Страна: СССР
Год издания: нет данных
Автор:
Издательство: Военно издательство Министерства обороны СССР
Количество страниц: 74
Формат: PDF
Размер: 20 Mb
Инструкция предназначена для войск .ПВО и мотострелковых частей для подготовки зенитчиков-ракетчиков. В инструкции приведены технические характеристики ПЗРК. Таблица по стрельбе в зависимости от высоты и скорости воздушной цели. Содержится полная информация по назначению и взаимодействию каждой части ПЗРК. Прописаны требования по ведения огня, подготовки площадки для ПЗРК, взаимодействие нескольких расчётов ПЗРК. В инструкции содержится техника безопасности по хранению, транспортировки и обращению с ПЗРК.




Описание ПЗРК «Стрела-2»
Описание ПЗРК «Стрела-2М»
ЧАСТЬ ПЕРВАЯ
УСТРОЙСТВО ПЕРЕНОСНОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА“ СТРЕЛА— 2” И ПРАВИЛА ОБРАЩЕНИЯ С НИМ
Глава I
НАЗНАЧЕНИЕ И УСТРОЙСТВО КОМПЛЕКСА
Общие сведения о комплексе
1. Переносный зенитный ракетный комплекс «Стрела-2» является мощным огневым средством непосредственного прикрытия мотострелковых, танковых, парашютнодесантных подразделений от ударов воздушного противника в основном с малых высот. Комплекс позволяет эффективно уничтожать визуально наблюдаемые воздушные цели, излучающие тепловую энергию, как правило, на догонных курсах, а малоскоростные и неподвижные воздушные цели (зависшие вертолеты) — и на встречных курсах.
Комплекс прост в боевом применении и обслуживании, обладает высокой мобильностью и возможностью применения во всех видах боя и боевой деятельности войск.
В бою комплекс обслуживается и переносится одним человеком. Стрелок-зенитчик, вооруженный комплексом, способен быстро маневрировать и вести огонь с любого места, обеспечивающего возможность обнаружения цели и безопасность стрельбы: с открытой местности, из окопа, бронетранспортера, боевой машины пехоты, танка, с железнодорожной платформы и плавающих средств. Комплекс можно сбрасывать на парашюте в парковой укупорке.
2. Вес комплекса в боевом положении 14,5 кг, в походном — 15,8 кг. Вес ракеты 9,15 кг. Калибр ракеты 72 мм. Длина трубы комплекса 1490 мм. Время подготовки комплекса в состыкованном виде к стрельбе не более 10 сек. Комплекс может работать при температуре от +50 до –38 °C.
3. В состав комплекса (рис. 1) входят ракета 9М32 в трубе с источником питания и пусковой механизм 9П53.
4. Действие комплекса основано на принципе пассивного самонаведения зенитной управляемой ракеты по тепловому (инфракрасному) излучению цели. Пуск ракеты производится из трубы с помощью подстыкованного к ней пускового механизма.
Ракета
5. Ракета представляет собой управляемый снаряд с реактивным двигателем, работающим на твердом топливе, аппаратурой управления и боевой частью со взрывательным устройством ударного действия.
Полет ракеты происходит под действием силы тяги двигательной установки, которая возникает вследствие истечения через сопло пороховых газов, образующихся при горении топлива. Средняя скорость полета ракеты 430 м/сек. Активный участок полета ракеты (до полного сгорания топлива) составляет 2650 м; в дальнейшем ракета летит по инерции. Ракета в полете вращается вокруг продольной оси, ее стабилизация относительно двух других осей обеспечивается крыльями, расположенными в хвостовой части.

Рис. 1. Общий вид переносного зенитного ракетного комплекса «Стрела-2»:
1 — труба с ракетой и источником питания; 2 — пусковой механизм

Рис. 2. Конструкция ракеты 9М32:
1 — головной отсек; 2 — рулевой отсек; 3 — боевой отсек; 4 — двигательный отсек; 5 — рули; 6 — крылья
Аппаратура управления осуществляет управление полетом ракеты с помощью рулей по сигналам (командам), поступающим с тепловой следящей головки самонаведения.
6. Ракета (рис. 2) состоит из четырех отсеков: головного, рулевого, боевого и двигательного.
7. В головном (первом) отсеке размещается тепловая следящая головка самонаведения (рис. 3), которая предназначена для захвата цели, слежения за ней и формирования управляющего сигнала для наведения ракеты. Она состоит из следящего координатора цели и автопилота.
Следящий координатор цели является чувствительным элементом аппаратуры управления, воспринимающим тепловое излучение цели. Он предназначен для непрерывного автоматического определения угла рассогласования между осью координатора и линией ракета — цель. Координатор состоит из собственно координатора и гироскопической системы автоматического слежения за целью.
До нажатия на спусковой крючок ось координатора совмещена с продольной осью ракеты. Координатор удерживается в этом положении с помощью электрического стопора (координатор заарретирован). При нажатии на спусковой крючок до первого упора производится выключение электрического стопора и расстопоривание координатора (координатор разарретирован). При этом он получает возможность менять свое положение относительно продольной оси ракеты.
Автопилот предназначен для преобразования управляющего сигнала, поступающего с выхода следящего координатора, и формирования сигнала управления рулями ракеты.
8. Рулевой (второй) отсек предназначен для размещения элементов аппаратуры управления полетом ракеты и бортового источника питания. В нем размещены: рулевая машинка, бортовой источник питания, пороховой аккумулятор давления, датчик угловых скоростей.
Рулевая машинка является исполнительным органом аппаратуры управления ракетой и предназначена для поворота рулей под воздействием управляющих сигналов. Рулевая машинка работает от газов, поступающих их порохового аккумулятора давления.
Бортовой источник питания служит для электропитания аппаратуры ракеты в полете. Он состоит из турбогенератора и стабилизатора выходных напряжений. Ротор турбогенератора вращается под воздействием пороховых газов, поступающих из порохового аккумулятора давления.
Пороховой аккумулятор давления служит для питания турбогенератора и рулевой машинки пороховыми газами, которые образуются при горении пороховой шашки в специальной камере.

Рис. 3. Тепловая следящая головка самонаведения:
1 — общий вид; 2 — следящий координатор цели; 3 — автопилот
Датчик угловых скоростей служит для выработки электрического сигнала, пропорционального величине угловой скорости колебаний ракеты.
9. В боевом (третьем) отсеке размещаются боевая часть и взрывательное устройство (рис. 4).

Рис. 4. Боевая часть и взрывательное устройство:
1 — боевая часть; 2 — взрывательное устройство
Боевая часть осколочно-фугасно-кумулятивного действия предназначена для поражения воздушных целей и состоит из металлического корпуса, разрывного заряда весом 0,37 кг и тетрилового детонатора.
Взрывательное устройство ударного действия, электромеханического типа предназначено для подрыва боевой части при встрече ракеты с целью и для самоликвидации ракеты при промахе. Взрывательное устройство имеет две ступени предохранения, которые обеспечивают безопасность в обращении с ракетой.
Первая ступень предохранения обеспечивается инерционным стопором, который выключается под действием сил инерции при пуске ракеты, вторая ступень — пиротехническим предохранителем, который выгорает на начальном участке полета.
10. В двигательном (четвертом) отсеке размещена двигательная установка, предназначенная для создания силы тяги, которая обеспечивает старт ракеты, ее вращательное движение и необходимую скорость полета на траектории. Двигательная установка состоит из выбрасывающего и однокамерного двухрежимного двигателей (см. рис. 2), работающих на твердом топливе.
Выбрасывающий двигатель предназначен для выброса ракеты из трубы со скоростью 30 м/сек и придания ей скорости вращения 20 об/сек. Он состоит из стакана, выбрасывающего заряда, воспламенителей и соплового блока. Для обеспечения безопасности стреляющего двигатель заканчивает работу до вылета ракеты из трубы.
Однокамерный двухрежимный двигатель предназначен для разгона ракеты до средней скорости 430 м/сек на первом режиме работы двигателя (стартовая ступень) и поддержания этой скорости на втором режиме работы двигателя (маршевая ступень). Он состоит из камеры, гильзы, двухшашечного порохового заряда и воспламенителя.
На заднем торце хвостовой части четвертого отсека шарнирно закреплены четыре крыла под углом 55′ к продольной оси ракеты, что обеспечивает ее вращение в полете. Крылья образуют стабилизатор ракеты. Они участвуют и в создании подъемной силы.
При размещении ракеты в трубе рули и крылья находятся в сложенном положении и удерживаются от раскрытия стенками трубы.
11. Состыкованные отсеки ракеты, крылья и рули составляют планер ракеты, который служит для создания аэродинамических управляющих сил, изменяющих направление полета ракеты в соответствии с командами бортовой аппаратуры управления.

Рис. 5. Силы, действующие на ракету в полете
При полете ракеты с работающим двигателем на нее действуют сила тяги двигателя (реактивная сила) T, подъемная сила Y, сила лобового сопротивления X и сила тяжести G, а также стабилизирующий момент Мст (рис. 5).
Сила тяги приложена к центру тяжести ракеты и направлена вдоль ее продольной оси.
Подъемная сила перпендикулярна вектору скорости V, который направлен по касательной к траектории полета ракеты.
При отклонении рулей по командам бортовой аппаратуры управления появляется угол атаки, в результате чего возникает подъемная сила, изменяющая направление полета ракеты. Углом атаки a называется угол между вектором скорости и продольной осью ракеты.
Сила лобового сопротивления направлена в сторону, противоположную направлению вектора скорости. Она не оказывает влияния на направление полета ракеты.
Подъемная сила и сила лобового сопротивления являются составляющими полной аэродинамической силы, которая возникает в полете в результате взаимодействия планера с воздухом.
Сила тяжести перпендикулярна линии горизонта и приложена к центру тяжести ракеты.
Стабилизирующий момент возникает в результате действия полной аэродинамической силы. Под его воздействием ракета поворачивается в сторону уменьшения угла атаки.
Труба и источник питания
12. Труба (рис. 6) предназначена для прицеливания, пуска ракеты и предохранения стрелка-зенитчика от воздействия пороховых газов при пуске. Одновременно труба служит укупоркой ракеты при ее переносе, транспортировке и хранении. Она состоит из собственно трубы, блока вращения, механического прицела, механизма бортразъема, разъема и фиксатора.

Рис. 6. Труба:
1 — собственно труба; 2 — передняя крышка; 3 — задняя крышка; 4 — блок вращения; 5 — мушка; 6 — целик; 7 — патрон с сигнальной лампочкой; 8 — стойки; 9 — механизм бортразъема; 10 — корпус; 11 — отверстия с прорезями; 12 — разъем с крышкой; 13 — источник питания; 14 — стопор; 15 — фиксатор; 16 — ремень
13. Собственно труба служит для направления полета ракеты и отвода пороховых газов при пуске. Канал трубы гладкий, открытый с обоих концов. Внутри трубы со стороны переднего среза вклеено резиновое кольцо, которое плотно обжимает головку самонаведения, предохраняя внутреннюю полость трубы от попадания влаги при снятой передней крышке. В походном положении передний и задний срезы трубы закрываются крышками.
14. Блок вращения предназначен для разгона ротора гироскопа следящего координатора цели. Он состоит из катушек, магнитное поле которых, взаимодействуя с постоянным магнитом ротора, создает вращающий момент.
15. Механический прицел предназначен для наведения трубы с ракетой на цель. Он состоит из мушки и целика, закрепленных на откидывающихся стойках. Кольцевая мушка закреплена на передней стойке. На задней стойке закреплены целик и патрон с сигнальной лампочкой, загорающейся при захвате цели головкой самонаведения. Сигнальная лампочка снабжена диафрагмой, предохраняющей глаз стрелка от засветки при стрельбе в сумерках.
16. Механизм бортразъема предназначен для соединения электрических цепей трубы и ракеты, а также для механического стопорения ракеты в трубе. Он состоит из корпуса, в котором расположены бортразъем, стопор, толкатель с резиновым колпачком и вставка.
Бортразъем служит для соединения электрических цепей трубы и ракеты. Ножевые контакты вилки бортразъема входят в соответствующие гнезда розетки на ракете.
Стопор служит для фиксации ракеты в трубе. Он входит в гнездо рулевого отсека ракеты, удерживая ракету от перемещений.
Толкатель с резиновым колпачком служит для расстопоривания ракеты при нажатии на спусковой крючок пускового механизма при пуске.
Вставка служит для подсоединения источника питания.
С помощью проушин корпуса и фиксатора, закрепленного на обойме, к трубе присоединяется пусковой механизм.
17. Разъем предназначен для соединения электрических цепей пускового механизма и трубы. Контакты вилки разъема пускового механизма входят в соответствующие гнезда разъема трубы.
18. Источник питания одноразового действия обеспечивает питание постоянным током электронного блока пускового механизма, головки самонаведения (до выхода на режим бортового источника питания ракеты), цепи взведения взрывательного устройства, электровоспламенителей порохового аккумулятора давления и выбрасывающего двигателя. Он представляет собой батарею последовательно соединенных электрохимических элементов. Между электрохимическими элементами располагаются пиротехнические нагреватели, которые загораются при включении источника питания. Под воздействием тепла, выделившегося при сгорании пиротехнических нагревателей, расплавляется твердый электролит. Источник питания выходит на режим за время не более 1,3 сек. Время его работы составляет не менее 40 сек. Источник питания крепится к трубе с помощью чеки и стопора.
Пусковой механизм
19. Пусковой механизм (рис. 7) предназначен для подготовки ракеты к пуску и производства пуска.
Основанием пускового механизма служит корпус, в котором собраны все части и узлы пускового механизма. Корпус имеет проушину, в которой установлены ось, служащая для подсоединения пускового механизма к трубе, спусковой крючок и стопор спускового крючка. Для фиксации пускового механизма после подсоединения его к трубе служит стопор пускового механизма. В верхнем окне корпуса закреплена вилка разъема с контактами, которыми она подсоединяется к разъему трубы. На крышке пускового механизма закреплен телефон, подающий звуковой сигнал о захвате цели головкой самонаведения.
20. В рукоятке пускового механизма размещена контактная группа, которая выполняет следующие функции:
— при ненажатом спусковом крючке исключает возможность подачи напряжения на электровоспламенители выбрасывающего двигателя и порохового аккумулятора давления;

