной связи
Сигнал датчика положения выше рабочего диапазона аналого-цифрового преобразователя
Сигнал датчика положения ниже рабочего диапазона аналого-цифрового преобразователя
Истекло время стабилизации сигнала внутреннего контура
Истекло время стабилизации сигнала датчика положения
Истекло время ожидания перемещения привода
Недостаточный диапазон изменения выходного аналогового сигнала
Требуется калибровка хода
Сместился диапазон сигнала датчика положения по сравнению с последней калибровкой
Диапазон сигнала датчика положения уменьшился по сравнению с последней калибровкой
Диапазон сигнала датчика положения увеличился по сравнению с последней калибровкой
Восстановлены заводские установки. Выполните настройку позиционера и калибровку хода
Аварийная сигнализация — клапан невозможно открыть
Аварийная сигнализация — клапан невозможно закрыть
Аварийная сигнализация — большая амплитуда изменения командного сигнала
Аварийная сигнализация — высокая частота изменения командного сигнала
Аварийная сигнализация — большая амплитуда изменения сигнала положения
Аварийная сигнализация — высокая частота изменения сигнала положения
Аварийная сигнализация — низкое давление питающего воздуха
Ошибка вспомогательной платы 2
Отказ вспомогательной платы 2
Отсутствует питание вспомогательной платы 2
Ошибка вспомогательной платы 1
Отказ вспомогательной платы 1
Отсутствует питание вспомогательной платы 1
Аварийная сигнализация — отказ датчика положения
Отказ датчиков давления
Отказ блока электроники
Аварийная сигнализация — отказ управляющего пневмораспределителя
Аварийная сигнализация — усилие трения ниже допустимого значения
Аварийная сигнализация — усилие трения выше допустимого значения
Аварийная сигнализация — отказ механизма обратной связи
Аварийная сигнализация — большой люфт в соединениях
Аварийная сигнализация — отказ задающего модуля
Аварийная сигнализация — высокое напряжение на пьезопреобразователе
Аварийная сигнализация — низкое напряжение на пьезопреобразователе
Аварийная сигнализация — недопустимое отклонение от заданного положения

User Instructions — Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
flowserve.com
1
Logix
®
420
Digital Positioner
FCD LGENIM0106-0612/13
Installation
Operation
Maintenance
Safety Manual
USER INSTRUCTIONS

Logix® 420 Digital Positioner FCD LGENIM0106-07-AQ – 10/15
2
Contents
Quick Start Instructions 15
1 GENERAL INFORMATION 3
1.1 USING THIS DOCUMENT 3
1.2 TERMS CONCERNING SAFETY 3
1.3 PROTECTIVE CLOTHING 3
1.4 QUALIFIED PERSONNEL 3
1.5 VALVE AND ACTUATOR VARIATIONS 3
1.6 SPARE PARTS 3
1.7 SERVICE / REPAIR 3
1.8 BASIC OPERATION 4
1.9 HART 4
1.10 POSITION DEFINITION 4
1.11 COMMAND INPUT AND FINAL COMMAND 4
1.12 OUTER LOOP 5
1.13 INNER LOOP 5
1.14 DETAILED SEQUENCE OF POSITIONER OPERATIONS 5
1.15 INNER LOOP OFFSET 5
2 SPECIFICATIONS 6
2.1 INPUT SIGNAL 6
2.2 AIR SUPPLY 6
2.3 PHYSICAL SPECIFICATIONS 6
2.4 PNEUMATIC OUTPUT 6
2.5 STROKE OUTPUT 6
2.6 TEMPERATURE 6
2.7 POSITIONER PERFORMANCE CHARACTERISTICS 6
2.8 VALVESIGHT DTM SOFTWARE SPECIFICATIONS 6
3 HAZARDOUS AREA CERTIFICATIONS 7
4 STORAGE AND UNPACKING 8
4.1 STORAGE 8
4.2 UNPACKING 8
4.3 PRE-INSTALLATION INSPECTION 8
5 MOUNTING AND INSTALLATION 9
5.1 DIRECT MOUNTING TO VALTEK GS AND FLOWTOP 9
5.2 MOUNTING TO NAMUR VALVES 10
6 TUBING 11
6.1 DETERMINE AIR ACTION 11
6.2 CONNECT SUPPLY PORT 11
6.3 VENTED DESIGN 11
6.4 PURGING 11
7 ELECTRICAL CONNECTIONS 12
7.1 ELECTRICAL TERMINALS 12
7.2 COMMAND INPUT (4-20 MA) CONNECTION 12
7.3 CONNECTIONS FOR INTRINSICALLY SAFE OPERATION 14
8 STARTUP 15
8.1 QUICK START INSTRUCTIONS 15
8.2 LOCAL USER INTERFACE OVERVIEW 15
8.3 CONFIGURATION SWITCH SETTINGS 15
8.4 STROKE CALIBRATION 16
9 POSITIONER FUNCTIONS (NO DISPLAY REQUIRED) 18
9.1 LIVE MANUAL TUNING (ADJUSTING THE GAIN) 18
9.2 LOCAL CONTROL OF VALVE POSITION 18
9.3 COMMAND SOURCE RESET 18
9.4 FACTORY RESET 19
9.5 VIEWING VERSION NUMBERS 18
10 POSITIONER FUNCTIONS (LCD DISPLAY) 19
10.1 MAIN DISPLAY VIEW 19
10.2 MENU OVERVIEW 21
10.3 MENU FEATURES 22
11 HART COMMUNICATION 27
11.1 VALVESIGHT DTM 27
11.2 HART 475 HANDHELD COMMUNICATOR 27
11.3 BURST MODE 27
11.4 CHANGING HART VERSIONS 27
12 REQUIREMENTS FOR SAFETY INTEGRITY 28
12.1 FAIL SAFE STATE 28
12.2 SAFETY FUNCTION 28
12.3 FAIL SAFE STATE RESPONSE TIME 28
12.4 INSTALLATION 28
12.5 REQUIRED CONFIGURATION SETTINGS 28
12.6 MAXIMUM ACHIEVABLE SIL 28
12.7 RELIABILITY DATA 28
12.8 LIFETIME LIMITS 29
12.9 PROOF TESTING 29
12.10 MAINTENANCE 29
12.11 REPAIR AND REPLACEMENT 29
12.12 TRAINING REQUIREMENTS 29
13 MAINTENANCE AND REPAIR 30
13.1 SCHEDULED MAINTAINANCE 30
13.2 REQUIRED TOOLS AND EQUIPMENT 30
13.3 REPLACING A MAIN BOARD 30
14 TROUBLESHOOTING 31
14.1 TROUBLESHOOTING GUIDE 31
14.2 STATUS CODE INDEX 32
14.3 STATUS CODE DESCRIPTIONS 33
14.4 HELP FROM FLOWSERVE 39
15 POSITIONER DIMENSIONS 40
15.1 POSITIONER DIMENSIONS 40
16 HOW TO ORDER 41
16.1 POSITIONERS 41
16.2 SPARE PARTS KITS 41
16.3 MOUNTING KITS 41
INDEX 42