Посадочная радиомаячная группа ПРМГ-76УМ

Посадочная радиомаячная группа обеспечивает заход на посадку днем и ночью на полевые и стационарные аэродромы, при метеоминимумах I, II категории ICAO в режимах ручного, полуавтоматического и автоматического управления самолетов, оборудованных совместимой аппаратурой.
- принцип формирования рабочих зон, стабильность выходных параметров, как у ПРМГ-76У
- аппаратура переведена на современную микропроцессорную элементную базу
- энергопотребление основной аппаратурой уменьшено в 2 раза
- автоматическое переключение на резервную сеть
- непрерывная круглосуточная работа без постоянного присутствия обслуживающего персонала
- возможность оперативного демонтажа аппаратуры для размещения в стационарном помещении
- рекомендуется для использования на стационарных аэродромах в режиме дистанционного управления с КДП.
Может использоваться на полевых и временных аэродромах.
Комплектация:
- глиссадный радиомаяк (ГРМ)
- курсовой радиомаяк (КРМ)
- ретранслятор дальномера (РД), размещенный совместно с КРМ в аппаратной дальномерно-курсового радиомаяка (ДКРМ)
- аппаратура телеуправления и телесигнализации (ТУ-ТС), устанавливаемая на КДП
Источник
ЗАНЯТИЕ 3 «РАДИОТЕХНИЧЕСКИЕ СРЕДСТВА ПОСАДКИ»
1 ВОПРОС «РАДИОМАЯЧНАЯ СИСТЕМА ИНСТРУМЕНТАЛЬНОЙ ПОСАДКИ (ПРМГ)»
НАЗНАЧЕНИЕ : Посадочная радиомаячная группа (ПРМГ) предназначена для обеспе-

Размещение ПРМГ на аэродроме.
КУРСОВОЙ РАДИОМАЯК
КРМ устанавливается на продолжении продольной оси ВПП на расстоянии
| 500¸1200 м от её торца, со стороны, противоположной заходу на посадку. |
| Принцип действия КРМ заключается в создании в горизонтальной плоскости двух- |
| лепестковой ДН. Вертикальная плоскость, проходящая через точки пересечения ле- |
| пестков, является плоскостью равносигнального направления (РСН), совпадающей с |
| плоскостью посадочного курса. При заходе на посадку сигналы КРМ принимаются |
| азимутальным каналом самолётной аппаратуры РСБН, нагрузкой которого явля- |
| ются курсовая планка и бленкер «К» ноль-индикаторного прибора. К курсовой планке |
| подводится разностное (UD=UЛ – UП), а к бленкеру суммарное (US =UЛ + UП) напря- |
| жение. Если самолёт находится на РСН, то UЛ = UП , кроме того UЛ ¹ 0, UП ¹ 0. |
| Следовательно, UD=0 (курсовая планка находится в центре кружка), US ¹ 0 (бленкер |
| “К” закрывается, разрешая снимать показания). Если же самолёт отклонится от |
| посадочного курса, то UD¹ 0, (т.к. UЛ ¹ UП) и курсовая планка отклонится в сторо- |
| ну, противоположную отклонению самолёта. |
| Зона действия КРМ в вертикальной плоскости 1¸7°, в горизонтальной ±15°. |
| Дальность действия 50 км. |

ГЛИССАДНЫЙ РАДИОМАЯК
| ГРМ устанавливается на удалении 120¸180 м от продольной оси ВПП. Расстоя- |
| ние от ГРМ до торца ВПП зависит от выбранного угла наклона глиссады и лежит |
| в пределах 200¸450 м (при оптимальном угле глиссады 2°40¢ оно равно320м). |
| Принцип действия ГРМ аналогичен принципу действия КРМ. Однако двухлепест- |
| ковая ДН создаётся в вертикальной плоскости. РСН совпадает с глиссадой планиро- |
| вания. Сигналы ГРМ принимаются дальномерным каналом самолётной РСБН, на- |
| грузкой которого являются глиссадная планка и бленкер «Г» того же прибора. |
| Принцип обработки сигнала аналогичен выше описанному. |
| Зона действия ГРМ в горизонтальной плоскости составляет ±8° относительно |
| оси ВПП. Дальность действия около 18 км. |
РЕТРАНСЛЯТОР ДАЛЬНОМЕРА
| РД устанавливается совместно с ГРМ. Он предназначен для определения наклон- |
| ной дальности от самолёта, совершающего посадку, до точки приземления путём |
| ретрансляции запросных сигналов дальности, излучаемых дальномерным каналом |
| бортовой РСБН. Информация выдаётся лётчику на цифровой индикатор. |
| Зона действия РД в горизонтальной плоскости составляет ±15° относительно |
| оси ВПП, в вертикальной плоскости 0¸7°. Дальность действия – 50 км. |
2 ВОПРОС «УПРОЩЁННАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА ПОСАДКИ»
НАЗНАЧЕНИЕ –Упрощённая РТС посадки предназначена для привода самолёта на аэ-
| родром посадки, вывода его на посадочный курс и приборного снижения вне види- |
| мости земли до высоты 50÷80 м при ручном пилотировании самолёта. |
| САМОЛЁТНОЕ ОБОРУДОВАНИЕ | НАЗЕМНОЕ ОБОРУДОВАНИЕ |
| 1)Автоматический СВ радиокомпас (АРК); 2)Маркерный радиоприёмник; 3)Самолётная УКВ радиостанция; 4)Радиовысотомер малых высот (РВ). | 1)Приводные радиомаяки (ДПРМ, БПРМ); 2)УКВ радиопеленгатор (АРП); 3)Светотехнические средства (СТС). |

Размещение на аэродроме упрощённой РТС посадки
ПРИВОДНЫЕ РАДИОМАЯКИ
ДПРМ –(дальний приводной радиомаяк) состоит из:
| — дальней приводной радиостанции (ДПРС); |
| — маркерного радиомаяка (МРМ). |
| ДПРС предназначена для привода самолёта на аэродром посадки и вывода его на |
| посадочный курс, а также для организации аварийного 21-го канала связи. В качест- |
| ве ДПРС используются ПАР-8СС, ПАР-10. |
БПРМ –(ближний приводной радиомаяк) состоит из:
| — ближней приводной радиостанции (БПРС); |
| — маркерного радиомаяка (МРМ). |
| БПРС предназначена для выдерживания направления полёта с посадочным курсом |
| после пролёта ДПРС. В качестве БПРС используются ПАР-9М2. |
МАРКЕРНЫЕ РАДИОМАЯКИ.
Это радиопередающие устройства, работающие на частоте 75 МГц, и предназна-
| ченные для обозначения на борту самолёта момента пролёта над ДПРМ и БПРМ. |
| Антенна МРМ формирует ДН специальной формы, благодаря чему сигналы МРМ |
| принимаются на самолёте только при пролёте над маяком (возможно с некоторым |
| боковым смещением от оси ВПП). |