Рис. 7. Пусковой механизм:
1 — корпус; 2 — проушины; 3 — ось; 4 — спусковой крючок; 5 — стопор спускового крючка; 6 — стопор пускового механизма; 7 — рукоятка; 8 — крышка; 9 — телефон; 10 — электронный блок
— при нажатии спускового крючка до первого положения выключает электрический стопор следящего координатора цели тепловой следящей головки самонаведения;
— при полном нажатии спускового крючка подключает электровоспламенители порохового аккумулятора давления и выбрасывающего двигателя к источнику питания.
21. Внутри корпуса пускового механизма размещен электронный блок, который предназначен:
— для преобразования напряжения источника питания и подачи его на электрические цепи трубы и ракеты;
— для разгона ротора гироскопа следящего координатора цели;
— для формирования и выдачи звукового и светового сигналов о захвате цели тепловой следящей головкой самонаведения;
— для отключения источника питания от тепловой следящей головки самонаведения перед стартом ракеты при включении бортового источника питания;
— для последовательной подачи напряжения на электровоспламенители порохового аккумулятора давления и выбрасывающего двигателя.
Электронный блок состоит из блоков разгона, задержки и информации.
Блок разгона предназначен для преобразования напряжения, подаваемого от источника питания, и отключения напряжения питания от блока вращения.
Блок задержки отключает источник питания от ракеты после включения бортового источника питания, а также обеспечивает задержку старта ракеты на время переходных процессов в схеме ракеты, вызванных переходом на питание от бортового источника питания.
Блок информации предназначен для выработки звукового и светового сигналов о наличии цели в поле зрения головки самонаведения и о ее захвате. Эти сигналы воспринимает стреляющий.
Действие комплекса
22. При подготовке к пуску ракеты, стрелок-зенитчик включает источник питания, напряжение с которого поступает на электронный блок пускового механизма, а через него на тепловую следящую головку самонаведения и блок вращения, вследствие чего приводится во вращение (разгоняется) ротор гироскопа следящего координатора цели.
При поимке цели и появлении ее в поле зрения тепловой следящей головки самонаведения поток теплового излучения цели попадает в координатор. Если мощность потока больше минимальной чувствительности координатора, то стреляющий слышит звуковой сигнал, а на стойке прицела загорается сигнальная лампочка. При наличии этих сигналов стрелок-зенитчик нажимает на спусковой крючок до первого упора, производя тем самым расстопоривание (разарретирование) координатора. Ось координатора, получив возможность изменять свое положение относительно продольной оси ракеты, автоматически направляется на цель — тепловая следящая головка самонаведения захватила цель.
Для пуска ракеты стрелок-зенитчик нажимает на спусковой крючок до отказа. При этом стопор выходит из зацепления с ракетой, освобождая ее. Напряжение от источника питания подается на электровоспламенитель порохового аккумулятора давления, пороховые газы от которого поступают в турбогенератор. Бортовой источник питания выходит на рабочий режим, после чего происходит переключение электропитания аппаратуры ракеты на бортовой источник питания. Затем срабатывает выбрасывающий двигатель, который выбрасывает ракету из трубы и сообщает ей вращательное движение вокруг продольной оси. Под действием сил инерции снимается первая ступень предохранения взрывательного устройства.
При выходе ракеты из трубы раскрываются рули и крылья. На взрывательное устройство подается напряжение с бортового источника питания.
В течение 0,3 сек после вылета из трубы ракета летит по инерции с неработающим двигателем. На расстоянии не менее 6,5 м, обеспечивающем безопасность стреляющего, начинает работать двухрежимный двигатель. На расстоянии 140―250 м от стреляющего после сгорания пиротехнического предохранителя снимается вторая ступень предохранения и происходит взведение взрывательного устройства.
В конце работы стартовой ступени двухрежимного двигателя, когда ракета разовьет необходимую скорость, начинается эффективное самонаведение ракеты.
В полете ось следящего координатора остается направленной на цель независимо от положения продольной оси ракеты (тепловая следящая головка самонаведения следит за целью). При этом угол между осью следящего координатора и продольной осью ракеты (угол пеленга) может изменяться в пределах 0―40° (рис. 8).

Рис. 8. Взаимное положение оси следящего координатора цели и продольной оси ракеты
Координатор выдает сигнал, пропорциональный изменению угловой скорости линии ракета — цель, который обеспечивает наведение ракеты на цель. Одновременно датчик угловых скоростей вырабатывает сигналы, пропорциональные угловой скорости колебаний ракеты относительно ее центра тяжести, которые служат для уменьшения колебаний ракеты. Эти электрические сигналы поступают в автопилот, где происходит их преобразование в управляющие сигналы.
Рулевая машинка по сигналам, поступающим с автопилота, поворачивает рули, направляя ракету в точку встречи с целью. При попадании ракеты в цель взрывательное устройство подрывает боевую часть.
В случае промаха через 11―14 сек с момента пуска происходит самоликвидация ракеты путем подрыва боевой части.
Запасные части, инструмент и принадлежность. Маркировка элементов комплекса
23. Комплекс снабжен одиночным комплектом ЗИП 1, в состав которого входят запасные части (источник питания 9Б17), инструмент (ключ 51.010, предназначенный для неполной разборки пускового механизма) и принадлежность (фланель «Арктика» арт. № 506 ГОСТ 7259―54, служащая для протирания обтекателя головки самонаведения, защитные очки, предназначенные для защиты глаз стреляющего при пуске ракеты, и чехол 56.000, используемый при переноске пускового механизма и ЗИП во время похода).
Одиночный комплект ЗИП, за исключением источника питания, поступает в парковой укупорке пускового механизма. Источник питания укладывается в парковую укупорку труб с ракетами.
К каждым 30 пусковым механизмам придается групповой комплект ЗИП 2 для пускового механизма 9П53, а к каждым 100 ракетам — групповой комплект ЗИП 2 для ракеты 9М32.
24. Маркировка наносится черной эмалевой краской на трубу, пусковой механизм, источник питания, парковую укупорку труб с ракетами (в одной укупорке хранятся две трубы с ракетами) и парковую укупорку пускового механизма.
Пример маркировки:
Маркировка парковой укупорки труб с ракетами
На торцовой стенке укупорки
102 103
5 — 67–14 ОФК
9П54
15–67 — 9
127 128
2 шт.
Значение входящих в эту маркировку цифр и букв следующее:
102, 103 — учетные номера ракет;
5 — номер партии сборки;
67 — год сборки;
14 — номер снаряжательного завода;
ОФК — обозначение действия боевой части (осколочно-фугасно-кумулятивная);
9П54 — индекс трубы;
15 — номер партии изготовления трубы;
67 — год изготовления трубы;
9 — номер завода — изготовителя трубы;
127, 128 — учетные номера труб;
2 шт. — количество труб в укупорке.
На боковой стенке укупорки
9М32 ОФК
4 — 66–16
102 103
ОК. СНАР.
5 — 67–14
2 шт. БРУТТО 53 кг
Значение входящих в эту маркировку цифр и букв следующее:
9М32 — индекс ракеты;
ОФК — обозначение действия боевой части;
4 — 66–16 — номер партии изготовления, год изготовления и номер завода — изготовителя ракет;
102, 103 — учетные номера ракет;
ОК. СНАР. — окончательно снаряженный вид;
5 — 67–14 — номер партии сборки, год сборки и номер снаряжательного завода;
2 шт. — количество ракет в укупорке;
БРУТТО 53 кг — вес 53 кг.
Маркировка парковой укупорки пускового механизма
На верхней крышке укупорки
9П53
21–66 — 7
112
Значение входящих в эту маркировку цифр и букв следующее:
9П53 — индекс пускового механизма;
21–66 — 7 — номер партии изготовления, год изготовления и номер завода-изготовителя;
112 — учетный номер пускового механизма.
Маркировка трубы
9П54
15–67 — 9
127
9М32
102
ОФК
Значение входящих в эту маркировку цифр и букв следующее:
9П54 — индекс трубы;
15–67 — 9 — номер партии изготовления, год изготовления и номер завода — изготовителя трубы;
127 — учетный номер трубы;
9М32 — индекс ракеты;
102 — учетный номер ракеты;
ОФК — обозначение действия боевой части.
Маркировка пускового механизма
9П53
21–66 — 7
112
Значение входящих в эту маркировку цифр и букв следующее:
9П53 — индекс пускового механизма;
21–66 — 7 — номер партии изготовления, год изготовления и номер завода-изготовителя;
112 — учетный номер пускового механизма.
Маркировка источника питания
9Б17
0 7 11 16 131
Значение входящих в эту маркировку цифр и букв следующее:
9Б17 — индекс источника питания;
0 — условный знак завода-изготовителя;
7 — последняя цифра года изготовления;
11 — месяц изготовления;
16 — номер партии;
131 — порядковый номер изделия в партии.
Глава II
РЕГЛАМЕНТНЫЕ РАБОТЫ, ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ, ХРАНЕНИЕ, СБЕРЕЖЕНИЕ И ТРАНСПОРТИРОВКА КОМПЛЕКСА
Регламентные работы с ракетой и техническое обслуживание пускового механизма
25. Регламентные работы и техническое обслуживание проводятся в целях проверки технического состояния комплекса и поддержания его в постоянной боевой готовности. Для элементов комплекса устанавливаются следующие виды обслуживания:
для ракеты в трубе — регламентные работы;
для пускового механизма — техническое обслуживание.
Регламентные работы с ракетой в трубе включают: внешний осмотр трубы с ракетой, проверку функционирования ракеты, проверку сопротивления изоляции источника питания и замену силикагеля в парковой укупорке.
Обслуживание пускового механизма подразделяется на текущее обслуживание (ТеО) и техническое обслуживание (ТО).
О проведении регламентных работ и технического обслуживания делаются соответствующие записи в формулярах.
26. Перечень регламентных работ, проводимых при эксплуатации и хранении ракеты в трубе, приведен в табл. 1.
27. Внешний осмотр трубы проводится в следующем порядке.
а) Осмотреть трубу и убедиться, нет ли трещин, вмятин и нарушений лакокрасочного покрытия. Разрешается подкраска мест повреждения лакокрасочного покрытия защитной эмалью ХВ-518 ВТУ 35-XII-546-63.
б) Проверить наличие и целостность резиновых крышек трубы. При ежедневных осмотрах запрещается снимать с трубы переднюю и заднюю крышки.
в) Снять крышку с разъема и осмотреть контакты. Контакты должны быть чистыми и не иметь следов смазки и коррозии. Допускается потемнение серебряного покрытия контактов.
г) Осмотреть резиновый колпачок толкателя стопора, колпачок не должен иметь повреждений.
д) Осмотреть механический прицел. Передняя и задняя стойки должны надежно фиксироваться в боевом и походном положениях.
е) Осмотреть источник питания. Он должен надежно крепиться к корпусу механизма бортразъема чекой. Корпус источника питания не должен иметь повреждений (трещин, вмятин и т. п.), допускаются царапины и небольшие повреждения лакокрасочного покрытия. Паз на крышке ударного механизма должен находиться напротив буквы В. Проверить правильность опломбирования источника питания.
Таблица 1
| Вид регламентных работ | Периодичность проведения | регламентных работ и | количество ракет (в %), на | которых проводятся эти работы |
|---|---|---|---|---|
| при эксплуатации в подразделениях (вне укупорки) | при хранении в | парковой укупорке | после транспортировки в парковой укупорке автотранспортом на расстояние 1000 км и более | |
| в неотапливаемых помещениях | в полевых условиях | |||
| Внешний осмотр трубы с ракетой и источника питания | Ежедневно | Во время проверки функционирования | Во время проверки функционирования | |
| Проверка сопротивления изоляции источника питания с помощью ПКП 9В90 или 9Б810 | Один раз в шесть месяцев 100% | Во время проверки функционирования | Во время проверки функционирования | |
| Проверка функционирования ракеты в трубе с помощью прибора 9Б80 или 9Б810 | Один раз в 6 месяцев 100% | Один раз в год 100% | Один раз в 6 месяцев 100% | 50% |
| Замена силикагеля | ― | Один раз в 6 месяцев 100% | Один раз в 3 месяца 100% |
ж) Проверить целостность ремня и его крепление.
з) Осмотреть фиксатор, он не должен быть погнут и не должен иметь вмятин и забоин.
28. Замену силикагеля производить в следующем порядке:
— вывернуть винты крышки отверткой Б150×0,5, находящейся в ЗИП 2;
— снять крышку и прокладку;
— извлечь мешочек с силикагелем и произвести его замену;
— поставить крышку с прокладкой на место и закрепить крышку винтами.
29. Текущее обслуживание пускового механизма проводится стрелком-зенитчиком в часы, предусмотренные распорядком дня части для ухода за техникой.
Техническое обслуживание проводится силами и средствами подвижного контрольного пункта дивизионного склада боеприпасов.
30. Перечень работ, проводимых при эксплуатации и хранении пускового устройства, приведен в табл. 2.
31. Текущее обслуживание пускового механизма проводить в следующем порядке.
а) Проверить целостность корпуса и мастичной пломбы; убедиться, нет ли трещин, вмятин и нарушений лакокрасочного покрытия. Разрешается подкраска мест повреждения лакокрасочных покрытий защитной эмалью ХВ-518 ВТУ 35-XII-546-63 или эмалью ХВ-124 ГОСТ 10144―62.
Таблица 2
| Вид обслуживания | Периодичность проведения | обслуживания и количество | обслуживаемых пусковых | механизмов (в %) |
|---|---|---|---|---|
| при эксплуатации в подразделениях (вне укупорки) | при хранении в | парковой укупорке | после транспортировки автотранспортом в парковой укупорке на расстояние 1000 км и более | |
| в неотапливаемых помещениях | в полевых условиях | |||
| ТеО | До марша, после марша и после пуска ракеты, но не реже одного раза в месяц, если пусковые механизмы не использовались | ― | ― | ― |
| ТО | Один раз в 6 месяцев 100% | Один раз в год 100% | Один раз в 6 месяцев 100% | 100% |
б) Осмотреть контакты разъема. Они не должны быть погнуты, должны быть чистыми, сухими и не должны иметь следов окислов. Допускается потемнение серебряного покрытия контактов. При наличии загрязнений и окислов необходимо удалить следы окислов, зачистив контакты до блеска суконкой и протерев их этиловым гидролизным спиртом-ректификатом СТУ 57-227-64.
в) Проверить надежность фиксации рычага стопора спускового крючка в положениях С и В. Рычаг должен надежно фиксироваться в указанных положениях.
г) Проверить исправность работы спускового крючка. После нажатия до отказа спусковой крючок должен надежно фиксироваться флажком, а после освобождения — энергично возвращаться в исходное положение.
д) Осмотреть крышку разъема. На ней не должно быть повреждений.
е) Проверить исправность работы стопора крепления пускового механизма к трубе. Стопор должен плавно утапливаться в гнездо и энергично возвращаться в исходное положение.
ж) Проверить надежность стыковки пускового механизма с трубой.
е) Произвести неполную разборку и чистку пускового механизма в следующей последовательности:
— разобрать стопор спускового крючка и произвести его чистку, для чего: нажать на валик стопора спускового крючка ключом 51010 так, чтобы валик продвинулся, а штифт вышел из рычага спускового крючка; вынуть штифт; снять рычаг; вынуть валик и пружину, очистить валик, пружину и отверстие от грязи, пыли или снега;
— собрать стопор спускового крючка в обратном порядке;
— разобрать стопор крепления пускового механизма на трубе и произвести его чистку, для чего: нажать и повернуть ключом 51010 стопор по часовой стрелке до упора; вынуть стопор и пружину; очистить стопор, пружину и гнездо стопора от грязи, пыли или снега;
— собрать стопор крепления пускового механизма в обратном порядке.
Хранение, сбережение и транспортировка комплекса
32. Комплекс может находиться:
— в боевом положении;
— в походном положении;
— в парковой укупорке.
В боевом положении комплекса пусковой механизм подстыкован к трубе, крышки трубы сняты, стойки прицельного приспособления поставлены в вертикальное положение.
Комплекс переводится в боевое положение для выполнения стрелком-зенитчиком боевой задачи по прикрытию подразделения с воздуха.
В походном положении комплекса труба закрыта крышками, стойки прицельного приспособления сложены, пусковой механизм и одиночный комплект ЗИП находятся в чехле на поясном ремне стрелка-зенитчика.
Комплекс в походном положении содержится при отсутствии непосредственной угрозы воздушного нападения.
В парковой укупорке комплекс хранится на складах, пунктах боевого питания, стартовых позициях и доставляется в войска железнодорожным, водным, воздушным или автомобильным транспортом.
Парковая укупорка состоит из двух ящиков, предназначенных для хранения двух труб с ракетами (рис. 9), и пускового механизма с одиночным комплектом ЗИП (рис. 10).
33. Ответственность за хранение комплекса в подразделении несет командир подразделения.

Рис. 9. Трубы с ракетами в парковой упаковке

Рис. 10. Пусковой механизм с одиночным комплектом ЗИП в парковой укупорке
Комплекс должен быть всегда в готовности к боевому применению. Хранение и сбережение комплекса вне парковой укупорки возлагается на стрелка-зенитчика, который обязан бережно обращаться с ним, ежедневно осматривать его, не допускать механических повреждений комплекса и попадания воды, снега, песка на контакты разъемов трубы и пускового механизма.
Комплекс следует хранить в сухом и удобном для доступа месте, вдали от печей и открытого огня.

