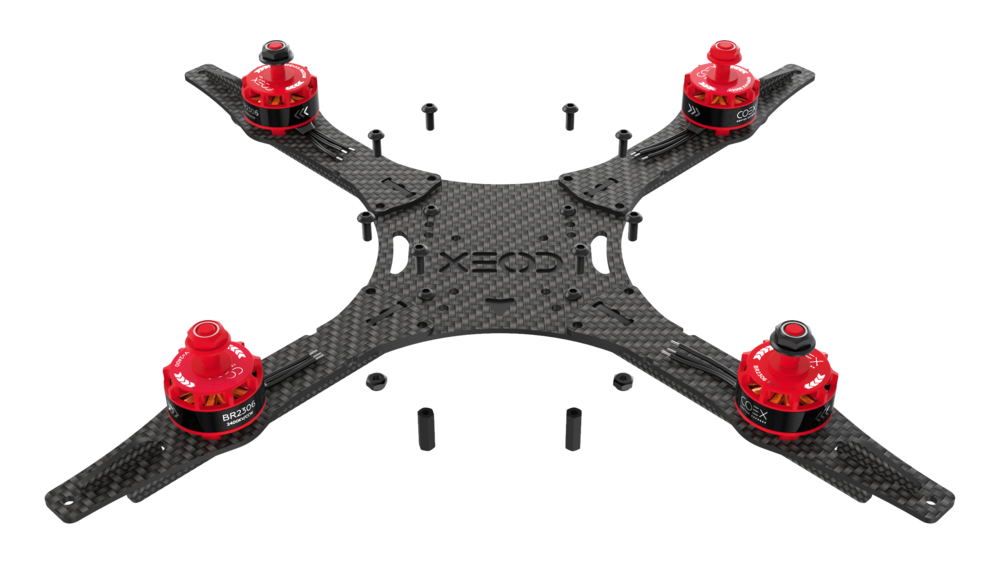
Сборка основы для рамы
Для увеличения прочности рамы вы можете распечатать на 3D принтере или нарезать на лазерном резаке рем-накладки.
-
В случае наличия, закрепите рем-накладки на пластинах жесткости, иначе продолжайте без них.

-
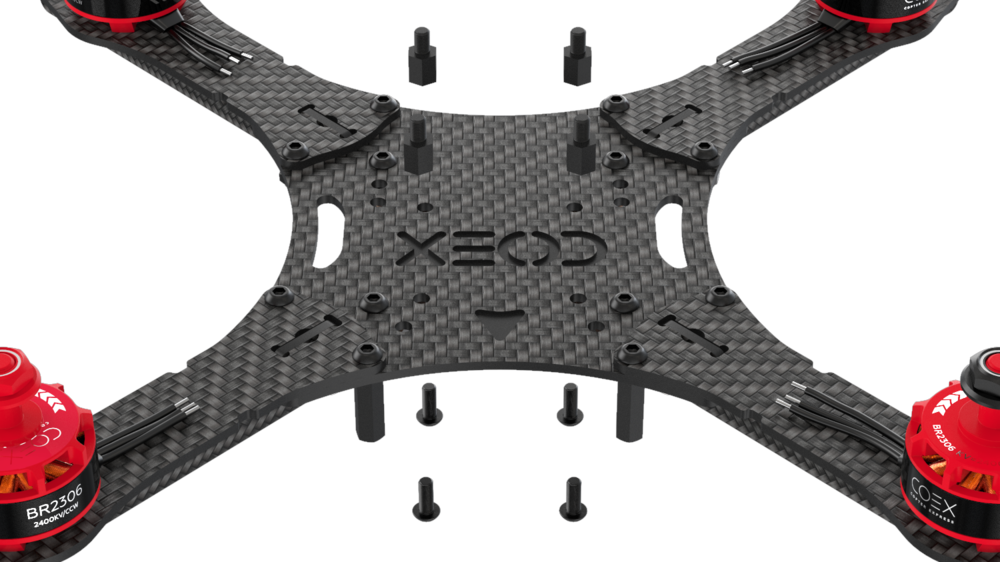
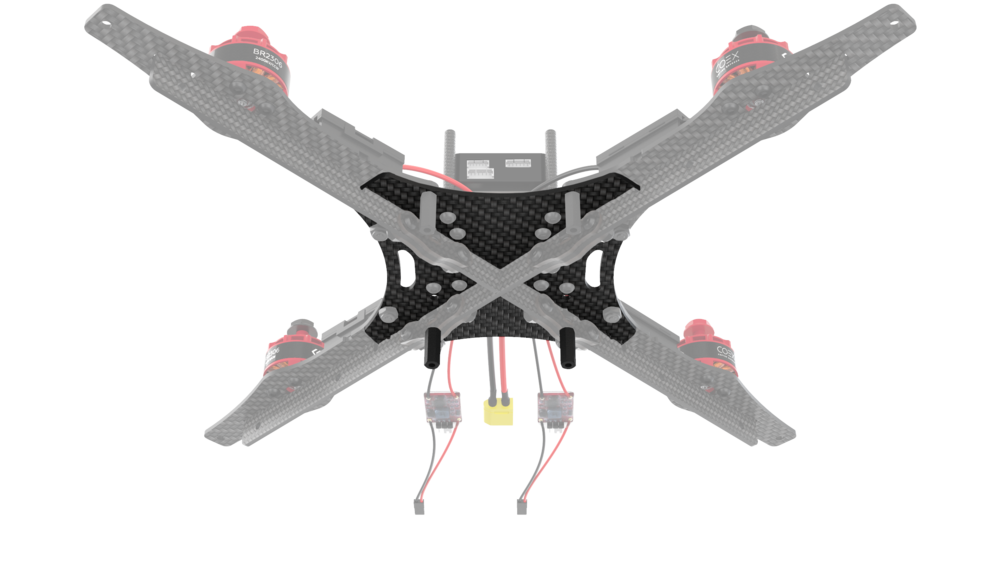
Совместите 2 карбоновые пластины жесткости, используя центральные пазы.
-
Используя пазы, установите сверху карбоновую центральную деку.
-
Стяните конструкцию с помощью винтов М3х8 и стальных гаек с нейлоновой вставкой, установленных в пазах пластин.
Установка моторов
- Распакуйте моторы.
-
Используя бокорезы, укоротите провода на моторах:
- Обрежьте половину длины (оставив 30 мм).
-
Зачистите (снимите 5 мм изоляции с конца провода, не повредив медные жилы).
-
Скрутите медные жилы.
- Залудите провода, используя пинцет.
-
Установите мотор на луч.
-
Прикрепите мотор к лучу винтами М3х5, используя шестигранный ключ или отвёртку.

Повторите эти действия для остальных моторов.
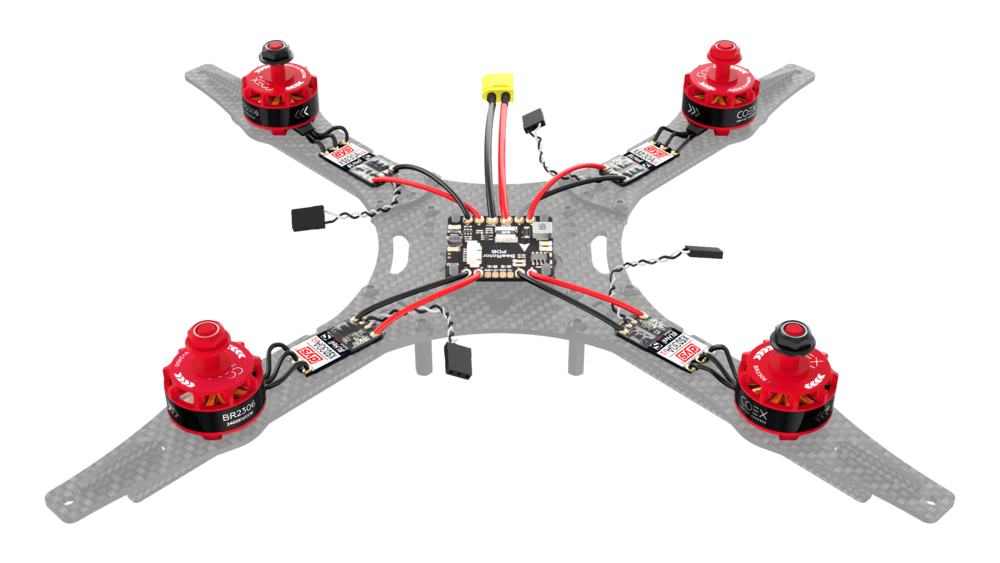
Сборка рамы
-
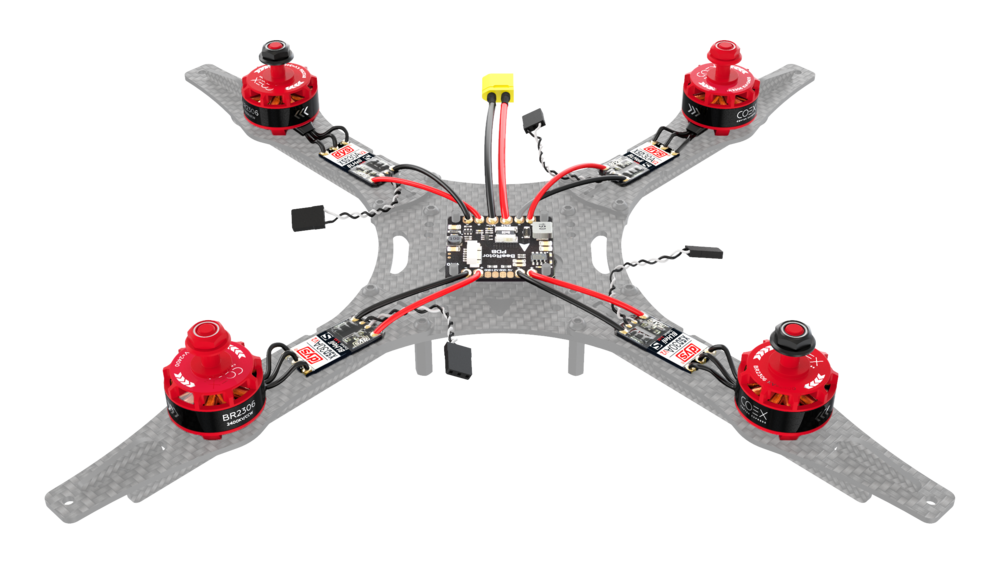
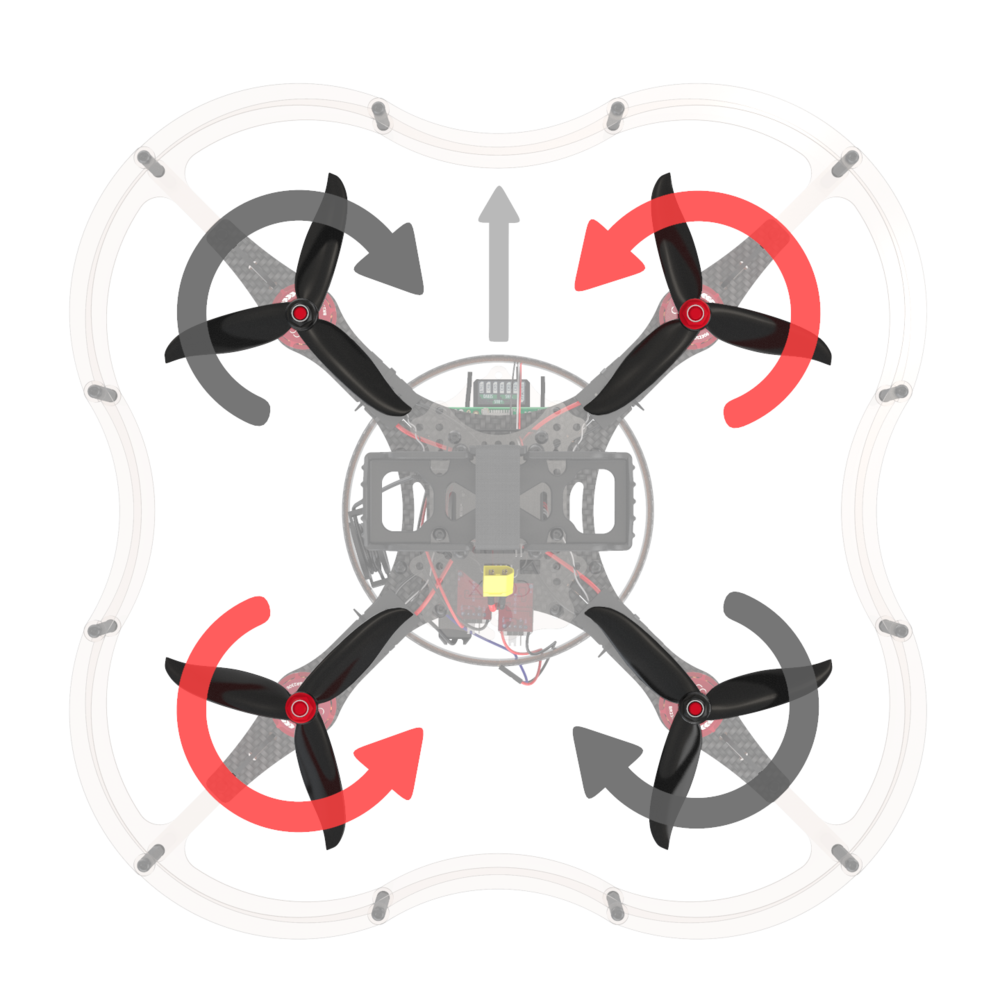
Установите 4 луча с моторами на базу рамы, используя пазы, согласно схеме вращения моторов.
Для правильной установки моторов обратите внимание на цвета гаек. Моторы с красными гайками следует установить на передний правый и задний левый лучи, с чёрными — на передний левый и задний правый.
-
Зафиксируйте лучи на раме, используя 8 винтов М3х8 и 6 стальных гаек, а также 2 стойки «мама-мама» 15 мм.


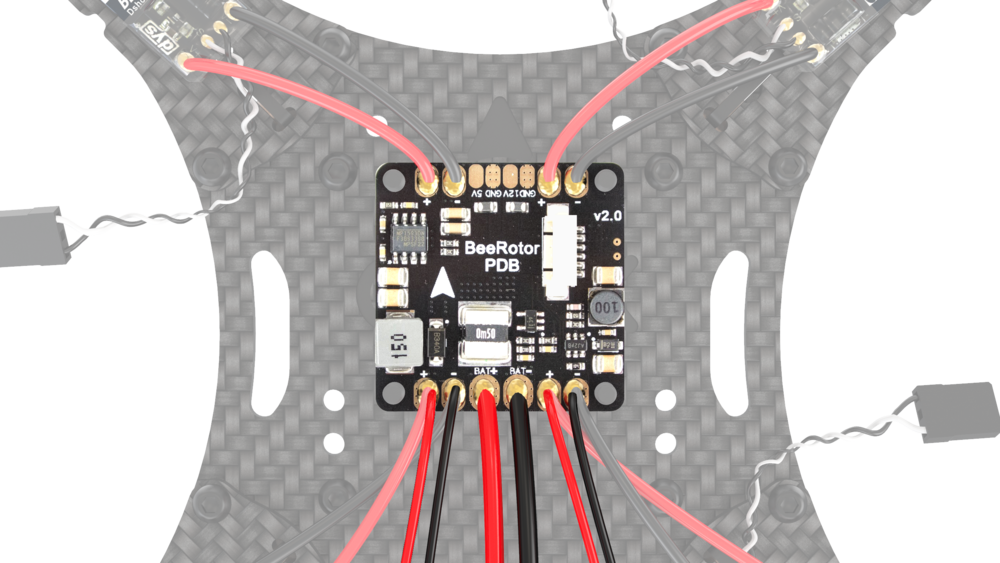
Подготовка платы распределения питания
- Залудите контактные площадки платы питания.
- С помощью мультиметра проверьте отсутствие короткого замыкания (прозвонить):
- Установите мультиметр в режим прозвонки.
- Проверьте работу мультиметра путем замыкания щупов между собой. При корректной работе прибор издаст характерный звук.
- Попарно один щуп прикладывается к контакту «+», а второй к «-»/GND. Если в цепи есть короткое замыкание, издается звук.
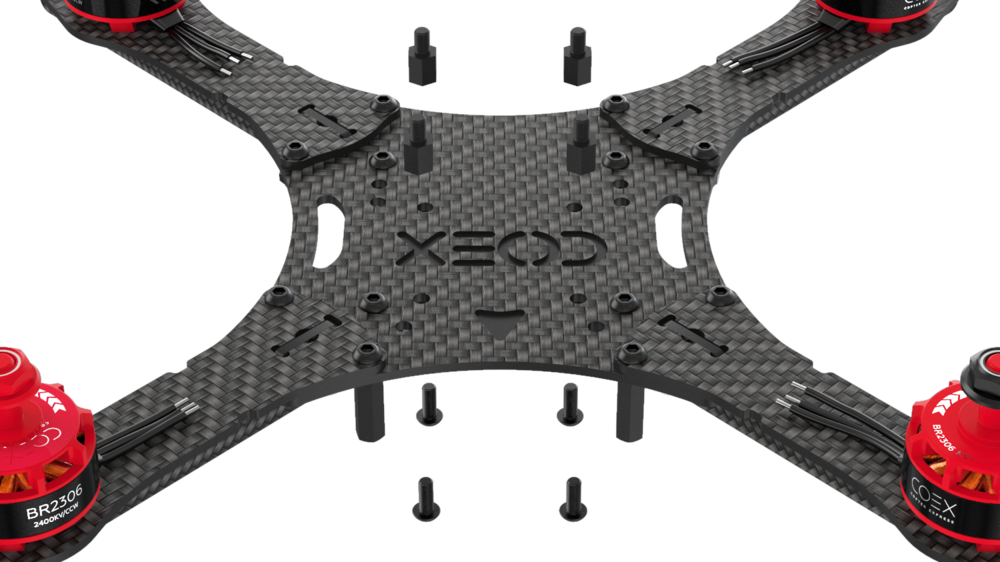
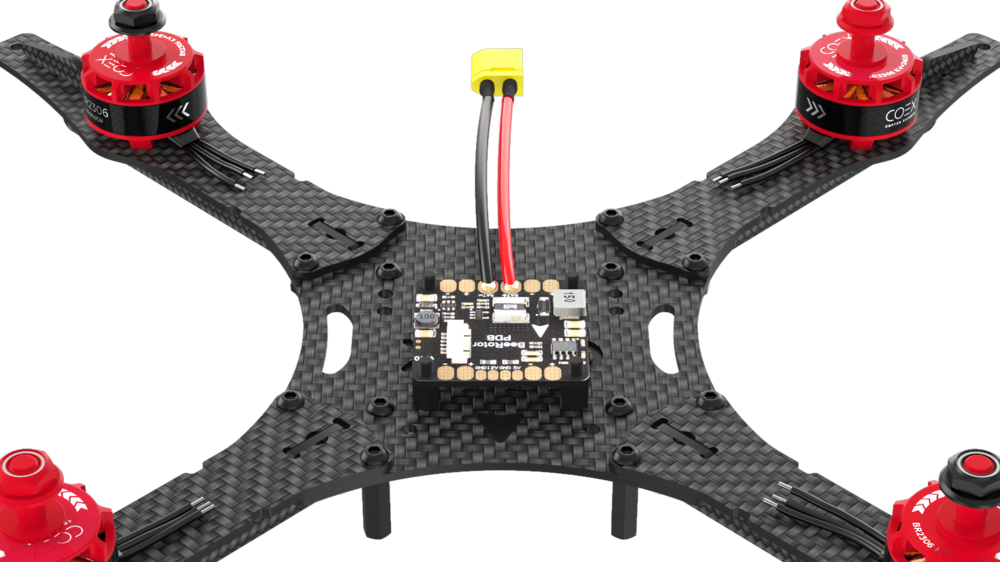
Монтаж PDB
-
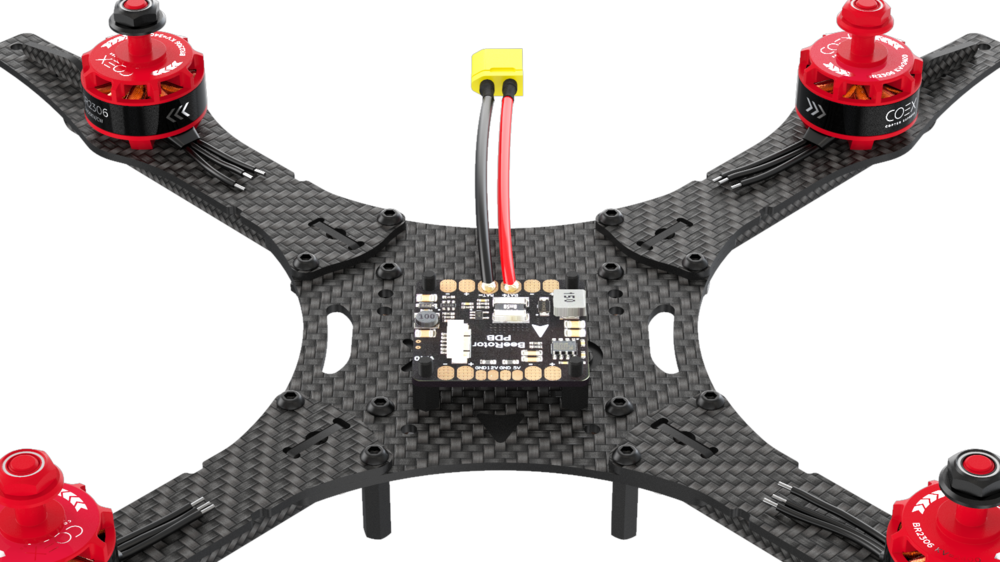
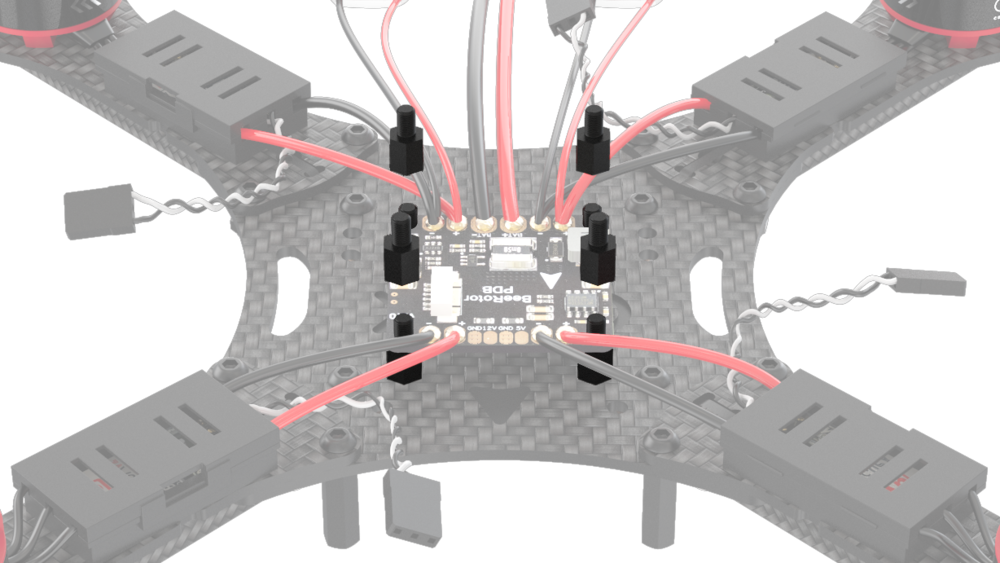
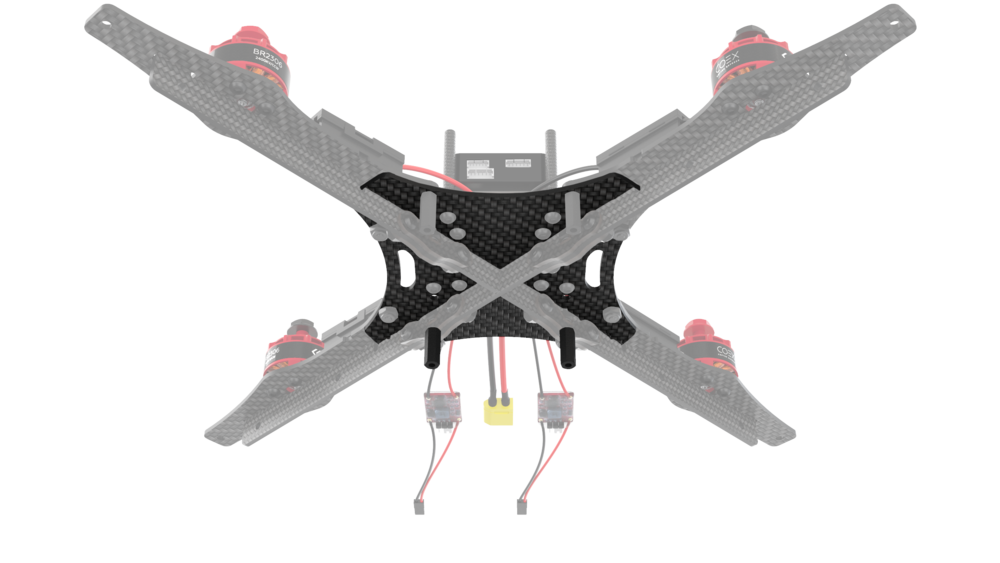
Установите 4 стойки «папа-мама» 6 мм на центральную деку винтами М3х6.
-
Установите PDB на стойки.
-
Стрелки на PDB и центральной деке должны быть направлены в одну сторону.