Диаграмма направленности МРМ
Дальний МРМ излучает сигнал в виде серии тире (2 тире в секунду), ближний –
| серию точек (6 точек в секунду). На борту самолёта сигналы МРМ принимаются |
| маркерным радиоприёмником (МРП). |
ПОСАДКА ПО УПРОЩЁННОЙ СИСТЕМЕ:
При заходе на посадку лётчик контролирует курс посадки, выдерживая при этом
| КУР=0, сначала пеленгованием ДПРС, затем БПРС. Перестройка АРК с частоты |
| ДПРС на частоту БПРС производится автоматически по сигналу дальнего МРМ |
| (при выпущенных шасси). |
| Контроль высоты осуществляется с помощью бортового РВ в двух точках: |
| над ДПРМ: 200¸220 м; над БПРМ: 50¸80 м. |
| После прохода БПРМ дальнейшее управление самолётом осуществляется с визу- |
| альным использованием наземных светотехнических средств. |
| На случай отказа наземного ПАР или самолётного АРК в состав упрощённой РТС |
| входит АРП, расположенный в районе ДПРМ. При этом лётчик выдерживает поса- |
| дочный курс по голосовым командам руководителя зоной посадки (РЗП). |
ЗАНЯТИЕ 4 «НАЗЕМНЫЕ СВЕТОТЕХНИЧЕСКИЕ СРЕДСТВА»
Источник
Принцип работы ГРМ-5 по структурной схеме




![]()
![]()
Назначение, состав, размещение на аэродроме ПРМГ-5.
Посадочная радиомаячная группа ПРМГ-5 предназначена для вывода самолетов, оборудованных бортовой аппаратурой систем РСБН-2, РСБН-4 и их модификаций, на ВПП аэродрома днем и ночью при минимумах погоды I и II категорий при ручном, директорном и автоматическом управлении ЛА. В состав ПРМГ-5 входят:
1) дальномерно-курсовой радиомаяк (ДКРМ);
2) глиссадный радиомаяк (ГРМ).
Дальномерно-курсовой радиомаяк состоит из:
1) курсового радиомаяка (КРМ);
2) ретранслятора-дальномера (РД).
Аппаратура каждого из радиомаяков (ДКРМ и ГРМ) размещена в автомобиле УАЗ-452 АЭ.
ДКРМ устанавливается на продолжении оси ВПП на расстоянии 500-1150 м от ее конца. Допускается отклонение от оси ВПП не более ±1 м.
ГРМ размещается в пределах от 200 до 450 м от торца ВПП и 120-180м от ее оси.
Назначение, состав, ТТХ аппаратуры ГРМ-5.
Глиссадный радиомаяк предназначен для управления самолетом, оборудованным аппаратурой системы РСБН-2С (или ее модификациями), для выдерживания глиссады планирования в сложных метеоусловиях днем ночью.
— блок измерителя мощности БИМ;
— контрольно-выносной пункт КВП-Г;
— устройство контроля зоны УКЗ;
— измеритель коэффициента разнослышимости ИКР;
— блок модулятора-калибратора (БМК);
· Дальность действия – 18 км для ГРМ,
· Диапазон частот передающих устройств: ГРМ, РД: 939,6 — 966,9 МГц;
Принцип работы ГРМ-5 по структурной схеме.
Низкочастотные сигналы частотой 2100 и 1300 Гц формируются в блоке модулятора-калибратора (БМК), который также предназначен для формирования калиброванных значений сигнала посадки, необходимых для настройки и проверки наземной контрольно – измерительной аппаратуры, а также сигнала управления (коммутации) фазой ВЧ-колебаний (12,5 Гц) в разностном канале фидерного тракта.
НЧ-сигналы 2100 и 1300 Гц поступают в блок передатчика БП-Г, который предназначен для генерирования ВЧ посылок типа «меандр». Промодулированный ВЧ-сигнал передатчика передается в блок измерителя мощности (БИМ). Блок БИМ предназначен для измерения проходящей мощности передатчика и выдачи сигнала АВАРИЯ при уменьшении мощности до 4 Вт (50% от номинальной).
С выхода блока измерителя мощности ВЧ сигнал, промодулированный частотами 2100 и 1300 Гц, поступает на линейку фидерного тракта (ЛФТ), а сигнал АВАРИЯ, в случае уменьшения мощности до 50% поступает в блок автоматического резервирования (БАР).
С блока модулятора-калибратора на ЛФТ подается и сигнал коммутации 12,5 Гц. Линейка фидерного тракта формирует сигналы для питания суммарного и разностного входов антенной системы ГРМ. При этом на суммарный вход поступает ВЧ-сигнал, промодулированный частотами 2100 и 1300 Гц с неизменной фазой, а на разностный вход ВЧ-сигналы, промодулированные частотами 2100 и 1300 Гц, но фаза ВЧ-сигнала 1300 Гц сдвинута на 180 о относительно сигнала этой частоты на суммарном входе антенной системы ГРМ.
С выходов ЛФТ сигнал на разностной вход антенной системы ГРМ поступает непосредственно через фидерный переключатель, а на суммарный вход – через фидерный переключатель и детекторную секцию.
Фидерный переключатель осуществляет подключение антенной системы ГРМ к работающему комплекту радиоаппаратуры и при выходе этого комплекта из строя обеспечивает автоматическое переключение антенной системы на резервный комплект.
Детекторная секция используется для измерения КРС на суммарном входе антенной системы ГРМ.
Антенная система ГРМ формирует в пространстве равносигнальную зону посадки. Причем зона посадки такова, что сверху относительно направления захода самолета на посадку преобладает ВЧ-сигнал, промодулированный частотой 1300 Гц, а снизу – частотой 2100 Гц.
Контроль постоянства нахождения зоны глиссады и ее крутизны осуществляется контрольно-выносным пунктом (КВП-Г) и приборами, измеряющими коэффициент разнослышимости сигналов (ИКР).
Источник
Применение:
Посадочная радиомаячная группа обеспечивает заход на посадку днем и ночью на полевые и стационарные аэродромы, при метеоминимумах I, II категории в режимах ручного, полуавтоматического и автоматического управления самолетов, оборудованных совместимой аппаратурой
Отрасль/Область применения:
Описание:
К основным особенностям посадочной радиомаячной группы ПРМГ-76УМ относятся следующие:
• принцип формирования рабочих зон, стабильность выходных параметров как у ПРМГ-76У;
• аппаратура переведена на современную элементную базу;
• энергопотребление основной аппаратурой уменьшено в 2 раза;
• автоматическое переключение на резервную сеть;
• непрерывная круглосуточная работа без постоянного присутствия обслуживающего персонала;
• возможность оперативного демонтажа аппаратуры для размещения в стационарном помещении.
Дополнительные материалы:
Характеристики продукта (ТТХ):
| Характеристика | Единица измерения | Значение |
|---|---|---|
| Дальность действия курсового радиомаяка, не менее | км | 45 |
| Дальность действия глиссадного радиомаяка, не менее | км | 18 |
| Дальность дейсвия ретранслятора дальномера, не менее | км | 45 |
| Диапазон частот КРМ | МГц | 905,1 – 932,4 |
| Диапазон частот ГРМ | МГц | 939,6 – 966,9 |
| Диапазон частот РД (в режиме приема) | МГц | 772–808 |
| Диапазон частот РД (в режиме передачи) | МГц | 939,6–966,9 |
| Угол наклона глиссады | град | от 2 до 4 |
| Организация | Описание | Регион | Адрес | Контакты |
|---|---|---|---|---|
| АО «ЧРЗ «Полет» | Производитель | Челябинская область | 454080, г. Челябинск, ул. Тернопольская, д. 6 |
|
Статус внесения в реестр Минпромторга:
«»
11.05.2016
Челябинский радиозавод «Полет» завершил крупные экспортные поставки наземных радиотехнических средств
В апреле 2016 года завод успешно выполнил поставки зарубежным заказчикам пяти изделий: посадочной радиомаячной группы ПРМГ-76УМ и радиотехнической системы ближней навигации РСБН-4НМ для заказчика из Анголы; радиолокатора АОРЛ-1АС и двух комплексов, включающих азимутальные и дальномерные радиомаяки РМА-2010/РМД-2010, для заказчика из Ирака.
Всего завод выпустил уже около 60 посадочных радиомаячных групп, 40 радиотехнических систем ближней навигации и 30 аэродромных радиолокаторов АОРЛ-1АС нового поколения. Изделия АО «ЧРЗ «Полет» успешно эксплуатируются на большинстве аэродромов России и ряда зарубежных стран.
«Поступление денежных средств за поставки, в том числе и экспортные, позволяет выплачивать работникам заработную плату и повышать уровень производственно-хозяйственной деятельности предприятия, — уточнил временный генеральный директор АО «ЧРЗ «Полет» Сергей Пилат. – По ряду изделий основной номенклатуры завод обеспечен заказами практически до 2018 года, договоры заключены как с отечественными, так и с зарубежными заказчиками». Ведутся переговоры о заключении контрактов еще с несколькими потенциальными заказчиками.
АО «ЧРЗ «Полет» изготавливает ряд наземных радиотехнических средств обеспечения полетов, не имеющих аналогов в России и за рубежом. Изделия завода способны круглосуточно работать на аэродромах без постоянного присутствия обслуживающего персонала. Перспективная аппаратура разработана с использованием самой современной электронно-компонентной базы и передовых технических решений.
Челябинский радиозавод «Полет» основан в 1952 году как базовое предприятие для производства наземного радиотехнического оборудования в интересах гражданской авиации и Министерства обороны. Здесь впервые в стране был освоен выпуск маркерных маяков, радиопеленгаторов, азимутально-дальномерных маяков, радиомаячных систем посадки, аэродромных обзорных радиолокаторов.
Сегодня АО «ЧРЗ «Полёт» является одним из ведущих предприятий России по разработке и серийному производству радиолокационного и радионавигационного оборудования для управления воздушным движением, аппаратуры цифровых систем связи и передачи информации. Оборудование челябинского радиозавода «Полёт» эксплуатируется на большинстве аэродромов страны. Изделия с маркой «Полёт» работают в 30 странах на четырех континентах.
Постановлением Правительства РФ от 21.04.2014г. №365 АО «ЧРЗ «Полет» включено в образованное в составе Госкорпорации «Ростех» АО «Объединенная приборостроительная корпорация».
Справка о продукции АО «ЧРЗ «Полет»
Посадочная радиомаячная группа ПРМГ-76УМ обеспечивает заход на посадку днем и ночью на полевые и стационарные аэродромы при метеоминимумах I-II категории ICAO в режимах ручного, полуавтоматического и автоматического управления самолетов, оборудованных совместимой бортовой аппаратурой. Система не имеет аналогов в России.
Радиотехническая система ближней навигации – основное средство ближней навигации на авиатрассах, при заходе на посадку самолетов и вертолетов. РСБН-4НМ обладает высокой точностью приема-передачи данных, которая не зависит от условий видимости. Система обеспечивает непрерывное указание экипажам местоположения воздушного судна, автоматический привод самолета в любую заданную точку в зоне действия системы, а также наземный контроль за движением самолетов, работающих с маяком.
Новое поколение наземной аппаратуры РСБН и ПРМГ переведено на современную микропроцессорную элементную базу. Системы оснащены автоматическим переключением на резервную сеть и способны круглосуточно работать без постоянного присутствия обслуживающего персонала.
АОРЛ-1АС – аэродромный обзорный радиолокатор, предназначенный для установки в аэропортах с любой интенсивностью полетов, в том числе с автоматизированными системами управления воздушным движением, имеющий высокие тактико-технические характеристики и принятый на оснащение Росавиацией.
Комплекс азимутально-дальномерных радиомаяков предназначен для непрерывного указания экипажам летательных аппаратов азимута и дальности по отношению к месту расположения радиомаяков. Включает в себя азимутальный радиомаяк РМА-2010 формата VOR и дальномерный радиомаяк РМД-2010 формата DME. Данные радиомаяки рекомендованы ICAO как основные средства обеспечения полетов самолетов гражданской авиации.