Рис. 11. Стрелок-зенитчик с комплексом в походном положении (вид спереди)

Рис. 12. Стрелок-зенитчик с комплексом в походном положении (вид сзади)

Рис. 13. Стрелок-зенитчик с комплексом в походном положении в индивидуальных средствах защиты
При движении на занятия или на походе комплекс переносится в положении «за спину» передним срезом трубы вниз. При этом пусковой механизм может быть пристыкован к трубе или находиться в чехле на поясном ремне стрелка-зенитчика (рис. 11―13); рычаг стопора пускового механизма находится в положении С. Ремень должен быть подогнан так, чтобы комплекс не ударялся о твердые предметы снаряжения.
Во время перерывов в занятиях, а также на привалах комплекс находится в положении «за спину» или в руках у стрелка-зенитчика. По указанию командира комплекс может быть положен на землю, подставку или подстилку.
34. При передвижении на автомобилях и открытых бронетранспортерах следует держать комплекс в руках или между колен передним срезом трубы вниз, оберегая его от ударов. Запрещается во время движения класть комплекс без парковой укупорки на пол кузова автомобиля или бронетранспортера, а также прыгать с комплексом из кузова автомобиля. При спешивании с машины стрелку-зенитчику помогает один из стрелков роты (взвода).
При передвижении в закрытых бронетранспортерах, боевых машинах пехоты, в танках, а также при перевозке по железным дорогам, водным путем или воздушным транспортом трубы с ракетами устанавливаются в специальные гнезда (укладки).
35. При длительном хранении комплекса парковые укупорки с элементами комплекса должны находиться в закрытых помещениях, отвечающих требованиям Руководства по хранению и сбережению артиллерийского вооружения и боеприпасов в войсках. Высота штабеля должна быть не более 2 м.
При хранении комплекса на открытых площадках (в полевых условиях) должны выполняться следующие правила:
— площадка должна быть очищена от растительности, посыпана гравием, щебнем или шлаком (толщина слоя покрытия не менее 5 см) и должна иметь водоотливную канаву по всему периметру. На насыпной слой должны быть уложены деревянные бруски толщиной 15―20 см или дощатые настилы;
— ящики парковой укупорки должны быть уложены на бруски (настил) и закрыты навесом или брезентовым покрытием; высота штабеля должна быть не более 2 м;
— необходимо своевременно удалять скопившуюся влагу из складок брезентового покрытия, а в солнечную погоду приподнимать края брезента для вентиляции штабелей; в зимнее время удалять снег с укрытых штабелей и расчищать площадку около них для обеспечения свободного доступа к хранилищу;
— ящики парковой укупорки должны быть закрыты и опломбированы.
Формуляры на ракету и пусковой механизм хранятся в ящиках парковой укупорки.
36. Комплексы могут транспортироваться на бортовых автомобилях с максимально допустимой для данной машины и данного вида дорог скоростью на расстояние до 2000 км. Укладка парковой укупорки выше борта машины более чем на половину высоты ящика запрещается.
Транспортировка железнодорожным, водным и воздушным транспортом производится без ограничений дальности и с любой скоростью. Запрещается одновременно с комплексами перевозить взрывчатые и горючие вещества.
Данные о транспортировке комплексов автомобильным и железнодорожным транспортом заносятся в формуляры.
Перевозка комплексов воздушным транспортом в негерметизированных кабинах допускается на высотах не более 12 000 м и не требует специальной подготовки.
Допускается парашютирование комплексов в парковой укупорке в штатных парашютных мешках УПДММ-65 и на штатных парашютных платформах ПП-127М-3500 и ПГС-500.
37. В случае падения трубы с ракетой в укупорке с высоты более 2 м или без укупорки с высоты более 1 м ракета с трубой подлежит уничтожению с соблюдением действующих правил по уничтожению боеприпасов.
При падении трубы с ракетой в укупорке с высоты менее 2 м или без укупорки с высоты до 1 м необходимо произвести внешний осмотр трубы с ракетой и отправить ракету на проверку.
При падении пускового механизма без укупорки с высоты более 0,5 м или в укупорке с высоты более 2 м извлечь его из укупорки и отправить на проверку.
ЧАСТЬ ВТОРАЯ
ПРИЕМЫ И ПРАВИЛА СТРЕЛЬБЫ ИЗ ПЕРЕНОСНОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА“ СТРЕЛА— 2”
Глава III
ПРИЕМЫ СТРЕЛЬБЫ
Общие положения
38. Переносный зенитный ракетный комплекс «Стрела-2» обслуживается стрелком-зенитчиком, который ведет огонь из комплекса, переносит пусковой механизм и трубу с ракетой. Для переноски второй трубы с ракетой в помощь стрелку-зенитчику может назначаться один из стрелков роты (взвода).
Стрельба из переносного зенитного ракетного комплекса «Стрела-2» может вестись с машины (танка) или со стартовой позиции на местности.
39. Из открытого кузова автомобиля (бронетранспортера) стрельба ведется с остановки, а из люков бронетранспортера (боевой машины пехоты, танка) — также и в движении по ровной дороге со скоростью не более 20 км/ч.
Для стрельбы с машины (танка) стрелок-зенитчик занимает удобное положение, как правило, стоя; остальной личный состав располагается так, чтобы не мешать ему. Во избежание поражения личного состава (экипажа) газовой струей при стрельбе задняя часть трубы выносится за борт машины, свободные люки, стекла и двери кабин, жалюзи моторного отделения (у БТР-60П) закрываются.
40. Стартовая позиция на местности указывается командиром роты (взвода) или выбирается стрелком-зенитчиком самостоятельно.
Стартовые позиции подразделяются на основные, запасные и временные. Основная позиция предназначается для выполнения основных огневых задач и оборудуется при длительном расположении на месте (в обороне, в районе сосредоточения и т. п.), запасная — для маневра при преднамеренном или вынужденном оставлении основной позиции, для чего она выбирается и оборудуется заблаговременно; временная позиция выбирается и занимается с ходу в маневренных видах боевых действий. На стартовой позиции для стрелка-зенитчика отрывается окоп (рис. 14).
В зависимости от обстановки стартовая позиция выбирается в траншее, окопе, воронке от снаряда, канаве или на открытой местности. В населенном пункте стартовая позиция может выбираться на площадях, широких улицах, крышах зданий.
Стартовая позиция должна обеспечивать круговой обзор с углами укрытия не более 0-10, безопасность стрельбы из комплекса для окружающих, укрытие стрелка-зенитчика от огня и наблюдения противника, а также свободу действий при выполнении приемов стрельбы.

Рис. 14. Окоп для стрелка-зенитчика
В направлении стрельбы не должно быть местных предметов, за которые может задеть ракета при полете.
При расположении на одной стартовой позиции нескольких стрелков-зенитчиков расстояние между ними может быть 20―40 м.
41. Для занятия стартовой позиции подается команда: «ТАКОМУ-ТО СТАРТОВАЯ ПОЗИЦИЯ ТАМ-ТО. К БОЮ». По этой команде стрелок-зенитчик, применяясь к местности, быстро выдвигается на стартовую позицию, переводит комплекс из походного положения в боевое, изготавливается к стрельбе согласно ст. 45―50 и докладывает: «ТАКОЙ-ТО ГОТОВ».
Для смены стартовой позиции подается команда «ТАКОМУ-ТО ПЕРЕБЕЖАТЬ (ПЕРЕПОЛЗТИ) ТУДА-ТО. ВПЕРЕД». По этой команде стрелок-зенитчик намечает путь выдвижения на новую стартовую позицию и способ передвижения (шагом, бегом, переползанием), если в команде он не был указан, и занимает новую стартовую позицию.
42. В зависимости от характера местности и наличия укрытий стрелок-зенитчик в бою передвигается ускоренным шагом, бегом, перебежками или переползанием.
При движении ускоренным шагом, бегом и при перебежках комплекс переносится в положении «на руку»: ремень на правом плече, комплекс направлен передним срезом трубы вперед, удерживается снизу и прижимается к правому боку правой рукой.
При переползании комплекс (труба) со сложенными целиком и мушкой и закрытыми передней и задней крышками удерживается правой рукой за ремень у переднего среза.
При нахождении на стартовой позиции (в машине, танке) в готовности
к стрельбе один стрелок-зенитчик держит комплекс в положении «на плечо» на правом плече, упираясь в плечо упором пускового механизма, и удерживает его левой рукой за корпус, а правой — за рукоятку пускового механизма.
43. При стрельбе из комплекса необходимо соблюдать следующие меры безопасности:
— следить за тем, чтобы в створе с комплексом сзади него не находились люди, боеприпасы, взрывчатые вещества, горючее ближе 6 м; если возможен разлет твердых частиц грунта под действием газовой струи, удаление людей должно быть не менее 40 м;
— не допускать при производстве пуска, чтобы расстояние между задним срезом трубы и находящейся сзади стрелка-зенитчика преградой было меньше 50 см;
— производить пуск ракеты при стрельбе из положения стоя при углах возвышения 20―60°, а из положения с колена — 20―40°.
Во всех случаях запрещается:
— производить пуск ракеты из трубы, если не сняты задняя и передняя крышки;
— наклонять трубу передним концом вниз при нажатом до отказа спусковом крючке;
— наводить тепловую следящую головку самонаведения на Солнце (во избежание выхода комплекса из строя);
— производить пуск без надетых защитных очков;
— допускать к стрельбе лиц, не изучивших устройство комплекса и не имеющих твердых навыков в выполнении приемов стрельбы.
Перевод комплекса из походного положения в боевое и изготовка к стрельбе
44. Для перевода комплекса из походного положения в боевое необходимо:
— вынуть защитные очки из чехла пускового механизма и надеть их;
— снять с разъема трубы крышку и уложить ее в чехол пускового механизма;
— вынуть из чехла пусковой механизм, снять с вилки разъема пускового механизма крышку и уложить ее в чехол пускового механизма;
— взять в левую руку трубу с ракетой, а в правую — пусковой механизм; вставить ось пускового механизма в отверстия с прорезями в стенках проушин корпуса механизма бортразъема трубы, при этом рычаг стопора спускового крючка должен находиться в положении С; запрещается производить присоединение пускового механизма к трубе, если рычаг стопора спускового крючка находится в положении В;
— повернуть пусковой механизм так, чтобы фиксатор трубы вошел в зацепление со стопором пускового механизма, при этом должен быть слышен характерный щелчок; приложить усилие в противоположном направлении и убедиться в надежном присоединении пускового механизма к трубе;
— снять переднюю и заднюю крышки трубы и уложить их в чехол пускового механизма. Переднюю крышку снимать за ручку, расположенную на торце крышки, предварительно раскрыв замковый зажим, заднюю крышку — за ушко.
При действиях из люков боевой машины пехоты (бронетранспортера, танка) во избежание повреждения тепловой следящей головки самонаведения передняя крышка снимается после принятия решения на стрельбу и включения источника питания;
— поставить стойки механического прицела в вертикальное положение; в светлое время суток открыть диафрагму лампочки световой сигнализации.
45. Стрелок-зенитчик изготавливается к стрельбе по команде командира роты (взвода) или самостоятельно при получении оповещения о воздушной цели (ее обнаружении).
Изготовка к стрельбе заключается в принятии наиболее удобного при данных условиях положения для стрельбы. Стрельба ведется из положений стоя и с колена.
46. При принятии положения для стрельбы стоя (рис. 15) надо повернуться вполоборота направо по отношению к направлению стрельбы и, не приставляя левой ноги, отставить ее влево, примерно на ширину плеч, распределив при этом тяжесть тела равномерно на обе ноги. Одновременно взять комплекс в положение «на плечо».
47. При принятии положения для стрельбы с колена (рис. 16) отставить правую ногу назад, опуститься на правое колено и присесть на каблук; голень левой ноги при этом должна оставаться в вертикальном положении, а бедра должны составлять угол, близкий к 90°; одновременно с опусканием на правое колено положить комплекс на левое колено передним срезом пусковой трубы вперед и, придерживая трубу левой рукой, взять комплекс в положение «на плечо».
48. Для изготовки к стрельбе с лыж стоя развернуть правую лыжу носком вправо и принять такое же положение, как и для стрельбы стоя без лыж. Для изготовки к стрельбе с лыж с колена надо поставить палки с левой стороны, развернуть правую лыжу носком вправо, опуститься правым коленом на правую лыжу и принять такое же положение, как и при стрельбе с колена без лыж.

Рис. 15. Положение стрелка-зенитчика при стрельбе стоя

Рис. 16. Положение стрелка-зенитчика при стрельбе с колена
Положения для стрельбы в индивидуальных средствах защиты те же, что и при стрельбе в обычных условиях.
49. При стрельбе из окопа стрелок-зенитчик изготавливается к стрельбе, как правило, стоя, прижимаясь корпусом тела к крутости окопа (рис. 17). Осуществляя наводку, стрелок-зенитчик перемещается вдоль стенки окопа так, чтобы задний срез трубы был направлен к центру окопа; слежение за целью он производит доворотом корпуса.

Рис. 17. Стрельба из окопа
50. При действиях на машине стрелок-зенитчик изготавливается для стрельбы стоя: в машине с открытым кузовом — у правого или левого борта; в бронетранспортере БТР-60ПБ — в левом верхнем десантном люке (рис. 18); в боевой машине пехоты — в левом или правом верхнем десантном люке (рис. 19). В боевой машине пехоты и в бронетранспортере БТР-60ПБ один из стрелков, находящийся рядом со стрелком-зенитчиком, вынимает комплекс из укладки и подает его через люк стрелку-зенитчику задним срезом трубы вперед. Для устойчивости стрелок-зенитчик опирается спиной о борт машины или край люка.
Для стрельбы из танка стреляющий (командир танка, наводчик, заряжающий) открывает люк, становится на ограждение пушки и погон башни или кронштейн сиденья, вынимает комплекс из укладки и изготавливается к стрельбе, опираясь для устойчивости спиной о край люка (рис. 20).
Производство пуска
51. Стрелок-зенитчик в зависимости от поставленной задачи и обстановки ведет огонь по воздушным целям по командам командира роты (взвода) или самостоятельно.
В команде на открытие огня указывается, кому и по какой цели стрелять и местоположение цели, например, при стрельбе с места: «ТАКОМУ-ТО, ПО САМОЛЕТУ НАД ТАКИМ-ТО (номер ориентира по странам света). ОГОНЬ»; при стрельбе в движении: «ТАКОМУ-ТО, ПО САМОЛЕТУ СЛЕВА (справа, спереди, сзади). ОГОНЬ».