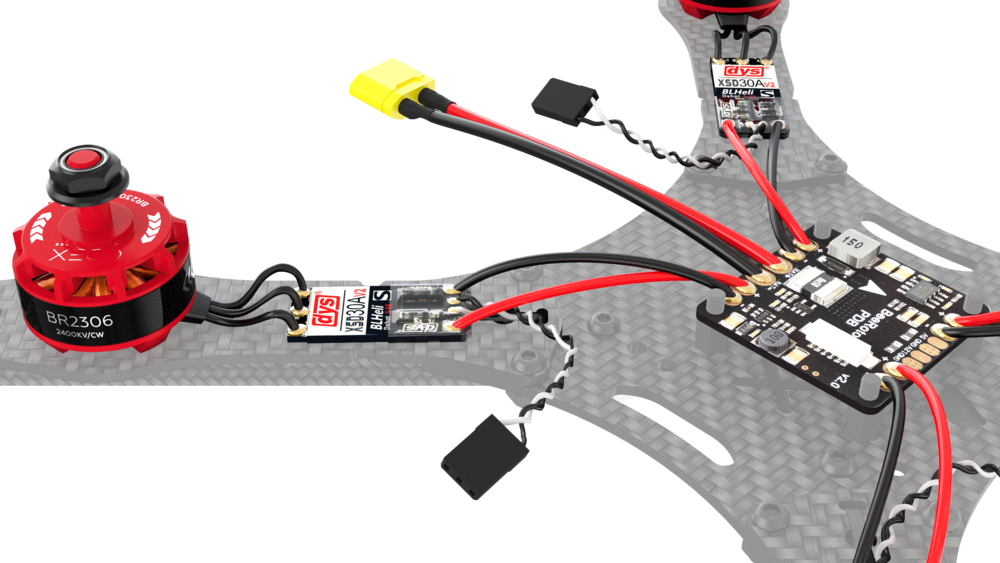
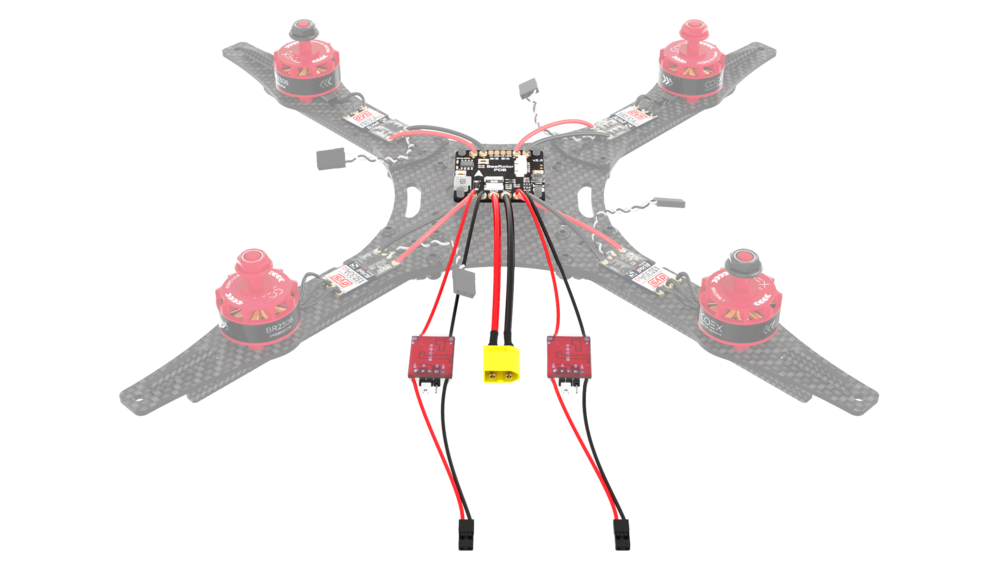
Пайка регуляторов и ВЕС
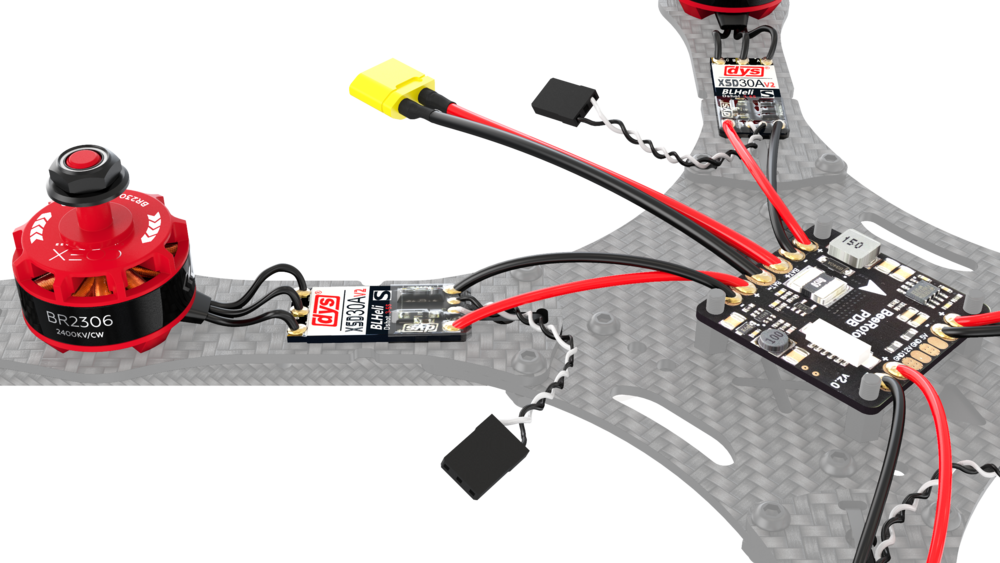
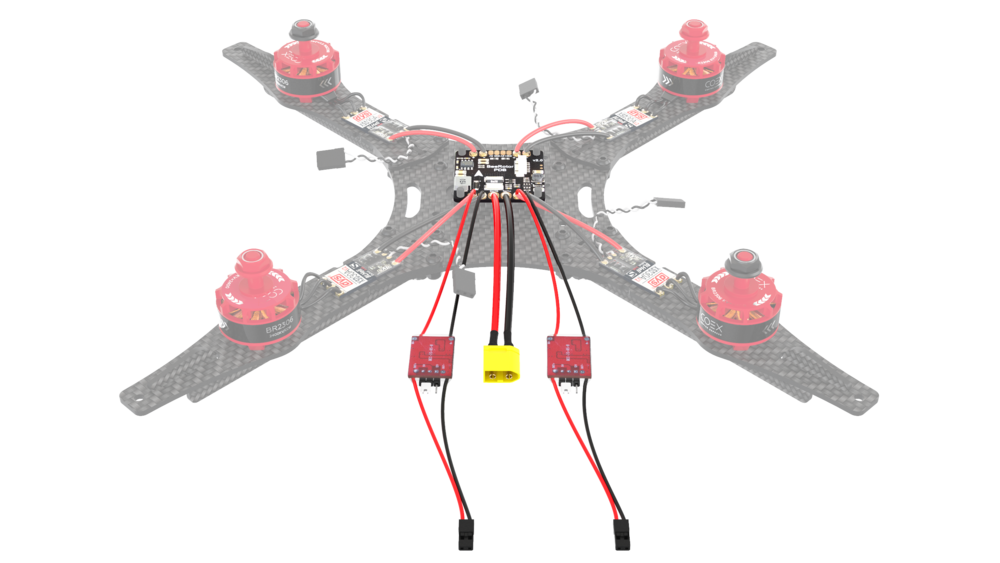
- Припаяйте фазные провода моторов к регуляторам.
-
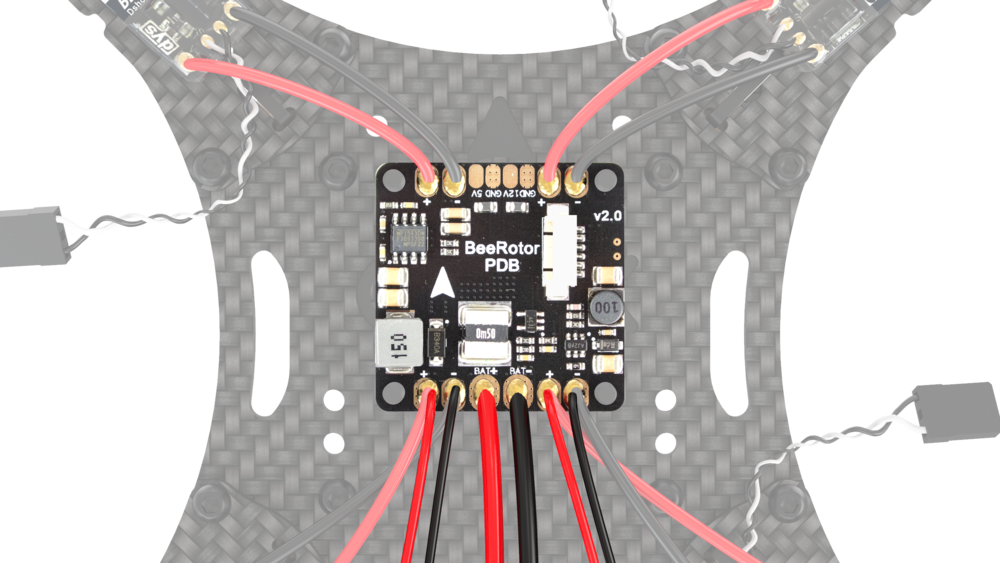
Припаяйте силовые провода регуляторов к контактным площадкам платы (красный к «+», черный к «-»).
-
Припаяйте силовые провода каждого BEC к контактным площадкам одного из регуляторов (красный к «+», черный к «-»).
-
С помощью мультиметра проверьте, что в цепи нет короткого замыкания.
Перевод пульта в режим PWM
Включите пульт с помощью слайдера POWER. Если пульт заблокирован, необходимо перевести все стики в начальное положение:
- Левый стик в центральной нижней позиции.
- Правый стик в центре.
-
Переключатели A, B, C, D в положение «от себя».


Убедитесь, что PPM в меню RX Setup отключен:
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PWM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
Сопряжение приёмника и пульта
- Выключите пульт с помощью слайдера POWER.
- Подключите радиоприемник к разъему BEC 5В. Чёрный провод подключите к одному из нижних пинов, красный — к одному из центральных.
- Установите джампер на вход (B/VCC).
- Подключите АКБ.
-
Светодиод на радиоприемнике должен мигать.
-
Зажмите кнопку BIND KEY на пульте.
-
Включите пульт (перещелкните POWER, не отпуская BIND KEY).
-
Ждите синхронизации.
- Отсоедините джампер.
- Светодиод на приемнике должен гореть непрерывно.



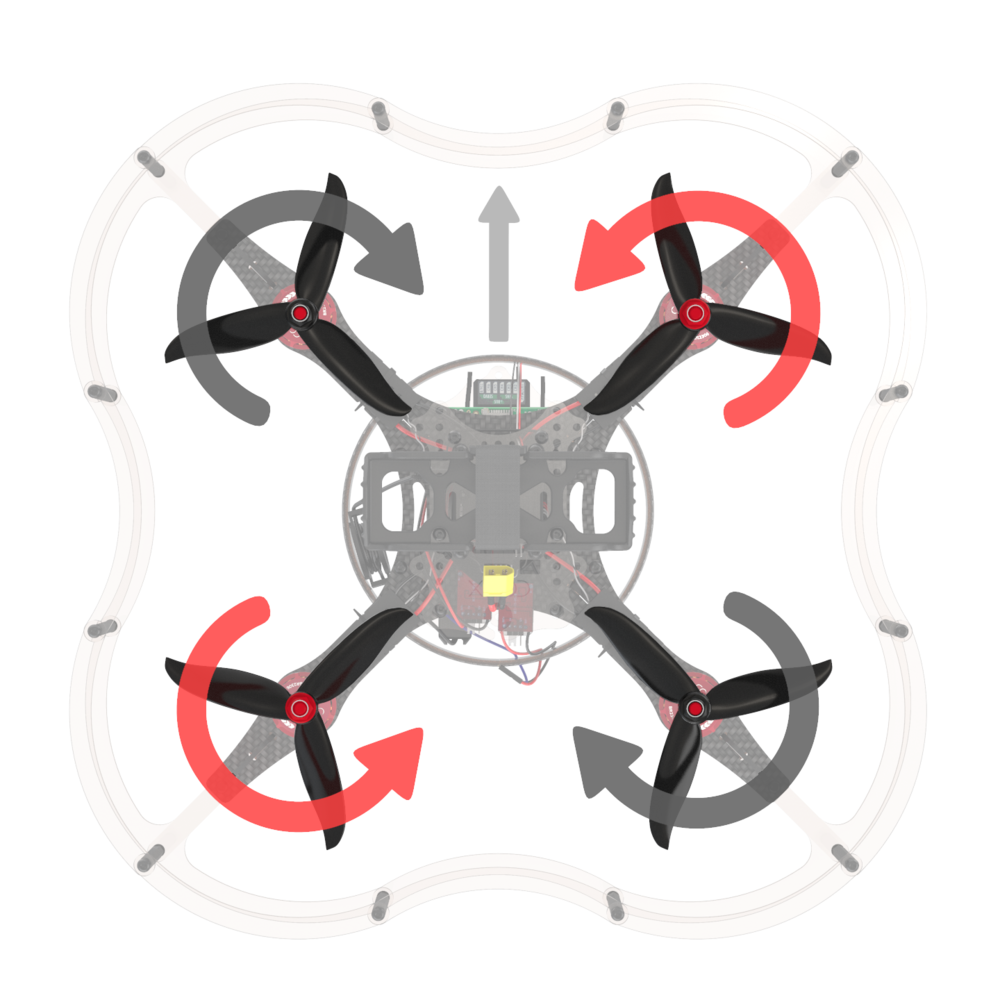
Проверка направления вращения моторов
Моторы с красными гайками должны вращаться против часовой стрелки, с чёрными — по часовой стрелке. Правильные направления вращения также указаны на самих моторах. Для проверки направления вращения можно использовать сервотестер или радиоприёмник с пультом.
- Отключите АКБ и пульт.
- Подключите сигнальный провод от ESC к выходу CH3 на приёмнике. Белый провод должен подходить к верхнему пину, чёрный — к нижнему.
- Включите пульт. Левый стик должен быть в нижнем положении.
- Подключите АКБ.
- Медленно поднимайте левый стик до тех пор, пока мотор не начнёт вращаться.
Если мотор вращается в неправильную сторону, поменяйте местами два любых фазных провода.
Направление вращения также можно изменить программно. Процесс описан в статье про прошивку ESC.
Повторите процесс для каждого мотора.
Перевод пульта в режим PPM
Полётный контроллер не может работать с пультом в режиме PWM, поэтому следует произвести перевод пульта в режим PPM.
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PPM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
Установка пластины для полётного контроллера
-
Установите 4 стойки «папа-мама» 6 мм на PDB.
-
Подключите шлейф питания к PDB.
-
Установите поликарбонатную пластину на стойки и зафиксируйте нейлоновыми гайками.
Установка полётного контроллера
-
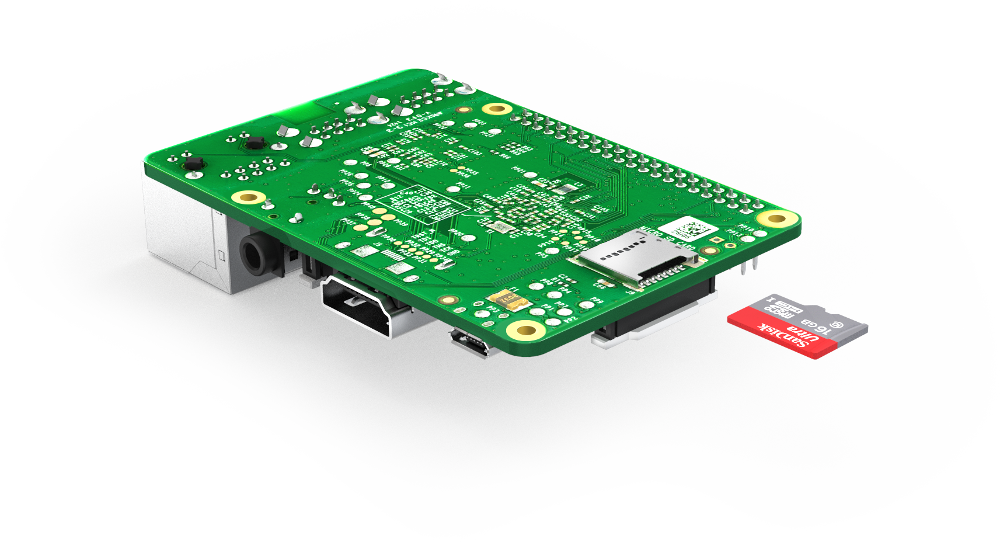
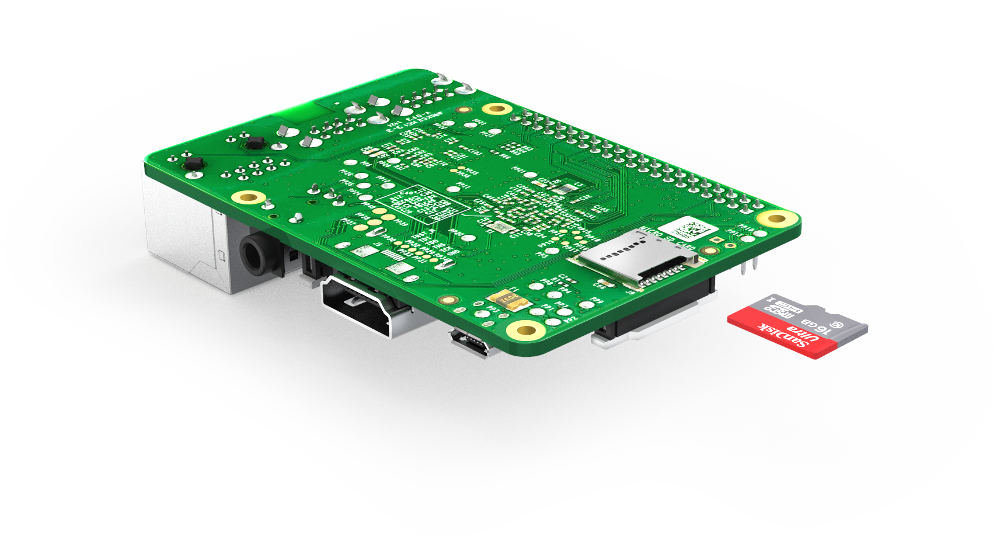
Вставьте карту microSD в полётный контроллер.
-
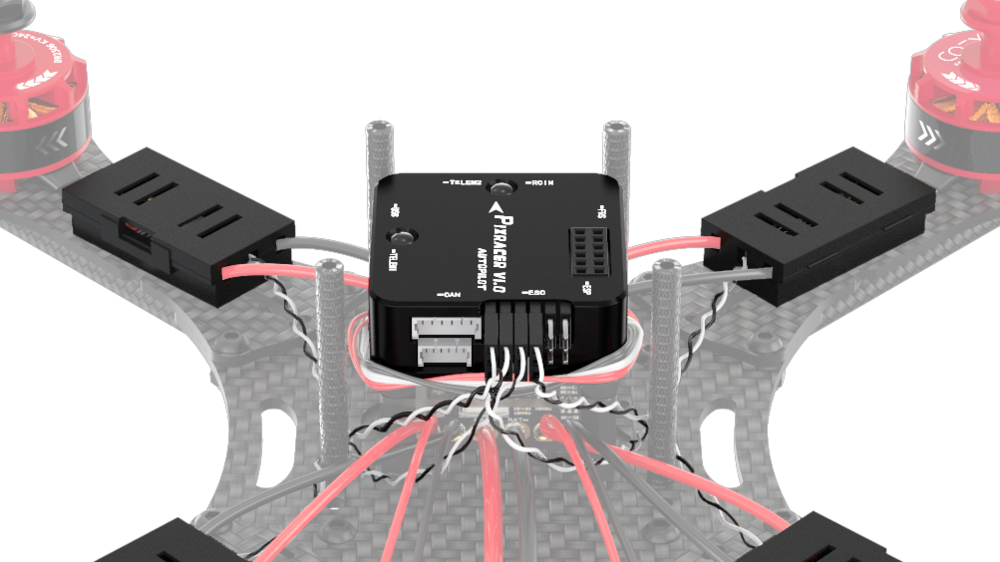
Установите полетный контроллер на пластину с помощью двухстороннего скотча.
-
Стрелки на полетном контроллере и центральной деке должны быть направлены в одну сторону.
-
Подключите шлейф питания PDB к разъему «POWER» полетного контроллера, закрутив его в «косичку» для взаимной фиксации проводов.
-
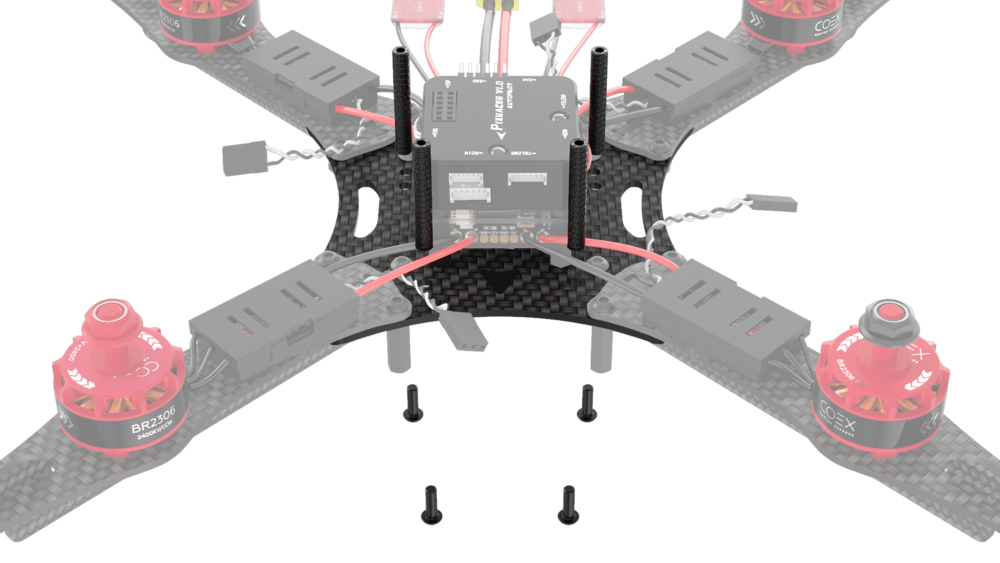
Установите 4 алюминиевые стойки 40 мм с помощью винтов М3х10.
-
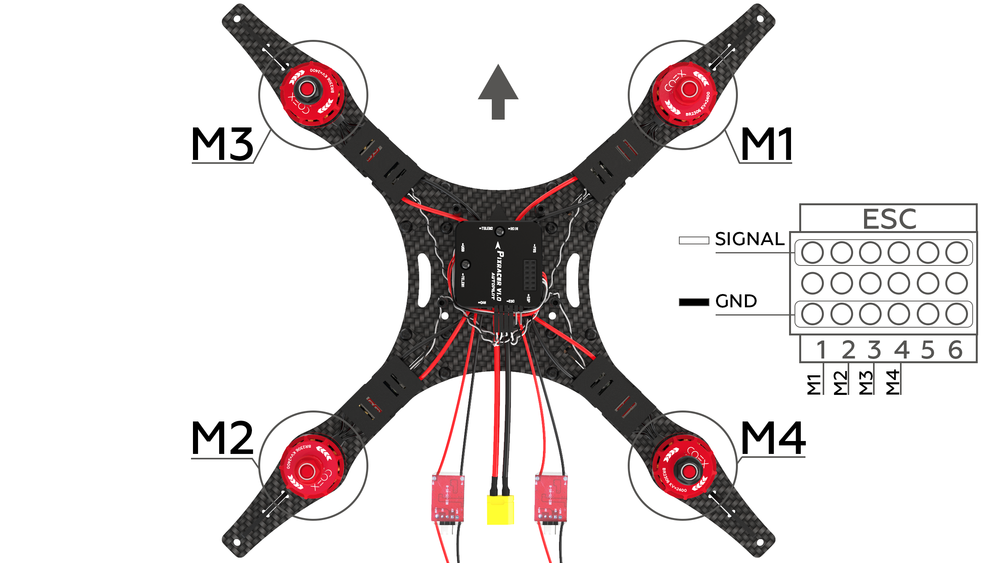
Подключите сигнальные провода регуляторов к полетному контроллеру следующим образом:
-
Установите 2 стойки «мама-мама» 15 мм на центральную деку с помощью винтов М3х8.
-
Другие 2 стойки были установлены ранее в разделе «Сборка рамы», п. 2.




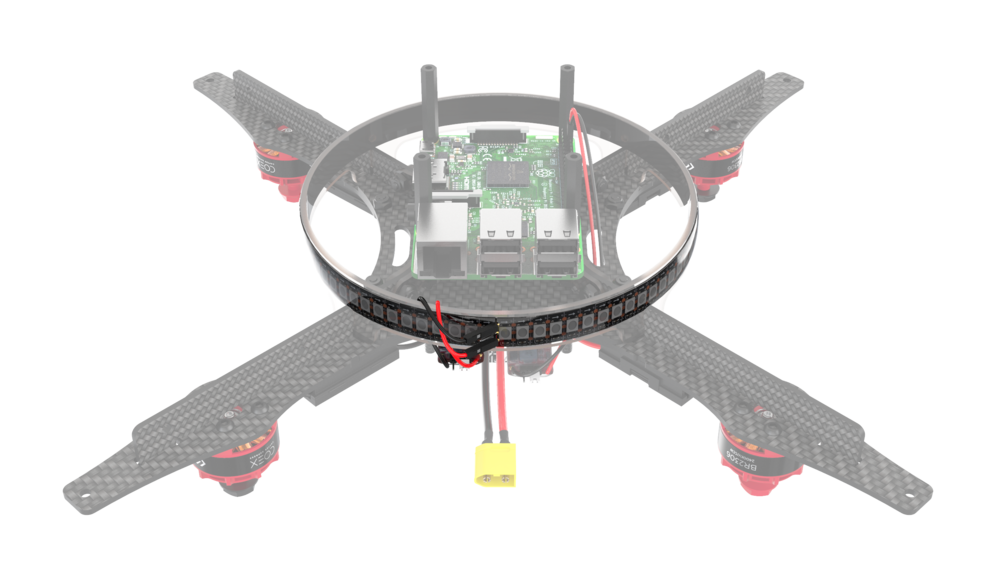
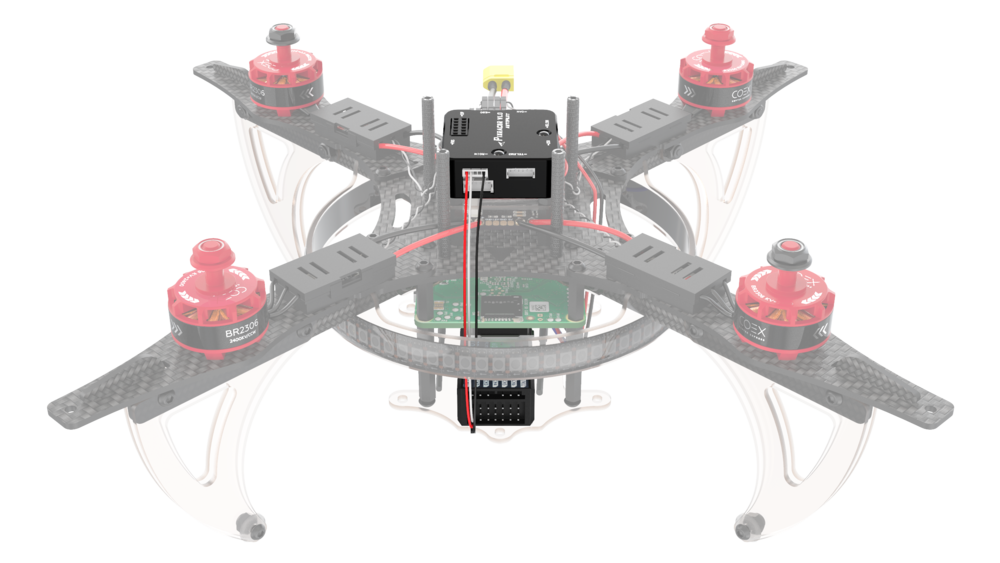
Установка обруча для светодиодной ленты
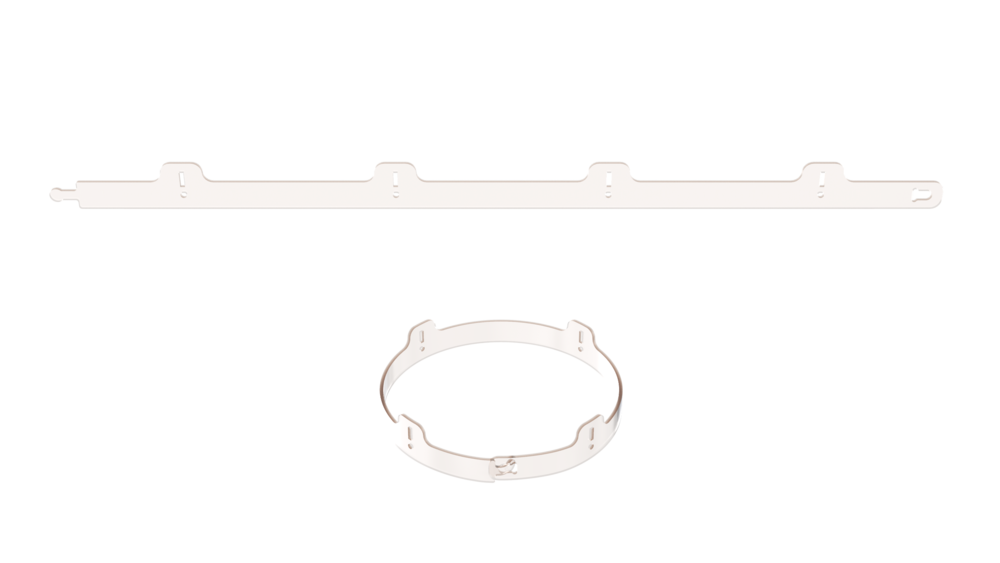
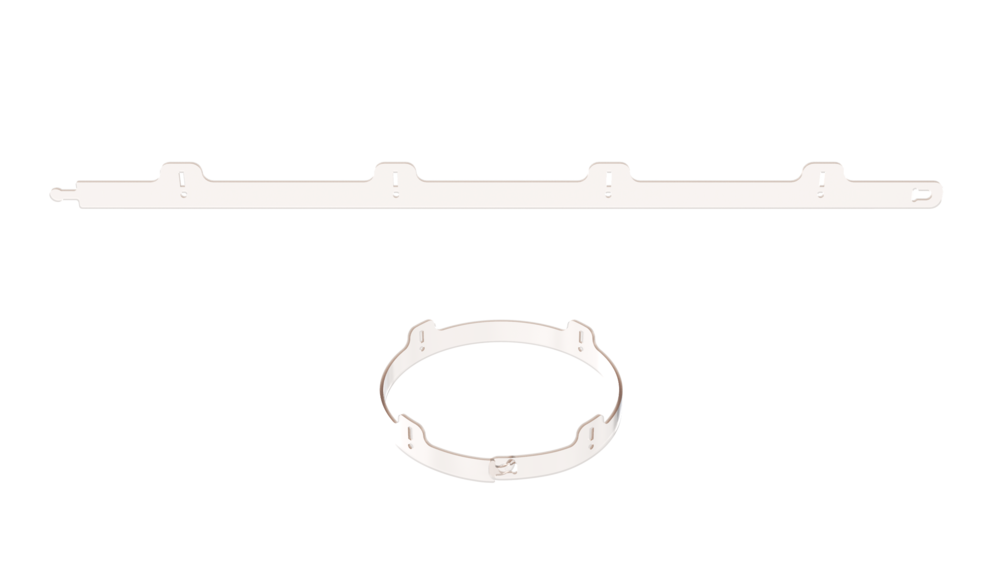
- Согните поликарбонатную заготовку в обруч и зафиксируйте ее концы в замке.
-
Установите обруч на раму, используя пазы.