8. 1. 1 Назначение и классификация систем посадки В зависимости от назначения и количества решаемых задач системы посадки подразделяются на упрощенные и комплексные. Упрощенные системы обеспечивают привод самолетов в район аэродрома, выполнение посадки и дискретное указание расстояния до начала ВПП. К комплексным относятся радиомаячные системы посадки, которые решают задачи упрощенных систем и, кроме того, непрерывно выдают летчику информацию о положении самолета по курсу посадки и относительно глиссады планирования, а также позволяют регулировать воздушное движение. Глиссадой планирования или просто глиссадой называется линия пересечения плоскости планирования с плоскостью посадочного курса. Основными требованиями к системам посадки являются: 1. Высокая точность и надежность работы системы. 2. Высокая пропускная способность системы. 3. Высокая помехозащищенность по отношению к естественным и искусственным помехам. 4. Обеспечение индивидуального опознавания самолетов. 5. Возможность размещения наземной аппаратуры системы вне ВПП и на таком удалении от нее, чтобы обеспечивалась безопасность снижения и приземления самолетов. 6. Технические средства привода самолетов должны предусматривать обеспечение непрерывного и надежного указания экипажу самолета направления на аэродром посадки и расстояния до него. 7. Технические средства управления воздушным движением должны обеспечивать роспуск групп самолетов для выполнения посадки, точное и надежное управление их движением с последовательным и упорядоченным выведением отдельных самолетов на посадку, а также предупреждение столкновений и обеспечение экипажей самолетов информации относительно рельефа местности и опасных зон с точки зрения погодных условий.
 две приводные аэродромные радиостанции")
УПРОЩЕННАЯ СИСТЕМА ПОСАДКИ Наземное оборудование упрощенной системы посадки включает: а) две приводные аэродромные радиостанции /ПАР/; б) два три маркерных радиомаяка /МРМ/; в) связные командно стартовые радиостанции /КСРС/ г) ультракоротковолновые радиопеленгаторы /РП/ д) светотехническое оборудование В состав бортового РЭО упрощенной системы посадки входят: а) УКВ радиостанция; б) автоматический радиокомпас /АРК/; в) радиовысотомер малых высот /РВМ; г) радиоприемник сигналов маркерного радиомаяка /МРП/ Управление движением самолетов в районе аэродрома, их взлетом и посадкой осуществляется с командно диспетчерского /КДП/ или командно стартового пункта. Привод самолетов осуществляется на дальнюю приводную радиостанцию с помощью АРК на расстоянии порядка 200 км. Момент полета над дальней ПАР фиксируется по сигналам маркерного маяка (два тире в секунду) принимаемым маркерным радиоприемником.