Рис. 18. Стрельба из люка бронетранспортера

Рис. 19. Стрельба из люка боевой машины пехоты

Рис. 20. Стрельба из люка танка
52. Для производства пуска необходимо:
— включить источник питания, повернув его крышку по часовой стрелке из положения В в положение Х;
— снять переднюю крышку, если она надета;
— левой рукой перевести рычаг стопора спускового крючка из положения С в положение В;
— произвести прицеливание, для чего закрыть левый глаз, а правым смотреть через отверстие целика на мушку — отверстие (полукольцо) мушки должно находиться посередине отверстия целика; другими словами, взять ровную мушку, совместить ее с точкой прицеливания и удерживать в таком положении при сопровождении цели;
— при появлении звука ровного тона и загорания сигнальной лампочки без мигания (или при наличии одного из этих сигналов) и выполнении требований ст. 75 нажать на спусковой крючок до первого упора (произвести разарретирование следящего координатора цели);
— плавно вынести точку прицеливания вперед по курсу цели;
— при стрельбе по низколетящим целям придать пусковой трубе угол возвышения, указанный в ст. 76;
— продолжать сопровождение цели;
— убедившись в устойчивости сигналов о захвате цели тепловой следящей головкой самонаведения и соблюдая требования ст. 77, произвести пуск ракеты, нажав на спусковой крючок до отказа. Не прекращать сопровождение цели до вылета ракеты из трубы.
53. Если после нажатия на спусковой крючок до первого упора исчезнет звуковой сигнал и погаснет сигнальная лампочка, отпустить спусковой крючок в исходное положение. Затем в пределах оставшегося времени работы источника питания и до выхода цели из зоны пуска вновь произвести прицеливание, захват цели и пуск ракеты.
54. Если после нажатия на спусковой крючок до отказа пуск ракеты не произошел, трубу с плеча не снимать. Доложить командиру: «НЕСХОД». Придать трубе угол возвышения не менее 20° и держать ее в таком положении в течение 2 мин. Затем положить комплекс на землю или на подставки передним срезом трубы в безопасном направлении, отстыковать пусковой механизм и находиться сбоку от трубы на расстоянии не менее 10 м. Через 15 мин закрыть трубу с ракетой и разъем крышками. Отправить трубу с ракетой на проверку.
Прекращение стрельбы
55. Прекращение стрельбы производится по команде командира или по самостоятельному решению стрелка-зенитчика в зависимости от обстановки. Оно может быть временным или полным.
Для временного прекращения стрельбы подается команда «Стой». По этой команде стрелок-зенитчик отпускает спусковой крючок и ждет новую команду. Получив команду на открытие огня по новой цели при включенном источнике питания, он быстро производит прицеливание по ней и пуск ракеты. Если новая команда не поступила, стрелок-зенитчик, убедившись в окончании работы источника питания, заменяет его и снова изготавливается к стрельбе.
Для полного прекращения стрельбы после команды «Стой» подается команда «Отбой». По этой команде стрелок-зенитчик переводит комплекс в походное положение и далее действует в соответствии с обстановкой.
56. Для замены источника питания необходимо:
— перевести рычаг стопора спускового крючка из положения В в положение С;
— сложить стойки прицельного приспособления;
— снять комплекс с плеча и поставить его задним срезом трубы на подкладку (подстилку);
— пальцем левой руки откинуть стопор;
— одной рукой сжать ушки чеки, другой — снять источник питания, удерживая его за крышку;
— вынуть из чехла пускового механизма запасной источник питания, снять с него транспортировочную крышку;
— вставить новый источник питания во вставку и застопорить его.
Запрещается разбирать использованный источник питания.
57. Для перевода комплекса из боевого положения в походное необходимо:
— перевести рычаг стопора спускового крючка из положения В в положение С;
— сложить стойки прицельного приспособления;
— снять комплекс с плеча и протереть обтекатель головки самонаведения фланелью;
— надеть переднюю и заднюю крышки на трубу; на заднюю крышку надеть резиновое кольцо;
— взять комплекс в левую руку, большим пальцем правой руки нажать на стопор пускового механизма и повернуть пусковой механизм вокруг оси до выведения фиксатора из зацепления со стопором пускового механизма;
— вывести ось пускового механизма из отверстий с прорезями в стенках проушин корпуса механизма бортразъема трубы;
— положить трубу с ракетой на землю;
— закрыть крышкой вилку разъема пускового механизма и уложить пусковой механизм в чехол;
— закрыть крышкой разъем трубы;
— снять защитные очки и уложить их в чехол пускового механизма.
Запрещается переводить комплекс из боевого положения в походное при работающем источнике питания.
Глава IV
ПРАВИЛА СТРЕЛЬБЫ
Общие положения
58. Задачей стрельбы из переносного зенитного ракетного комплекса «Стрела-2» является уничтожение при благоприятной фоновой обстановке реактивных и винтомоторных самолетов, вертолетов и других воздушных целей, излучающих тепловую энергию и летящих на высотах 50―1500 м со скоростью до 220 м/сек (800 км/ч) на догонных курсах, а малоскоростных винтомоторных самолетов и вертолетов (летящих со скоростью до 100 м/сек), и неподвижных целей (зависших вертолетов) — и на встречных курсах.
По целям, не излучающим тепловую энергию (планерам, аэростатам и другим целям) стрельба не ведется.
59. Выполнение задач стрельбы обеспечивается:
— содержанием комплекса в постоянной готовности к боевому применению;
— своевременным обнаружением и надежным опознаванием цели;
— точным определением входных данных для стрельбы (скорости, высоты, курсового параметра, дальности и типа цели);
— правильным выбором способа стрельбы и вида огня;
— твердым знанием и пространственным представлением границ зон пуска и поражения для различных типов целей;
— правильной оценкой и учетом особенностей воздушной и фронтовой обстановки;
— правильным определением момента пуска;
— быстрыми, четкими, сноровистыми действиями стрелка-зенитчика при стрельбе;
— наблюдением за результатами стрельбы и правильным учетом опыта предшествующих стрельб.
60. Стрельба ведется по воздушным целям, излучающим тепловую энергию и находящимся на фоне ясного неба, сплошной и легкой перистой облачности или кучевой облачности до трех баллов[1], при углах между направлениями на цель и на Солнце более 35°. При меньших углах захват и отслеживание цели тепловой следящей головкой самонаведения невозможны. Пуск ракеты производится при захвате и отслеживании цели тепловой следящей головкой самонаведения и нахождении цели в пределах зоны пуска, а при пусках по неподвижным воздушным целям — при нахождении их в зоне поражения.
61. Величина тепловой энергии, излучаемой целью, зависит от интенсивности излучения тепла нагретыми частями и газовой струей двигателя самолета (вертолета), т. е. собственного излучения цели, и от величины тепловой энергии Солнца, отраженной целью (подсветка цели).
Собственное излучение цели зависит от типа, скорости полета и курсового угла цели.
Подсветка цели зависит от ее освещенности Солнцем; она увеличивает дальность захвата цели тепловой следящей головкой самонаведения.
62. Фоном называется участок небосвода, на котором наблюдается воздушная цель.
При однородном фоне тепловое излучение отдельных его участков примерно одинаково, что создает благоприятные условия для работы тепловой следящей головки самонаведения ракеты. Однородный фон — это ясное небо, сплошная или легкая перистая облачность.
При неоднородном фоне величина отраженной тепловой энергии от его отдельных участков различна и может превышать собственное излучение цели (фоновая помеха), поэтому возможны захват фоновой помехи тепловой следящей головкой самонаведения и потеря цели. Блок информации при захвате фоновой помехи выдает ложный звуковой (световой) сигнал. Неоднородный фон создают различные облака, особенно кучевые. При облачности до 3 баллов вдоль курса цели, как правило, имеются участки, на которых фон однороден, что позволяет производить обстрел цели.
Виды фоновой обстановки и особенности обстрела цели при различных фоновых ситуациях приведены в приложении 1.
63. Стрелок-зенитчик должен уметь различать сигналы от цели и сигналы от фоновых помех. При захвате цели звуковой сигнал непрерывный, ровного тона; световой — постоянной интенсивности. При захвате фоновой помехи звуковой сигнал прерывистый, переменного тона; световой — мерцающий, переменной интенсивности.
64. Зоной пуска называется пространство, при нахождении цели в котором в момент пуска обеспечивается встреча ракеты с целью в зоне поражения.
Зона поражения — это часть пространства, в пределах которого обеспечивается поражение цели с заданной вероятностью.
Характеристики зон пуска при отсутствии солнечной подсветки цели приведены в табл. 3.
Данные табл. 3 стрелок-зенитчик должен знать на память.
65. Стрельба по воздушным целям может вестись следующими способами:
— на догонном курсе;
— на встречном курсе.
Стрельба на догонном курсе является основным способом стрельбы и ведется после пролета целью параметра. Она обеспечивает наибольшую вероятность поражения цели.
Стрельба на встречном курсе, как правило, ведется по неподвижным воздушным целям, находящимся в зоне поражения, и по малоскоростным винтомоторным самолетам и вертолетам, находящимся в зоне пуска, при надежном захвате цели тепловой следящей головкой самонаведения.
Таблица 3
| Тип цели | Характеристики | зон | пуска | |||||
|---|---|---|---|---|---|---|---|---|
| Высота, | м | Максимальный курсовой | параметр*, м | При стрельбе на | догонном курсе | При стрельбе на | встречном курсе | |
| Минимальная | Максимальная | При минимальной высоте | При максимальной высоте | Максимальное работное время до выхода цели из зоны пуска**, сек | Минимальная наклонная дальность на параметре, м | Дальняя граница, м | Ближняя граница, м | |
| Реактивный истребитель (u = 200 м/сек) | 50 | 600―1000 | 750 | 450 | 7 | 750 | ― | ― |
| Реактивный бомбардировщик (u = 200 м/сек) | 50 | 1000 | 1300 | 800 | 7 | 1300 | ― | ― |
| Винтомоторный самолет (u = 100 м/сек) | 50 | 1500 | 2200 | 1600 | 15 | 2200 | Определяется дальностью захвата цели тепловой следящей головкой самонаведения | 800 |
| Вертолет (u = 50 м/сек) | 50 | 1300 | 1500 | 800 | 16 | 1500 | То же | 800 |
* Курсовым параметром называется горизонтальная дальность точки на курсе цели, в которой линия стрелок — цель перпендикулярна направлению полета цели.
** Работным временем называется время в секундах от момента пролета целью параметра до пуска ракеты.
66. В зависимости от взаимного расположения стрелков-зенитчиков на стартовых позициях (машинах, судах, железнодорожных платформах), возможностей управления ими, характера цели, наличия ракет и возможностей их доставки применяются следующие виды огня:
— залповый огонь;
— огонь одиночными ракетами.
Залповый огонь — это такой вид огня, при котором цель обстреливается несколькими стрелками-зенитчиками одновременно по общей команде. Залповый огонь наиболее эффективен; он ведется, как правило, по наиболее важным целям при надежном управлении стрелками-зенитчиками.
Огонь одиночными ракетами — это такой вид огня, при котором пуск каждой последующей ракеты по одной и той же цели производится после оценки результатов стрельбы предыдущей ракетой. Огонь одиночными ракетами ведется по малоскоростным и неподвижным целям, а также при самостоятельной стрельбе стрелков-зенитчиков.
Подготовка стрельбы
67. Подготовка стрельбы начинается с момента обнаружения цели, получения целеуказания или объявления готовности номер один (оповещения о воздушном противнике).
Она включает:
— выбор и занятие стартовой позиции (при действиях в пешем порядке);
— поиск, обнаружение и опознавание воздушной цели;
— оценку воздушной и фоновой обстановки;
— выбор цели для обстрела и изготовку к стрельбе;
— определение входных данных для стрельбы и выбор способа стрельбы;
— принятие решения на пуск и включение источника питания;
— захват цели тепловой следящей головкой самонаведения и прицеливание;
— определение момента пуска и пуск ракеты.
В ходе всей подготовки стрельбы стрелок-зенитчик уточняет принадлежность цели.
Четкие и сноровистые действия стрелка-зенитчика при подготовке стрельбы решающим образом определяют успех стрельбы.
Принципиальная схема проведения подготовки стрельбы на догонных курсах показана на рис. 21.
68. Выбор и занятие стартовой позиции, если она не была занята, производятся в соответствии со ст. 40 и 41.
При движении пешим порядком в цепи роты (взвода) стрелок-зенитчик изучает впереди лежащую местность и намечает места временных стартовых позиций. С получением целеуказания (оповещения), а также после обнаружения цели стрелок-зенитчик быстро занимает временную стартовую позицию, указанную командиром или выбранную самостоятельно.

Рис. 21. Принципиальная схема проведения подготовки стрельбы на догонных курсах
69. Поиск и обнаружение воздушной цели производятся визуально в направлении, указанном при целеуказании (оповещении), или в ответственном секторе наблюдения.
Опознавание воздушной цели производится визуально по силуэтам (очертаниям) самолетов (приложение 2) и их опознавательным знакам с учетом установленного порядка полетов своей авиации и действующих сигналов «Я свой самолет».
70. Воздушную и фоновую обстановку стрелок-зенитчик оценивает визуально при этом он определяет: цели, которые могут войти в зону поражения комплекса, их типы и характер действия; наличие в воздухе своей авиации, воздействие других средств противовоздушной обороны по целям, а также наличие фоновых и тепловых помех.
Оценку фоновой обстановки и определение наличия тепловых помех стрелок-зенитчик должен производить постоянно. При этом он определяет, на каких участках небосвода фон однороден, где фоновая обстановка сложная, участки небосвода, на которых стрельба по условиям фоновой обстановки невозможна, а также запретные секторы стрельбы на Солнце и возможные источники тепловых помех на земле и в воздухе.
71. Цель для обстрела, если она не была указана командиром, стрелок-зенитчик выбирает самостоятельно по результатам оценки воздушной и фоновой обстановки с учетом боевых возможностей комплекса.
Во всех случаях для обстрела выбирается наиболее важная цель (атакующая прикрываемое подразделение или непосредственно угрожающая ему).
При наличии в воздухе нескольких одинаково опасных для прикрываемого подразделения целей выбирается для обстрела та из них, по которой не воздействуют другие средства противовоздушной обороны. При этом во всех случаях предпочтение отдается той из равнозначных целей, условия стрельбы по которой (по высоте, скорости, курсовому параметру, фоновой обстановке) обеспечивают наибольшую эффективность поражения.
72. Изготовка к стрельбе производится в соответствии со ст. 45―50 после выбора цели для обстрела. Положение для стрельбы (стоя, с колена) стрелок-зенитчик выбирает самостоятельно, исходя из конкретных условий обстановки, места стартовой позиции, огневого воздействия противника, добиваясь наилучшего использования возможностей комплекса и надежного выполнения боевой задачи.
73. Входные данные для стрельбы (тип, скорость, высота полета, дальность и курсовой параметр цели) необходимы стрелку-зенитчику для определения возможности обстрела цели, выбора способа стрельбы и определения зоны пуска.
Воздушные цели, обстреливаемые комплексом, по типу подразделяются на реактивные истребители, реактивные бомбардировщики, винтомоторные самолеты и вертолеты.
Тип цели определяется визуально по силуэтам (очертаниям) самолета (вертолета).
Скорость цели определяется на глаз по типу цели с учетом опыта предшествовавших действий авиации противника и разведывательных данных.