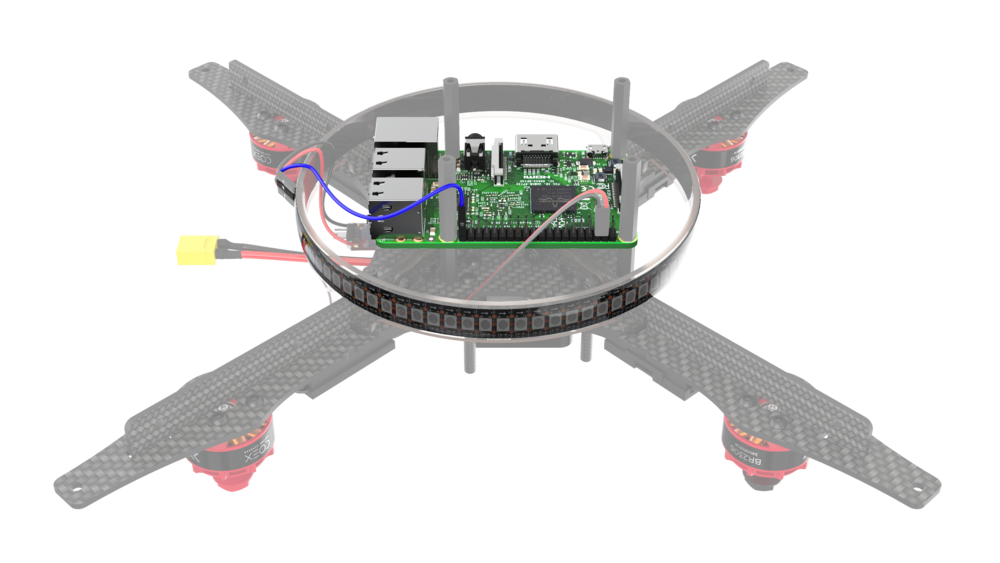
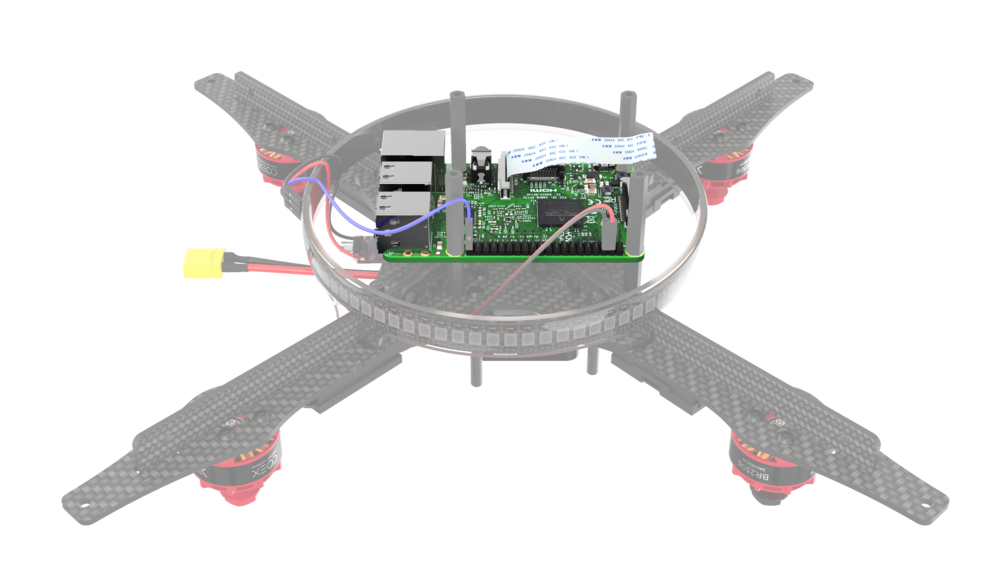
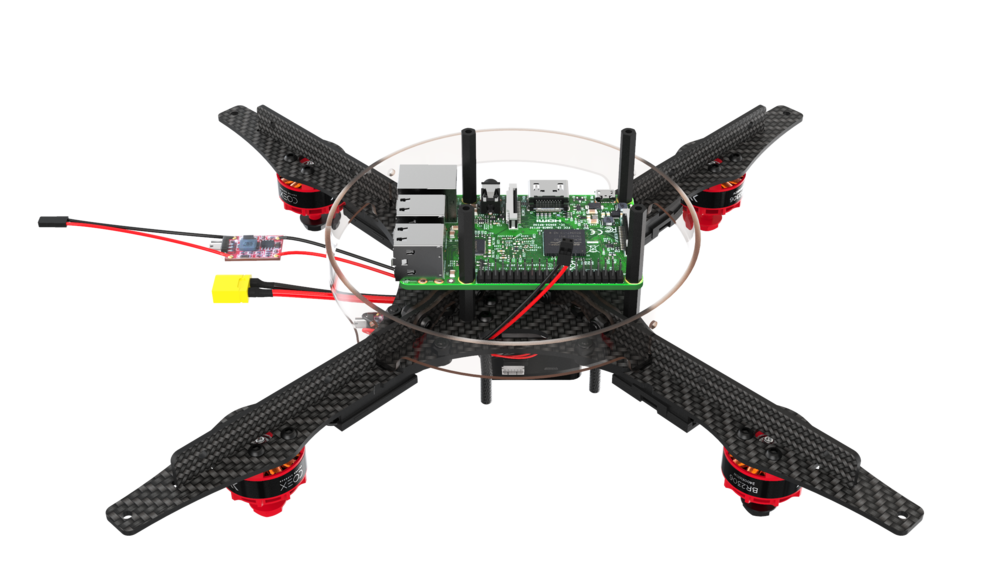
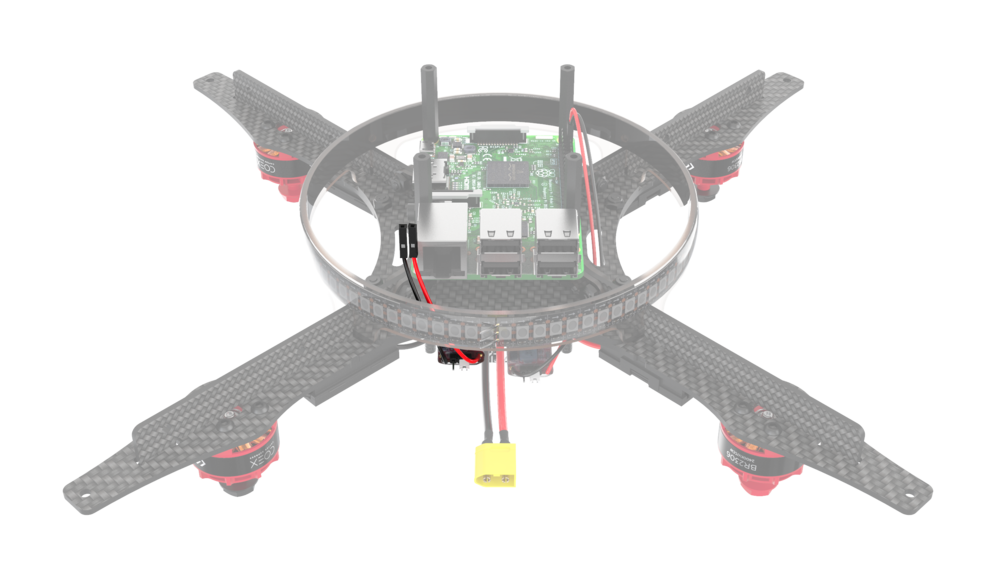
Установка Raspberry Pi
-
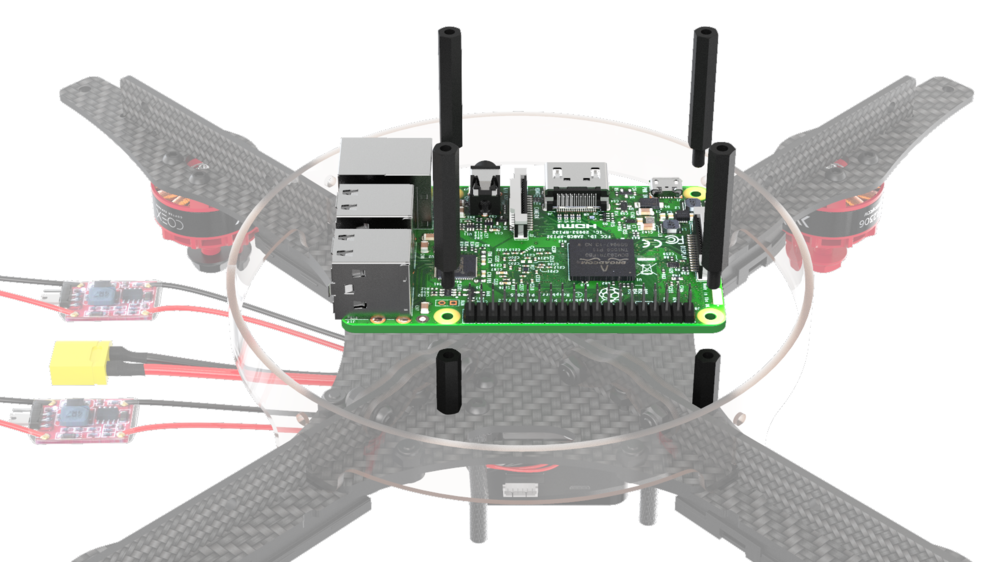
Вставьте карту microSD с записанным образом в Raspberry Pi
-
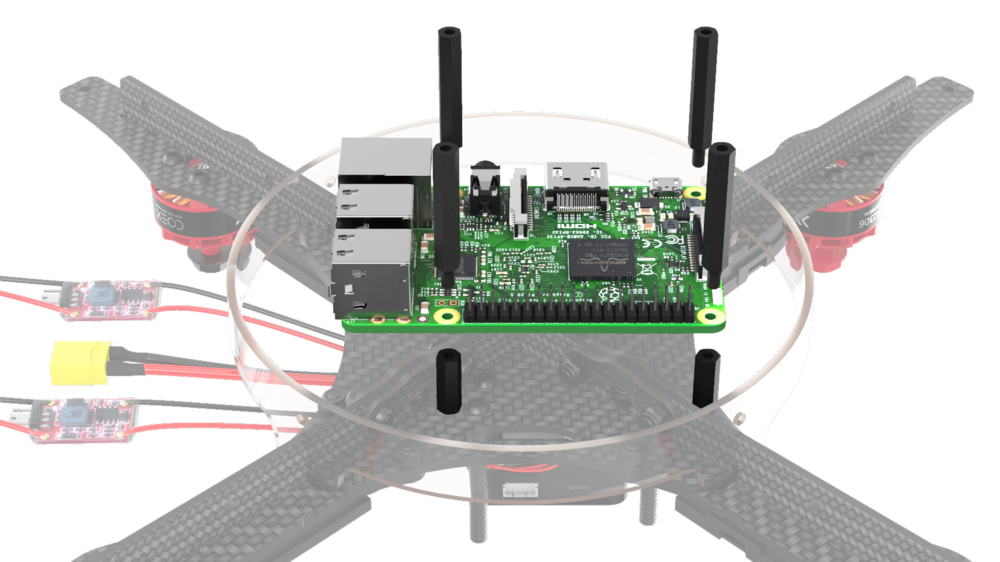
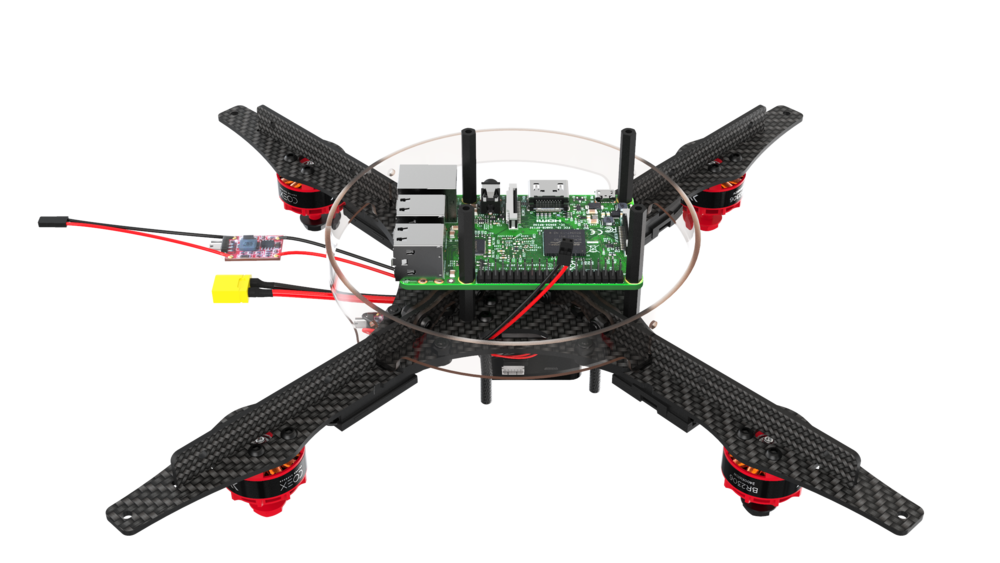
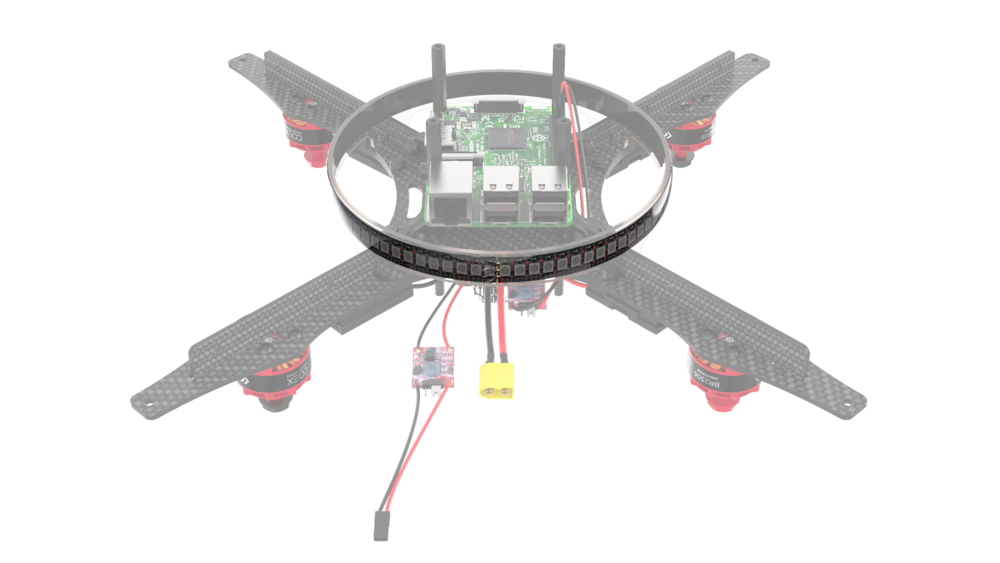
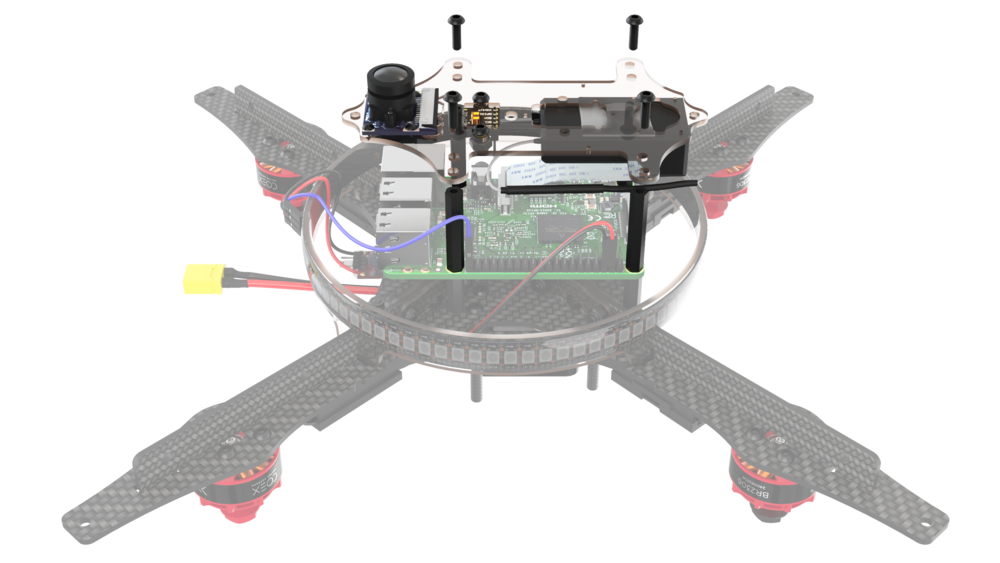
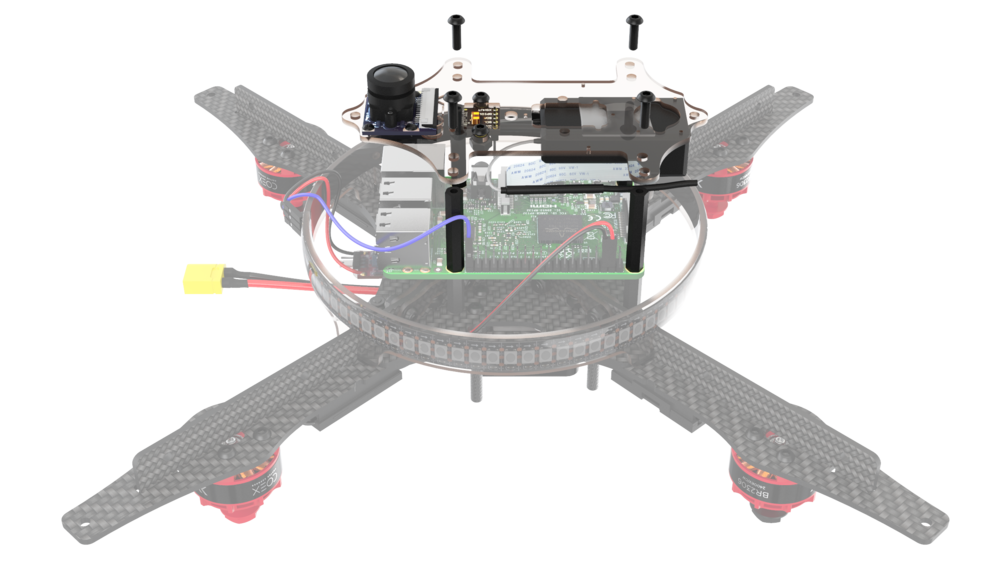
Установите плату Raspberry Pi на стойки, используя 4 стойки «папа-мама».
-
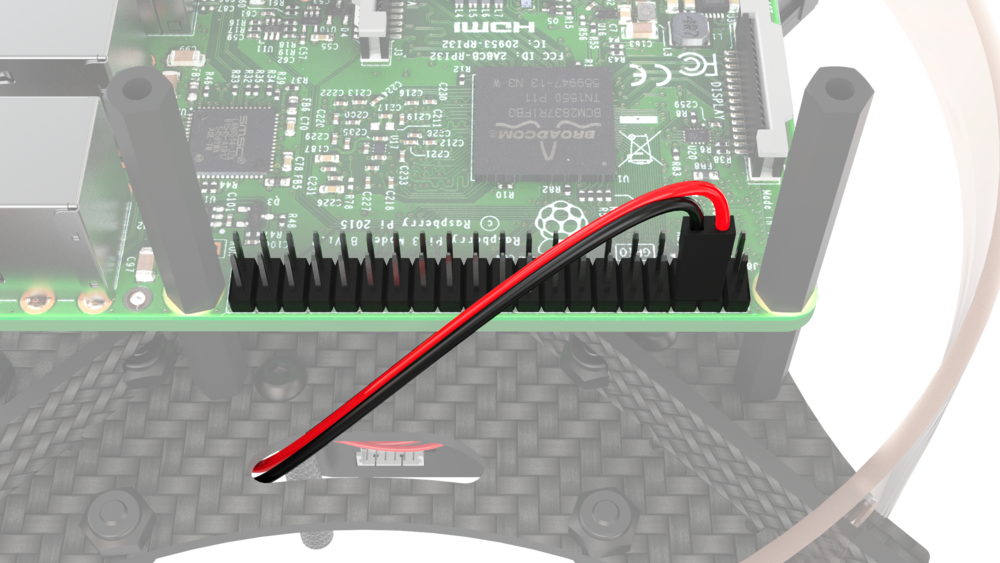
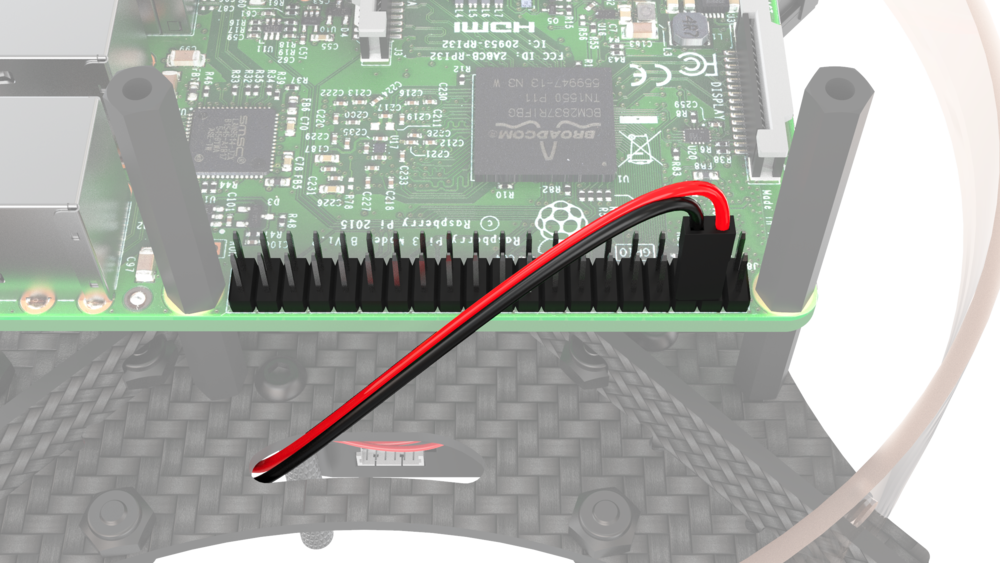
Протяните провода от BEC через паз в центральной раме.
-
Подключите провод питания от BEC к Raspberry, согласно схеме:
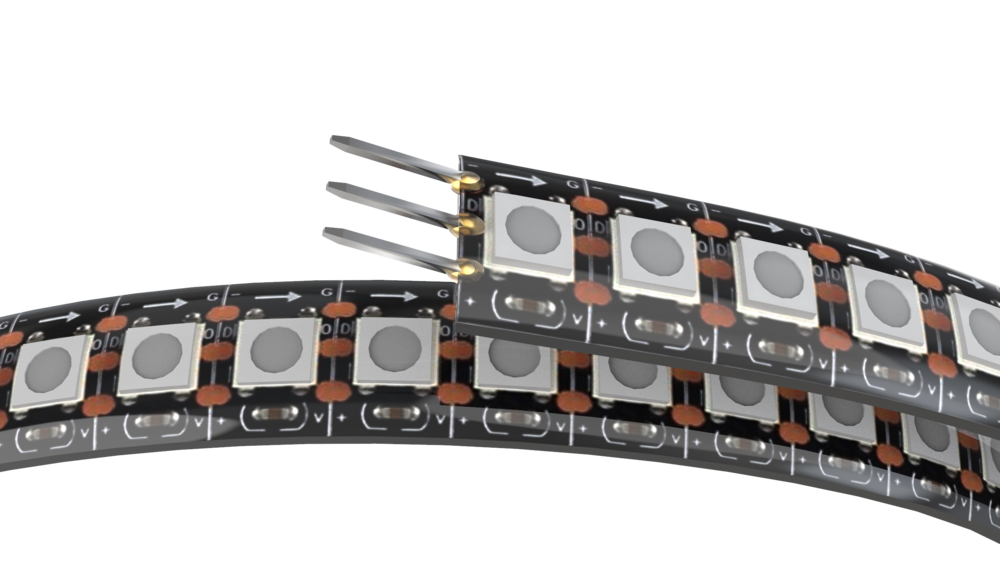
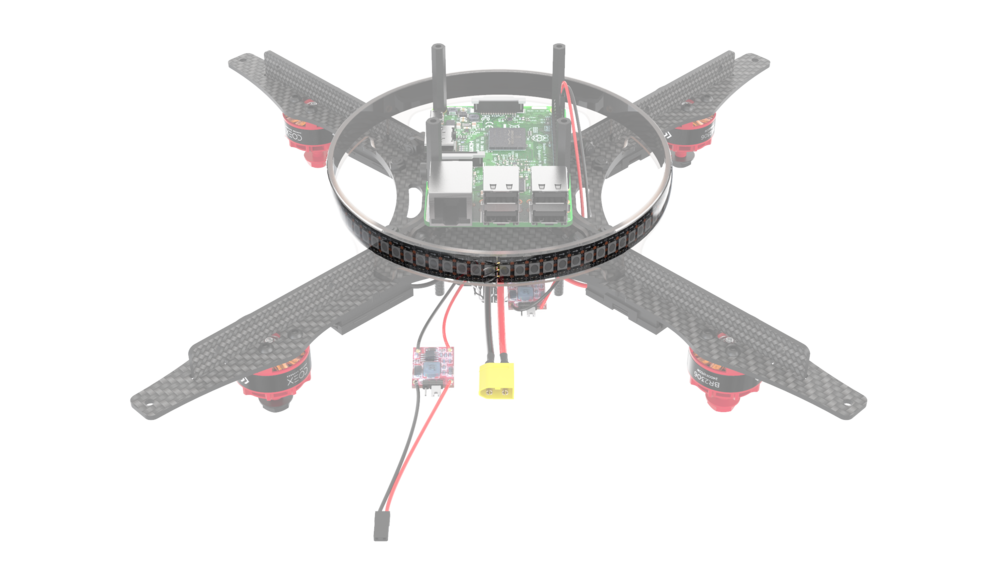
Установка светодиодной ленты на обруч
-
Проверьте наличие напаянных пинов на контактах ленты (при отсутствии — напаять).
-
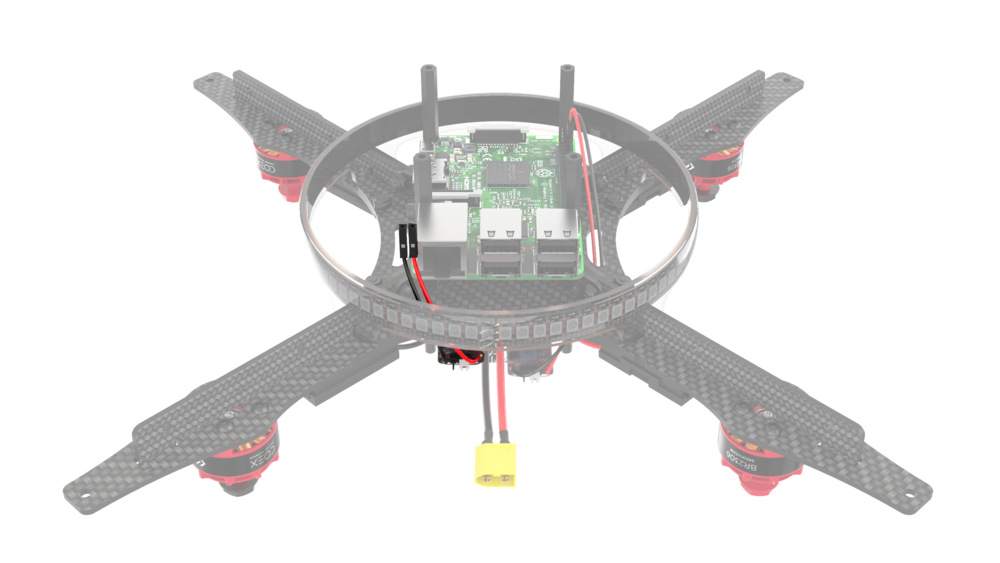
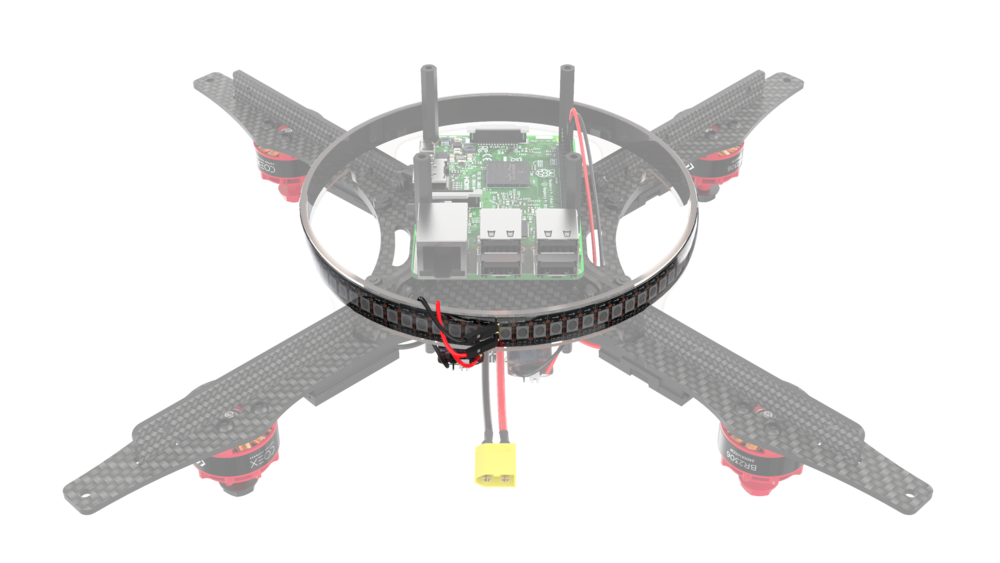
Установите светодиодную ленту на обруч (используя клеевой слой на ленте) так, чтобы контакты были в задней части коптера. Для дополнительной фиксации используйте стяжки.