Комплексная РАДИОМАЯЧНАЯ СИСТЕМА ПОСАДКИ В радиомаячную систему посадки входит все оборудование как самолетное, так и наземное упрощенной системы посадки и дополнительно в наземное оборудование входят: а) обзорный и диспетчерский радиолокаторы /OPЛ, ДРЛ/; б) радиопеленгаторы /РП/; в) радиодальномер; г) счетно решающие устройства; д) курсовой радиомаяк; е) глиссадный радиомаяк В самолетное оборудование входят: а) курсовой радиоприемник /КРП/; б) глиссадный радиоприемник /ГРП/; в) самолетный дальномер /СД/; г) радиотехническая система ближней навигации РСБН 2 С, 6 С, 7 С Курсовой радиомаяк создает радиосигнальное направление, совпадающие с плоскостью посадочного курса (равносигнальную плоскость). Глиссадный радиомаяк предназначен для указанию экипажу плоскости планирования, с которой совпадает создаваемая маяком радиосигнальная плоскость. Счетно-решающие устройства обрабатывают информацию о прибывающих и находящихся на аэродромах самолетах, по которой определяется очередность посадки и порядок движения самолетов.

РАДИОЛОКАЦИОННАЯ СИСТЕМА ПОСАДКИ Радиолокационные системы посадки отличаются от рассмотренных тем, что на самолете нет ни каких устройств, указывающих экипажу направления посадки и глиссаду снижения. Все управление движением самолета, заходящего на посадку по радиолокационной системе выполняется с земли. Необходимые команды о курсе, высоте и другие данные с КДП передаются по радио на самолет. По этой причине радиолокационные системы находят широкое применение для посадки самолетов фронтовой авиации. В состав радиолокационной системы посадки входит оборудование упрощенной системы, кроме этого в наземное оборудование входит: а) диспетчерский радиолокатор /ДРЛ/; б) посадочный радиолокатор /ПРЛ/ В самолетное оборудование входит самолетный ответчик СО 69 (СО 63). ПРЛ является основным радиотехническим устройством, обеспечивающим посадку самолетов по системе РСП. Он определяет собой импульсный радиолокатор сантиметрового диапазона и позволяет с высокой точностью одновременно определять азимут, угол места и дальность самолета по отношению к ВПП после его выхода в плоскость посадочного курса. Дальность посадочного радиолокатора составляет 50 60 км, ошибка в определении места самолета не превышает 150 м по дальности, 40 м по азимуту. Глиссаду самолета с помощью радиолокатора можно определить с ошибкой не более 1°. Для повышения дальности действия системы и точности измерения координат обычно предусматривается активный режим работы с самолетным ответчиком, который принимает сигналы посадочного радиолокатора и излучает ответные сигналы в другом диапазоне волн. Сигналы ответчика принимаются специальным приемником.

НАЗНАЧЕНИЕ, ТАКТИКО ТЕХНИЧЕСКИЕ ДАННЫЕ И ПРИНЦИП ДЕЙСТВИЯ МПР 56 П Маркерный радиоприемник МПР 56 П предназначен для световой и звуковой сигнализации летчику о пролете над дальним и ближним приводами, работает совместно с маркерными маяками и определяет момент пролета маркерных радиомаяков. Выдерживая при этом заданную высоту по радиовысотомеру, летчик обеспечивает снижение самолета по глиссаде. Маркерный радиомаяк представляет собой маломощный передатчик метрового диапазона с направленной характеристикой излучения. Антенна радиомаяка устанавливается на продолжении оси ВПП и имеет вытянутую диаграмму направленности в вертикальной плоскости. Сечение диаграммы направленности горизонтальной плоскостью в направлении оси ВПП более сжато, чем в направлении перпендикулярном оси ВВП. Вытянутость диаграммы направленности в вертикальной плоскости и соответствующая мощность передатчика маркерного радиомаяка обеспечивает прием сигналов МРП самолетным приемником в значительном диапазоне высот. Сжатость зоны облучения направленности оси ВПП повышает точность отметки места расположения МРМ вследствие малого времени пролета самолета зоны облучения. Небольшая вытянутость сечения диаграммы направленности в направлении, перпендикулярном оси ВПП, предотвращает возможность пролета самолета мимо зона МРМ в тех случаях, когда самолет при посадке имеет большое отклонение от плоскости посадочного курса.

ТТД 1. Рабочая частота МРП-56 П f. Н = 75 МГц 2. Частота модуляции FH = 3000 Гц, глубина модуляции 30% 3. Чувствительность 1, 5. . 3 м. В 4. Полоса пропускания по высокой частоте на уровне 0, 5 не уже 0, 7 МГц 5. Полоса пропускания по низкой частоте на уровне 0, 5 700. . 1100 Гц /0, 7 к. Гц/ 6. Реле радиоприемника срабатывает при токе не более 7 МА, отпускает при токе 4 МА. 7. Питание производится от бортовой сети самолета напряжением 27 В. Комплектация МРП-56 1. Приемник. 2. Внутрифюзеляжная антенна. 3. Блок сигнализации. 4. Лампочка сигнализации. Внутрифюзеляжная антенна маркерного радиоприемника устройства МРП 56 П с электрической точки зрения представляет собой несимметричный, сильно укороченный вибратор, расположенный внутри металлической плоскости и настроенный в резонанс с помощью нагрузочных конденсаторов. Сигнал маркерного радиоприемника используется в цепях коммутации автоматического радиокомпаса АРК 19 при заходе самолета на посадку. Маркерный радиоприемник МРП 56 П является частью системы слепой посадки самолетам по приборам.