Рис. 22. Зона пуска при стрельбе на догонных курсах по реактивному бомбардировщику типа Ил-28

Рис. 23. Зона пуска при стрельбе на догонных курсах по реактивному истребителю типа МиГ-17 и МиГ-19

Рис. 24. Зоны пуска при стрельбе на встречных и догонных курсах по поршневому самолету типа Ли-2

Рис. 25. Зоны пуска при стрельбе на встречных и догонных курсах по вертолету типа Ми-4
Высота и курсовой параметр цели определяются глазомерно.
Дальность до цели определяется на глаз способами, изложенными в приложении 3.
По типу, скорости, высоте полета, курсовому параметру цели и дальности до нее устанавливается возможность обстрела цели.
По типу и скорости цели стрелок-зенитчик выбирает способ стрельбы: реактивные и винтомоторные самолеты, летящие со скоростью 100―220 м/сек, обстреливаются только на догонных курсах; винтомоторные самолеты и вертолеты, летящие ос скоростью менее 100 м/сек, могут обстреливаться на догонных, а в отдельных случаях и на встречных курсах; по воздушным целям, летящим со скоростью более 220 м/сек, стрельба не ведется.
Границы зоны пуска в каждом конкретном случае определяются типом цели и зависят от ее скорости, высоты полета и курсового параметра. Границы зон пуска, показанные на рис. 22―25, стрелок зенитчик должен твердо знать и пространственно представлять.
74. Выбрав способ стрельбы и уточнив принадлежность цели, стрелок-зенитчик принимает решение на пуск ракеты и включает источник питания. При стрельбе на встречных курсах и стрельбе по неподвижной цели источник питания включается на дальности до цели 3500―4000 м, а при стрельбе на догонных курсах — за 1500―2000 м до подлета цели к параметру.
Во всех случаях следует учитывать, что комплекс будет готов к ведению огня через 5 сек после включения источника питания.
75. Захват цели тепловой следящей головкой самонаведения производится при стрельбе на догонных курсах немедленно после прохождения целью параметра, а при стрельбе на встречных курсах — на дальности до цели 3000―3500 м. Убедившись в надежности захвата цели, но не ранее чем через 3 сек после пролета целью параметра при стрельбе на догонных курсах, стрелок-зенитчик нажимает на спусковой крючок до первого упора, разарретируя следящий координатор цели. Если после разарретирования тепловая следящая головка самонаведения продолжает следить за целью (звуковой и световой сигналы не исчезли) и цель находится в зоне пуска, стрелок-зенитчик плавно вводит упреждение, поворачивая трубу примерно на 10° вперед по курсу цели.
76. Если при стрельбе по низколетящей цели угол возвышения трубы меньше 20°, то его следует увеличить до 20°, с тем чтобы линия горизонта была видна на уровне указателя стопора источника питания.
Если к моменту пуска угол места цели превышает 60° при стрельбе стоя или 40° при стрельбе с колена, то перед пуском необходимо уменьшить угол возвышения трубы соответственно до 60 и 40°.
77. Момент пуска определяется характером цели, фоновой обстановкой, размерами зоны пуска и выбирается, как правило, с таким расчетом, чтобы встреча ракеты с целью произошла на ближней границе зоны поражения при стрельбе на догонных курсах и на дальней границе зоны поражения при стрельбе на встречных курсах. Во всех случаях пуск ракеты должен быть произведен при стрельбе на догонных курсах не позже чем через 7―16 сек после пролета целью параметра (в зависимости от типа цели, как указано в табл. 3), а при стрельбе на встречных курсах — на дальности до цели не менее 800 м.
Стрельба по воздушным целям
78. Стрельба по воздушным целям как правило, ведется по команде командира роты (взвода) с таким расчетом, чтобы обеспечить максимальную эффективность огня. Если по условиям обстановки (из-за состояния фона, наличия помех, недостаточного времени пребывания цели в зоне пуска и других причин) обстрел цели, указанной командиром, невозможен, стрелок-зенитчик докладывает командиру о причинах, ограничивающих стрельбу, например: «ТАКОЙ-ТО, ЦЕЛЬ ВНЕ ЗОНЫ (цель в помехах)», и выбирает для обстрела другую цель.
В ходе стрельбы стрелок-зенитчик может при необходимости изменять способ стрельбы и вид огня.
При захвате фоновой помехи или потере цели стрелок-зенитчик до окончания работы источника питания производит повторный захват цели и пуск ракеты.
При промахе ракеты или непоражении цели стрелок-зенитчик быстро подстыковывает к пусковому механизму новую трубу с ракетой и, если цель не вышла из зоны пуска, повторно обстреливает ее.
79. Стрельба из комплекса с двигающейся бронетанковой техники по решению командира роты (взвода) может вестись в движении (на плаву), с короткой остановки или с места.
В движении стрельба ведется в тех случаях, когда состояние дороги позволяет обеспечить равномерное, плавное (без толчков) движение машины со скоростью не более 20 км/ч. В остальных случаях стрельба ведется, как правило, с короткой остановки или с места, для чего командир машины подает соответствующую команду механику-водителю. После производства пуска движение продолжается прежним порядком.
80. Стрельба по маневрирующим воздушным целям является наиболее вероятным случаем стрельбы по низколетящим самолетам.
Воздушный противник может осуществлять маневр в целях снижения эффективности действия средств противовоздушной обороны или выбора способа нанесения удара по объекту. Комплекс обеспечивает эффективную стрельбу по целям, совершающим следующие виды маневра:
— пикирование (планирование) и кабрирование;
— маневр курсом и высотой.
Стрельба по маневрирующей цели ведется при условии надежного захвата ее тепловой следящей головкой самонаведения.
При стрельбе по пикирующей цели захват ее и пуск ракеты, как правило, производятся в момент выхода цели из пикирования.
Если цель кабрирует или совершает маневр курсом в сторону от стрелка-зенитчика, то время пребывания цели в зоне пуска уменьшается; поэтому пуск ракеты должен производиться немедленно по окончании подготовки стрельбы.
В случае непоражения маневрирующей цели стрелок-зенитчик продолжает наблюдение за ее полетом для своевременной подготовки стрельбы при очередном заходе цели на объект.
81. В условиях сложной фоновой обстановки и в солнечную погоду стрелок-зенитчик выбирает стартовую позицию с таким расчетом, чтобы солнечные лучи или неоднородный фон не препятствовали ведению огня по целям, действующим над прикрываемым подразделением. Захват цели и пуск ракеты необходимо производить при пролете целью участка неба с равномерным фоном.
По целям с малым собственным излучением (истребителям, вертолетам) стрельба ведется при однородном или облачном фоне до 3 баллов.
По целям с большим собственным излучением (бомбардировщикам) стрельбу можно вести и при облачности более 3 баллов. Стрельба по этим целям невозможна только на фоне высококонтрастных подсвеченных солнечными лучами кучевых облаков от 3 до 10 баллов в дневное время суток. Ночью, в утренние и вечерние сумерки облачность на работу комплекса не влияет.
Пуск ракеты не производить в случаях:
— если в поле зрения тепловой следящей головки самонаведения попадают ярко освещенные солнечными лучами участки облачности или края облаков;
— если цель находится на фоне освещенных солнечными лучами местных предметов, на линии горизонта или на фоне объектов, имеющих собственное тепловое излучение;
— если в момент пуска цель находится на однородном фоне, но впереди по курсу движения цели вблизи нее (на участке наведения ракеты) находятся кучевые облака или местные предметы, создающие тепловое излучение.
При сложной фоновой обстановке обстрел цели производится, как правило, несколькими комплексами.
Если во время стрельбы появляются сильные посторонние шумы (гул двигателей машин, шум артиллерийского обстрела и др.), то стрелок-зенитчик определяет надежность захвата цели тепловой следящей головкой самонаведения только по световому сигналу.
82. Стрельба в сложных метеорологических условиях:
— при сильном дожде или снегопаде пуск ракеты не разрешается;
— в условиях ограниченной видимости (в сумерках, при тумане, небольшом дожде или снегопаде) стрельба разрешается, если обеспечивается визуальное обнаружение цели, возможность прицеливания и имеются звуковой и световой сигналы о захвате цели тепловой следящей головкой самонаведения.
При стрельбе в сумерках во избежание ослепления стрелка-зенитчика лампочка световой сигнализации закрывается диафрагмой.
83. Стрельба по цели, периодически скрывающейся за облаками, ведется при нахождении цели на открытых участках курса с учетом конкретной фоновой обстановки. Если цель скрылась за облаками до пуска ракеты, то стрелок-зенитчик арретирует следящий координатор цели (если он был разарретирован) и наводит трубу на противоположный край облака для захвата цели и ведения стрельбы после выхода цели из-за облака.
84. Стрельба по внезапно появившейся цели ведется стрелком-зенитчиком, как правило, самостоятельно после ее опознавания (не ожидая команды командира). При этом он быстро изготавливается к стрельбе, включает источник питания и по первым сигналам о надежном захвате цели производит пуск.
85. Стрельба группой комплексов ведется по команде командира роты. Он назначает вид огня в соответствии со ст. 66. Если в воздухе находится несколько целей, то командир роты сосредоточивает или распределяет огонь комплексов по целям.
Сосредоточение огня заключается в одновременном обстреле выбранной цели всеми или несколькими комплексами роты. Оно применяется при неоднородном фоне, при наличии в зоне пуска комплексов одной цели или нескольких целей, из которых для уничтожения выбирается наиболее важная. При этом для ведения огня в зависимости от характера цели, обстановки, наличия ракет, размещения стрелков-зенитчиков и их слаженности могут привлекаться: по скоростной цели — два-четыре комплекса, по вертолету или другой малоскоростной цели — один-два комплекса. Интервал между пусками ракет в залпе не должен превышать 0,5 сек.
Распределение огня заключается в одновременном или последовательном обстреле нескольких целей одним или несколькими комплексами. Оно применяется при наличии в зоне пуска комплексов нескольких одинаково важных воздушных целей.
86. Во время стрельбы стрелок-зенитчик должен непрерывно вести наблюдение за результатами стрельбы в целях: определения действительности стрельбы; выявления ошибок в определении входных данных для стрельбы, границ зоны пуска и фоновой обстановки; определения управляемости ракеты на полете; изучения характера действия самолетов противника при их обстреле.
87. Признаками действительности стрельбы являются:
— уничтожение цели;
— резкое изменение целью высоты, курса или скорости полета непосредственно после попадания ракеты в цель.
Признаками правильных действий стрелка-зенитчика и своевременного пуска ракеты являются уничтожение цели или пролет ракеты в непосредственной близости от нее.
Наблюдая за полетом ракеты, стрелок-зенитчик устанавливает степень управляемости ракеты, выявляет причины срыва наведения. По результатам стрельб, проводимых в одинаковых условиях, уточняются характер теплового излучения самолетов на различных дальностях, высотах и ракурсах, размеры зоны пуска для отдельных типов самолетов, влияние отдельных видов фоновых и тепловых помех, устанавливается точность определения входных данных. Выводы по результатам наблюдения обобщаются и используются при последующих стрельбах.
ЧАСТЬ ТРЕТЬЯ
БОЕВОЕ ПРИМЕНЕНИЕ ПЕРЕНОСНОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА“ СТРЕЛА— 2”
Глава V
ОБЩИЕ ПОЛОЖЕНИЯ
88. Мотострелковые, танковые, парашютнодесантные подразделения, вооруженные комплексом «Стрела-2», способны во взаимодействии с другими средствами противовоздушной обороны дивизии (полка) эффективно вести борьбу с воздушным противником: отражать налеты низколетящих самолетов по войскам, уничтожать самолеты армейской авиации и воздушные десанты в воздухе, не допускать ведения воздушной разведки с малых высот, действиями комплексов из засад перекрывать маршруты скрытного подхода авиации противника на малых высотах к объектам.
89. Комплексами вооружаются штатные стрелки-зенитчики подразделений и специально обученные стрелки и экипажи танков.
Стрелки-зенитчики выполняют боевые задачи, действуя в походных, предбоевых и боевых порядках роты (взвода) во всех видах боя, на марше и при расположении войск на месте, а также при перевозках войск железнодорожным и водным транспортом.
Экипажи танков, вооруженные комплексами, ведут борьбу с воздушным противником, как правило, в тех случаях, когда они не участвуют в бою с наземным противником, а также когда по условиям обстановки уничтожение воздушного противника становится более важным.
Ночью, при густом тумане, сильном дожде, снегопаде и в других условиях, когда применение комплекса невозможно, или при отсутствии ракет стрелки-зенитчики ведут бой в составе своих подразделений, используя личное оружие.
90. Главной задачей стрелков-зенитчиков в бою является уничтожение низколетящих воздушных целей.
Бой с воздушным противником начинается с момента обнаружения целей и может охватывать одну или несколько огневых задач, выполняемых одновременно или последовательно. Он отличается скоротечностью и ведется обычно в сложной, резко меняющейся воздушной обстановке, требуя от стрелков-зенитчиков высокой организованности, крепкой воинской дисциплины, мастерского владения своим оружием, проявления инициативы, полного напряжения моральных и физических сил.
91. Успешное выполнение стрелком-зенитчиком задач в бою обеспечивается: знанием боевой задачи роты (взвода); умелым использованием местности, правильным выбором стартовых позиций; непрерывным наблюдением за воздушным противником, своевременным его обнаружением и опознаванием; полным использованием боевых возможностей комплекса; быстрыми и сноровистыми действиями при ведении огня; правильным расходованием ракет и бесперебойным их пополнением.
92. Боевые возможности комплекса характеризуются его огневыми и маневренными возможностями.
Огневые возможности комплекса определяются:
— вероятностью поражения одиночной цели за стрельбу;
— размерами зоны поражения и ограничениями в работе комплекса;
— временем, необходимым для подготовки и проведения последующего пуска.
Маневренные возможности комплекса характеризуются временем, затрачиваемым на подготовку комплекса к стрельбе, и возможностями по перемещению стрелка-зенитчика на поле боя.
Высокий уровень общей, политической и военно-технической подготовки стрелков-зенитчиков, глубокое понимание ими своего воинского долга резко повышают степень использования боевых возможностей оружия и способствуют проявлению активности, решительности, героизма и отваги в бою.
93. Командир роты (взвода) несет ответственность за успешное выполнение стрелками-зенитчиками задач в бою и своевременное открытие огня по воздушным целям. Он организует разведку воздушного противника, оповещение и целеуказание. На марше, при расположении войск на месте и в случаях, когда по условиям обстановки командир роты непосредственно не руководит боем с наземным противником, он управляет огнем стрелков-зенитчиков, подавая команды и сигналы по радио, внутреннему переговорному устройству, голосом или сигнальными средствами, и принимает меры к пополнению ракетами.
В устном боевом приказе (распоряжении) командир роты (взвода) указывает стрелкам-зенитчикам места их нахождения в походном, предбоевом и боевом порядках роты (взвода), порядок разведки воздушного противника, получения оповещения и целеуказания, огневые секторы, порядок выбора целей и ведения огня по ним, количество дежурных средств и порядок несения ими боевого дежурства, степени боевой готовности и порядок получения ракет.
94. Расположение стрелков-зенитчиков в походном, предбоевом и боевом порядках определяется командиром роты (взвода) и должно обеспечивать согласованную с действиями других средств противовоздушной обороны стройную систему огня, позволяющую эффективно отражать удары воздушного противника с любого направления; непрерывное круговое наблюдение и надежное оповещение; устойчивое управление, а также своевременное пополнение ракетами.
95. При расположении на месте стартовые позиции, как правило, выбираются вблизи командно-наблюдательного пункта роты (взвода) или на направлении наиболее вероятного налета авиации противника.
При действиях с боевых машин пехоты (бронетранспортеров, танков) места стрелков-зенитчиков определяются боевым расписанием.
При действиях роты (взвода) в пешем порядке стрелки-зенитчики следуют за цепями подразделений на удалении 20–40 м от командира роты (взвода) (рис. 26).

Рис. 26. Расположение стрелков-зенитчиков в боевом порядке мотострелковой роты (вариант)
96. В бою стрелки-зенитчики должны умело сочетать ведение огня с движением для обеспечения непрерывного прикрытия подразделений.
Маневр огнем применяется в целях наиболее успешного выполнения огневой задачи. Он заключается в сосредоточении или распределении огня по целям и в переносе огня с одной цели на другую.
Стрелок-зенитчик совершает маневр в целях занятия выгодного положения для ведения огня по воздушному противнику на наиболее опасных или выявленных направлениях скрытного подхода авиации противника на малых высотах к объектам удара. В бою стрелки-зенитчики должны перемещаться, как правило, от рубежа к рубежу с использованием выгодных условий местности, скрытно и быстро.
97. Разведка воздушного противника организуется в целях своевременного обнаружения и опознавания его, а также обеспечения целеуказания стрелкам-зенитчикам.
Своевременное обнаружение самолетов противника достигается ведением непрерывного кругового наблюдения. Для этого в роте (взводе) во всех видах боевых действий, на марше и при расположении войск на месте назначаются
наблюдатели из числа стрелков-зенитчиков (стрелков).
Наблюдателю указывается сектор наблюдения по ориентирным направлениям путем подачи команды, например: «РЯДОВОЙ ПЕТРОВ, СЕКТОР НАБЛЮДЕНИЯ: СПРАВА — ОРИЕНТИР ОДИН, СЛЕВА — ОРИЕНТИР ТРИДЦАТЬ ДВА».
Секторы наблюдения назначаются с таким расчетом, чтобы обеспечить круговой обзор воздушного пространства и перекрытие границ соседних секторов.
Смена наблюдателей в зависимости от обстановки производится через 1―2 ч, а на марше, как правило, через 60―30 мин.
98. Наблюдатель обязан своевременно обнаруживать в своем секторе воздушные цели, особенно цели, действующие на малых высотах, уметь их опознавать и определять их характеристики, а также наблюдать за сигналами оповещения.
Обзор воздушного пространства наблюдатель начинает с малых углов (на уровне глаз). Затем просматривает воздушное пространство под углом 15―20° (рис. 27). Если цель не обнаружена, осмотр сектора повторяется.
Обнаружив цель, наблюдатель определяет ее принадлежность, количество и тип самолетов, высоту и направление их полета и докладывает, например: «ВОЗДУХ, НАД ТРЕТЬИМ, ОДИН Ф-100, ВЫСОТА 00». О своих самолетах наблюдатель докладывает, например: «СВОИ, НАД ПЕРВЫМ, ДВА МиГ-21, ВЫСОТА 00».