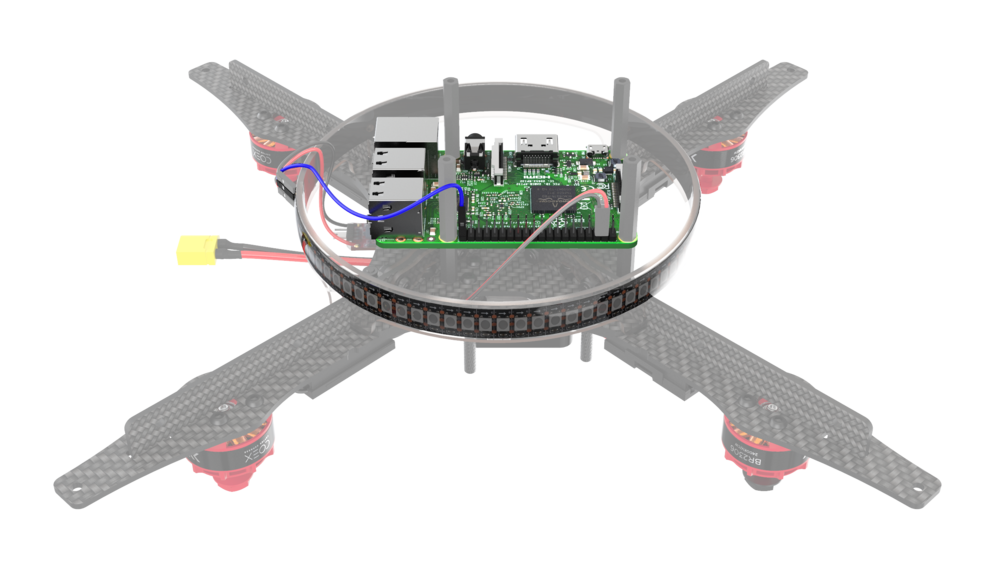
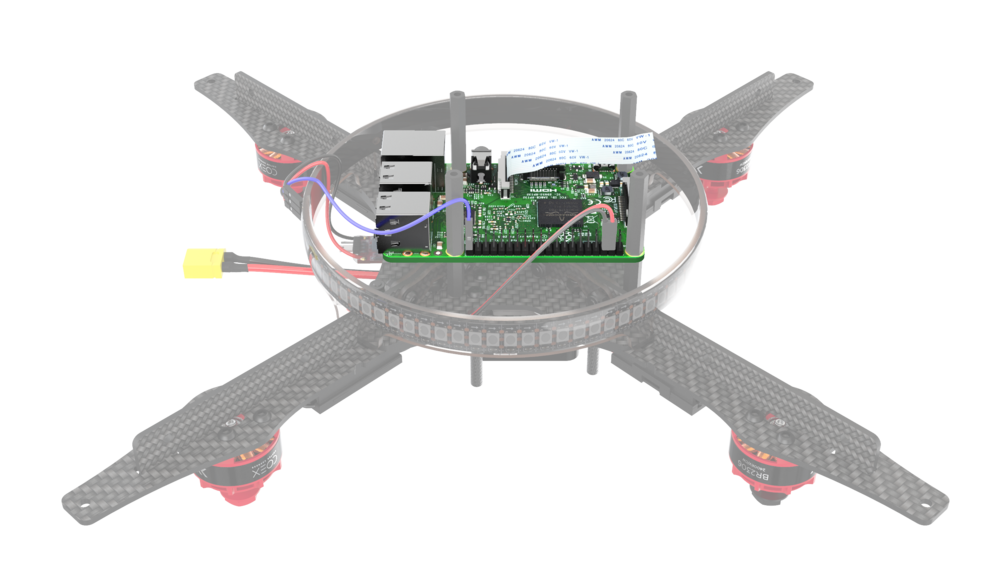
Подключение светодиодной ленты к Raspberry Pi
-
Питание для ленты берется от второго BEC. Подключите контакты «-» и «+» к Ground и 5v на ленте соответственно.
-
Подключите контакт D к GPIO-пину на Raspberry. Рекомендуется использовать пин GPIO21.
Установка шлейфа для камеры
- Поднимите защелку.
- Подключите шлейф.
- Закройте защелку.
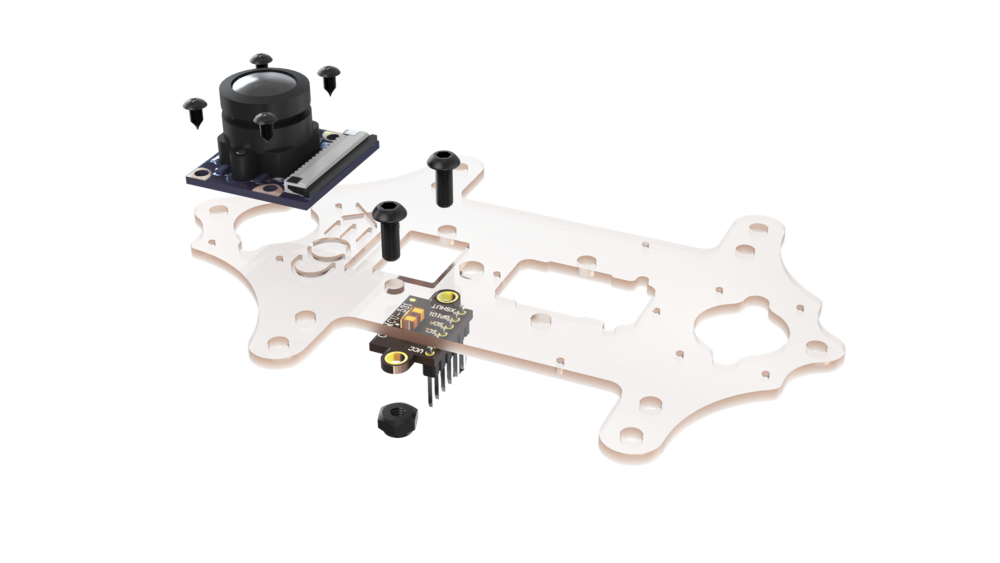
Установка оборудования на нижнюю монтажную деку
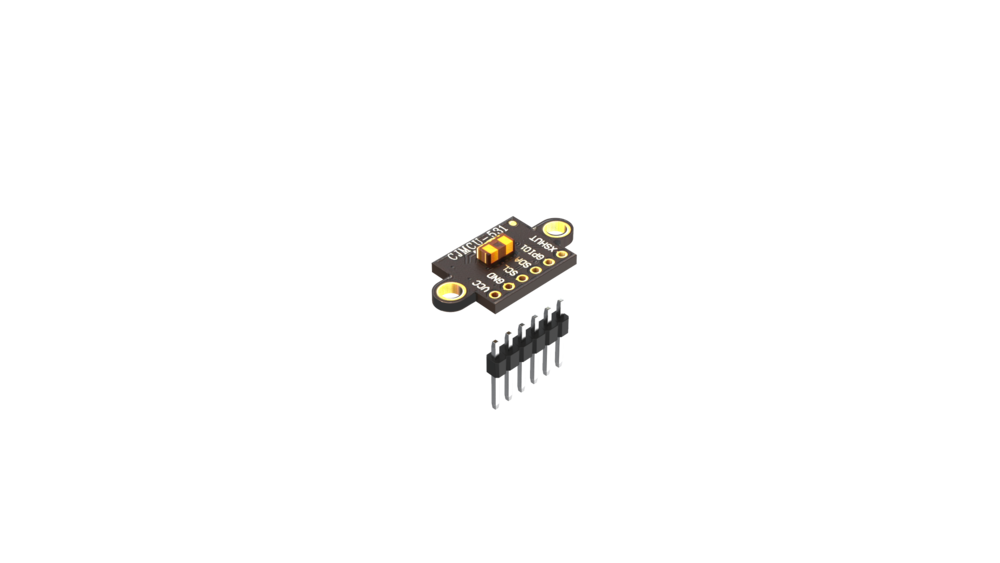
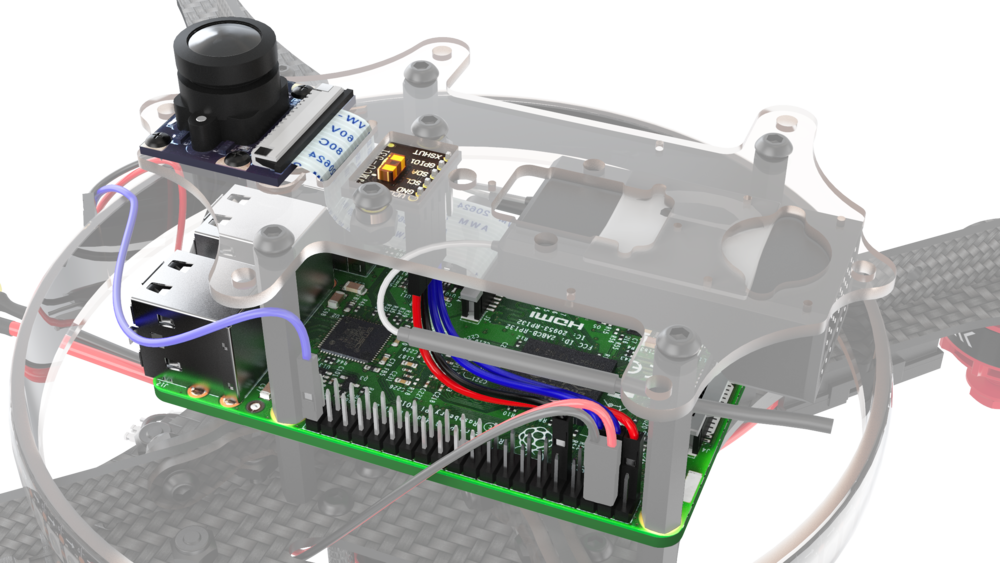
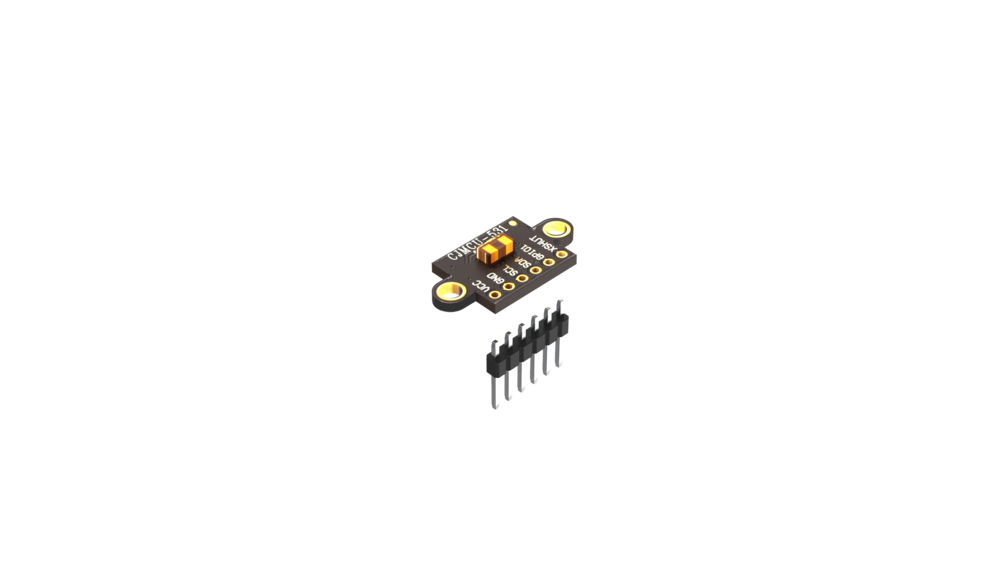
- Подготовьте лазерный дальномер к монтажу, предварительно напаяв на него контакты.
-
Установите камеру на 4 самореза 2х5.
Убедитесь, что саморезы не касаются деталей на печатной плате камеры. В противном случае камера может не заработать.
-
Установить на деку лазерный дальномер с помощью 2 винтов М3х8 и стальных гаек.
-
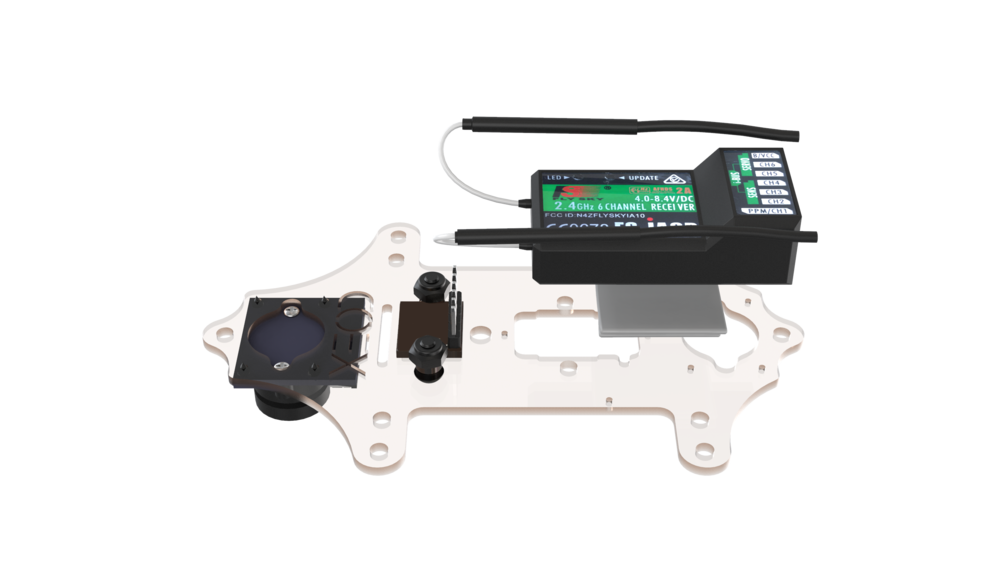
Установите приемник на нижнюю деку с помощью двухстороннего скотча.
-
Установите нижнюю деку с помощью 4 винтов М3х10.
-
Подключите шлейф к камере.
-
Подключите лазерный дальномер к Raspberry Pi с помощью проводов типа «мама-мама»:
- Разъем VCC к пину 1 (3.3v).
- Разъем GND к пину 9 (Ground).
- Разъем SDA к пину 3 (GPIO02).
-
Разъем SCL к пину 5 (GPIO03).
Монтаж ножек
-
Установите 8 ножек с помощью винтов М3х10 и стальных гаек.
-
Установите демпфирующие прокладки на ножки с помощью винтов М3х10 и стальных гаек.
Подключение кабелей
-
Подключите кабель радиоприемника в RCIN разъем полетного контроллера.
-
Подключите кабель к приемнику, соответственно изображению.


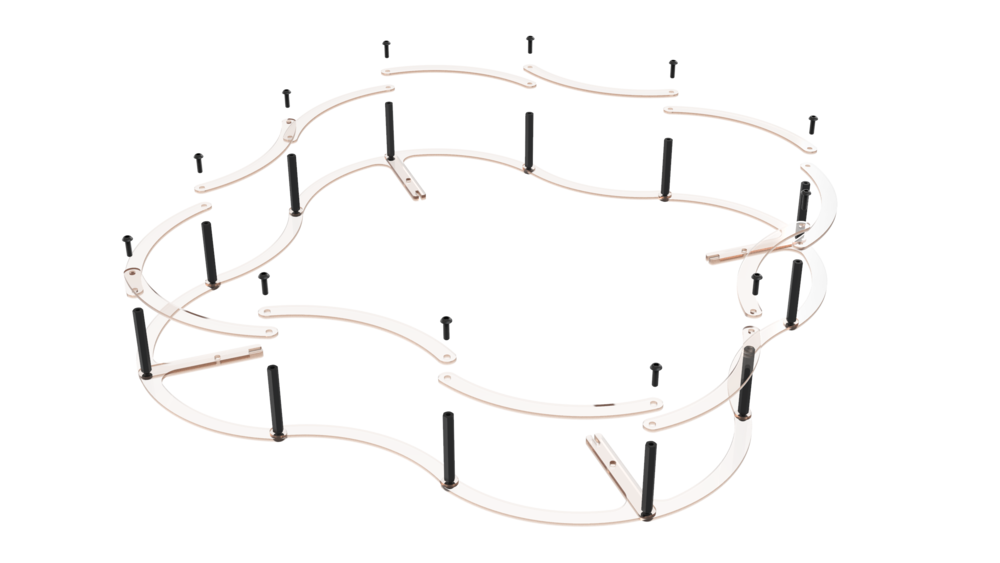
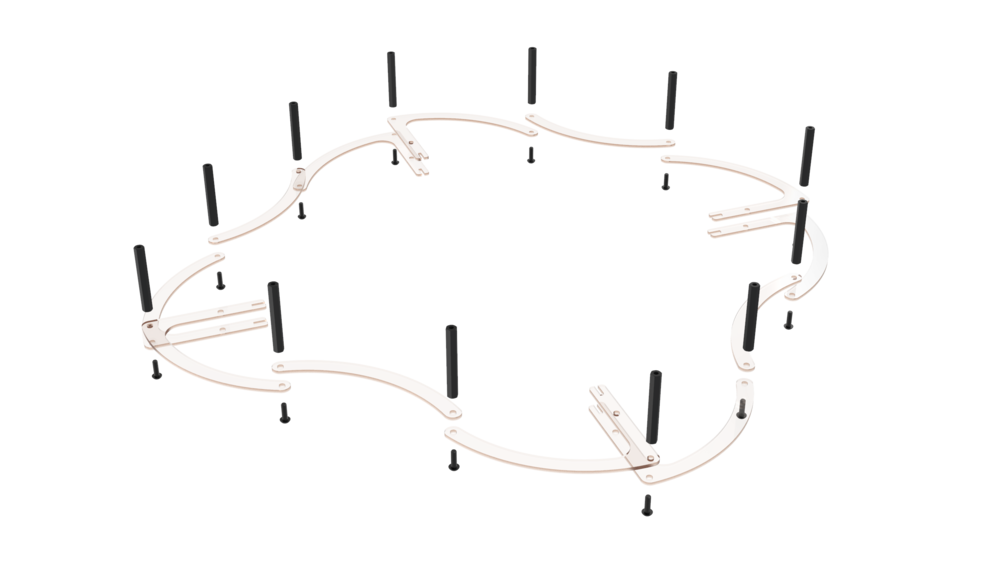
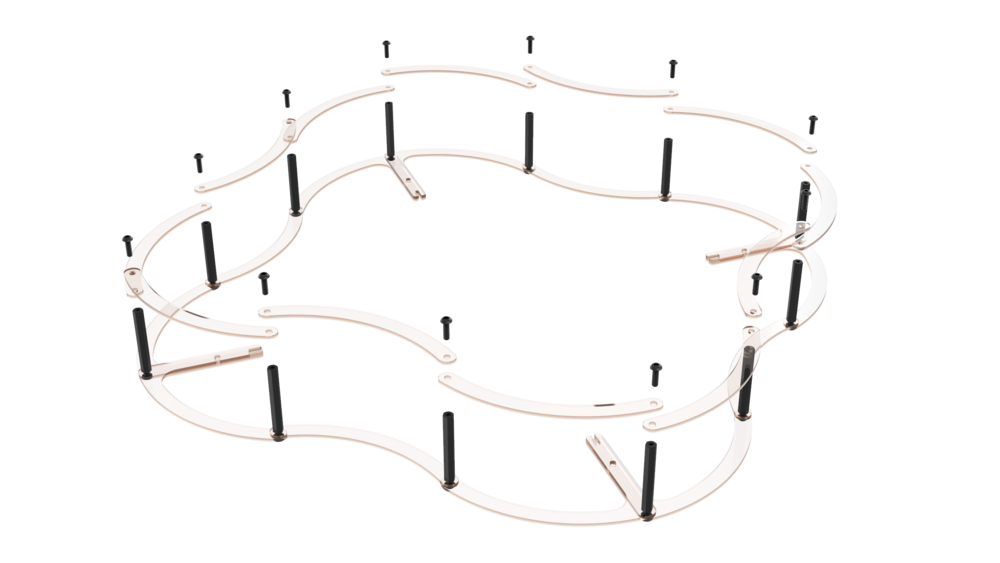
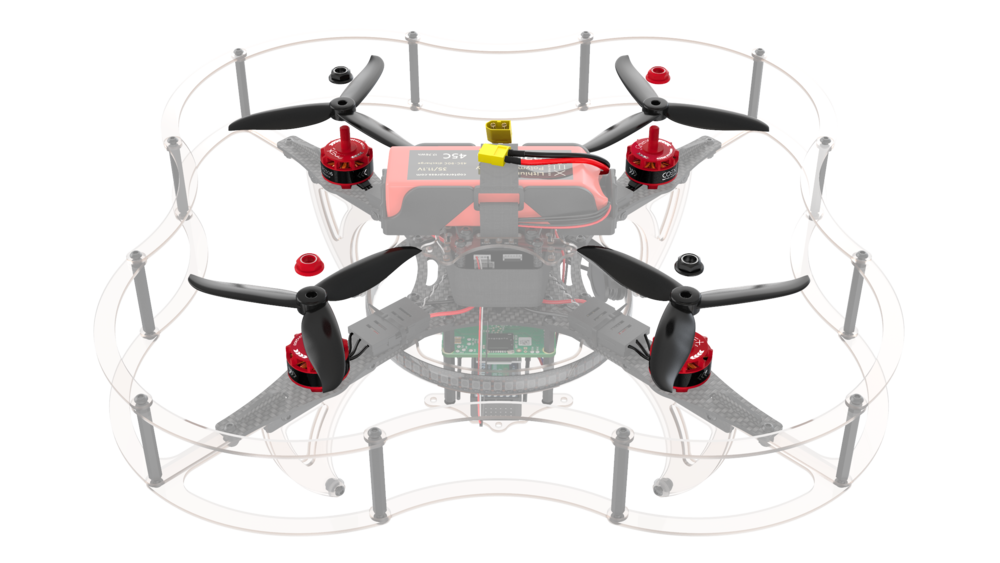
Сборка защиты винтов
-
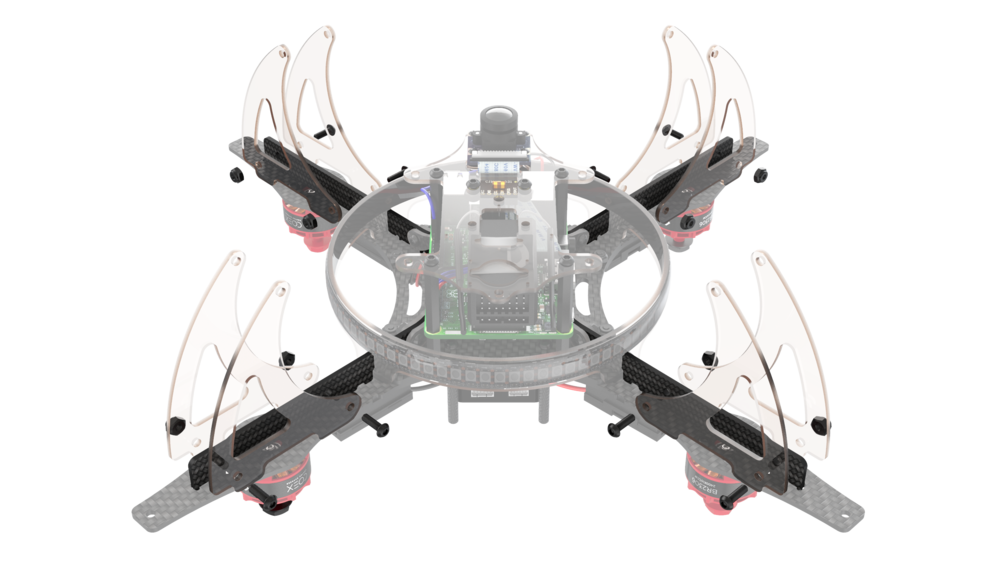
Соберите нижнюю часть защиты, используя 12 винтов М3х10 и 12 нейлоновых стоек 40 мм.
-
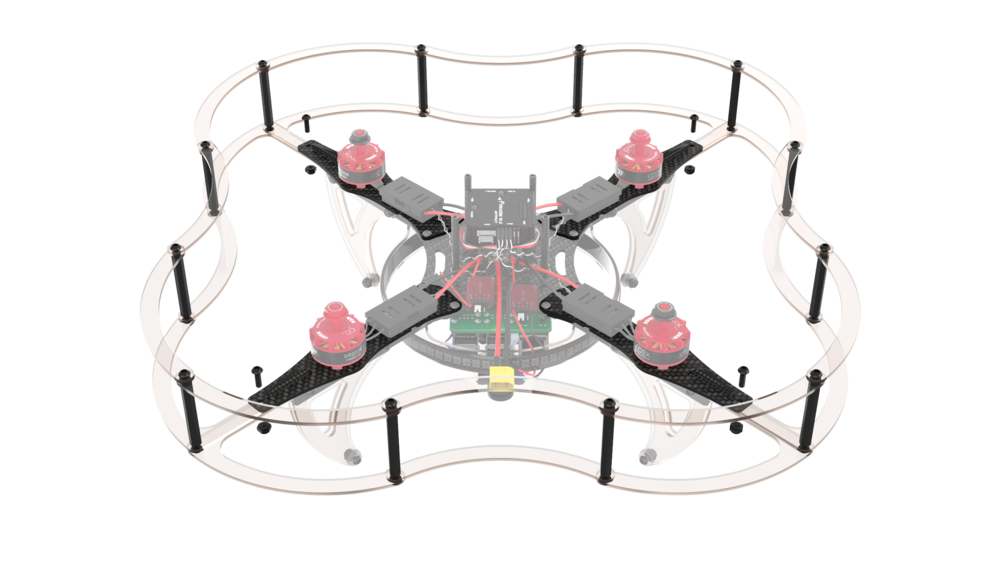
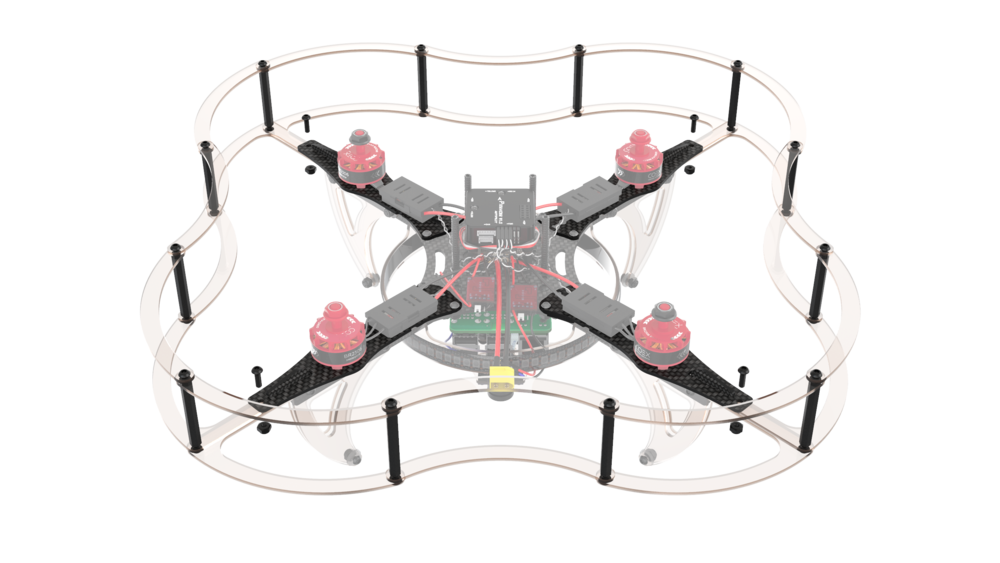
Установите верхнюю часть, используя 12 винтов М3х10.
-
Установите защиту на коптер, с помощью 4 винтов М3х10 и стальных гаек.

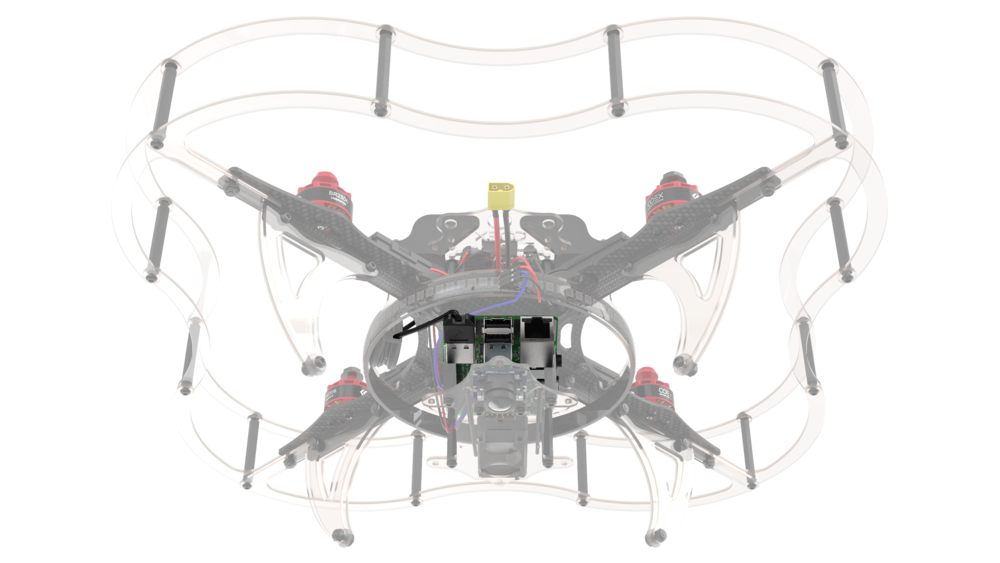
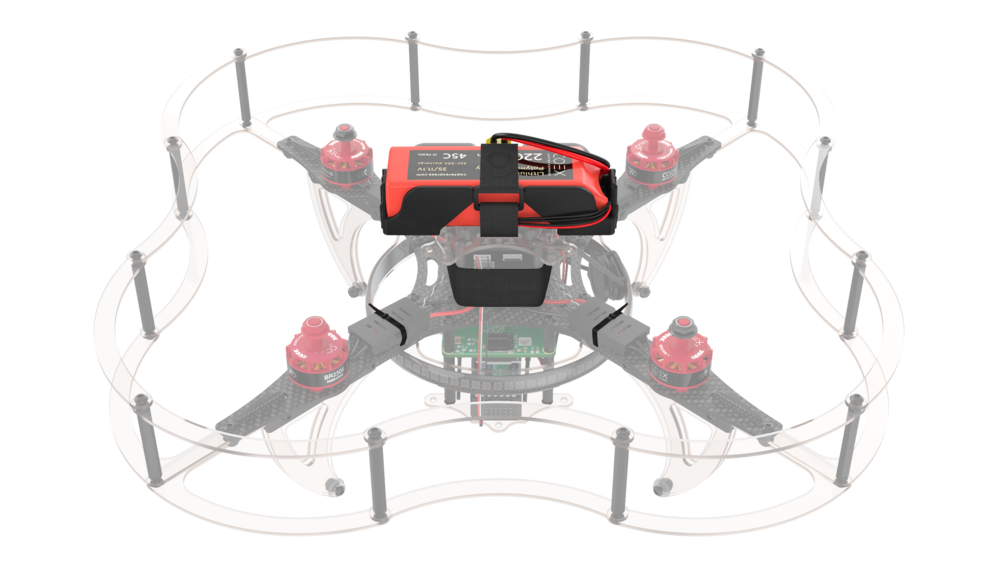
Установка верхней деки на коптер
- Установите на верхнюю деку держатель АКБ с помощью 4 винтов М3х8 и стальных гаек.
- Проденьте в пазы ремешок для фиксации АКБ.
-
Установите верхнюю деку на коптер с помощью 4 винтов М3х10.
-
Подключите USB кабель к разъему на полетном контроллере и USB разъему Raspberry Pi.
-
Зафиксируйте «улитку» кабеля в удобном месте с помощью двухстороннего скотча так, чтобы провод не мешал вращению винтов.