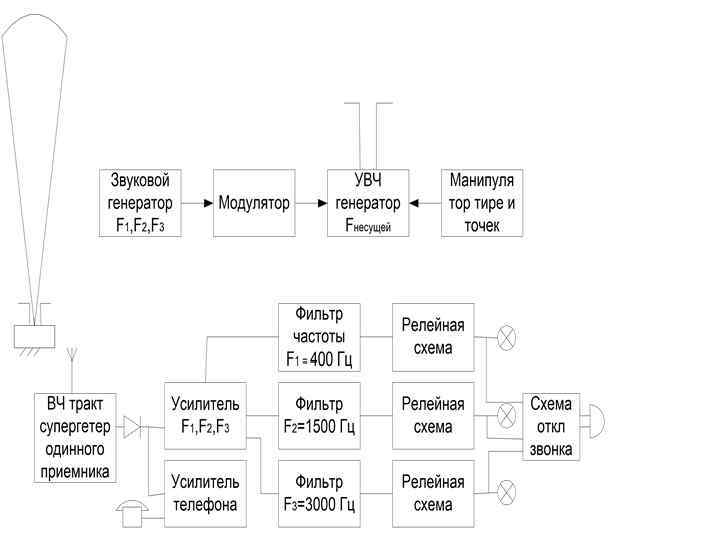
Диаграмма направленности антенны и структурная схема МРМ, а также блок схема бортовой аппаратуры показаны на рис. 13 Маркерный канал работает на частоте 75 МГц. По международному стандарту вдоль продолжения ВПП со стороны захода самолета на посадку устанавливается 3 маркерных радиомаяка МРМ, которые сигнализируют пилоту о расстоянии самолета до начала ВПП. При этом несущая ближнего к ВПП модулируется частотой 3000 Гц, среднего – 1300 Гц и дальнего от ВПП – 400 Гц. Глубина модуляции составляет 95± 4%. Для опознавания МРМ низкая частота манипулируется. В системе ILS принята следующая манипуляция: ближний МРМ – непрерывная последовательность точек, средний МРМ непрерывная последовательность чередующихся тире и точек, дальний МРМ – непрерывная последовательность тире. Тире передаются 2 раза в секунду, точки 6 раз в секунду, причем время передачи сигналов составляет для дальнего МРМ 12 ± 4 с, среднего 6± 2 с, ближнего 5± 1 с при снижении со скоростью 178 км/ч.
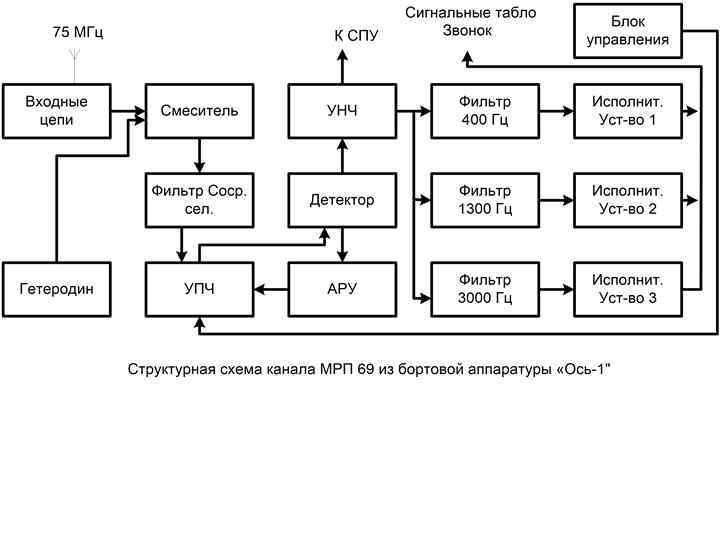

Принцип работы маркерного радиоприемника Сигнал с частотой 75 МГц, принятый антенной, поступает по высокочастотному кабелю на вход усилителя высокой частоты (УВЧ), усиливается и подается на детектор. Продетектированный сигнал подается на вход усилителя низкой частоты (УНЧ) и усиленное напряжение частотой 3000 Гц, выпрямляется диодным выпрямителем и поступает на вход усилителя постоянного тока (УПТ), в анодную цепь которого включено исполнительное реле. При отсутствии сигналов на входе приемника усилитель постоянного тока заперт напряжением 7, 5. . 8 В. При наличии сигнала определенной величины на входе приемника срабатывает реле, при этом его контакты замыкают цепь напряжения 27 В. Сигнал маркерного радиоприемника в виде +27 В поступает в САУ для коррекции передаточных чисел на приемник АРК для переключения с дальней приводной радиостанции на ближнюю и через коробку управления связью звуковой сигнал на блок БСС СПУ 9. Состав маркерного радиоприемника МРП 56 П : приемник; блок питания; фильтр ФК 74; антенна; блок сигнализации; коробка управления связью (из комплекта радиостанции Р 862); комплект кабелей и фидеров; сигнальная лампа с трафаретом «Маркер» . Мощность, потребляемая МРП 56 П по цепи 115 В 400 Гц 10 Вт, по цепи 27 В — Вт. Включение маркерного радиоприемника производится включателем АЗК «РВ МРП» , при включенных АЗК «Радиооборуд. » и выключателях «Аккум. борт, аэродром. » , «Генер. ~ тока» и «Б/Системы» .
 и глиссадного (ГРМ) радиомаяков и ретранслятора")
ПРМГ Посадочная радиомаячная группа. Комплект оборудования курсового (КРМ) и глиссадного (ГРМ) радиомаяков и ретранслятора дальномера. Применялась обычно на аэродромах военного базирования СССР. Бортовые комплекты РСБН обеспечивают приём сигналов ПРМГ, что позволяло использовать её совместно с наземной станцией РСБН в качестве системы обеспечения захода на посадку. С данным режимом захода связан термин «Заход по «Катету». Вероятно «Катет» название одной из модификаций ПРМГ. Краткое описание ПРМГ 76 Модернизированная инструментальная система посадки ПРМГ 76 УМ обеспечивает заход на посадку днем и ночью на полевые стационарные аэродромы при метеоминимумах I, II категории ICAO в режимах ручного, полуавтоматического и автоматического управления самолетов, оборудованных аппаратурой РСБН 2 С или ее модификациями. Рекомендуется для использования на стационарных аэродромах в режиме дистанционного управления с КДП. Может использоваться на полевых и временных аэродромах. Состав: глиссадный радиомаяк (ГРМ) курсовой радиомаяк (КРМ) ретранслятор дальномера (РД), размещенный совместно с КРМ в аппаратной дальномерно курсового радиомаяка (ДКРМ) аппаратура телеуправления и телесигнализации (ТУ ТС), устанавливаемая на диспетчерском пункте

Радиотехническая система РСБН позволяет в зоне действия решать следующие задачи самолетовождения: непрерывно определять место самолета; выполнять полет по заданному маршруту; выводить самолет в любую заданную точку независимо от условий видимости с указанием момента подхода к точке и момента ее пролета; определять навигационные элементы полета (ФМПУ, путевую скорость самолета и угол сноса); осуществлять контролируемое пробивание облачности и заход на посадку. РСБН 85
 с переключающими ДН Принцип формирования линии курса")
Система посадки ПРМГ 4 ( «Катет» ) с переключающими ДН Принцип формирования линии курса и глиссады с фиксацией направления путем сравнения глубин модуляции двух амплитудно модулированных сигналов может быть реализован также при поочередном излучении сигналов антеннами радиомаяка. КРМ системы «Катет» работает на частоте азимутальных каналов. Для указания глиссады планирования используется излучение глиссадного радиомаяка, работающего на частоте дальномерного канала. В диапазоне дециметровых волн нашли применение амплитудные курсовые и глиссадные равносигнальные и радиомаяки с «опорным нулем» . Диаграммы направленности радиомаяков создаются в пространстве поочередно с частотой коммутации Fком. Излучаемые сигналы модулируются по амплитуде напряжением прямоугольной формы ( «меандр» ) с частотой F 1 в одной ДН и F 2 в другой. Структурные схемы каналов курса и глиссады аналогичны и отличаются только диаграммами направленности антенн и несущими частотами каналов. Бортовое оборудование отработки сигналов строится по схеме, применяемой в каналах курса и глиссады систем посадки с обычными равносигнальными радиомаяками или с радиомаяками с «опорным нулем» . Основным параметром, характеризующим индикацию курса и глиссады, для амплитудных дециметровых систем является коэффициент разнослышимости (КРС) КРС = (Um 1 Um 2) /(Um 1 +Um 2), где Um 1 и Um 2 – амплитуды сигналов, модулированных соответственно частотами F 1 и F 2. Отклонение от равносигнальных зон курса и глиссады определяется из формулы: εк, г = ν·КРС, где ν – коэффициент пропорциональности.