Рис. 27. Порядок обзора воздушного пространства
99. Для успешного ведения визуального наблюдения стрелок-зенитчик (стрелок) должен знать: силуэты самолетов и вертолетов противника, их основные характеристики и отличительные признаки, тактические приемы действий воздушного противника, силуэты своих самолетов и вертолетов, сигналы опознавания своей авиации.
Для обеспечения безопасности пролетов своей авиации командир роты доводит до стрелков-зенитчиков сигнал «Я свой самолет», а также порядок пролета своих самолетов.
100. Оповещение о воздушном противнике и действиях своей авиации, как правило, производится по командным сетям управления, обычно по радио, а в обороне и при расположении на месте — также и по проводным линиям связи. Для оповещения, кроме того, могут применяться звуковые и световые сигналы, установленные старшим начальником.
Сигналы оповещения и порядок действий по ним должен знать весь личный состав.
101. Оповещение (целеуказание) может осуществляться:
— по ориентирным направлениям по странам света;
— по ориентирным направлениям относительно движения колонны (машины);
— по ориентирам на местности.
Ориентирные направления по странам света нумеруются: север — 1, запад — 2, юг — 3, восток — 4. Промежуточные направления обозначаются двузначными числами: 12 — северо-запад, 32 — юго-запад, 34 — юго-восток, 14 — северо-восток. Этот способ ориентирования применяется в ходе боя и при расположении на месте.
На марше, при действиях в предбоевых и боевых порядках на машинах положение цели указывается относительно движения колонны (машины): справа, слева, спереди, сзади.
Ориентиры на местности выбираются на удалении 6–8 км от позиции и нумеруются с номера 41, начиная по часовой стрелке. Этот способ применяется при расположении на месте и в обороне.
102. Сигналы оповещения доводятся до личного состава путем подачи команд, например: «НАД ДВЕНАДЦАТЫМ (номер ориентирного направления), ОДИН Ф-105, ВЫСОТА 00 (в гм), ДАЛЬНОСТЬ (в гм)»; «ВОЗДУХ, СЛЕВА (спереди справа сзади), ДВА Ф-105, ВЫСОТА 00, ДАЛЬНОСТЬ 00 (в гм)» или «ВОЗДУХ, НАД СОРОК ПЕРВЫМ (номер ориентира на местности), ОДИН Ф-105, ВЫСОТА 00, ДАЛЬНОСТЬ 00». Кроме того, направление на цель может указываться рукой, сигнальными флажками, стрельбой трассирующими пулями или сигнальной ракетой в направлении цели.
103. Стрелки-зенитчики изготавливаются для отражения воздушного противника по команде (сигналу) командира роты (взвода): «ВОЗДУХ, ГОТОВНОСТЬ НОМЕР ОДИН». По этой команде стрелки-зенитчики занимают свои места на стартовых позициях, в боевых машинах (бронетранспортерах, танках), переводят комплексы в боевое положение и докладывают: «ТАКОЙ-ТО ГОТОВ».
Для распределения целей между стрелками-зенитчиками командир роты командует: «ПО САМОЛЕТАМ, НАД ТАКИМ-ТО, ТАКОМУ-ТО ПО ПРАВОМУ, ТАКОМУ-ТО ПО ЛЕВОМУ. ОГОНЬ». По этой команде стрелки-зенитчики самостоятельно открывают огонь по назначенной цели.
Для обстрела самолетов, летящих с разных направлений, когда невозможно распределить цели, командир командует: «ПО САМОЛЕТАМ В СВОИХ СЕКТОРАХ. ОГОНЬ». По этой команде стрелки-зенитчики производят поиск, выбирают цель в назначенном секторе и самостоятельно открывают огонь.
Для открытия огня залпом несколькими комплексами командир роты командует: «ТАКИМ-ТО, ПО САМОЛЕТУ НАД ПЕРВЫМ, ЗАЛПОМ. ОГОНЬ».
104. Взаимодействие стрелков-зенитчиков между собой, а также с прикрываемыми подразделениями и с другими средствами противовоздушной обороны обеспечивается знанием задач прикрываемых подразделений, учетом огневого воздействия по воздушным целям соседних стрелков-зенитчиков и других средств противовоздушной обороны, взаимным оповещением и целеуказанием.
105. В зависимости от обстановки стрелки-зенитчики могут находиться в одной из трех степеней готовности:
— готовность номер один (СГ-1) — комплекс в боевом положении, стрелок-зенитчик ведет наблюдение в назначенном ему секторе в готовности к немедленному открытию огня, имея комплекс на плече;
— готовность номер два (СГ-2) — комплекс в боевом положении (на подкладках в окопе, в укладке машины, в положении «за спину»), стрелок-зенитчик находится на месте, указанном командиром (в районе стартовой позиции, в машине);
— готовность номер три (СГ-3) — комплекс в походном положении или в парковой укупорке, стрелок-зенитчик находится в расположении роты (взвода) на отдыхе или на занятиях.
Количество стрелков-зенитчиков, находящихся в различных степенях готовности, и время перехода из одной степени готовности в другую устанавливаются командиром роты или по распоряжению старшего начальника.
106. Для уничтожения внезапно появляющихся целей в роте назначаются дежурные стрелки-зенитчики, которые находятся в готовности номер один. Дежурный стрелок-зенитчик ведет наблюдение в назначенном ему секторе (круговое наблюдение) и самостоятельно открывает огонь по обнаруженным и опознанным целям. Кроме того, он должен быть готов по команде командира роты (взвода) открыть огонь по цели, летящей с любого направления.
107. В наступательном бою стрелок-зенитчик носит одну трубу с ракетой, а для переноски второй трубы с ракетой может назначаться один из стрелков роты (взвода). При действиях на боевых машинах (бронетранспортерах, танках) на каждого стрелка-зенитчика возится по две трубы с ракетами в специальной укладке. В оборонительном бою количество ракет на стартовых позициях стрелков-зенитчиков по указанию старшего начальника может быть увеличено.
Расход ракет устанавливается командиром роты и определяется исходя из норм расхода, установленных старшим начальником на день боя, наличия ракет в роте и возможностей их пополнения. О расходе и наличии ракет стрелок-зенитчик докладывает командиру роты (взвода). Пополнение ракетами производится: на марше — на привалах, в районах дневного (ночного) отдыха и по прибытии в назначенный район; в ходе боя — путем подвоза непосредственно к боевым машинам (бронетранспортерам, танкам), находящимся в боевых порядках; при действиях в пешем порядке — подносчиками, выделенными командиром подразделения.
108. При действиях на зараженной местности стрелок-зенитчик продолжает выполнять боевую задачу в средствах индивидуальной защиты (см. рис. 13). Частичная дегазация, дезактивация и дезинфекция комплекса производится по распоряжению командира роты (взвода) в соответствии с приложением 4.
Глава VI
БОЕВЫЕ ДЕЙСТВИЯ СТРЕЛКОВ-ЗЕНИТЧИКОВ
109. На марше стрелки-зенитчики находятся, как правило, в боевых машинах пехоты (бронетранспортерах, автомобилях) командиров рот (взводов). Отдельные стрелки-зенитчики могут назначаться в состав разведывательных групп и походного охранения.
Для отражения внезапного удара воздушного противника и непрерывного наблюдения за воздухом в зависимости от обстановки, времени суток, наличия других средств противовоздушной обороны по решению командира часть стрелков-зенитчиков находится в готовности номер один, остальные, как правило, в готовности номер два. В зависимости от наличия других средств противовоздушной обороны в готовности номер один может находиться до 50 % стрелков-зенитчиков батальона (роты). При прохождении открытых участков местности, теснин, узлов дорог, дефиле, а также на больших привалах и в районах дневного отдыха количество дежурных средств может увеличиваться.
Смена дежурных стрелков-зенитчиков производится обычно через 60―30 мин.
На малых привалах дежурные стрелки-зенитчики спешиваются и занимают стартовые позиции вблизи колонны. На больших привалах и в районах дневного отдыха расположение дежурных стрелков-зенитчиков определяется, как правило, начальником колонны с учетом боевых порядков других средств противовоздушной обороны.
110. Оповещение о воздушном противнике осуществляется командиром роты по данным начальника ПВО дивизии (полка) по радио, а также наблюдателями путем подачи установленных сигналов.
При получении оповещения о воздушном противнике командир батальона (роты) немедленно подает сигнал «Воздух, готовность номер один». Огонь открывается, как правило, по команде командиров подразделений и в зависимости от состояния дороги может вестись в движении, с короткой остановки или с места. Для стрельбы с места (с короткой остановки) механик-водитель по команде командира останавливает машину на обочине дороги и после пуска ракет продолжает движение установленным порядком. Внезапные удары воздушного противника отражаются дежурными стрелками-зенитчиками самостоятельно в соответствии с ранее полученными указаниями о порядке ведения огня.
111. При перевозке войск железнодорожным и водным транспортом стрелки-зенитчики прикрывают подразделения в районах ожидания и сбора, при погрузке, выгрузке и в пути следования.
Для отражения внезапных ударов авиации противника по эшелонам и судам по распоряжению начальника эшелона назначаются дежурные стрелки-зенитчики. В железнодорожном эшелоне они располагаются на открытых платформах в голове, середине и хвостовой части поезда. На соседних платформах не должно быть высоких грузов, мешающих пуску ракет. На судах стрелки-зенитчики располагаются на верхних палубах.
Дежурные стрелки-зенитчики сменяются на остановках поезда, а на судах — через 1―2 ч.
Оповещение о воздушном противнике стрелки-зенитчики получают, как правило, от начальника эшелона по телефону или сигналами. Огонь по обнаруженным и опознанным целям они открывают по команде командира роты (взвода) или самостоятельно.
112. При наступлении с ходу с началом выдвижения из района сосредоточения противовоздушная оборона подразделений ведется, как правило, дежурными средствами. С развертыванием подразделений в предбоевой порядок количество дежурных средств может быть увеличено, а с развертыванием в боевой порядок, как правило, все стрелки-зенитчики переводятся в готовность номер один.
Стрелки-зенитчики танковых рот при выдвижении из района сосредоточения к рубежу атаки ведут непрерывное наблюдение за воздушным противником через открытые люки башен танков, имея комплексы в боевом положении. С началом развертывания роты (взвода) в боевую линию по распоряжению командира роты комплекс может переводиться в походное положение.
Если роты атакуют противника на боевых машинах пехоты (бронетранспортерах), то стрелки-зенитчики прикрывают подразделения огнем с машин. При атаке в пешем порядке стрелки-зенитчики спешиваются, имея комплекс в боевом положении, и бегом или ускоренным шагом продолжают движение за наступающими цепями роты (взвода) от рубежа к рубежу, последовательно занимая временные стартовые позиции и следуя, как правило, в непосредственной близости от командира роты (взвода).
При обнаружении воздушного противника или при получении оповещения (целеуказания) стрелки-зенитчики изготавливаются к стрельбе с места и ведут огонь, как правило, самостоятельно в соответствии с полученными указаниями о порядке открытия огня и расходе ракет.
113. При наступлении из положения непосредственного соприкосновения с противником с выходом в исходное положение для наступления стрелки-зенитчики оборудуют стартовые позиции обычно вблизи командно-наблюдательного пункта роты (взвода).
При занятии исходного положения ночью с рассветом организуется дежурство стрелков-зенитчиков, а с началом огневой подготовки, как правило, все стрелки-зенитчики переводятся в готовность номер один и усиливается наблюдение за воздушным противником. В дальнейшем стрелки-зенитчики действуют так же, как и при наступлении с ходу.
С переходом к преследованию противника стрелки-зенитчики занимают места в машинах, а дежурные стрелки-зенитчики изготавливаются к стрельбе.
114. При наступлении с форсированием водной преграды с ходу стрелки-зенитчики переправляются на противоположный берег, как правило, в составе своих подразделений. При переправе на плавающих бронетранспортерах и других переправочно-десантных средствах стрелки-зенитчики находятся в готовности к отражению ударов авиации противника огнем на плаву. При переправе на боевых машинах пехоты с закрытыми десантными люками стрелки-зенитчики находятся в готовности номер два.
При форсировании водной преграды с предварительной подготовкой отдельные стрелки-зенитчики могут привлекаться для прикрытия участков форсирования. При этом им указываются места стартовых позиций, порядок прикрытия и переправы на противоположный берег. В этом случае стартовые позиции выбираются, как правило, на островах, мелях, дамбах или непосредственно на берегу и оборудуются в инженерном отношении. Часть стрелков-зенитчиков переправляется на противоположный берег с первыми эшелонами.
Стрелки-зенитчики танковых подразделений, форсирующих водную преграду под водой, занимают стартовые позиции в районе проведения работ по герметизации танков. К началу выдвижения танков к переправе они занимают свои места и переводят комплексы в походное положение.
При спешивании личного состава подразделений с выходом на противоположный берег стрелки-зенитчики действуют в соответствии со ст. 112.
115. В обороне стартовые позиции для стрелков-зенитчиков назначаются командиром роты (взвода) с учетом расположения других средств ПВО. Они, как правило, выбираются в пределах опорного пункта роты (взвода) в непосредственной близости от командно-наблюдательного пункта роты (взвода), оборудуются в инженерном отношении и маскируются. Кроме основной стартовой позиции выбирается и оборудуется запасная стартовая позиция.
Для удобства управления стрелками-зенитчиками они могут сводиться в группу, которая располагается обычно в районе командно-наблюдательного пункта роты. Для каждого стрелка-зенитчика отрывается окоп. Впереди окопа производится расчистка местности для улучшения условий наблюдения и ведения огня.
Для осуществления оповещения (целеуказания) ориентиры на местности нумеруются и определяется дальность до них. Ориентирные направления по странам света обозначаются вехами (провешиваются).
Подразделения, назначенные в боевое охранение, а также подразделения, обороняющие полосу обеспечения или передовую позицию могут усиливаться стрелками-зенитчиками за счет других подразделений.
Отдельные стрелки-зенитчики могут действовать из засад, при этом стартовые позиции для них могут назначаться за пределами опорного пункта роты (взвода) на направлениях вероятного полета низколетящих целей вдоль складок местности.
116. При действиях в горах стрелки-зенитчики могут включаться в состав передовых и обходящих отрядов. Боевые действия они ведут обычно в пешем порядке.
Стартовые позиции выбираются на склонах гор, на отдельных высотах и площадках с наименьшими углами закрытия. Часть стрелков-зенитчиков может располагаться в седловинах, широких ущельях и глубоких долинах, обеспечивающих возможность ведения огня по самолетам противника на фоне неба.
117. При действиях в городе стрелки-зенитчики могут включаться в состав штурмовых отрядов и групп. Для обеспечения кругового обзора воздушного пространства стрелки-зенитчики располагаются на высоких строениях и вышках. При отсутствии кругового обзора с одного места стрелки-зенитчики размещаются так, чтобы их секторы наблюдения взаимно дополняли друг друга, обеспечивая круговое наблюдение.
Стартовые позиции занимаются на стадионах, площадях, широких магистральных улицах, на пустырях, в парках, на крышах зданий.
118. В лесу стартовые позиции выбираются на опушках леса, больших полянах, вырубках, широких просеках и дорогах. При наличии в лесу озер и болот стартовые позиции можно оборудовать на них, используя плавающие штатные и подручные средства, гати и настилы, острова и полуострова. Отдельные стрелки-зенитчики могут размещаться на высоких деревьях. В необходимых случаях производится расчистка секторов наблюдения и обстрела.
119. При прикрытии объектов (командных пунктов, стартовых позиций ракетных подразделений, мостов, переправ и т. п.) стрелки-зенитчики могут сводиться в группу. При этом создается единая система разведки воздушного противника, оповещения и управления огнем. Стартовые позиции для стрелков-зенитчиков выбираются с учетом ожидаемого характера действий воздушного противника, размеров объекта, условий местности и наличия других средств противовоздушной обороны в пределах прикрываемого объекта или на удалении 500―1000 м от него.
120. При действиях в составе парашютнодесантных подразделений стрелки-зенитчики под руководством заместителя начальника парашютнодесантной службы части подготавливают комплексы к десантированию, производят их загрузку в парашютные мешки и крепление на парашютные платформы, а также погрузку комплексов в кабины самолетов и вертолетов.
В районе десантирования стрелки-зенитчики занимают стартовые позиции вблизи площадок приземления на направлениях выдвижения парашютнодесантных подразделений в пункты сбора или к объектам захвата (уничтожения).
В ходе боевых действий десанта стрелки-зенитчики могут действовать в составе своих подразделений или использоваться централизовано по решению командира десанта для прикрытия подразделения, выполняющего наиболее важную задачу.
ПРИЛОЖЕНИЕ 1
(к ст. 62)
ВИДЫ ФОНОВОЙ ОБСТАНОВКИ И ОСОБЕННОСТИ ОБСТРЕЛА ЦЕЛЕЙ ПРИ РАЗЛИЧНЫХ ФОНОВЫХ СИТУАЦИЯХ
Однородный фон — чистое небо, сплошная облачность (большой облачный массив) или легкая перистая облачность, не имеющая резких тепловых контрастов (ярко подсвеченных солнечными лучами участков) и разрывов.
Неоднородный (сложный) фон — на участке неба в направлении стрельбы находятся высокослоистые, слоисто-кучевые, кучевые, кучево-дождевые, высококучевые облака с резко очерченными краями, освещенными солнечными лучами, или облака, имеющие внутренний тепловой контраст (внутри облака имеются ярко освещенные солнечными лучами участки).
Вероятность и дальность захвата, а также устойчивость сопровождения цели зависят от состояния атмосферы (наличия дымки, тумана, снега, дождя), освещенности цели и фоновой обстановки.
Если в поле зрения тепловой следящей головки самонаведения попадает освещенный солнечными лучами край облака, линия горизонта, местные предметы, отражающие солнечную энергию или имеющие собственное излучение (пожары, тепловые излучения промышленных объектов, стартующие или находящиеся в полете ракеты, светящиеся авиабомбы и другие объекты), то тепловая следящая головка самонаведения может захватить их или перейти со слежения за целью на слежение за краем облака, местным предметом или линией горизонта.
Возможные фоновые ситуации, возникающие при стрельбе, показаны на рис. 28. Виды облачности, относящейся к сложному фону, показаны на рис. 29.