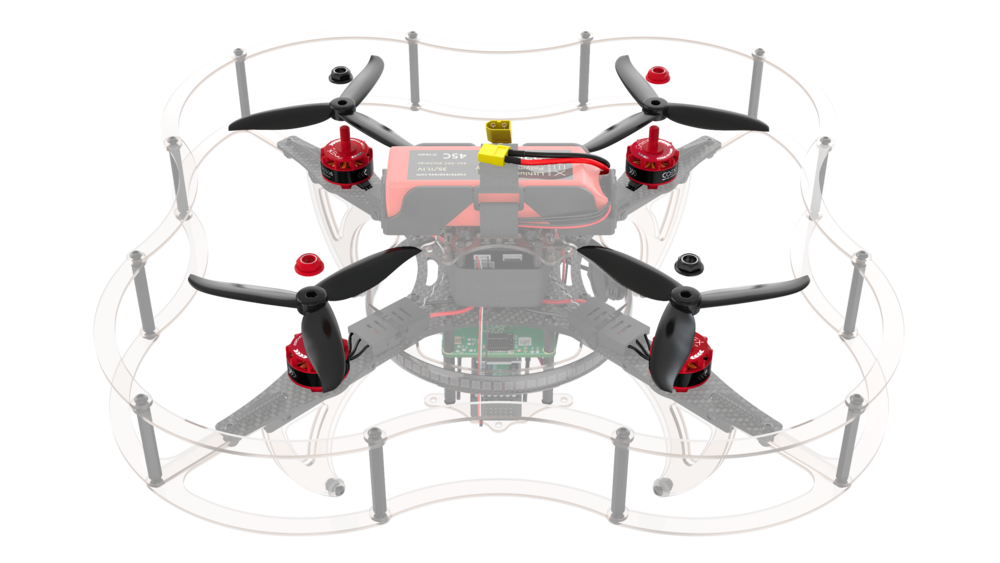
Установка пропеллеров и подготовка к полёту
Произведите настройку компонентов квадрокоптера, используя раздел «Настройка».
Установка пропеллеров должна производиться только после окончательной настройки коптера, непосредственно перед полетом.
Установите 4 пропеллера, согласно схеме вращения. При установке пропеллеров АКБ должна быть отключена.
При установке будьте внимательны, чтобы пропеллер не был перевернут. На лицевой стороне пропеллера имеется маркировка его характеристик, а также направление вращения, которое должно совпадать с направлением вращения моторов.
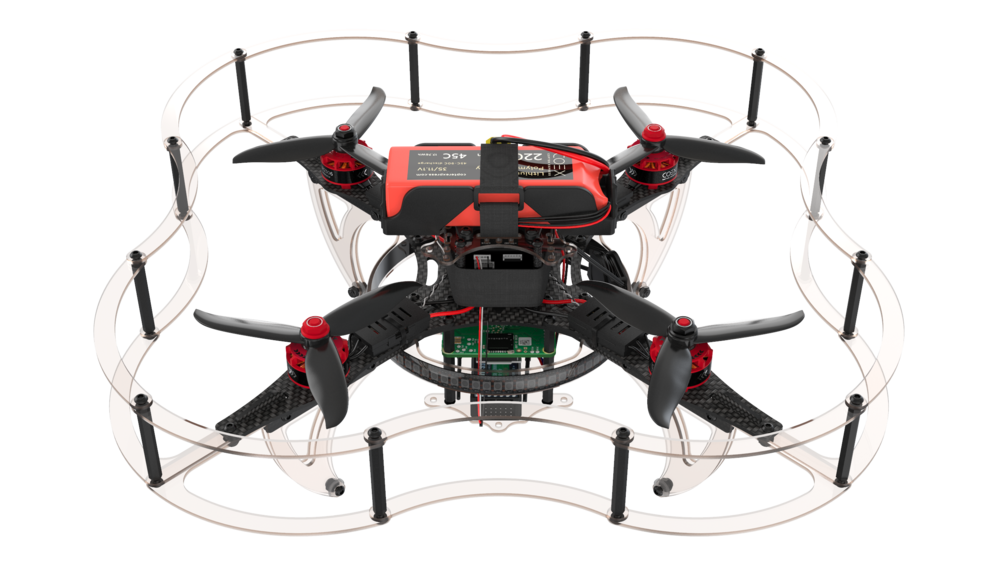
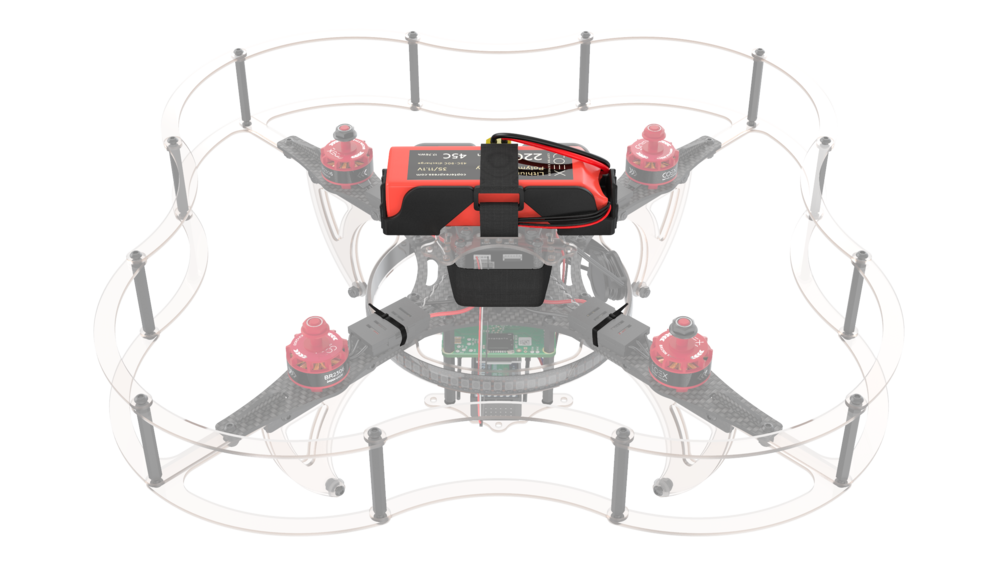
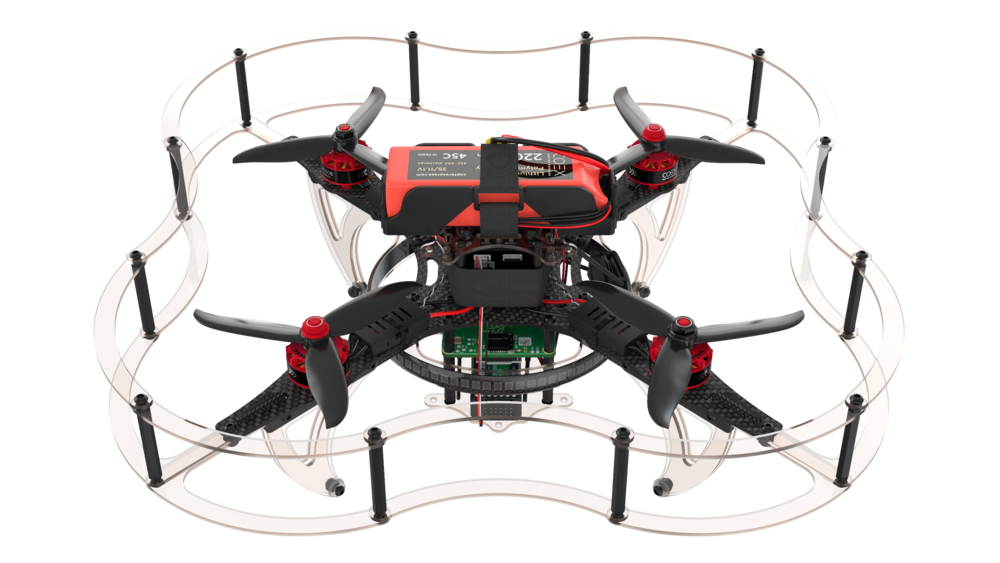
Установка АКБ
Убедитесь, чтобы все провода были спрятаны и движению пропеллеров ничего не мешает.
Проверьте сборку квадрокоптера:
- Балансировочный разъем АКБ должен быть спрятан под утягивающим ремешком.
- Регуляторы должны быть зафиксированы хомутами.
- Все провода, идущие от PDB и полетного контроллера, должны быть зафиксированы липучкой или обмотанной вокруг алюминиевых стоек.
- Пропеллеры установлены правильной стороной и соответствуют направлению кручения моторов.
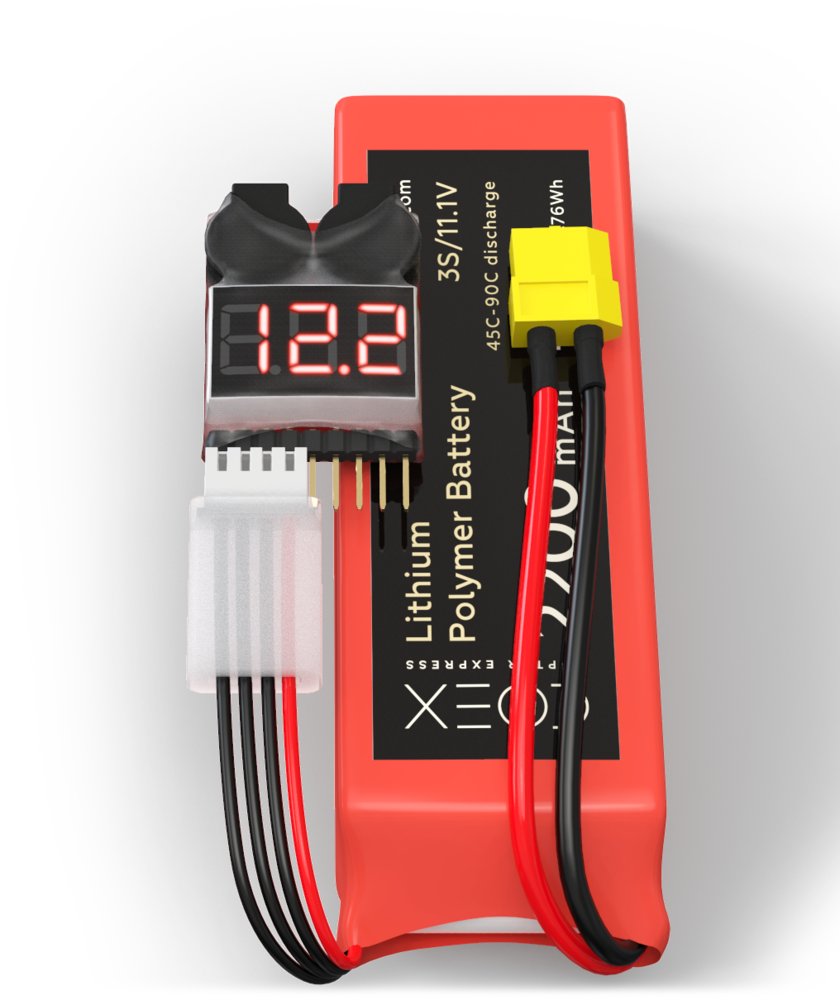
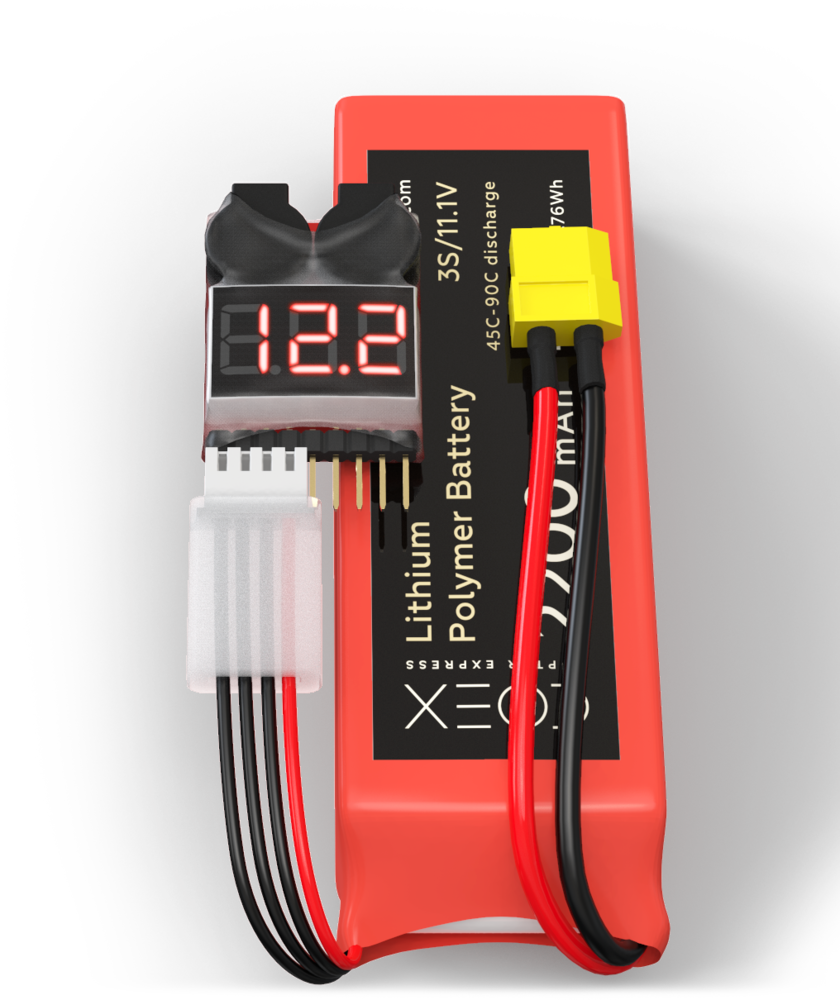
Обязательно установите и настройте индикатор напряжения перед полетом, чтобы не переразрядить аккумулятор. Для настройки индикатора используйте кнопку расположенную в его основании. Отображаемые цифры во время настройки обозначают минимально возможное напряжение в каждой ячейке аккумулятора, рекомендуемое значение 3.5.
Звуковая индикация означает, что ваш аккумулятор разряжен и его нужно зарядить.
Дрон готов к полету!
Сборка основы для рамы
СОВЕТ
Для увеличения прочности рамы вы можете распечатать на 3D принтере или нарезать на лазерном резаке рем-накладки.
-
В случае наличия, закрепите рем-накладки на пластинах жесткости, иначе продолжайте без них.
-
Совместите 2 карбоновые пластины жесткости, используя центральные пазы.
-
Используя пазы, установите сверху карбоновую центральную деку.
-
Стяните конструкцию с помощью винтов М3х8 и стальных гаек с нейлоновой вставкой, установленных в пазах пластин.
Установка моторов
-
Распакуйте моторы.
-
Используя бокорезы, укоротите провода на моторах:
- Обрежьте половину длины (оставив 30 мм).
- Зачистите (снимите 5 мм изоляции с конца провода, не повредив медные жилы).
- Скрутите медные жилы.
- Залудите провода, используя пинцет.
-
Установите мотор на луч.
-
Прикрепите мотор к лучу винтами М3х5, используя шестигранный ключ или отвёртку.

Повторите эти действия для остальных моторов.
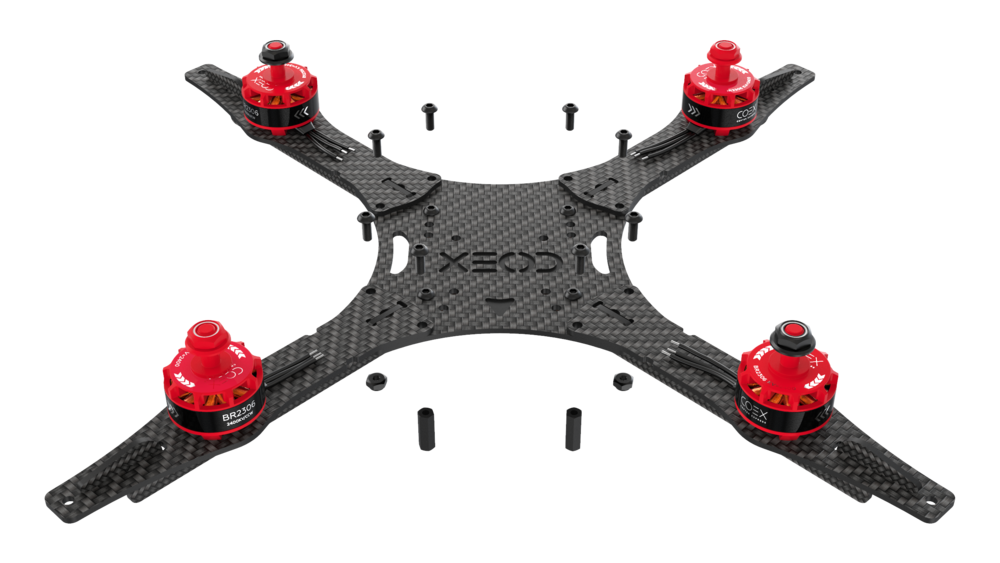
Сборка рамы
-
Установите 4 луча с моторами на базу рамы, используя пазы, согласно схеме вращения моторов.
Hint Для правильной установки моторов обратите внимание на цвета гаек. Моторы с красными гайками следует установить на передний правый и задний левый лучи, с чёрными — на передний левый и задний правый.
-
Зафиксируйте лучи на раме, используя 8 винтов М3х8 и 6 стальных гаек, а также 2 стойки «мама-мама» 15 мм.


Подготовка платы распределения питания
- Залудите контактные площадки платы питания.
- С помощью мультиметра проверьте отсутствие короткого замыкания (прозвонить):
- Установите мультиметр в режим прозвонки.
- Проверьте работу мультиметра путем замыкания щупов между собой. При корректной работе прибор издаст характерный звук.
- Попарно один щуп прикладывается к контакту «+», а второй к «-»/GND. Если в цепи есть короткое замыкание, издается звук.
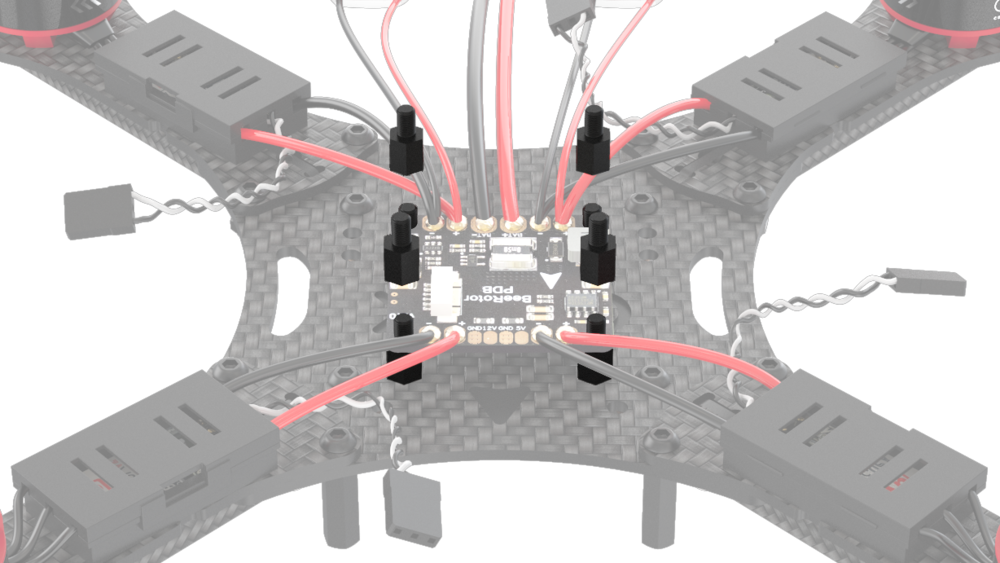
Монтаж PDB
-
Установите 4 стойки «папа-мама» 6 мм на центральную деку винтами М3х6.
-
Установите PDB на стойки.
-
Стрелки на PDB и центральной деке должны быть направлены в одну сторону.

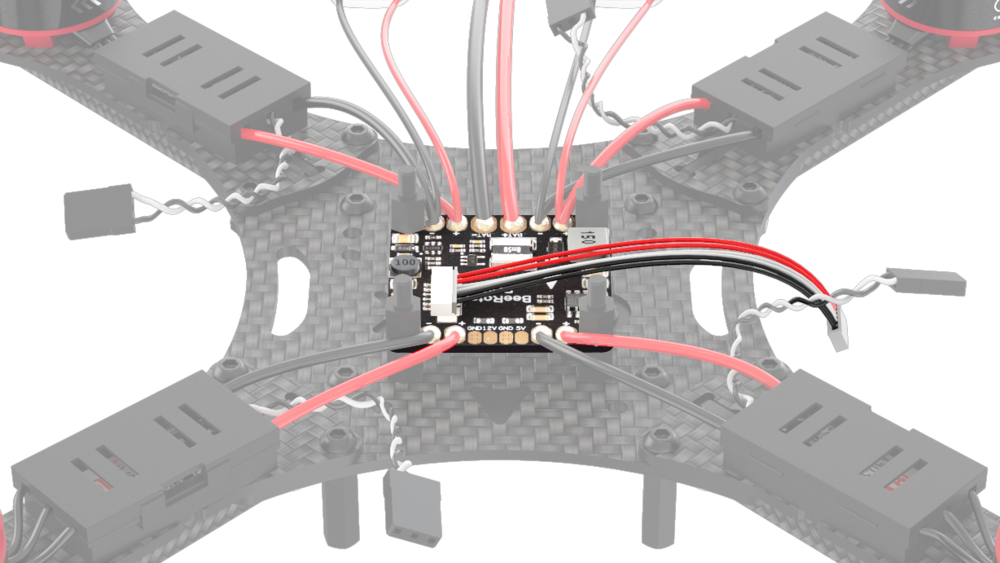
Пайка регуляторов и ВЕС
-
Припаяйте фазные провода моторов к регуляторам.
-
Припаяйте силовые провода регуляторов к контактным площадкам платы (красный к «+», черный к «-»).
-
Припаяйте силовые провода каждого BEC к контактным площадкам одного из регуляторов (красный к «+», черный к «-»).
-
С помощью мультиметра проверьте, что в цепи нет короткого замыкания.
Перевод пульта в режим PWM
Включите пульт с помощью слайдера POWER. Если пульт заблокирован, необходимо перевести все стики в начальное положение:
-
Левый стик в центральной нижней позиции.
-
Правый стик в центре.
-
Переключатели A, B, C, D в положение «от себя».

Убедитесь, что PPM в меню RX Setup отключен:
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PWM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
Сопряжение приёмника и пульта
-
Выключите пульт с помощью слайдера POWER.
-
Подключите радиоприемник к разъему BEC 5В. Чёрный провод подключите к одному из нижних пинов, красный — к одному из центральных.
-
Установите джампер на вход (B/VCC).
-
Подключите АКБ.
-
Светодиод на радиоприемнике должен мигать.
-
Зажмите кнопку BIND KEY на пульте.
-
Включите пульт (перещелкните POWER, не отпуская BIND KEY).
-
Ждите синхронизации.
-
Отсоедините джампер.
-
Светодиод на приемнике должен гореть непрерывно.



Проверка направления вращения моторов
Моторы с красными гайками должны вращаться против часовой стрелки, с чёрными — по часовой стрелке. Правильные направления вращения также указаны на самих моторах. Для проверки направления вращения можно использовать сервотестер или радиоприёмник с пультом.
- Отключите АКБ и пульт.
- Подключите сигнальный провод от ESC к выходу CH3 на приёмнике. Белый провод должен подходить к верхнему пину, чёрный — к нижнему.
- Включите пульт. Левый стик должен быть в нижнем положении.
- Подключите АКБ.
- Медленно поднимайте левый стик до тех пор, пока мотор не начнёт вращаться.
Если мотор вращается в неправильную сторону, поменяйте местами два любых фазных провода.
Повторите процесс для каждого мотора.
Перевод пульта в режим PPM
Полётный контроллер не может работать с пультом в режиме PWM, поэтому следует произвести перевод пульта в режим PPM.
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PPM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
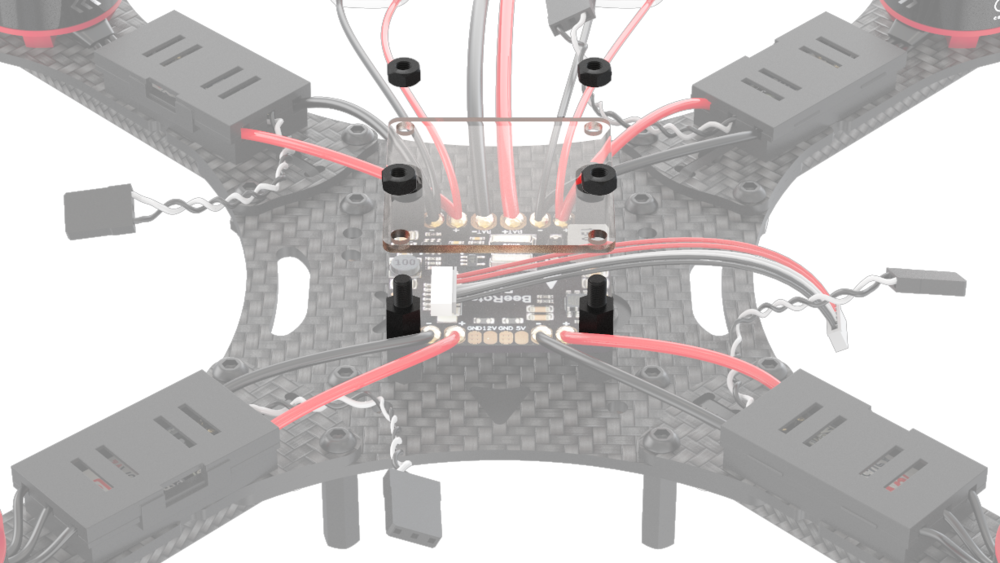
Установка пластины для полётного контроллера
-
Установите 4 стойки «папа-мама» 6 мм на PDB.
-
Подключите шлейф питания к PDB.
-
Установите поликарбонатную пластину на стойки и зафиксируйте нейлоновыми гайками.
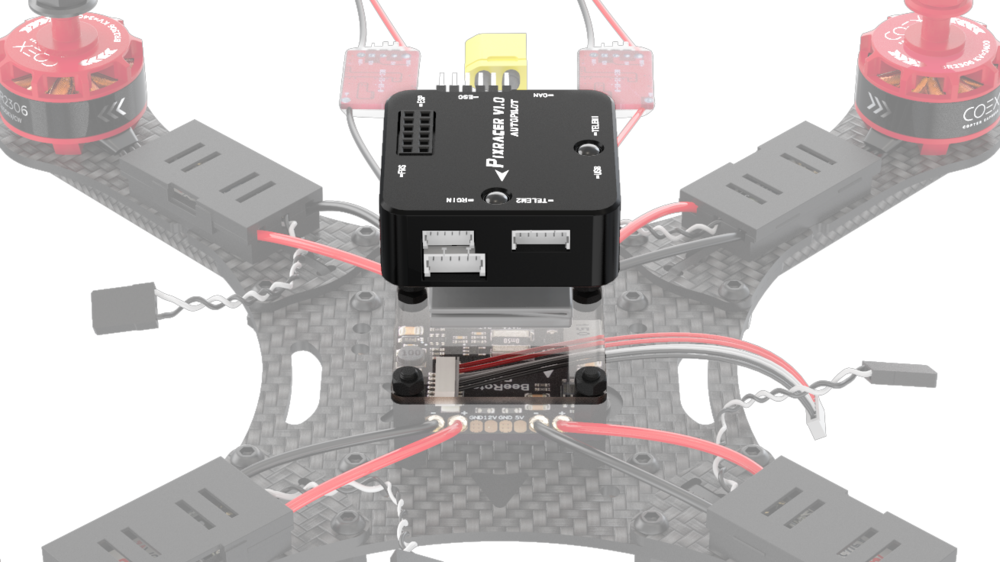
Установка полётного контроллера
-
Вставьте карту microSD в полётный контроллер.
-
Установите полетный контроллер на пластину с помощью двухстороннего скотча.
-
Стрелки на полетном контроллере и центральной деке должны быть направлены в одну сторону.
-
Подключите шлейф питания PDB к разъему «POWER» полетного контроллера, закрутив его в «косичку» для взаимной фиксации проводов.
-
Установите 4 алюминиевые стойки 40 мм с помощью винтов М3х10.
-
Подключите сигнальные провода регуляторов к полетному контроллеру следующим образом:
-
Установите 2 стойки «мама-мама» 15 мм на центральную деку с помощью винтов М3х8.
-
Другие 2 стойки были установлены ранее в разделе «Сборка рамы», п. 2.




Установка обруча для светодиодной ленты
-
Согните поликарбонатную заготовку в обруч и зафиксируйте ее концы в замке.
-
Установите обруч на раму, используя пазы.

Установка Raspberry Pi
-
Вставьте карту microSD с записанным образом в Raspberry Pi
-
Установите плату Raspberry Pi на стойки, используя 4 стойки «папа-мама».
-
Протяните провода от BEC через паз в центральной раме.
-
Подключите провод питания от BEC к Raspberry, согласно схеме:
Установка светодиодной ленты на обруч
-
Проверьте наличие напаянных пинов на контактах ленты (при отсутствии — напаять).
-
Установите светодиодную ленту на обруч (используя клеевой слой на ленте) так, чтобы контакты были в задней части коптера. Для дополнительной фиксации используйте стяжки.

Подключение светодиодной ленты к Raspberry Pi
-
Питание для ленты берется от второго BEC. Подключите контакты «-» и «+» к Ground и 5v на ленте соответственно.
-
Подключите контакт D к GPIO-пину на Raspberry. Рекомендуется использовать пин GPIO21.
Установка шлейфа для камеры
- Поднимите защелку.
- Подключите шлейф.
- Закройте защелку.
Установка оборудования на нижнюю монтажную деку
-
Подготовьте лазерный дальномер к монтажу, предварительно напаяв на него контакты.
-
Установите камеру на 4 самореза 2х5.
Warning Убедитесь, что саморезы не касаются деталей на печатной плате камеры. В противном случае камера может не заработать.
-
Установить на деку лазерный дальномер с помощью 2 винтов М3х8 и стальных гаек.
-
Установите приемник на нижнюю деку с помощью двухстороннего скотча.
-
Установите нижнюю деку с помощью 4 винтов М3х10.
-
Подключите шлейф к камере.
-
Подключите лазерный дальномер к Raspberry Pi с помощью проводов типа «мама-мама»:
- Разъем VCC к пину 1 (3.3v).
- Разъем GND к пину 9 (Ground).
- Разъем SDA к пину 3 (GPIO02).
- Разъем SCL к пину 5 (GPIO03).
Монтаж ножек
-
Установите 8 ножек с помощью винтов М3х10 и стальных гаек.
-
Установите демпфирующие прокладки на ножки с помощью винтов М3х10 и стальных гаек.
Подключение кабелей
-
Подключите кабель радиоприемника в RCIN разъем полетного контроллера.
-
Подключите кабель к приемнику, соответственно изображению.


Сборка защиты винтов
-
Соберите нижнюю часть защиты, используя 12 винтов М3х10 и 12 нейлоновых стоек 40 мм.
-
Установите верхнюю часть, используя 12 винтов М3х10.
-
Установите защиту на коптер, с помощью 4 винтов М3х10 и стальных гаек.
Установка верхней деки на коптер
-
Установите на верхнюю деку держатель АКБ с помощью 4 винтов М3х8 и стальных гаек.
-
Проденьте в пазы ремешок для фиксации АКБ.
-
Установите верхнюю деку на коптер с помощью 4 винтов М3х10.
-
Подключите USB кабель к разъему на полетном контроллере и USB разъему Raspberry Pi.
-
Зафиксируйте «улитку» кабеля в удобном месте с помощью двухстороннего скотча так, чтобы провод не мешал вращению винтов.