СЗД П передатчик, АФС антенно фидерная система, ПУ А, ПУ Д предварительные усилители канала азимута и дальности, ДМ делитель мощности, СМ А, СМ Д смесители канала азимута и канала дальности, Гет гетеродин, УПЧ У, УПЧ Ш усилители промежуточной частоты узкополосный и широкополосный. БИС А, БИС Д блоки импульсных сигналов канала А и канала Д. БП блок посадочных сигналов, БСС блок суммирования сигналов Принцип работы бортовой аппаратуры заключается в следующем. При входе самолета в зону курсового (глиссадного) маяка самолетный приемник принимает ВЧ сигналы КРМ (ГРМ), преобразует, усиливает и детектирует их, после чего они поступают на вход НЧ усилителя и разделительные фильтры, последние выделяют соответственно сигналы частоты 1300 и 2100 Гц. Далее эти сигналы подаются на балансную схему сравнения. Схема измерения дальности, находящаяся на борту самолета, запускает бортовой передатчик, который излучает кодовую группу «Запрос» , а затем получает от наземного ретранслятора импульсы «ответ» . Временной интервал между запросными и ответными импульсами, принимаемыми приемником, пропорциональны дальности до наземного ретранслятора дальномера. Вместе с сигналами отклонения от равносигнальных зон курса и глиссады в приемнике вырабатываются сигналы «Готовность К» и «Готовность Г»
 примерно равен 3°, но может зависеть от местности. Чем меньше")
Угол наклона глиссады (УНГ) примерно равен 3°, но может зависеть от местности. Чем меньше УНГ, тем удобнее садиться самолёту, так как ниже вертикальная скорость. В России в аэропортах, где местность не мешает низкому заходу, используется УНГ 2° 40′. В горах или если глиссада проходит над городом, УНГ больше. Например, в аэропорту Новосибирск Северный, который находится близко к центру города, глиссада, проходящая над лесом, наклонена под углом 2° 40′ (уклон 4, 8 %), а заход со стороны города производится под углом 3° 40′ (наклон 6, 6 %, в 1, 5 раза больше). В аэропорту города Кызыла, в горной местности, УНГ равен 4° (7 %). Маркерные радиомаяки работают на частоте 75 МГц, излучая сигнал узким пучком вверх. Ближний и дальний маркерные маяки в отечественных аэропортах обычно устанавливаются вместе с приводными радиостанциями. Дальний маркерный радиомаяк устанавливается примерно в 4, 5 километрах от торца ВПП. Высота пролёта Н= 250 метров). Ближний маяк устанавливается в 1000 метров от торца полосы (Н=60 м. Внутренний маяк используется редко, устанавливается для дополнительного сигнала о проходе над торцом ВПП в условиях низкой видимости. Обычно это место, где самолёт достигает точки минимума (примерно 10 20 м).

Курсо-глиссадная система Ку рсо—глисса дная система (КГС, в английской терминологии — Instrument Landing System, ILS) — наиболее распространённая в авиации радионавигационная система захода на посадку по приборам. Принцип работы КГС состоит из двух радиомаяков: курсового (КРМ) и глиссадного (ГРМ). Антенная система КРМ представляет собой многоэлементную антенную решётку, состоящую из линейного ряда направленных антенн метрового диапазона с горизонтальной поляризацией. Для расширения рабочего сектора радиомаяка до углов ± 35° часто используется дополнительная антенная решётка. Диапазон рабочих частот КРМ 108— 112 МГц (используется 40 канальная сетка частот, где каждой частоте КРМ поставлена в соответствие определённая частота ГРМ). КРМ размещают за пределами взлётно посадочной полосы на продолжении её осевой линии. Его антенная система формирует в пространстве одновременно две горизонтальных диаграммы излучения. Первая диаграмма имеет один широкий лепесток, направленный вдоль осевой линии, в котором несущая частота промодулирована по амплитуде сигналом суммы частот 90 и 150 Гц. Бортовое пилотажно навигационное оборудование измеряет величину РГМ, определяя сторону и угол отклонения воздушного судна от посадочного курса. Антенная система ГРМ представляет собой в простейшем случае решётку из двух разнесенных по высоте направленных антенн дециметрового диапазона с горизонтальной поляризацией (решетка «0»). Диапазон рабочих частот ГРМ 329— 335 МГц. ГРМ размещают со стороны, противоположной участку застройки и рулёжным дорожкам, на расстоянии 120— 180 м от оси ВПП напротив зоны приземления. Удаление ГРМ от порога ВПП определяется таким образом, чтобы при заданном угле наклона глиссады опорная точка (точка над торцом ВПП, через которую проходит прямолинейная часть глиссады) находилась на высоте 15± 3 м для радиомаячных систем посадки I и II категории и 15+3− 1 м для систем III категории.

При использовании ILS радиомаяк, расположенный в начале взлетно посадочной полосы, направляет луч навстречу самолету вдоль посадочной глиссады. При этом приборы на борту самолета укажут летчику, где он находится: выше, ниже, слева, справа или точно на глиссаде снижения (см. рисунок).
 Non directional beacon (сокр. NDB) ненаправленный (всенаправленный) радиомаяк или")
Приводные радиостанции (ДПРС и БПРС) Non directional beacon (сокр. NDB) ненаправленный (всенаправленный) радиомаяк или приводная радиостанция (ПРС). ПРС представляют собой наземные радиопередающие станции, излучающие периодические (телеграфный режим) или тонально модулированные незатухающие (телефонный режим) колебания, а также позывные сигналы для опознавания (идентификации) радиостанции. Позывные сигналы передаются кодом Морзе тонально манипулированными колебаниями, причём дальней приводной радиостанции присваивается двухбуквенный позывной, ближней приводной – однобуквенный. диапазон рабочих частот ПРС охватывает участок от 150 к. Гц (2000 м) до 1300 к. Гц (231 м). Дальность действия дальней приводной радиостанции (ДПРС, ОПРС, ДПРМ) при работе на привод по радиокомпасу составляет не менее 150 км, ближней приводной радиостанции (БПРС, БПРМ) – не менее 50 км. Мощность излучения устанавливается такой, чтобы погрешность определения курсовых углов с помощью радиокомпаса на борту летательного аппарата не превышала ± 5º.

Недавно про «Буран» показывали. Академик РАН рассказывал как они систему посадки Бурана разрабатывали с нуля. Сказал он, что до сих пор ничего подобного нет ни у кого. Автоматизированная система посадки разрабатывалась как основная, а пилот в ней был лишь последним звеном резервирования, на случай если все системы выходят из строя. (Челноки кстати до сих пор в ручном режиме сажают). Показали сборку этих компьютеров, алгоритмические таблицы разработчиков софта. Рассказал академик и о знаменитом самостоятельном предпосадочном манёвре Бурана. Говорит, ветерок тогда был сильно боковой, почти поперёк полосы, из за этого даже хотели отложить запуск, но всё таки пустили. Наземные команды дублировали все расчёты, чтобы предсказать поведение Бурана, и все однозначно ждали заход нашего челнока по вполне определённой траектории. Но электронные «мозги» Бурана обладали более полными данными текущей обстановки и в один момент Буран решает, что выбранная траектория захода не является оптимальной в сложившихся условиях. Он принимает решение зайти на полосу с другой стороны, хотя уже начал выполнять манёвр захода. Чтобы увеличить продолжительность пребывания в воздухе он переходит на режим планирования с максимальным качеством, убирает шасси (к тому моменту у него шасси уже были выпущены), меняет механизацию и выполняет отворот для захода с противоположным курсом. На земле народ естественно оказался, мягко выражаясь, в недоумении. Наверняка многие решили, что у аппарата крыша съехала. Но какова же у всех была радость, когда эта умная машина показалась точно на глиссаде с противоположным курсом, и совершила идеальную посадку!. .