Рис. 28. Возможные фоновые ситуации при стрельбе:
1 — цель и поле зрения тепловой следящей головки самонаведения на однородном фоне и впереди по курсу цели фон однородный на расстоянии не менее tполuц = (10÷12 сек)×(100÷200 м/сек) = 1000÷2500 м. Условия благоприятные; 2 — цель и поле зрения тепловой следящей головки самонаведения на однородном фоне, но вблизи по курсу цели на расстоянии менее tполuц находится сильный источник теплового излучения. Условия для пуска неблагоприятные; 3 — цель и поле зрения тепловой следящей головки самонаведения на неоднородном фоне. Условия пуска неблагоприятные

а

б

в

г

д

е
Рис. 29. Виды облачности:
а — кучевые облака; б — сплошные слоистые облака; в — высококучевые волнистые подсвечивающие облака; г — перистые когтевидные облака; д — высококучевые просвечивающие облака; е — кучевые плоские облака
======== — участки курса, благоприятные для обстрела;
= = = = = = — участки курса, на которых возможен срыв наведения ракеты
ПРИЛОЖЕНИЕ 2
(к ст. 69)
СИЛУЭТЫ, КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ И ТАКТИКО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ОСНОВНЫХ ТИПОВ САМОЛЕТОВ И ВЕРТОЛЕТОВ США И СТРАН НАТО
G.91A (Италия)
Конструктивные особенности:
— низкорасположенное стреловидное крыло (угол стреловидности 38°) а;
— своеобразная конфигурация носовой части фюзеляжа, которая имеет сверху обтекатель заостренной формы б, а снизу — воздухозаборник двигателя в характерной формы.
Назначение: тактический истребитель.
Тактико-технические характеристики
Максимальная скорость у земли 1100 км/ч (310 м/сек)
Минимальная высота боевого применения 150 м
Размах крыла 9 м
Длина самолета 10,4 м

F-104 «Старфайтер» (США)
Конструктивные особенности:
— трапециевидное крыло а;
— фюзеляж большого удлинения б с сильно заостренной в и слегка опущенной носовой частью г;
— стабилизатор трапециевидной формы д, расположенный в верхней части киля;
— полукруглые воздухозаборники двигателя е, расположенные с обеих сторон фюзеляжа;
— характерная конфигурация нижнего киля ж, передняя часть которого срезана под прямым углом з.
Назначение: тактический истребитель.
Тактико-технические характеристики
Максимальная скорость у земли 1320 км/ч (365 м/сек)
Минимальная высота боевого применения 30―80 м
Размах крыла 6,7 м
Длина самолета 16,7 м

F-105D «Тандерчиф» (США)
Конструктивные особенности:
— среднерасположенное стреловидное крыло а;
— низкорасположенное хвостовое горизонтальное оперение б;
— характерная конфигурация воздухозаборников двигателя в;
— высокое вертикальное оперение г;
— характерное очертание нижнего киля д.
Назначение: тактический истребитель.
Тактико-технические характеристики
Максимальная скорость у земли 1340 км/ч (370 м/сек)
Минимальная высота боевого применения 150 м
Размах крыла 10,6 м
Длина самолета 19,2 м

«Мираж IIIC», «Мираж IIIE» (Франция)
Конструктивные особенности:
— треугольное низкорасположенное крыло а;
— отсутствие горизонтального хвостового оперения;
— характерная конфигурация воздухозаборника двигателя б, симметрично расположенного по сторонам фюзеляжа на уровне задней части кабины;
— высокорасположенный киль большой площади в, начинающийся примерно с центральной части фюзеляжа г.
Назначение: всепогодный истребитель-перехватчик, тактический истребитель.
Тактико-технические характеристики
Максимальная скорость у земли 920 км/ч (255 м/сек)
Минимальная высота боевого применения 150 м
Размах крыла 8,2 м
Длина самолета 13,8 м

F— 4C (США)
Конструктивные особенности:
— низкорасположенное стреловидное крыло (угол стреловидности 45°) а с приподнятыми консолями полукрыльев б;
— характерная конфигурация воздухозаборников двигателей в;
— стреловидное горизонтальное хвостовое оперение г с резко выраженным отрицательным углом наклона д, равным 23°.
Назначение: тактический истребитель.
Тактико-технические характеристики
Максимальная скорость у земли 1450 км/ч (400 м/сек)
Минимальная высота боевого применения 50―300 м
Размах крыла 11,7 м
Длина самолета 17,6 м

F-111A (США)
Конструктивные особенности:
— верхнее расположение крыла а;
— крыло с изменяемым в полете углом стреловидности от 16° б до 72° в;
— характерное очертание воздухозаборников двигателя г, симметрично расположенных по сторонам фюзеляжа.
Назначение: многоцелевой истребитель.
Тактико-технические характеристики
Максимальная скорость у земли 1470 км/ч (410 м/сек)
Минимальная высота боевого применения 60―150 м
Размах крыла 9,75―19,2 м
Длина самолета 22 м

F— 8C (F-8D, F-8E) «Крусейдер» (США)
Конструктивные особенности:
— высокорасположенное стреловидное крыло а;
— среднее расположение горизонтального хвостового оперения б;
— характерная конфигурация носовой части фюзеляжа в с расположенным под ней воздухозаборником специфической формы г.
Назначение: истребитель-перехватчик.
Тактико-технические характеристики
Максимальная скорость у земли 1630 км/ч
Минимальная высота боевого применения Менее 300 м
Размах крыла 10,8 м
Длина самолета 16,5 м

A-4D (A-4E) «Скайхок» (США)
Конструктивные особенности:
— низкорасположенное стреловидное крыло а;
— характерная конфигурация воздухозаборников, расположенных по обе стороны фюзеляжа б;
— высокорасположенное горизонтальное хвостовое оперение в;
— киль большой площади, начинающийся примерно с середины фюзеляжа г;
— боковое расположение трубки приемника воздушного давления д.
Назначение: палубный штурмовик.
Тактико-технические характеристики
Максимальная скорость у земли 1100 км/ч (310 м/сек)
Минимальная высота боевого применения Менее 300 м
Размах крыла 8,2 м
Длина самолета 11,9 м

А-6А «Интрудер» (США)
Конструктивные особенности:
— высокорасположенное крыло а;
— высокорасположенное горизонтальное хвостовое оперение б;
— киль трапецеидальной формы в;
— воздухозаборники характерной формы, расположенные по бокам нижней части фюзеляжа г.
Назначение: палубный штурмовик.
Тактико-технические характеристики
Максимальная скорость у земли 1100 км/ч (310 м/сек)
Минимальная высота боевого применения Менее 300 м
Размах крыла 16,2 м
Длина самолета 16,3 м

OV-1A (OV-1B, OV— 1C) «Мохаук» (США)
Конструктивные особенности:
— среднерасположенное трапецеидальное крыло а;
— высокорасположенное трехкилевое хвостовое оперение б;
— две высокорасположенные моторные гондолы в.
Назначение: самолет для наблюдения (разведки, связи).
Тактико-технические характеристики
Максимальная скорость у земли 520 км/ч (145 м/сек)
Минимальная высота боевого применения Менее 500 м
Размах крыла 13 м
Длина самолета 13 м

СН-47А (СН-47В) «Чинук» (США)
Конструктивные особенности:
— два несущих винта а;
— специфическая форма фюзеляжа с двумя возвышениями б по концам;
— эллиптические уширения в по бортам нижней части фюзеляжа на всю его длину.
Назначение: транспортно-десантный вертолет, вертолет огневой поддержки.
Тактико-технические характеристики
Максимальная скорость 280 км/ч (80 м/сек)
Длина фюзеляжа 15,54 м

UH-1 «Ирокез» (США)
Конструктивные особенности:
— один несущий винт а;
— хвостовой стабилизирующий винт малого диаметра б на выступающей вверх консоли в;
— характерная форма фюзеляжа с объемной передней частью г и суживающейся задней половиной д.
Назначение: многоцелевой вертолет.
Тактико-технические характеристики
Максимальная скорость у земли 220 км/ч (60 м/сек)
Длина фюзеляжа 11,7 м

ПРИЛОЖЕНИЕ 3
(к ст. 73)
Дальность до воздушных целей может определяться с помощью универсальной лиры, бинокля, по ориентирам на местности, по степени видимости и кажущейся величине цели.
1. Универсальная лира (рис. 30) состоит из следующих частей:
— неподвижной линейки со шкалой дальности в гектометрах, на которой деления нанесены: от 6 до 10 гм через 100 м, от 10 до 20 гм через 200 м, от 20 до 32 гм через 400 м;

Рис. 30. Универсальная лира:
1 — неподвижная линейка; 2 — дуга со шкалой; 3 — подвижная линейка; 4 — ось вращения; 5 — ручка; Н — расстояние соответствующего деления дальности от оси; Х — длина хорды от 0 до деления, указывающего размер самолета
— дуговой шкалы размеров самолета в метрах;
— подвижной линейки со шкалой дальности, индексом и отверстием для оси вращения линейки;
— ручки лиры.
Дальность до самолета с помощью универсальной лиры определяется в следующем порядке:
— при обнаружении самолета противника определить его тип;
— подвижную линейку лиры установить на деление дуговой шкалы, соответствующее размаху крыльев самолета (при движении самолета на наблюдателя или от него) или размеру фюзеляжа (при облическом движении);
— руку с лирой вытянуть на 60 см от глаза (рис. 31), при этом лиру держать в вертикальной плоскости перпендикулярно линии визирования и в наклонной плоскости параллельно крыльям самолета, если дальность измеряется по размаху крыльев, или параллельно курсу, если дальность измеряется по фюзеляжу;