Установка пропеллеров и подготовка к полёту
Произведите настройку компонентов квадрокоптера, используя раздел «Настройка».
ВНИМАНИЕ
Установка пропеллеров должна производиться только после окончательной настройки коптера, непосредственно перед полетом.
Установите 4 пропеллера, согласно схеме вращения. При установке пропеллеров АКБ должна быть отключена.
При установке будьте внимательны, чтобы пропеллер не был перевернут. На лицевой стороне пропеллера имеется маркировка его характеристик, а также направление вращения, которое должно совпадать с направлением вращения моторов.
Установка АКБ
ВНИМАНИЕ
Убедитесь, чтобы все провода были спрятаны и движению пропеллеров ничего не мешает.
Проверьте сборку квадрокоптера:
- Балансировочный разъем АКБ должен быть спрятан под утягивающим ремешком.
- Регуляторы должны быть зафиксированы хомутами.
- Все провода, идущие от PDB и полетного контроллера, должны быть зафиксированы липучкой или обмотанной вокруг алюминиевых стоек.
- Пропеллеры установлены правильной стороной и соответствуют направлению кручения моторов.
Обязательно установите и настройте индикатор напряжения перед полетом, чтобы не переразрядить аккумулятор. Для настройки индикатора используйте кнопку расположенную в его основании. Отображаемые цифры во время настройки обозначают минимально возможное напряжение в каждой ячейке аккумулятора, рекомендуемое значение 3.5.
СОВЕТ
Звуковая индикация означает, что ваш аккумулятор разряжен и его нужно зарядить.
СОВЕТ
Дрон готов к полету!
Сборка Клевера 4.2 Pro
Размер крепежа
Hint Во время сборки используются винты и стойки различных размеров, использование крепежа не соответствующего размера может повредить коптер.
 |
Винт M3x10 |  |
Стойка алюминиевая 40 мм |
 |
Винт M3x8 |  |
Стойка алюминиевая 15 мм |
| Винт M3x5 |  |
Стойка нейлоновая 40 мм | |
| Саморез M2x5 |  |
Стойка нейлоновая 30 мм | |
| Гайка M3 (самоконтрящаяся) |  |
Стойка нейлоновая 20 мм | |
| Гайка M3 (нейлоновая) |  |
Стойка нейлоновая 15 мм | |
 |
Стойка демпферная |  |
Стойка нейлоновая 6 мм |
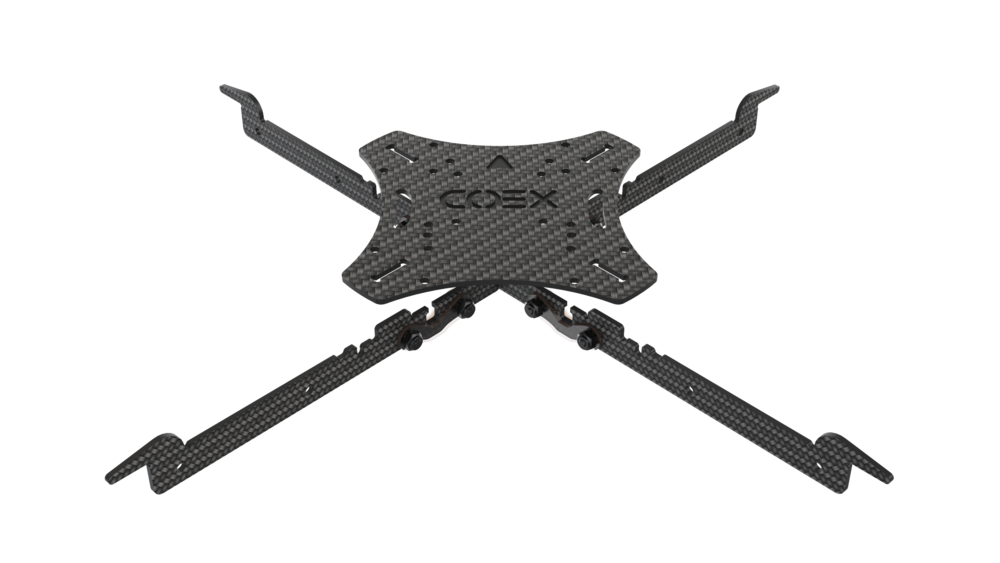
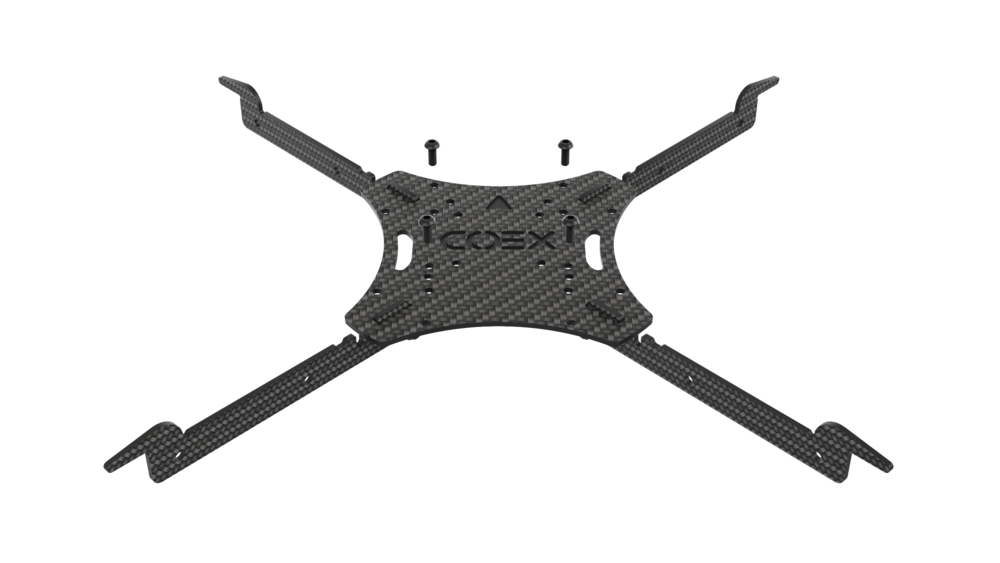
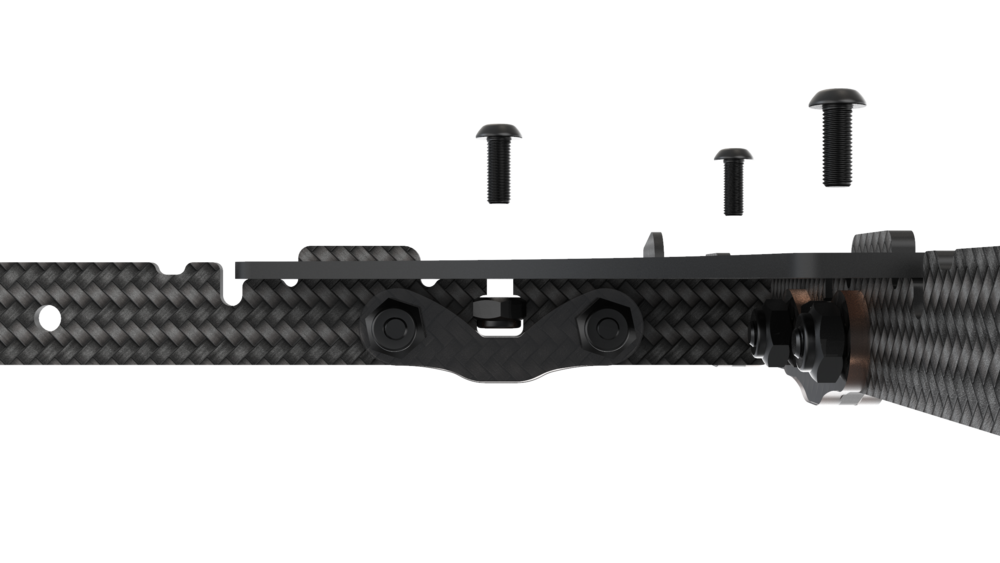
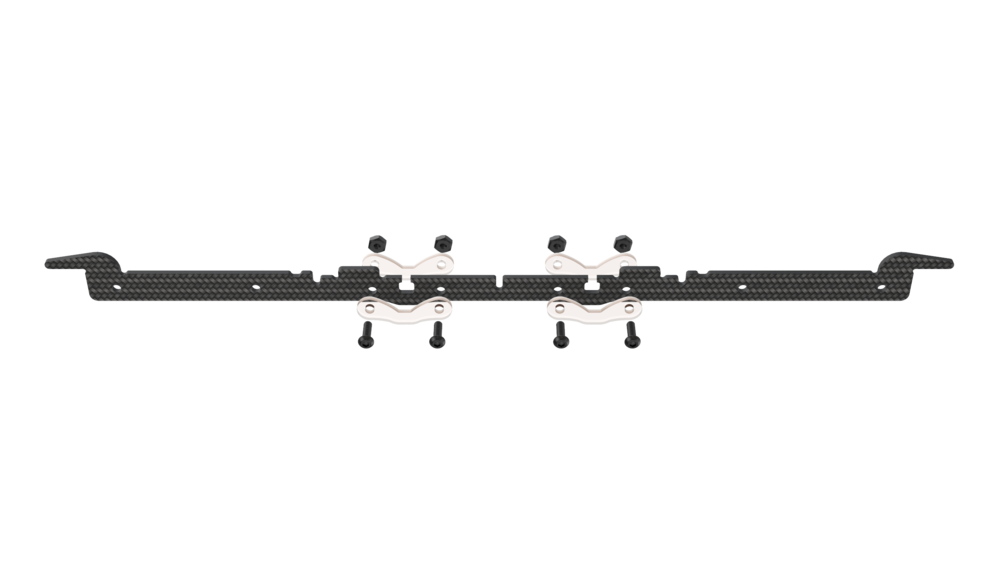
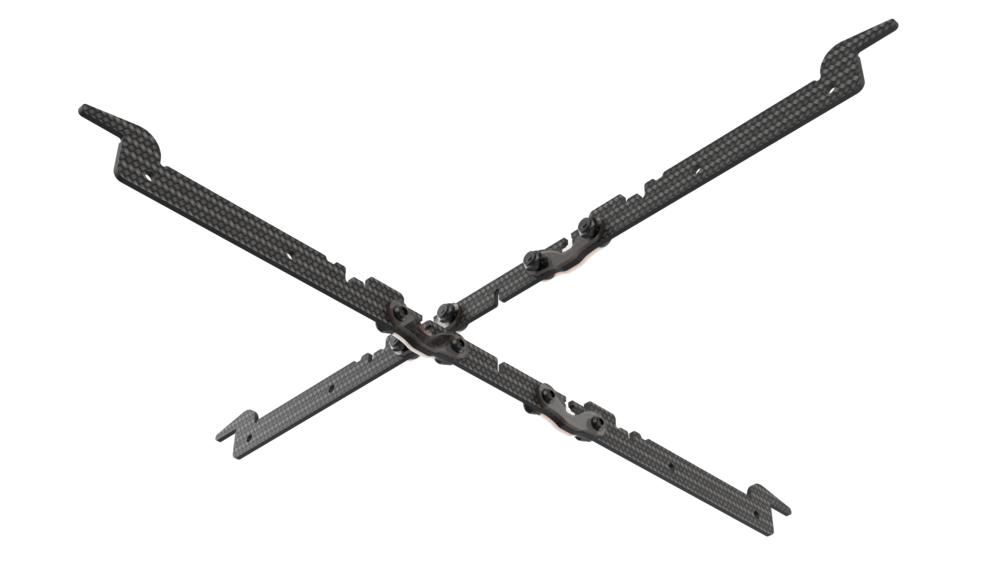
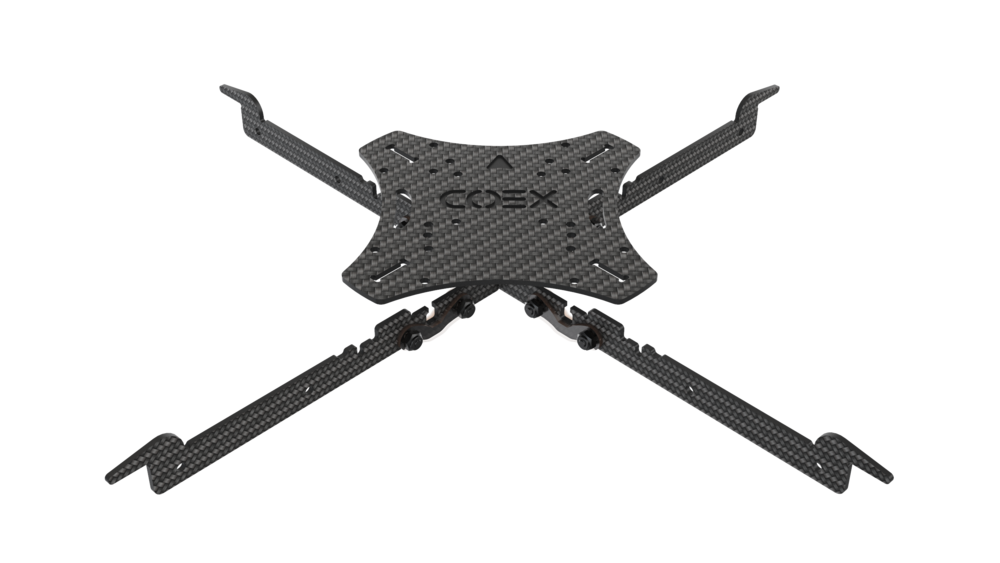
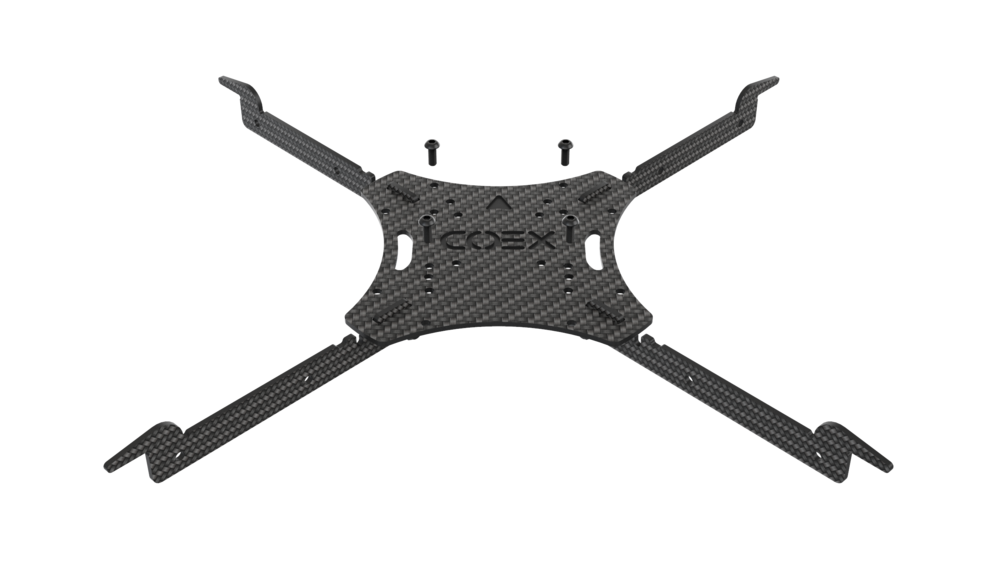
Сборка рамы
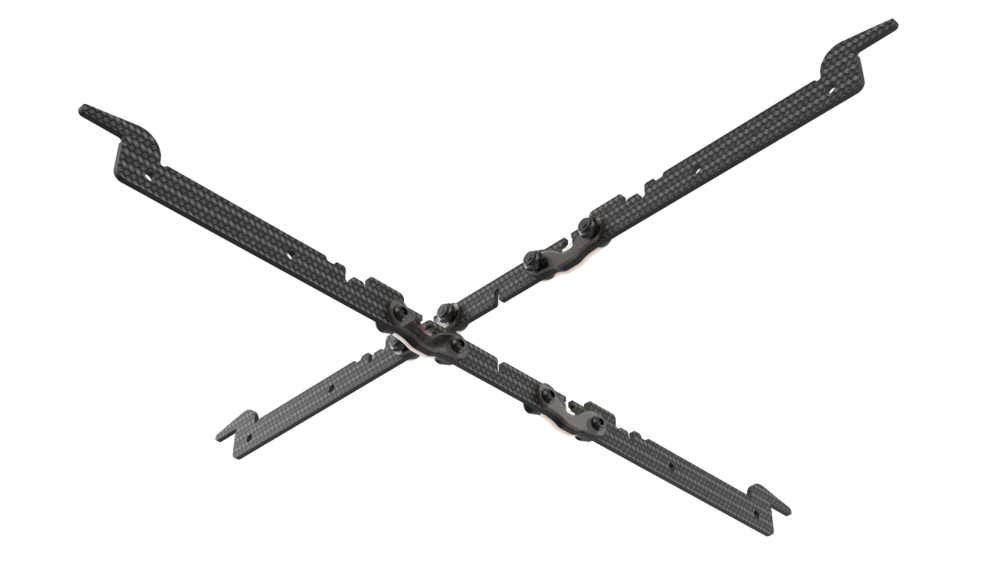
-
Совместите 4 луча с центральной декой, зафиксируйте их при помощи винтов М3х8 и гаек с нейлоновой вставкой.
-
На центральные отверстия в главной деке установите 2 стойки 15 мм и закрепите их с помощью винтов М3х8.
-
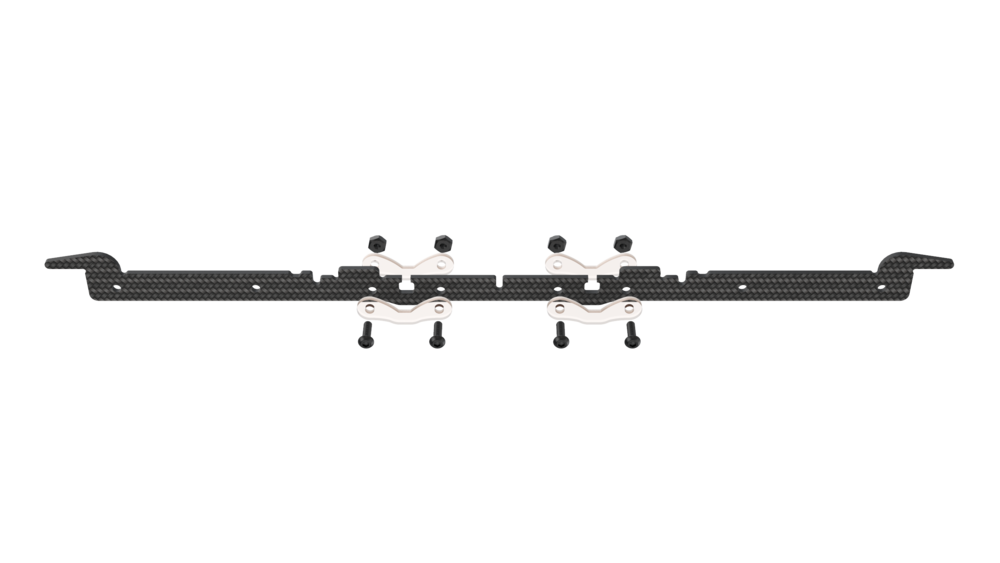
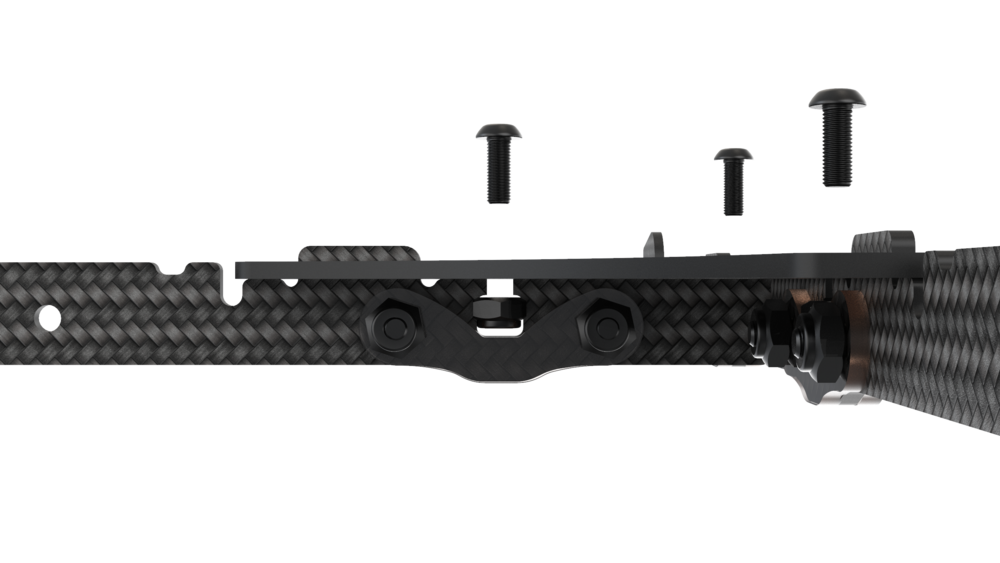
Установите крючок пластины жесткости в паз на луче.
-
Прижмите пластины жесткости к главной деке.
-
Стяните пластины жесткости с помощью малой карбоновой деки.
-
Установите 4 нейлоновые стойки 6 мм и закрепите их с помощью винтов М3х5.







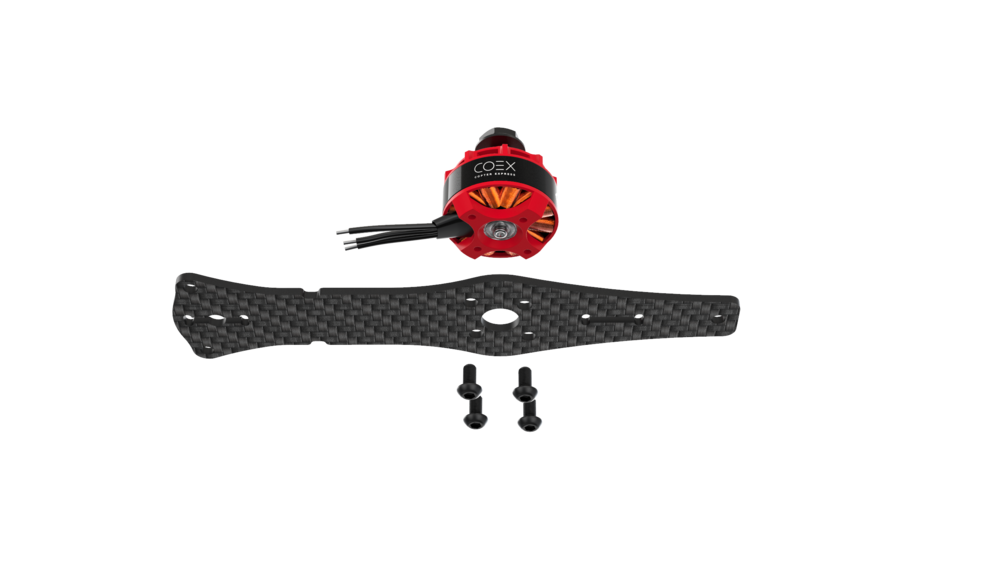
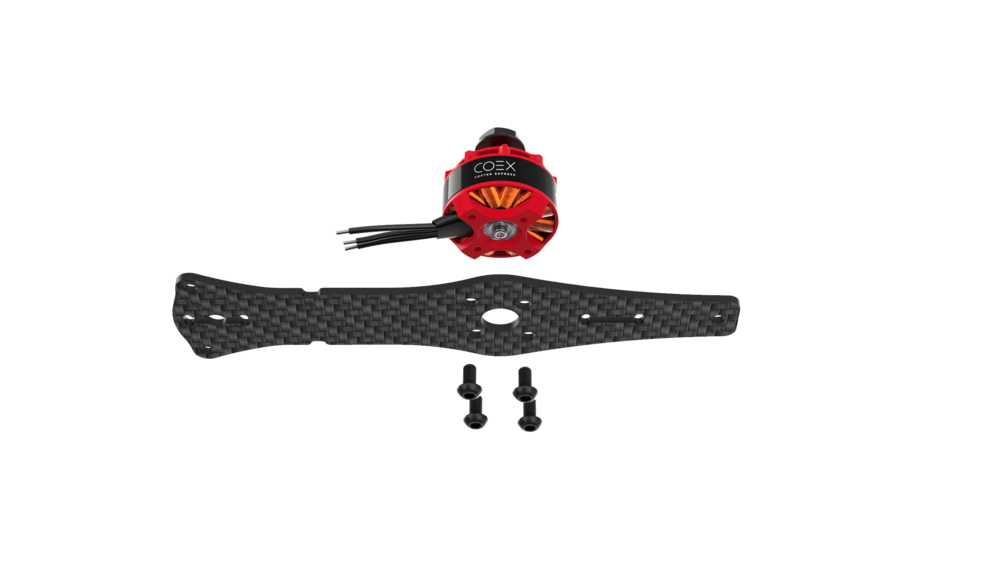
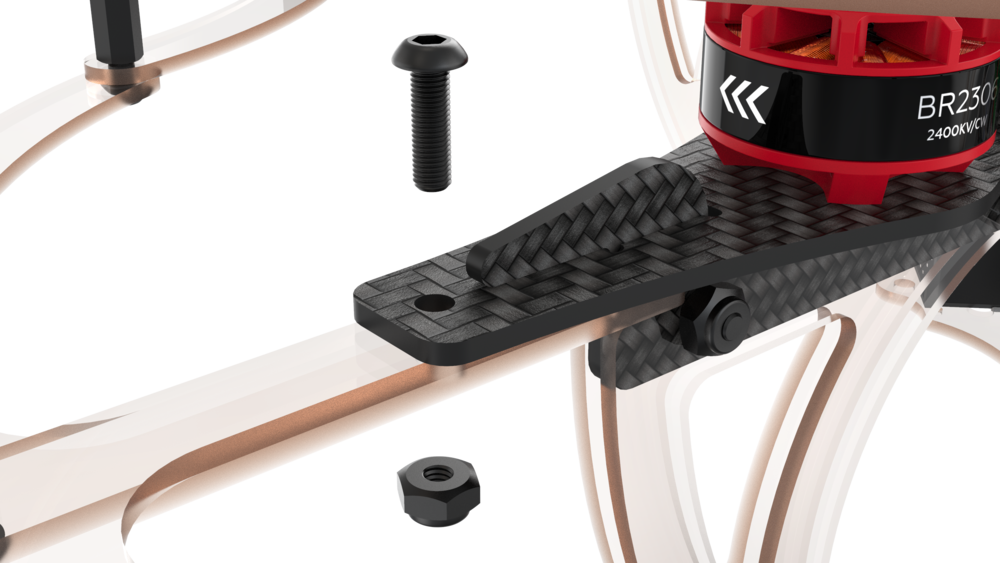
Установка моторов
-
При установке моторов обратите внимание на схему вращения моторов. Маркировка вращения на моторах должна совпадать со схемой вращения.
-
Установите мотор на соответствующие отверстия в луче с помощью винтов М3х5.



Caution Убедитесь, что моторы закреплены с помощью винтов М3х5, в противном случае может возникнуть короткое замыкание между обмотками.
Установка ESC и PDB
-
Подсоедините к моторам регуляторы оборотов (ESC) с помощью разъемов MR30 и закрепите их на лучах с помощью хомутов.
-
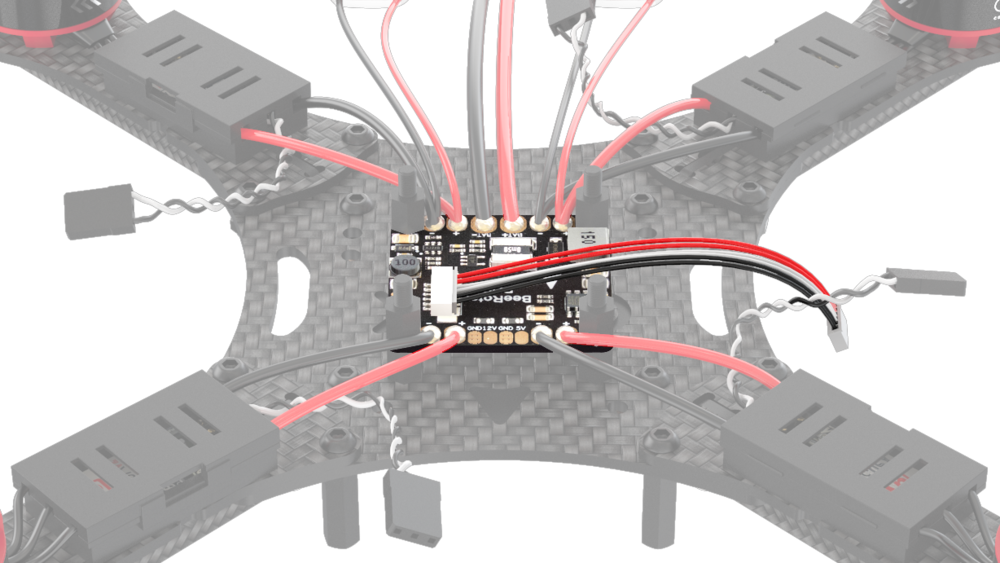
На заранее закрепленные стойки установите плату распределения питания (PDB) и зафиксируйте ее стойками 6мм. Плата распределения питания должна быть установлена таким образом, чтобы кабель подключения питания был направлен в сторону хвоста коптера.
-
Подключите к плате распределения питания силовые выходы регуляторов оборотов.




Hint Если вы планируете использовать камеру Hawk Eye, припаяйте провода питания на данном этапе,
так как после установки полетного контроллера сделать это будет затруднительно
Установка полетного контроллера
Набор «Клевер 4» позволяет установить различные полетные контроллеры, к примеру COEX Pix и Pixracer.
Caution При установке полетного контроллера обратите внимание на ориентацию платы. Если Вы установите COEX Pix серворазъемами назад (как на изображениях в инструкции) то впоследствии при настройке полетного контроллера в Autopilot Orientation необходимо будет указать значение
ROTATION_ROLL_180_YAW_90, иначе полетный контроллер будет некорректно воспринимать наклоны и повороты коптера. Для полетного контроллера Pixracer это не требуется.
COEX Pix
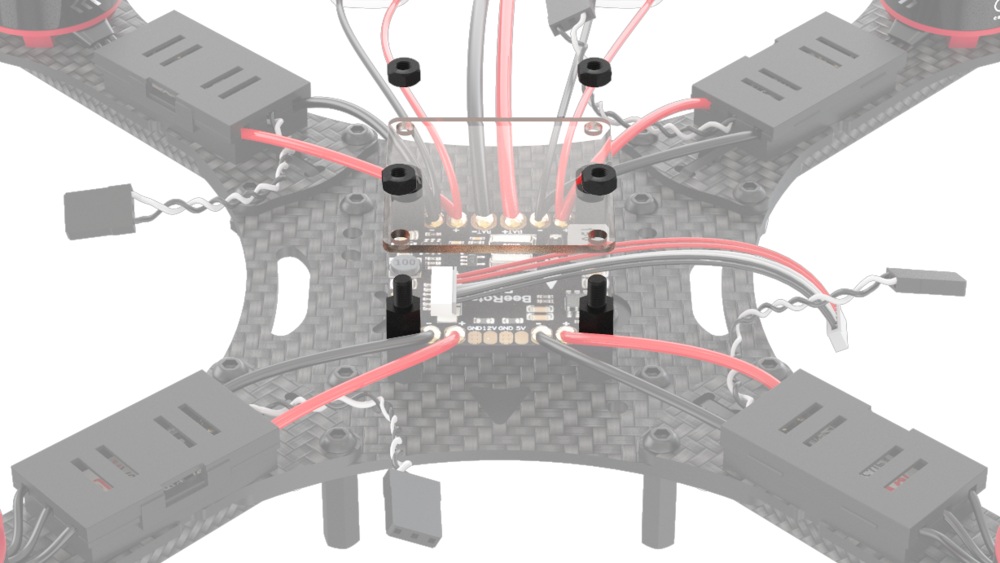
Hint Перед установкой демпферных стоек, накрутите 2 слоя нейлоновых гаек, для более прочного крепления или откусите лишнюю резьбу с помощью бокорезов.
Установите демпферные стойки 6мм, на них закрепите COEX Pix с помощью нейлоновых гаек.