Для осуществления посадки самолета на аэродроме размещаются, кроме наземной части системы РСБН, также курсовые глиссадные радиомаяки (рисунок 1. 2). Курсовой радиомаяк (КРМ) предназначен для формирования на ЛА сигналов отклонения от заданного курса посадки. Работает на антенну направленного действия. ДН имеет вид двух пересекающихся лепест ков, модулированных частотами F 1 = 2100 Гц (правый), F 2 = 1300 Гц (левый). Коммутация облучателей производится с частотой F = 13 Гц (рисунок 1. 3). Глиссадный радиомаяк (ГРМ) предназначен для формирования сигналов отклонения от заданной траектории глиссады планирования. Работает на направленную антенну параболического типа. ДН в верти кальной плоскости имеет вид двух пересекающихся лепестков, промодулированных частотами F 1 = 2100 Гц (нижний), F 2 = 1300 Гц (верхний). Коммутация облучателей производится с частотой F = 13 Гц (рисунок 1. 4) ГРМ ВПП КРМ F 2 = 1300 Гц F 1 = 2100 Гц 150 м 400 1000 м ГРМ 250 м 200 м а) рисунок 1. 2 8 F 1 = 2100 Гц Направлен ие посадки ВПП 400 1000 м рисунок 1. 3 8 F 2 = 1300 Гц 250 м б) Рисунок 1. 4 (а – вид сверху, б – вид сбоку)
 Курсовой радиомаяк,")
Радиомаячная система инструментального захода летательных аппаратов на посадку сантиметрового диапазона волн (МСП) Курсовой радиомаяк, слева антенна DME Глиссадный радиомаяк Бортовое радиотехническое оборудование посадки MLS должно обеспечивать при работе с наземными маяками: определение положения ЛА по азимуту, углу места и дальности относительно соответствующих маяков; определение положения самолета относительно заданной траектории с требуемой точностью и до высот, соответствующих посадочному минимуму, установленному для данного типа ЛА; выдачу азимутальной, угломестной и дальномерной информации и информации об отказах для визуальной индикации экипажу и в виде электрических сигналов в другое бортовое оборудование, если эти сигналы используются; прием разовых команд (запрет перестройки, воздух — земля, взлет — посадка), выдаваемых другими бортовыми системами, необходимых для обеспечения выполнения оборудованием MLS требуемых функций; выдачу электрических сигналов об основных и вспомогательных данных, передаваемых маяками MLS и индикацию основных данных. В соответствии с решаемыми задачами, в MLS выделяют независимые, друг от друга, угломерную (УПС) и дальномерную (ДПС) подсистемы.

МИКРОВОЛНОВАЯ СИСТЕМА ПОСАДКИ В зависимости от комплектации MLS может использоваться в условиях погодного минимума I, III категории ICAO. В соответствии с решаемыми задачами в MLS выделяют независимые друг от друга угломерную и дальномерную подсистемы УПС и ДПС. В комплектацию MLS входят: азимутальный радиомаяк захода на посадку АРМ 1; угломестный радиомаяк захода на посадку УРМ 1; дальномерный радиомаяк ответчик ДРМ. В расширенной комплектации к указанному оборудованию добавляются: азимутальный радиомаяк обратного курса АРМ 2; угломестный радиомаяк выравнивания УРМ 2. Дальность действия, км (число МРМ): канал курса или азимута 37 канал глиссады или угла места канал дальности 37 Погрешность определения положения ВС у начала ВПП (2σ): канал курса (азимута), м 6 канал глиссады, градус (угла места, м) 0, 6 канал дальности, м 30 Диапазон частот, МГц: канал курса (азимута), канал глиссады (угла места) 5031… 5090, 7 канал дальности (маркерный) 960… 1215 АРМ 2 обратного азимута, обслуживающим взлетающие и уходящие на второй круг самолеты

Зона действия угломерной подсистемы MLS представляется следующим образом: АРМ 1 в горизонтальной плоскости имеет сектор ± 40º от оси ВПП и дальность действия 37 км и в вертикальной плоскости ограничена сектором примерно 0, 9º 15º относительно горизонта от точки отсчета MLS; Зона сканирования луча ФАР (а), временная диаграмма сканирования (б), структурная схема приемного устройства (в) и принимаемые импульсы в угломестном канале MLS (г): ФАР – фазированная антенная решетка угломестного радиомаяка УРМ 1; Θm – максимальный угол сканирования луча ФАР; Θo – выбранный на борту угол глиссады; Θ – текущий угол положения ВС; ПРМ – приемное устройство; УВС – устройство выделения полезного сигнала; УИВ – устройство измерения времени; ВУ – вычислительное устройство.

Информация об угловом положении ВС формируется с помощью наземного оборудования и выделяется на борту ВС одной и той же аппаратурой при реализации любой из функций УПС. Наземное оборудование УПС имеет антенную систему типа ФАР, формирующую луч с ДН шириной 1 … 4º. Этот луч сканирует в пределах углового сектора, соответствующего сектору пропорционального наведения, с постоянной скоростью. В азимутальном радиомаяке «туда» в сторону увеличения угла и «обратно» в сторону уменьшения угла, Нулевое положение совпадает с осью ВПП. В угломестном маяке луч сканирует «вверх» в направлении увеличения угла и «вниз» в сторону уменьшения угла. Нулевое значение угла места совпадает с горизонтальной плоскостью, проходящей через фазовый центр антенны радиомаяка. Во время движения луча «туда и «обратно» , «вверх» и «вниз» антенна излучает немодулированный сигнал. Переходу от движения луча в прямом направления в обратном направлении к движению в обратном направлении соответствует прекращению излучения (пауза). Рассмотренный цикл периодически повторяется с частотой повторения данной функции. При прохождении луча антенны радиомаяка через точку, где расположена приемная антенна, на выходе последней формируется импульсный сигнал, форма огибающей и длительность которого определяются формой и шириной диаграммы направленности антенны радиомаяка и скоростью движения луча. В бортовом оборудовании (рис. в) сигнал с выхода приемника ПРМ поступает на устройство выделения полезного сигнала УПС. Очищенный от помех сигнал преобразуется в прямоугольный импульс, путем его отсечения по уровню 3 д. Б и подается на устройство измерения времени УИВ, в котором определяется угловое положение ВС путем измерения интервала времени tφ, θ между принимаемыми во время прямого и обратного хода луча ДН радиомаяка импульсами.

Сигнал с выхода УИВ несет информацию об определяемом угловом параметре: φ= Kφ tφ ; θ = Kθ tθ, где Kφ и Kθ – масштабирующие коэффициенты. Полученные значения φ или θ подаются на вычислительное устройство ВУ, где сравниваются со значениями Тоφ или Тоθ соответствующими положению ВС на линии курса или выбранной на борту линии глиссады (То – представляет собой интервал времени между импульсами прямого и обратного хода луча, принимаемыми на ВС в том случае, когда ВС находится на заданной траектории захода на посадку). Полученная на выходе ВУ разность Δφ, θ = 0, 5 К φ, θ (tφ, θ То φ, θ) несет информацию об отклонении ВС от заданной траектории и используется для индикации положения ВС на приборах экипажа и для управления ВС при автоматизации посадки. Дальномерная система, используемая в MLS в отличие от обычной ДМЕ имеет повышенную точность. которая достигается уменьшением: шумов приемника; дискретности отсчета дальности, нестабильности частоты счетных импульсов, фиксации временного положения ответных импульсов и фиксированной временной задержки сигнала; искажений переднего фронта принимаемых импульсов; влияния принимаемых сигналов опознавания ДРМ.

Система WAAS LPV (Wide Area Augmentation System Localizer Performance with Vertical Guidance, или Широкозонная высокоточная система с функцией захода на посадку с вертикальным наведением) представляет собой чрезвычайно точную навигационную систему, созданную для гражданской авиации. Система включает спутники и наземные станции, повышающие точность данных Глобальной системы позиционирования (Global Positioning System GPS). WAAS LPV, представляющая собой часть системы воздушного транспорта нового поколения Федерального управления гражданской авиации, позволяет самолету пользоваться данными системы GPS на протяжении всего полета: осуществлять навигацию во время рейса, взлета и посадки в любом аэропорту, который находится в зоне покрытия системы GPS. Система WAAS LPV охватывает примерно 38 наземных опорных станций/приемников, расположенных на территории США, Канады и Мексики, которые отслеживают спутниковые данные системы GPS. Центральные станции, расположенные на обоих побережьях США, собирают данные опорных станций и формируют корректирующее сообщение системы GPS. Станции передают корректирующие данные на геостационарные спутники, расположенные над экватором. Затем спутники передают корректирующие сигналы на спутниковые приемники системы WAAS. Система WAAS LPV также обеспечивает возможность захода на посадку по курсу с вертикальным наведением, который позволяет пилотам заходить в определенные аэропорты при помощи псевдоглиссады подобно системе посадки по приборам. Посадочные минимумы: высота принятия решения 200 футов и видимость на расстоянии полумили. Преимущества системы WAAS LPV включают повышенную безопасность, расширенные возможности планирования полета, снижение затрат и улучшенный доступ к аэропортам. Система WAAS LPV повышает эффективность авиаперевозок благодаря: 1. Повышенным возможностям ВПП. 2. Сниженным требованиям к расстоянию между самолетами, при посадке. 3. Более прямой траектории полета по маршруту. 4. Новым сервисам для точного захода на посадку. 5. Меньшему количеству и упрощенной эксплуатации бортового оборудования.

Рис. 3 -3. Предлагаемый переход на гражданскую авиационную систему навигации
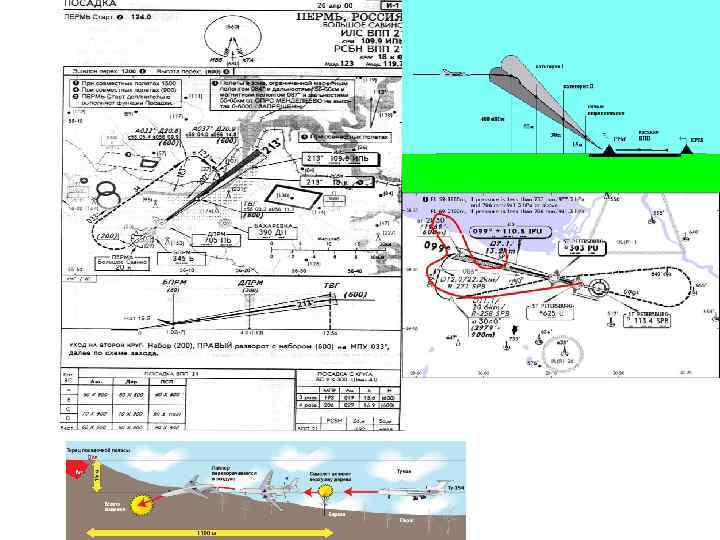
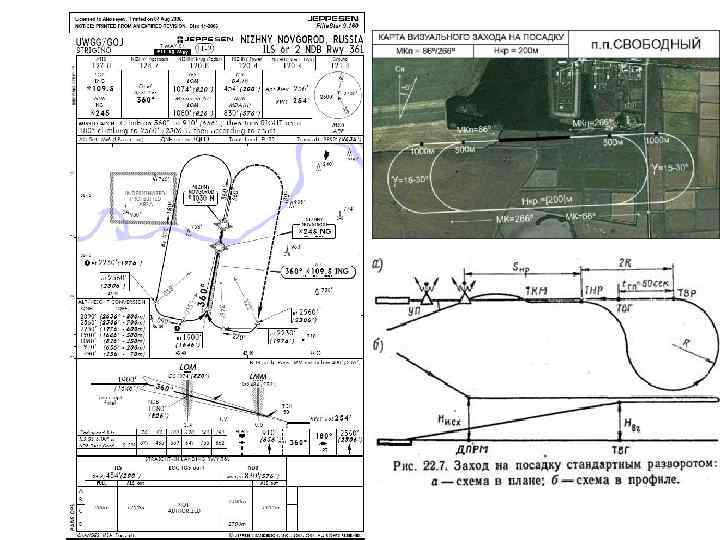

Схемы захода на посадку.

Схема захода на посадку с отворотом на расчетный угол. Схема захода и расчета на посадку по большой коробочке. после устойчивого захвата курсового радиомаяка.
Посадочная радиомаячная группа. Комплект оборудования курсового (КРМ) и глиссадного (ГРМ) радиомаяков и ретранслятора-дальномера. Применялась обычно на аэродромах военного базирования СССР. Бортовые комплекты РСБН обеспечивают приём сигналов ПРМГ, что позволяло использовать её совместно с наземной станцией РСБН в качестве системы обеспечения захода на посадку. С данным режимом захода связан термин «Заход по «Катету». Вероятно «Катет» — название одной из модификаций ПРМГ.
Краткое описание ПРМГ-76 [1]
Модернизированная инструментальная система посадки ПРМГ-76УМ обеспечивает заход на посадку днем и ночью на полевые стационарные аэродромы при метеоминимумах I, II категории ICAO в режимах ручного, полуавтоматического и автоматического управления самолетов, оборудованных аппаратурой РСБН-2С или ее модификациями.
Рекомендуется для использования на стационарных аэродромах в режиме дистанционного управления с КДП.
Может использоваться на полевых и временных аэродромах.
Состав:
- глиссадный радиомаяк (ГРМ)
- курсовой радиомаяк (КРМ)
- ретранслятор дальномера (РД), размещенный совместно с КРМ в аппаратной дальномерно-курсового радиомаяка (ДКРМ)
- аппаратура телеуправления и телесигнализации (ТУ-ТС), устанавливаемая на диспетчерском пункте
См. также
- Заход на посадку
- СП-50
Примечания
- ↑ Посадочная радиомаячная группа дециметрового диапазона ПРМГ-76У(М)
| Это незавершённая статья. Вы можете помочь проекту, исправив и дополнив её. |