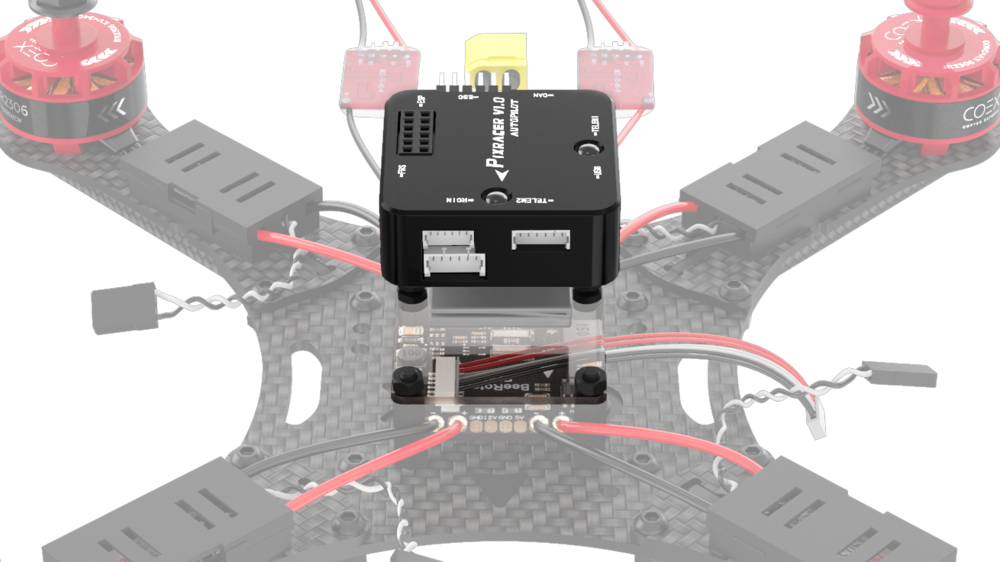
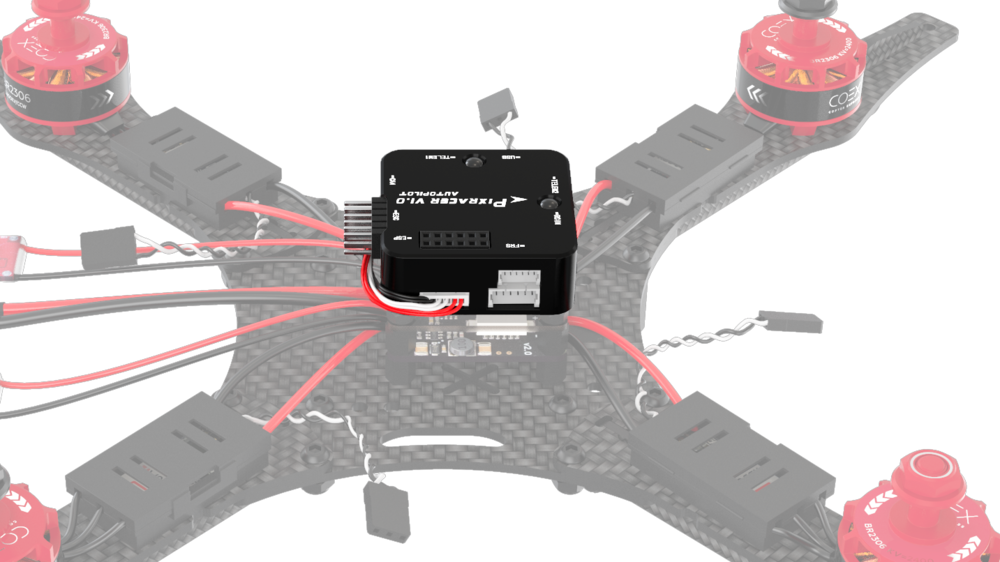
Pixracer
-
Установите малую деку на стойки и зафиксируйте ее нейлоновыми гайками.
-
Склейте 3–4 слоя двустороннего скотча, приклейте его в центр малой деки и установите сверху Pixracer.


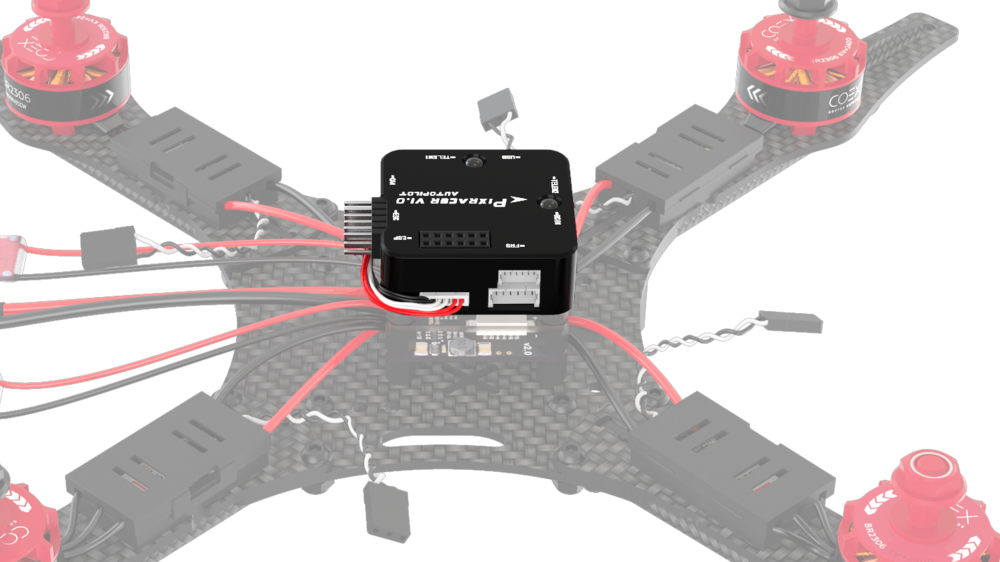
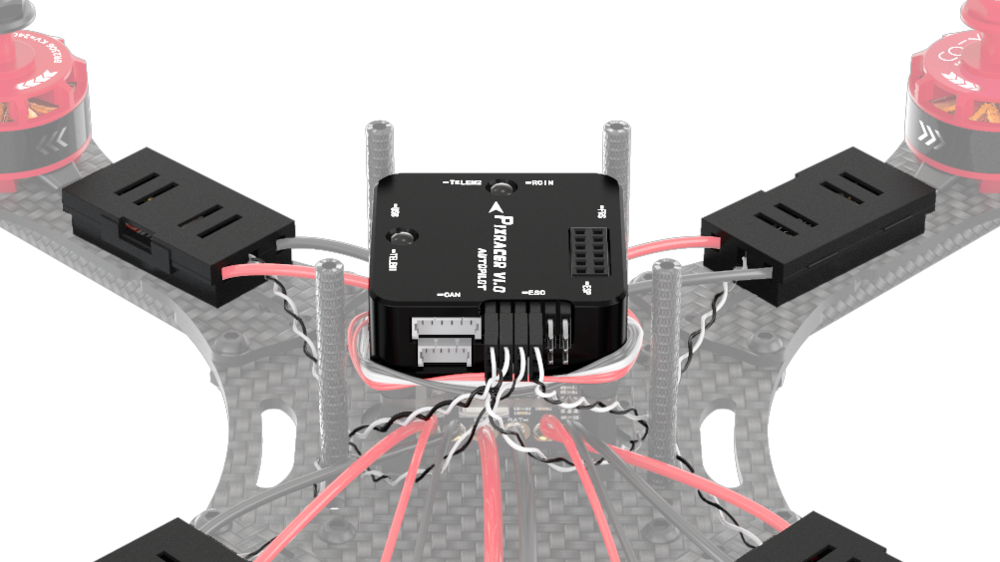
Подключение полетного контроллера
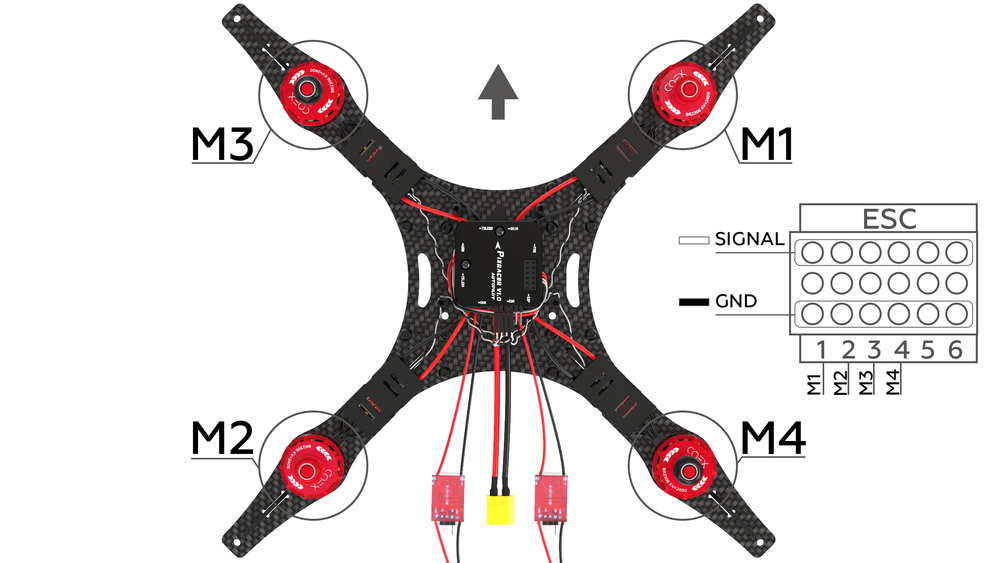
-
Подключите регуляторы оборотов к полетному контроллеру в соответствии со схемой.
-
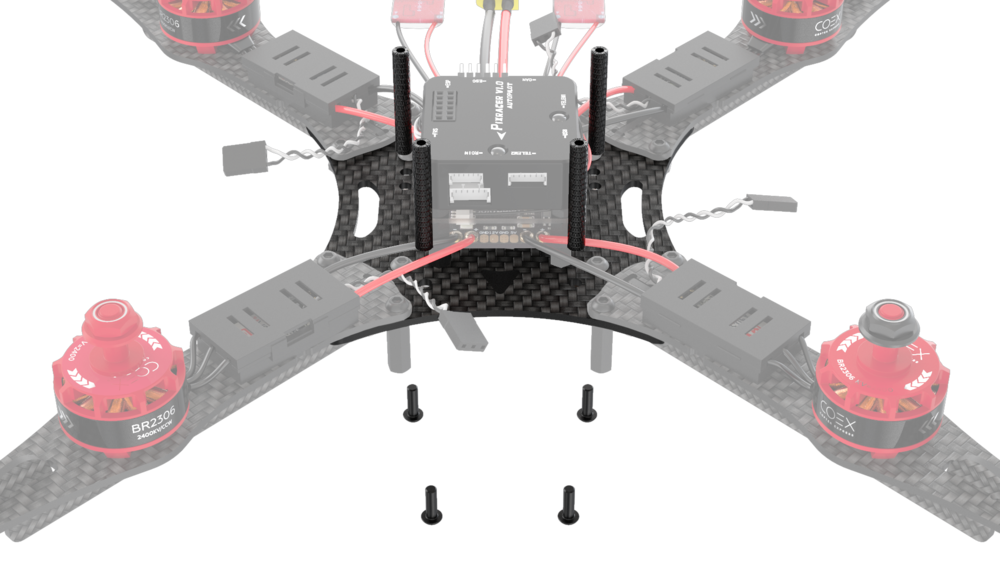
Подключите кабель питания к плате распределения питания (PDB) и соответствующему разъему на полетном контроллере.
-
Установите алюминиевые стойки 40 мм на винты М3х10.




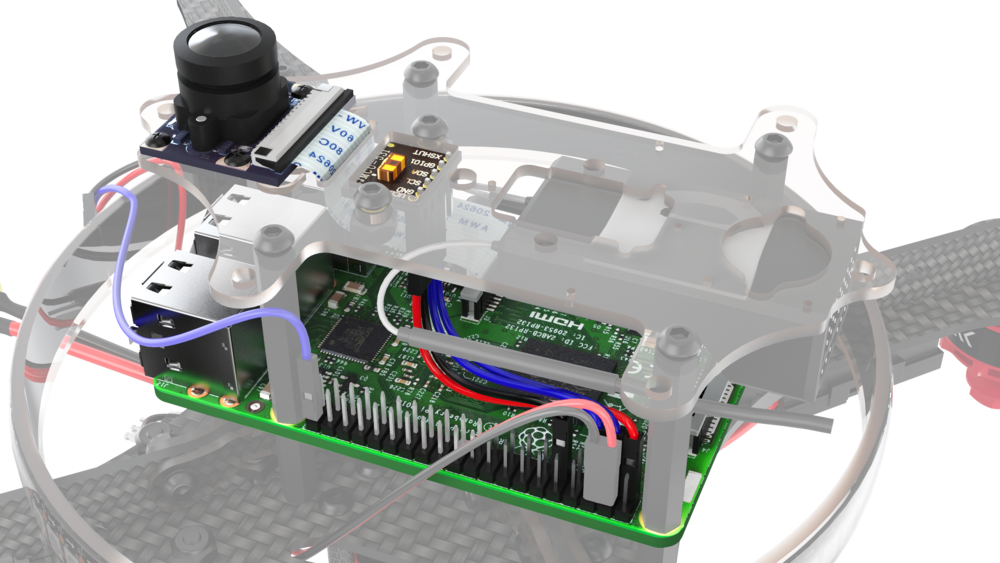
Установка Raspberry Pi
-
На основную деку установите стойки 20 мм, закрепите их с помощью винтов М3х8.
-
На монтажную деку установите стойки 6мм и стойки 30 мм, закрепите их с помощью винт М3х5 и М3х10 соответственно.
-
Установите собранную монтажную деку на основную и закрепите с помощью винтов М3х8.
-
Установите плату Raspberry Pi и зафиксируйте с помощью нейлоновых гаек.
-
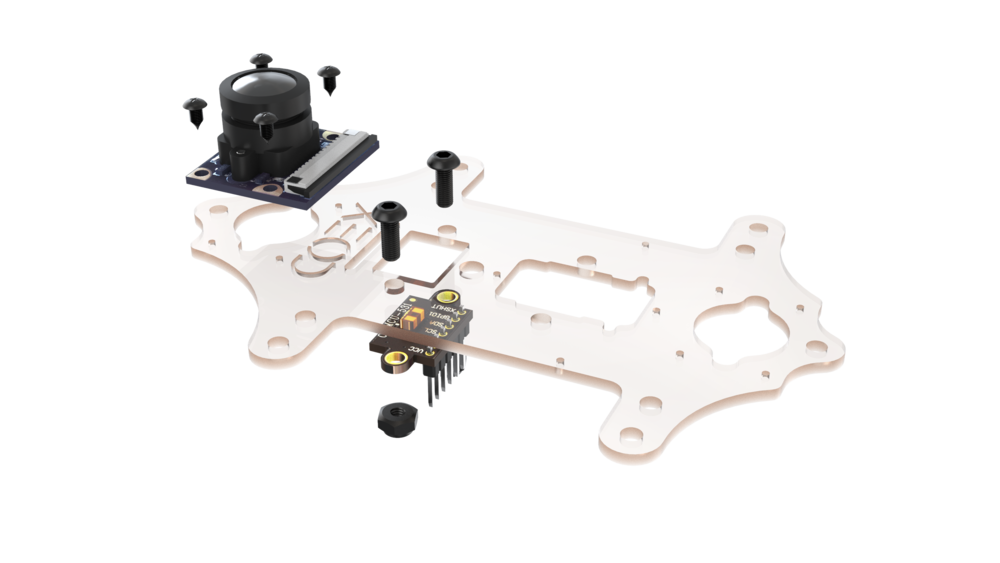
На деку захвата установите дальномер с помощью самоконтрящихся гаек и винтов М3х8, и приклейте радиоприемник с помощью двустороннего скотча.
Caution Обратите внимание, что крепящие гайки расположены обратной стороны от платы дальномера, как на схеме, иначе есть большая вероятность повредить плату.
Hint Также плата может быть закреплена на саморезы М2 в соседние отверстия.
-
Установите 4 стойки 20мм и закрепите их с помощью винтов М3х8.
-
На малую монтажную деку установите камеру и зафиксируйте ее с помощью 2ух саморезов М2х5, в верхнем левом и нижнем правом углах.
-
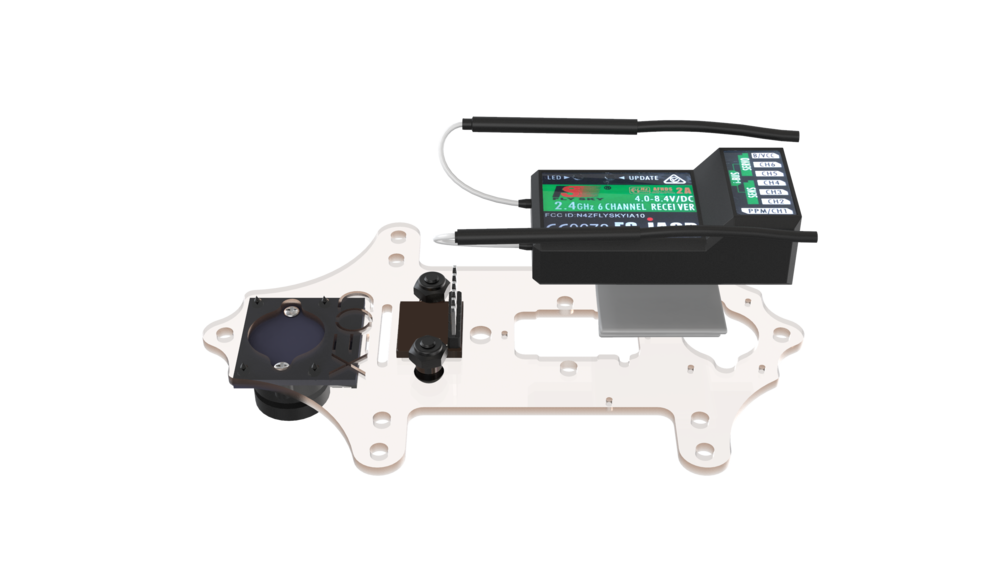
Установите модуль камеры на деку захвата и закрепите с помощью винтов М3х8.
-
Установите собранную деку захвата и зафиксируйте с помощью винтов М3х8.
-
Подключите к Raspberry Pi дальномер и кабель питания.
-
Подключите радиоприемник к полетному контроллеру используя разъем RCIN.
-
Подключите шлейф камеры к Raspberry Pi.
-
Подключите полетный контроллер к Raspberry Pi с помощью USB-кабеля.














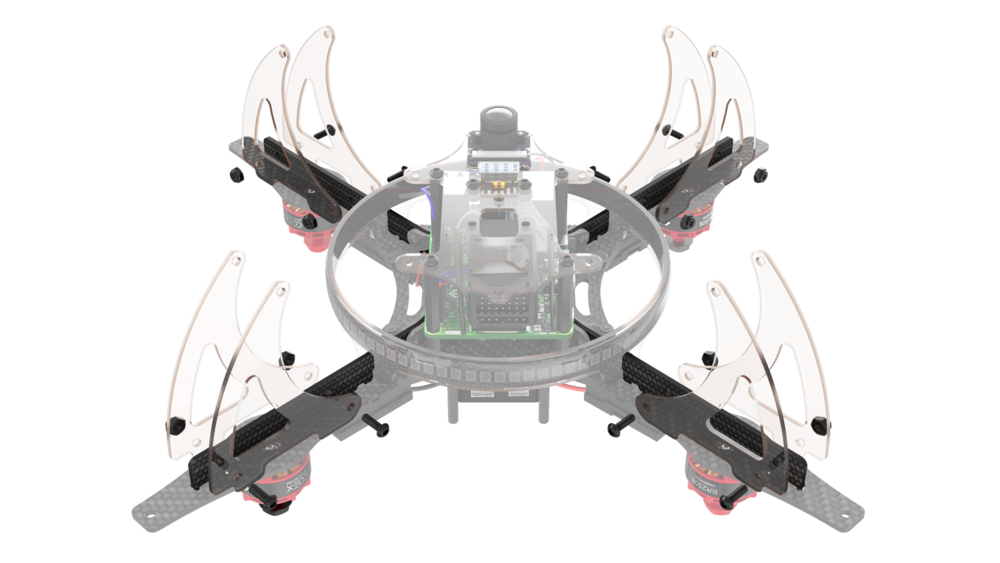
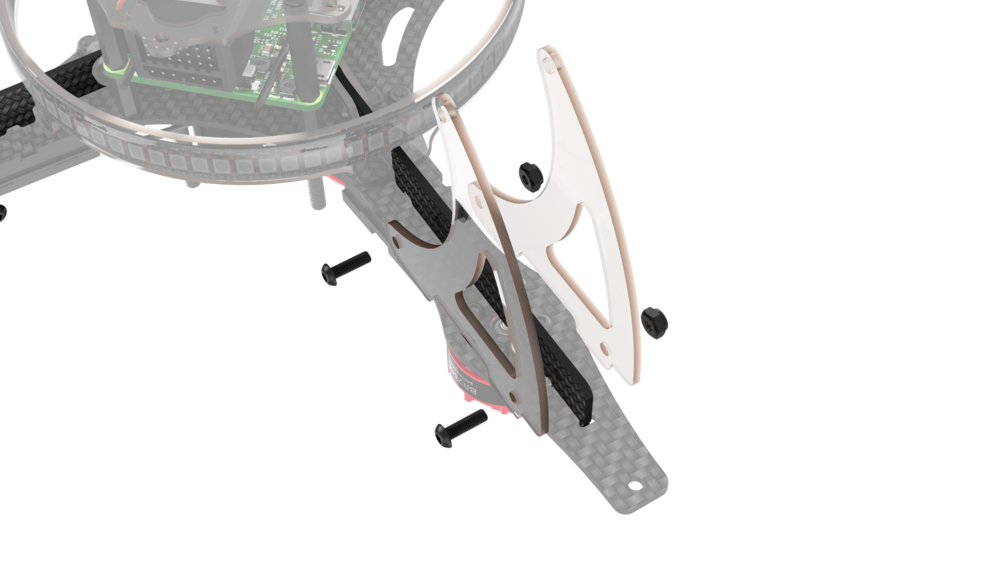
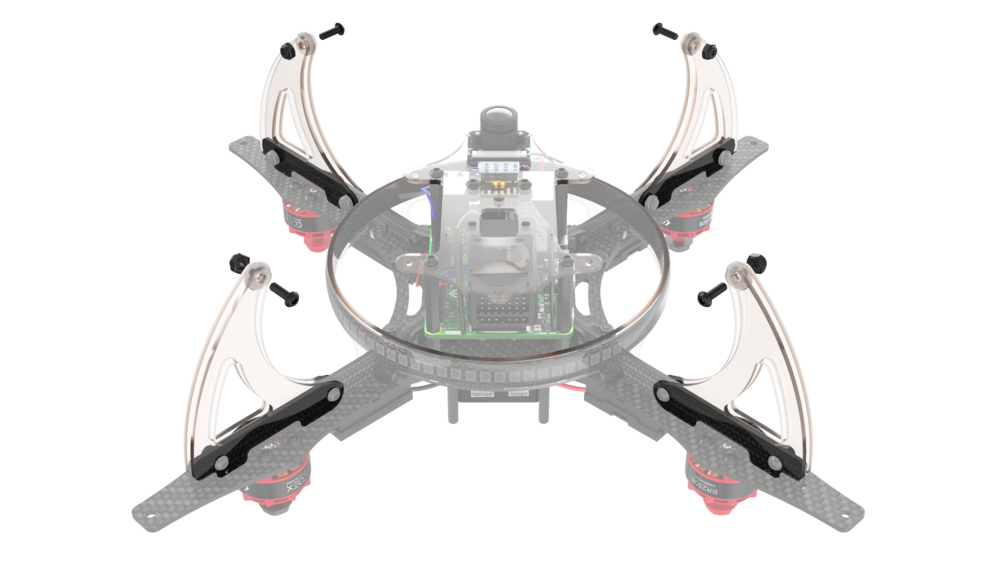
Установка LED ленты и ножек
-
Соберите обруч для светодиодной ленты, объединив замок на концах.
-
Наклейте светодиодную ленту на обруч, для большей крепкости притяните ее с помощью 3-4 хомутов.
-
Установите ножки на пластину жесткости с помощью самоконтрящихся гаек и винтов М3х10 используя только крайние монтажные отверстия. Снизу, между пластинами ножек установите демпферное силиконовое колечко.
-
Отогните ножки назад и в специальный паз на них установите обруч со светодиодной лентой, таким образом, чтобы кабели подключения выходили с хвостовой стороны коптера.
-
Закрепите ножки с помощью самоконтрящихся гаек и винтов М3х10.
-
Подключите питание светодиодной ленты (красный, черный кабели) в короткий разъем JST на плате распределения питания.
-
Подключите сигнальный выход светодиодной ленты (белый кабель) в Raspberry Ri, к пину GPIO21.







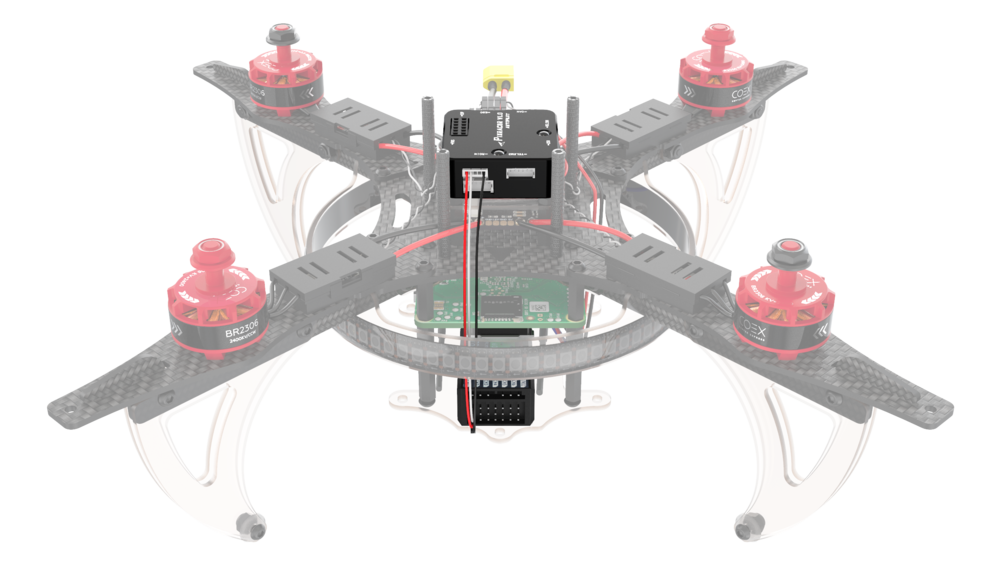
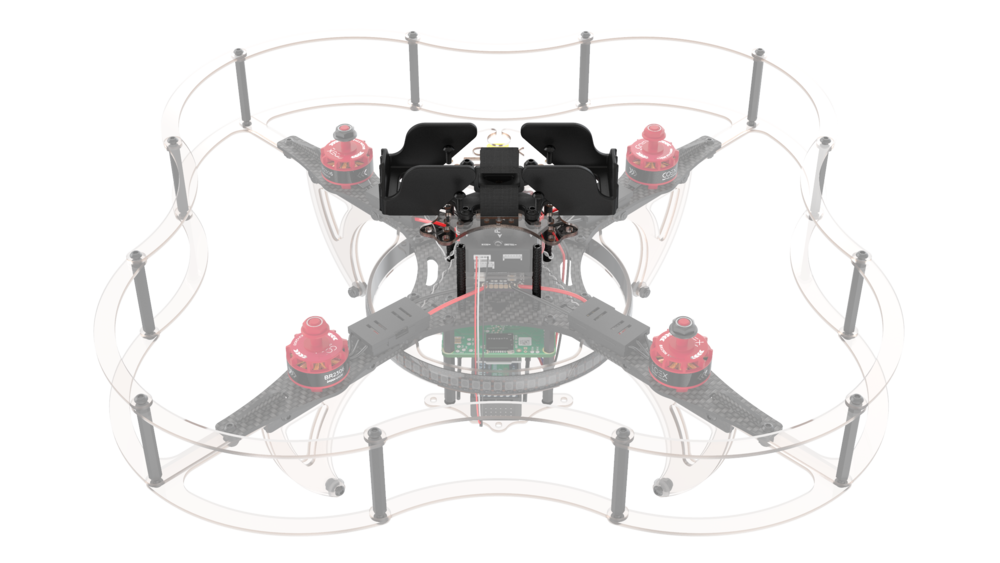
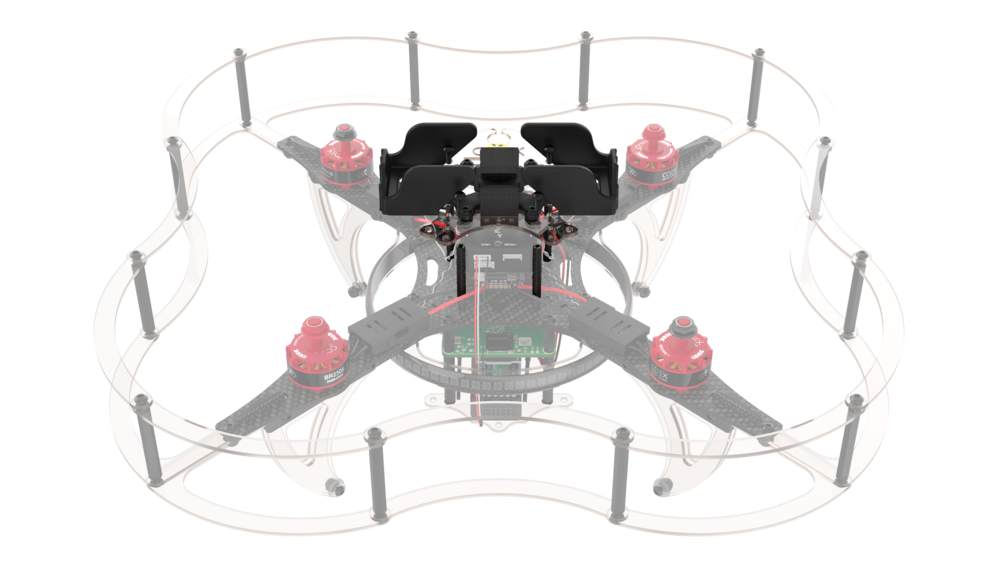
Установка камеры Hawk Eye
Установите скобу на камеру и зафиксируйте её винтами М2.

Зафиксируйте полетный контроллер нейлоновыми стойками 6мм.

Сверху на стойки установите плату камеры, зафиксируйте её нейлоновыми гайками и подключите шлейф.

Установите верхнюю деку. Установите 4 нейлоновых стойки 40мм, вставьте малую монтажную деку вертикально и зафиксируйте сверху еще одной монтажной декой, как показано на фотографии.


Зафиксируйте камеру на малой монтажной деке при помощи двустороннего скотча.

Теперь можно производить настройку камеры.
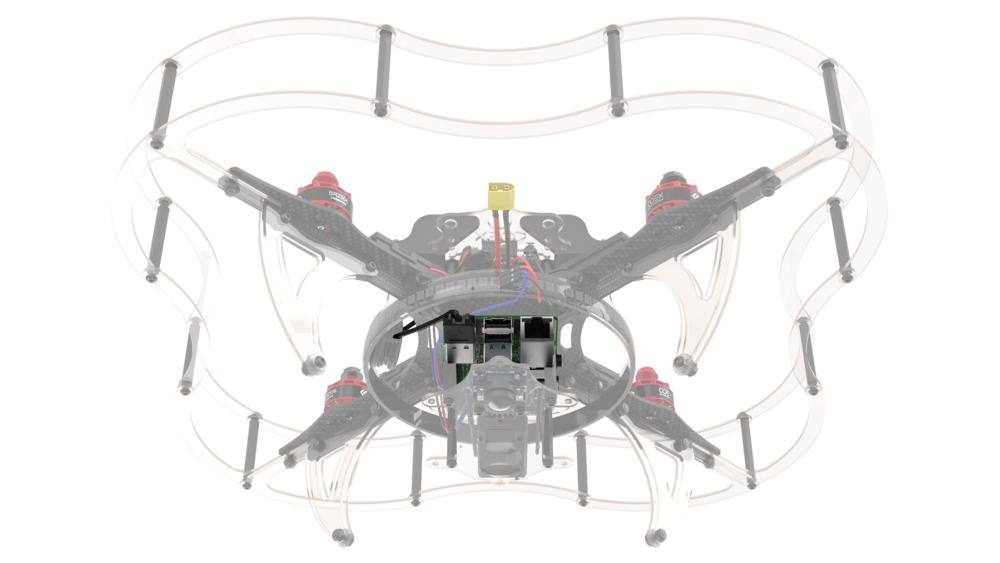
Установка GPS
Зафиксируйте GPS-приемник на верхней деке при помощи двустороннего скотча. Стрелка на приемнике должна совпадать с передом коптера.

Подключите приемник в разъем GPS полетного контроллера, и зафиксируйте кабель при помощи стяжки.

Настройка и использование GPS описаны в данной статье.
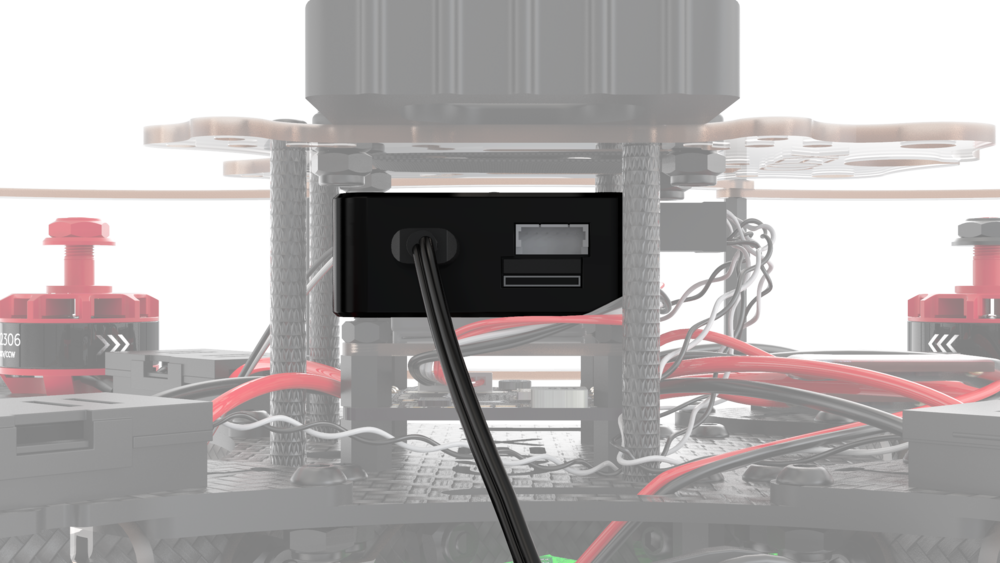
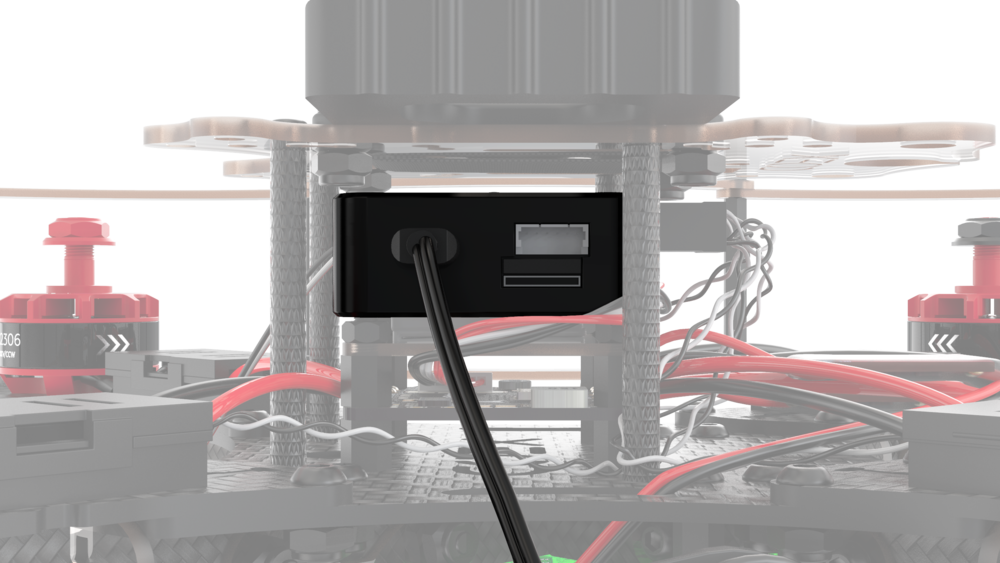
Установка радио-телеметрии
Зафиксируйте модуль телеметрии на нижней деке при помощи двустороннего скотча.

Подключите модуль при помощи кабеля в порт Telem1 полетного контроллера. Теперь можно выполнить настройку.
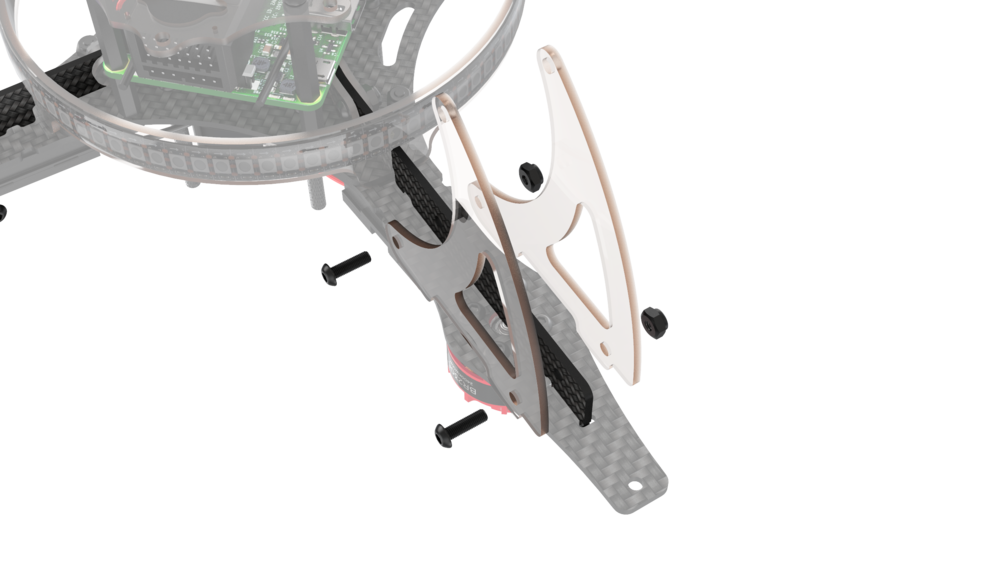
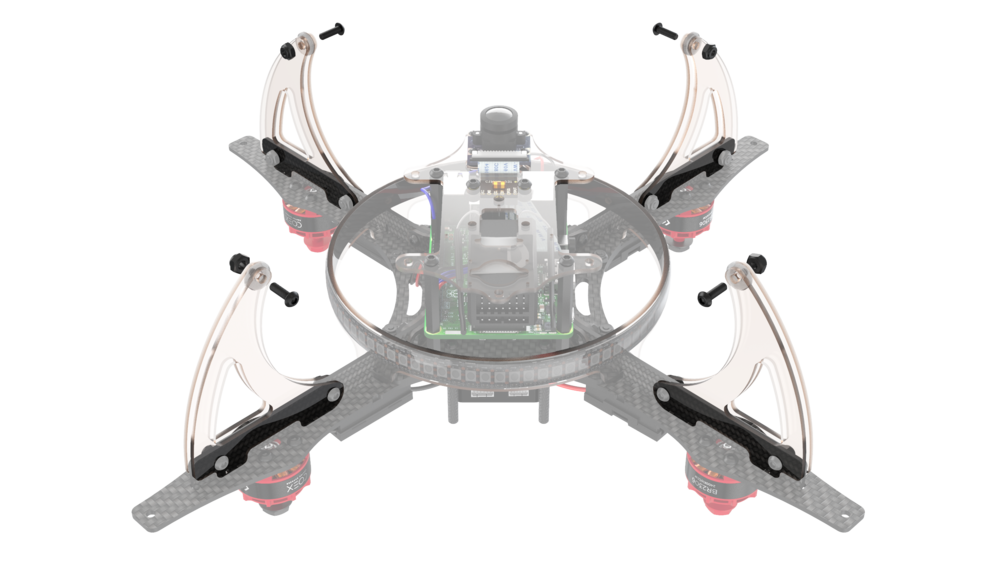
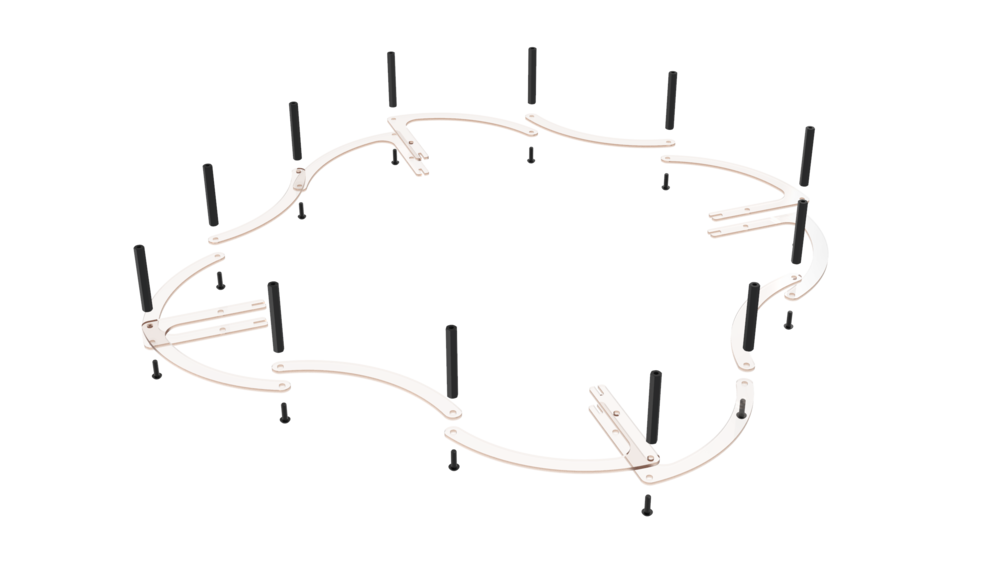
Установка защиты
-
Соберите нижний уровень защиты с помощью стоек 40 мм и винтов М3х10.
-
Соберите верхний уровень защиты с помощью винтов М3х10.
-
Установите монтажную деку и закрепите ее винтами М3х8.
-
Установите защиту и закрепите на лучах с помощью самоконтрящихся гаек и винтов М3х10.




Success Дрон собран, далее произведите настройку.
90 850 руб.
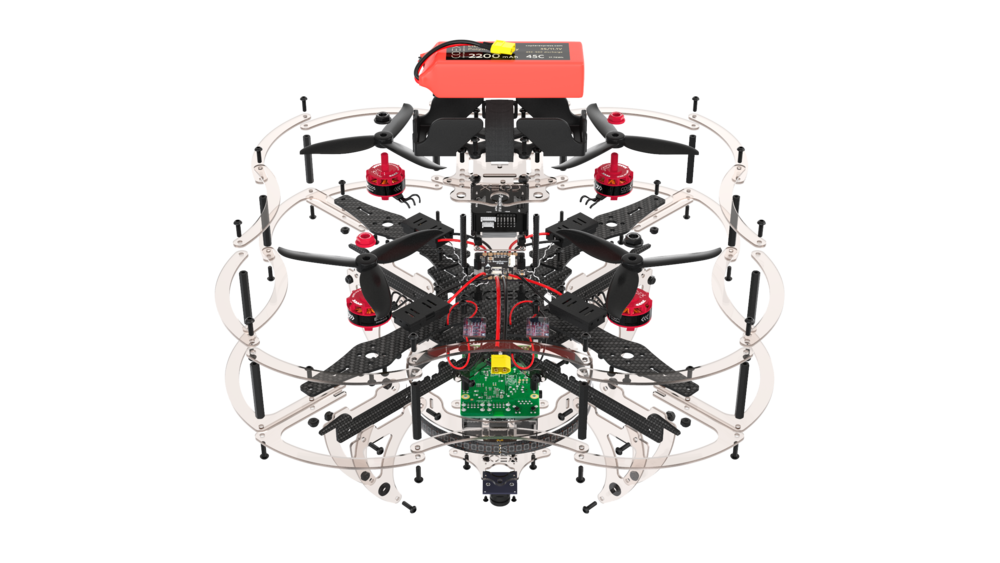
Карбоновая рама, защита опор, мощные бесколлекторные двигатели, полетник PX4, Raspberry Pi 4, программируемая светодиодная полоса, камера машинного зрения, лазерный дальномер, навигация в помещении, аккумулутяор с увеличенной емкостью.
Данный конструктор был разработан для учеников старших классов и студентов университетов, а также для всех, кто занимается исследовательскими проектами, участвует в соревнованиях, олимпиадах и хакатонах.
1.1. Полетный контроллер Pixracer: наличие
1.1.1. Технические характеристики:
1.1.2. Габаритные размеры платы 36 мм на 36 мм
1.1.3. Тактовая частота процессора 168 МГц
1.1.4. Наличие вывода питания +5В на серворазъемах 2 шт
1.1.5. Наличие ЭМИ-фильтров емкостью 2.2 мкф по питанию 7 шт
1.1.6. Возможность установки прошивки PX4 наличие
1.1.7. Поддержка интерфейсов UART, I2C, CAN наличие
1.1.8. Возможность стабилизации в разных полетных режимах по угловой скорости, ориентации, позиции. Наличие
1.2. Плата распределения питания, PDB BeeRotor наличие
1.2.1. Технические характеристики:
1.2.2. Преобразователь напряжения на 5 вольт наличие
1.2.3. Количество контактных площадок 12 шт
1.2.4. Датчик напряжения с поддержкой интерфейса UART наличие
1.3. Регулятор оборотов ESC DYS 30a: наличие
1.3.1. Технические характеристики:
1.3.2. Максимальный рабочий ток 30 ампер
1.3.3. Максимальное напряжение 25,2 Вольта
1.4. Бесколлекторный электродвигатель, COEX BR2306, 2400 kV наличие
1.4.1. Технические характеристики:
1.4.2. Диаметр статора 23 мм
1.4.3. Высота статора 6 мм
1.4.4. Мощность двигателя 450 ватт
1.5. Пропеллер пластиковый 5040×4 (пара) наличие
1.5.1. Технические характеристики:
1.5.2. Диаметр пропеллера 125 мм
1.6. BEC (источник питания) 5V 12V , 3A наличие.
1.6.1. Технические характеристики:
1.6.2. Максимальный ток 3 ампер
1.7. Литиевая аккумуляторная батарея, 3S LiPo 2200 mAh наличие
1.7.1. Технические характеристики:
1.7.2. Емкость батареи 2200 мАч
1.7.3. Напряжение батареи 11,1 вольт
1.8. Индикатор уровня заряда батареи (пищалка) наличие
Технические характеристики:
1.8.2. Диапазон измеряемого напряжения от 7,4 до 29,6 вольт
1.9. Зарядное устройство B3 наличие
1.9.1 Технические характеристики:
1.9.2. Выходная мощность 10 Ватт
1.9.3. Максимальное напряжение заряда 12,6 Вольт
1.9.4. Разъем для зарядки JST-XH 4 pin наличие
1.10. Одноплатный микрокомпьютер Raspberry Pi3 Model B+ наличие
1.10.1. Технические характеристики:
1.10.2. Тактовая частота процессора 1,2 ГГц
1.10.3. Количество ядер 4 ядра
1.10.4. Возможность подключения камеры по CSI порту наличие
1.10.5. Оперативная память 1 Гб
1.10.6. USB порты 4 шт
1.10.7. Возможность подключения по bluetooth наличие
1.11. Камера для однопалатного компьютера, Raspberry Pi 3 Camera (G) наличие
1.11.1 Технические характеристики:
1.11.2. Угол обзора камеры 140 градусов
1.11.3 Разрешение камеры 5 Мп
1.12. Лазерный дальномер CJMCU-531 наличие
1.12.1. Технические характеристики:
1.12.2. Дальность измерения расстояния 400 см
1.12.3. Возможность подключения по интерфейсу i2c наличие
1.13. Модуль памяти, MicroSD 16 GB 10 Class с установленным ПО для одноплатного компьютера
наличие
1.13.1 Характеристики ПО для одноплатного компьютера:
1.13.2. Возможность управления полётным контроллером по протоколу MAVLink наличие
1.13.3. Возможность получение полных показаний телеметрии от полётного контроллера на бортовой компьютер наличие
1.13.4. Возможность формирования миссии на бортовом компьютере и передача на полётный контроллер наличие
1.13.5. Число распознаваемых одновременно ArUco-маркеров системой технического зрения 36 шт.
1.13.6. Функция зависания над ArUco-маркером Наличие
1.13.7. Максимальное отклонение при зависании над ArUco-маркером 2 см.
1.13.8. Фреймрейт распознавания ArUco-маркеров 60 кадров/сек кадров/сек
1.13.9. Возможность трансляции HD-видео на мобильное приложение с задержкой 100 МС
1.13.10. Программная среда обеспечивает поддержку получения и детерминирования сигналов с контроллера БВС вместо исполнительных механизмов наличие
1.13.11. Количество доступных показателей телеметрии 30 шт
1.13.12. Возможность соединения с наземной управляющей станцией QGroundControl по Wi-Fi наличие
1.13.13 Возможность беспроводной калибровки датчиков наличие
1.13.14. Возможность строить графики по параметрам телеметрии наличие
1.13.15. 3D-визулизация позиции, ориентации и скорости коптера на внешнем компьютере наличие
1.13.16. Возможность программирования автономного полета квадрокоптера на языке программирования Phyton наличие
1.14. Плата микроконтроллера, Arduino Nano наличие
1.14.1. Технические характеристики:
1.14.2. Флэш-память 16Кб
1.14.3. Тип процессора ATMega 168 наличие
1.14.4. Тактовая частота 16 МГц
1.15. Светодиодная лента адресная, 144 led/m 5V IP65, в метрах (Black) наличие
1.15.1. Технические характеристики:
1.15.2. Количество светодиодов на метр 144 шт
1.15.3 Класс пылевлагозащиты IP55
1.15.4. Длина 40 см
1.16. Кабель Micro-USB (улитка) наличие
1.16.1. Технические характеристики:
1.16.2. Длина 60 см
1.17. Макетная плата, паячная наличие
1.17.1. Технические характеристики:
1.17.2. Количество контактов 270 шт
1.18. Беспаечная макетная плата наличие
1.18.1. Технические характеристики:
1.18.2. Количество контактов 170 точек
1.19. Набор резисторов наличие
1.20. Провод медный многожильный с силиконовой изоляцией, 14 AWG красный+черный наличие
1.20.1. Технические характеристики:
1.20.2. Калибр провода 14 AWG
1.20.3. Длина 20 см
1.21. Термоусадка 5мм (черная+красная) наличие
1.21.1. Технические характеристики:
1.21.2. Термоусадка тип 1
1.21.3. Диаметр 15 мм
1.21.4 Коэффициент усадки 2
1.21.5. Термоусадка тип 2
1.21.6. Диматер 5 мм
1.21.7. Коэффициент усадки 2
1.22. Разъёмы силовые, XT60 plug мама наличие
1.22.1. Технические характеристики:
1.22.2. Максимальная токопроводимость 60 ампер
1.23. Комплект аппаратуры Flysky i6x (10 каналов) с приемником наличие
1.23.1. Технические характеристики:
1.23.2. Количество каналов управления 8 шт
1.23.3. Приемник сигнала наличие
1.23.4 Рабочая частота 2,4 ГГц
1.23.5. Протоколы передачи данных PPM, S-bus, I-bus наличие
1.24. Кабель для симулятора наличие
1.24.1. Технические характеристики:
1.24.2. Совместимость с комплектом радиоаппаратуры управления наличие
1.24.3. Возможность подключения к компьютеру по интерфейсу USB наличие
1.25. Соединительный кабель для телеметрии и полетных контроллеров наличие
1.25.1. Технические характеристики:
1.25.2. Количество пин-соединений для подключения 3 соединения на концах кабеля
1.25.3. Длина 15 см
1.26. Комплект соединительных проводов для Arduino и макетных плат мама-мама наличие
1.26.1. Технические характеристики:
1.26.2. Длина 20 см
1.26.3. Тип соединения мама-папа, папа-папа, папа-мама наличие
1.26.4. Количество проводов каждого типа 10 шт
1.27. Рама квадрокоптера наличие
1.27.1. Технические характеристики:
1.27.2. Материал рамы карбон
1.27.3. Количество составных частей 7 шт
1.27.4. Расстояние между центрами моторов 235 мм
1.27.5. Габаритные размеры рамы квадрокоптера в собранном виде 251×251мм
1.28. Защита пропеллеров совместимая с рамой квадрокоптера наличие
1.28.1. Технические характеристики:
1.28.2. Материал защиты пропеллеров поликарбонат
1.28.3. Количество составных частей 24 шт
1.28.4. Габаритные размеры собранной защиты 365х365 мм
1.29. Комплект крепежа необходимый для сборки квадрокоптера наличие
1.29.1. Технические характеристики:
1.29.2. Саморез 2х5 черный 8 шт
1.29.3. Винт М3х6 ISO 7380 10.9 черный 10 шт
1.29.4. Винт М3х8 ISO 7380 10.9 черный 45 шт
1.29.5. Винт М3х10 ISO 7380 10.9 черный 65 шт
1.29.6. Гайки стальная c нейлоновой вставкой М3 DIN985 50 шт
1.29.7. Гайка нейлоновая М3 (черная) 20 шт
1.29.8. Стойки нейлоновая HTS-306 (черная) 15 шт
1.29.9. Стойки нейлоновая HTS-320 (черная) 5 шт
1.29.10. Стойки нейлоновая HTP-315 (черная) 10 шт
1.29.11. Стойки нейлоновая HTP-330 (черная) 15 шт
1.29.12. Стойки нейлоновая HTP-340 (черная) 20 шт
1.29.13. Стойка демпферная М3х6 5 шт
1.29.14. Стойка аллюминиевая L-30мм (черная) 5 шт
1.29.15. Стойка аллюминиевая L-40мм (черная) 5 шт
1.29.16. Резиновые проставки для ног (шайбы) 10 шт
1.29.17. Клейкая лента двусторонняя, 3М (квадрат) 10 шт
1.29.18. Ремешок для батареи, 150 мм 2 шт
1.29.19. Велкро-липучка 10см
1.29.20. Крепеж, стяжка кабелная пластиковая неразъемная 2,5х120мм (черная) 25 шт
1.30. Комплект ручного инструмента наличие
1.30.1. Технические характеристики:
1.30.2. Отвертка под шестигранник 2мм 1 шт
1.30.3. Ключ шестигранный 2мм 1 шт
1.30.4. Отвертка торцевая 5.5мм (под м3) 1 шт
1.30.5. Отвертка PH1 (мал) 1 шт
1.30.6. Бокорезы (мал) 1 шт
1.30.7. Ключ для пропеллеров 1 шт
1.31. USB-флешка COEX с методическими материалами наличие
1.31.1. Технические характеристики:
1.31.2. Учебные планы на 72 и 144 часа наличие
1.31.3. Методические материалы на 72 и 144 наличие
1.31.4. Учебные видеокурсы по сборке, настройке и программированию от производителя в электронном виде на сайте наличие
1.32. Комплект ArUco маркеров 6шт
1.32.1. Технические характеристики:
1.32.2. Размер 210х210 мм
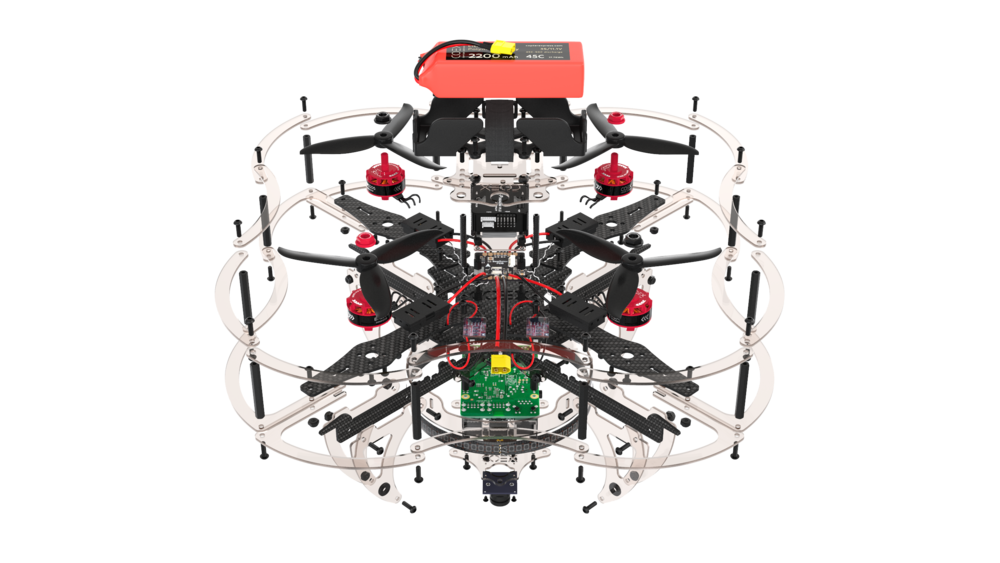
Процесс сборки квадрокоптера
- Home
- Дроны
- Конструктор программируемого квадрокоптера «COEX Клевер 4 CODE»
Конструктор программируемого квадрокоптера «COEX Клевер 4 CODE»
Стоимость от
Конструктор программируемого квадрокоптера «COEX Клевер 4 CODE»
199 000₽
Учебный набор «COEX Клевер 4 Code» предназначен для практико-ориентированного обучения школьников и студентов конструированию и прикладному программированию. Полноценно подходит для участия в инженерно-технических соревнованиях и использования в проектной деятельности в школах и университетах, как модульная open source платформа по летающей робототехнике.
Количество товара Конструктор программируемого квадрокоптера «COEX Клевер 4 CODE»
-
Детали
Детали
| Габариты | 35.5 × 35.5 × 19.5 см |
|---|
Конструктор программируемого квадрокоптера «COEX Клевер 4 CODE» предназначен для практико-ориентированного обучения школьников и студентов конструированию и прикладному программированию. Полноценно подходит для участия в инженерно-технических соревнованиях и использования в проектной деятельности в школах и университетах, как модульная open source платформа по летающей робототехнике.
Модель
СОЕХ КЛЕВЕР 4
WORLDSKILLS RUSSIA
Размер – 355x355x195 мм
Расстояние между моторам по диагонали – 234 мм
Диаметр пропеллеров – 5 дюймов
Максимальный взлетный вес – 1 кг
Максимальная скорость – 72 км/ч
Максимальное время полета – 15 мин
Диапазон рабочих температур – От 0°С до +40°С
Максимальная высота полета – 500 м