Рис. 31. Определение дальности до самолета с помощью универсальной лиры
— заметить, в каком месте раствора лиры помещается самолет; цифра, стоящая на линейке в этом месте, указывает дальность до самолета в гектометрах.
2. С помощью бинокля дальность до самолета можно определить только в том случае, если известен размах крыльев или известна длина фюзеляжа самолета и он движется по курсу 0, 180 или 90°.
Дальность до самолета с помощью бинокля определяется в следующем порядке:
— при обнаружении самолета определить его тип;
— измерить угловую величину размаха крыльев (при курсе самолета 0 и 180°) или размера фюзеляжа (при курсе 90°);
— вычислить дальность по формуле Д = В /У×1000, где Д — дальность до самолета;
В — размах крыльев или длина фюзеляжа, м;
У — угол, измеренный по размаху крыльев или по размеру фюзеляжа.
3. По ориентирам на местности дальность до воздушной цели определяют при полете ее на малой высоте, когда можно определить над какой точкой местности цель находится.
На местности выбирают 10―12 ориентиров, измеряют расстояния до них и составляют схему ориентиров. При обнаружении цели определяют, над какой точкой местности она находится и, сравнивая дальность до этой точки с расстоянием до ближайшего к ней ориентира, определяют дальность до цели.
4. При определении расстояний до местных предметов по степени видимости и кажущейся величине цели необходимо видимую величину цели сравнить с запечатлевшимися в памяти видимыми размерами данной цели и видимостью деталей конструкции на определенных расстояниях. При этом можно руководствоваться данными, приведенными в таблице.
| Расстояние, м | Видимость |
|---|---|
| 5000 | Видны отдельные дома деревенского типа |
| 4000 | Различаются окна в домах |
| 3000 | Видны трубы на крышах |
| 2000 | Видны отдельные люди |
| 1000―900 | Можно отличить колонну пехоты от колонны автомобилей и танков. Видны километровые столбы и очертания фигуры человека |
| 800―700 | Заметно движение ног человека, на деревьях заметны большие сучья. Видны колья проволочного заграждения |
| 600―500 | Можно разглядеть переплеты окон, крупные детали дверей крыльца |
| 400―300 | Различаются очертания стрелкового оружие: пулемета, миномета, автомата и т. д. Виден цвет предметов одежды |
| 200―100 | Можно различить очертания головы и плеч человека, детали снаряжения. Заметна проволока проволочных заграждений. Видны детали стрелкового оружия |
При определении дальности по степени видимости и кажущейся величине цели нужно иметь в виду, что точность определения дальности зависит от остроты зрения, размеров и ясности очертания цели, ее окраски относительно наблюдаемого фона и освещенности.
ПРИЛОЖЕНИЕ 4
(к ст. 108)
ПОРЯДОК ДЕЗАКТИВАЦИИ, ДЕГАЗАЦИИ И ДЕЗИНФЕКЦИИ ПЕРЕНОСНОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА «СТРЕЛА-2»
1. Дезактивация переносного зенитного ракетного комплекса проводится путем протирания его ветошью, смоченной в дезактивирующем растворе или растворителе, а дегазация и дезинфекция — с помощью индивидуального дегазационного пакета ИДП-С.
2. При проведении дезактивации (дегазации, дезинфекции) комплекса необходимо:
— плотно закрыть крышки (переднюю и заднюю крышки и крышку разъема);
— тщательно обработать наружную поверхность пусковой трубы, источника питания и ремень;
— протереть насухо переднюю и заднюю крышки, снять их и протереть изнутри сухой ветошью; установить крышки на место;
— снять и протереть изнутри сухой ветошью крышку разъема, обработать разъем бензином (спиртом) и закрыть крышку;
— обработать пусковое устройство и источник питания смоченными в растворе тампонами, после чего протереть и просушить их;
— вытряхнуть, тщательно промыть и просушить чехол (при заражении отравляющими веществами и бактериальными средствами обработать чехол раствором из ИДП);
— в формулярах сделать отметки о проведенной обработке и записать результаты проверок и осмотров после нее.
Время проведения дезактивации (дегазации, дезинфекции) комплекса стрелком-зенитчиком примерно составляет 8―10 мин.
Примечания
1
Перистые облака — тонкие, нежные облачные нити, часто похожие на перья.
Кучевые облака — облака, состоящие из отдельных облачных образований с выпуклой вершиной.
Оценка облачности в баллах — отношение площади, закрытой облаками, ко всей пощади небосвода в процентах. Каждые 10 % равны 1 баллу.
(обратно)
Оглавление
УСТРОЙСТВО ПЕРЕНОСНОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА“ СТРЕЛА— 2” И ПРАВИЛА ОБРАЩЕНИЯ С НИМ
Глава I
НАЗНАЧЕНИЕ И УСТРОЙСТВО КОМПЛЕКСА
Глава II
РЕГЛАМЕНТНЫЕ РАБОТЫ, ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ, ХРАНЕНИЕ, СБЕРЕЖЕНИЕ И ТРАНСПОРТИРОВКА КОМПЛЕКСА
ПРИЕМЫ И ПРАВИЛА СТРЕЛЬБЫ ИЗ ПЕРЕНОСНОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА“ СТРЕЛА— 2”
Глава III
ПРИЕМЫ СТРЕЛЬБЫ
Глава IV
ПРАВИЛА СТРЕЛЬБЫ
БОЕВОЕ ПРИМЕНЕНИЕ ПЕРЕНОСНОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА“ СТРЕЛА— 2”
Глава V
ОБЩИЕ ПОЛОЖЕНИЯ
Глава VI
БОЕВЫЕ ДЕЙСТВИЯ СТРЕЛКОВ-ЗЕНИТЧИКОВ
(к ст. 62)
(к ст. 69)
(к ст. 73)
(к ст. 108)
1. УСТРОЙСТВО И ФУНКЦИОНИРОВАНИЕ ПЗРК
История создания переносных зенитных ракетных комплексов (ПЗРК) берёт свое начало с 60-х годов ХХ века. В то время на вооружении войск ПВО Сухопутных войск СССР в основном состояли зенитные пулемётные установки (ЗПУ) и зенитные артиллерийские комплексы (ЗАК), которые нуждались в средствах буксирования, имели значительное время развёртывания, заряжания, время реакции и цикл стрельбы, малую вероятность поражения. Кроме того, они также имели значительные массогабаритные характеристики, были заметны на поле боя, имели плохие манёвренные возможности.
Основная задача вышеперечисленных средств ПВО Сухопутных войск состояла в том, чтобы не допустить выполнения воздушным противником полётного задания по нанесению авиационного удара, а в идеальном случае — нанести повреждения или уничтожить средства воздушного нападения противника.
Возникла необходимость создания принципиально нового средства ПВО, которое находилось бы непосредственно в боевых порядках прикрываемых общевойсковых подразделений и не имело бы вышеупомянутых недостатков.
Решение задачи по созданию нового комплекса было поручено «Коломенскому ОКБ машиностроения». Техническое задание требовало создания дешёвого, технологичного, простого в обслуживании и изучении, малогабаритного, малозаметного зенитного ракетного комплекса, находящегося непосредственно в боевых порядках прикрываемых частей и подразделений. Комплекс должен применяться одним стрелком по всем типам воздушных целей с любой неподготовленной стартовой позиции, с земли, объектов автомобильной и бронетанковой техники, железнодорожных платформ, с места и в движении, с воды, со средств переправы, с крыш зданий и т. д., с соблюдением основных требований безопасности. Дальность стрельбы комплекса должна была составлять до 3000 м, а высота поражения до 1500 м.
За основу построения системы управления комплекса был принят ПТУР БМП, который наводился через оптический прицел по проводам. Но этот метод не обеспечивал решения поставленной задачи. Было принято революционное решение по созданию оптической головки самонаведения (ОГС), работающей в инфракрасном (тепловом) диапазоне волн.
Решение этой задачи было поручено киевскому объединению «АРСЕНАЛ» и «Ленинградскому оптико-механическому объединению (ЛОМО)», но за основу, была принята ОГС объединения «АРСЕНАЛ» как наиболее отвечающая техническому заданию.
Разработка комплекса была поручена коллективу инженеров, которым руководил главный конструктор по фамилии Непобедимый. В результате в ОКБ создан планер ракеты по схеме «утка» (рули впереди относительно центра масс, а крылья — сзади), система управления, двигательная установка, наземный блок питания, пусковой механизм, пусковая труба, переносные пассивный радиопеленгатор и наземный радиолокационный запросчик, средства технического обслуживания, учебно-тренировочные средства.
И в 1967 г., пройдя успешные государственные испытания, комплекс был принят на вооружение с индексом 9К32 «Стрела-2».

Рис. 1. ПЗРК 9К32 «Стрела-2»
Таблица 1
Основные тактико-технические характеристики
| 1 | Зона поражения при стрельбе вдогон: | |
|---|---|---|
| по дальности, м | 500–3200 | |
| по высоте, м | 30–2500 | |
| 2 | Максимальная скорость полёта поражаемого летательного аппарата, м/с | 220 |
| 3 | Эффективность стрельбы вдогон одной ЗУР | 0,19–0,25 |
| 4 | Масса комплекса в боевом положении, кг | 14,5 |
| 5 | Масса ЗУР 9М32, кг | 9,15 |
| 6 | Масса боевой части, кг | 1,17 |
Боевое крещение комплекс принял во время арабо-израильского конфликта в 1968 г. перед очередным, ожидаемым, налётом стрелки-зенитчики занимали свои стартовые позиции. Для противника противодействие было настолько неожиданным и ошеломляющим, что в течение нескольких дней налёты ВВС Израиля не осуществлялись. По неофициальным данным, комплексом было уничтожено до 20–30 % самолётов, участвовавших в налёте.
Комплекс подтвердил фамилию своего главного конструктора — Непобедимый, и своё название «Стрела» — невидимая, точная, легкая. Летчики противника не видели привычных позиций ПВО и не могли понять, какими средствами сбивались самолеты, тем более что основным видом стрельбы комплекса была стрельба на догонных курсах. Ракета попадала в сопло или в срез сопла самолёта, но иногда ракета выдувалась реактивной струёй двигателя. Одна из ракет 9М32 попала в сопло самолёта, не взорвалась, а зацепилась в нём своими аэродинамическими поверхностями. Она была успешно доставлена на аэродром противника, после чего попала в руки специалистов и была разобрана. Вражеской стороной был понят принцип работы ракеты и приняты меры по защите самолётов от ПЗРК — созданы специальные тепловые ловушки (ЛТЦ — ложные тепловые цели). Так был раскрыт секрет ранее неизвестного оружия.
Основными недостатками комплекса «Стрела-2» являлись малая дальность стрельбы (2000–2500 м), низкая помехозащищённость и вероятность поражения.
Следующим этапом создания ПЗРК явился комплекс «Стрела-2М». Внешне он не отличался от своего предшественника, но претерпел ряд существенных доработок. Возникшие трудности в вопросе увеличения дальности стрельбы и точности поражения решили с помощью установления датчика компенсации продольных и поперечных колебаний ракеты в полёте, который бы выдавал дополнительный сигнал в автопилот, пропорциональный этим колебаниям. Так же была применена более чувствительная головка самонаведения.

Рис. 2. ПЗРК 9К32М «Стрела-2М»
Таблица 2
Основные тактико-технические характеристики
| 1 | Зона поражения при стрельбе вдогон: | |
|---|---|---|
| по дальности, м | 500–4000 | |
| по высоте, м | 30–2700 | |
| 2 | Максимальная скорость полёта поражаемого летательного аппарата, м/с | 260 |
| 3 | Эффективность стрельбы вдогон одной ЗУР | 0,22–0,25 |
| 4 | Масса комплекса в боевом положении, кг | 15 |
| 5 | Масса ЗУР, кг | 9,15 |
| 6 | Масса боевой части, кг | 1,17 |

Рис. 3. ПЗРК 9К34 «Стрела-3»

Рис. 4. ПЗРК 9К310 «Игла-1»
Средства воздушного нападения продолжали развиваться, развивались и средства борьбы с ними. Следующим этапом в совершенствовании ПЗРК был этап создания переносных зенитных ракетных комплексов «Стрела-3» и «Игла-1».
В этих комплексах был применён новый наземный блок питания, включающий в себя сам источник питания и баллон с газом, новая более чувствительная ГСН с охлаждаемым фотоприёмником, новая двигательная установка, после чего существенно увеличилась вероятность поражения, помехозащищённость, скорость поражаемых воздушных целей, скорость полёта самой ракеты.
Самое главное, что эти комплексы получили возможность вести стрельбу не только на догонных, но и на встречных курсах.
Таблица 3
Основные тактико-технические характеристики
| Комплекс | Стрела-3 | Игла-1 | |
|---|---|---|---|
| 1 | Калибр ракеты, мм | 72 | 72 |
| 2 | Длина ракеты, мм | 1427 | 1427 |
| 3 | Зона поражения по дальности, м | 500–4000 | 500–5000 |
| 4 | Зона поражения по высоте, м | 30–2700 | 10–3500 |
| 5 | Вероятность поражения истребителя одной ЗУР | 0,3–0,33 | 0,4 |
| 6 | Максимальная скорость поражаемых целей, м/с (навстречу/вдогон) | 260/310 | 300/360 |
| 7 | Скорость полёта ЗУР, м/с | 470 | 560 |
| 8 | Масса ракеты, кг | 10,3 | 10,8 |
| 9 | Масса боевой части, кг | 1,17 | 1,27 |
| 10 | Масса пускового устройства, кг | 2,95 | 3 |
| 11 | Масса ПРП 9С13, кг | 2,5 | 2,5 |
| 12 | Масса НРЗ, кг | 2,3 | 2,3 |
| 13 | Масса комплекса в боевом положении, кг | 16 | 18,2 |
| 14 | Время подготовки к пуску ракеты, с | 10 | 13 |
Комплексом нового — третьего — поколения до сих пор считается переносной зенитный ракетный комплекс 9К38 «Игла».
1.1. Общие сведения о ПЗРК 9К38 «Игла»
Переносной зенитный ракетный комплекс 9К38 «Игла» является средством непосредственного прикрытия войск и объектов от ударов средств воздушного нападения (СВН) противника. Он состоит на вооружении зенитных отделений, зенитных ракетных взводов и батарей, входящих в состав зенитных дивизионов, а также других подразделений родов войск видов Вооружённых Сил РФ с 1983 г.

Рис. 5. ПЗРК 9К38 «Игла»
Комплекс предназначен для поражения реактивных, турбовинтовых и винтомоторных самолётов, а также вертолётов на встречных и догонных курсах в условиях естественных (фоновых) и искусственных тепловых помех при визуальной видимости цели.
Таблица 4
Тактико-технические характеристики
| 1 | Максимальная высота поражаемых целей на встречных/догонных курсах, м: | |
|---|---|---|
| реактивные самолёты | 2000/2500 | |
| поршневые самолёты и вертолёты | 3000/3500 | |
| 2 | Минимальная высота поражаемых целей, м | 10 |
| 3 | Максимальный параметр поражаемых целей на встречных/догонных курсах, м: | |
| реактивные самолёты | 2000/2500 | |
| поршневые самолёты и вертолёты | 2500/3000 | |
| 4 | Скорость поражаемых целей на встречных/догонных курсах, м/с | 360/320 |
| 5 | Наклонная дальность поражения, м | от 500 до 5000 |
| 6 | Время перевода из походного положения в боевое, с | не более 13 |
| 7 | Время готовности к пуску (после выхода на режим наземного источника питания), с | не более 5 |
| 8 | Диапазон рабочих температур, °С | от –44 до +50 |
Состав комплекса
1. Боевые средства
• Зенитная управляемая ракета 9М39 представляет собой реактивный летательный аппарат, снабжённый двухступенчатой твёрдотопливной двигательной установкой, бортовой аппаратурой управления полётом по методу пропорционального сближения за счёт пассивного оптического самонаведения и боевой частью с контактным взрывателем.

Рис. 6. ЗУР 9М39
• Пусковая труба 9П39 (9П39-1) обеспечивает прицельный и безопасный пуск ракеты, а также является направляющим устройством при пуске и одновременно служит контейнером при эксплуатации ракеты.

Рис. 7. Пусковая труба 9П39
• Наземный источник питания 9Б238 (одноразового действия) предназначен для снабжения хладагентом ОГС и обеспечения электроэнергией комплекса в период подготовки к пуску ракеты.
Рис. 8. НИП 9Б238
• Пусковой механизм 9П516-1 (без НРЗ-9П516) предназначен для подготовки к пуску и пуска ракеты по выбранной цели для обстрела. Обеспечивает звуковую сигнализацию качества захвата цели и её принадлежности, а также исключает обстрел цели с принадлежностью «свой» при использовании НРЗ 1Л-14.
Рис. 9. Пусковой механизм 9П516-1
2. Средства приёма целеуказания и связи
• Переносной электронный планшет 1Л15-1 обеспечивает своевременное оповещение стрелка-зенитчика о месте нахождения и направлении движения воздушных целей (от 1 до 4), индикацию траектории перемещения и принадлежности целей в радиусе 12,5 км. Информацию о целях в виде кодограммы ПЭП получает на встроенный радиоприёмник с батарейного командного пункта (БКП) или командного пункта (КП) зенитного дивизиона.

Рис. 10. ПЭП 1Л15-1
• Радиостанция Р-157 обеспечивает приём оповещения о воздушной обстановке и управление огнём стрелков-зенитчиков. Вместо указанных средств связи могут использоваться переносные аналоги.

Рис. 11. Радиостанция Р-157
3. Средства технического обслуживания
• Подвижный контрольный пункт ПКП 9В866 и контрольно-проверочная аппаратура 9Ф719 служат для проведения технического обслуживания и регламентных работ боевых средств комплекса в полевых условиях и на базах (арсеналах).



Рис. 12. ПКП 9В866 с КПА 9Ф719
4. Учебно-тренировочные средства
• Унифицированный полевой тренажер 9Ф635 предназначен для обучения и комплексных тренировок одного, двух или трёх стрелков-зенитчиков боевой работе и стрельбе по имитированным и реальным воздушным целям в реальной фоновой обстановке с обеспечением объективного контроля действий обучаемых.
• Учебно-тренировочный комплект 9Ф663 предназначен для психофизиологической подготовки одного или двух стрелков-зенитчиков и выполнения учебно-тренировочных задач на месте и в движении. Обеспечивает имитацию пуска ракеты (болванки) на безопасной площадке.
• Учебно-разрезной макет 9К38УР предназначен для изучения устройства боевых средств комплекса.

Рис. 13. Унифицированный полевой тренажёр 9Ф635

Рис. 14. Учебно-тренировочный комплект 9Ф663

Рис. 15. Учебно-разрезной макет 9К38УР
Рис. 16. Габаритно-весовой макет 9К38 ГВМ
• Габаритно-весовой макет 9К38 ГВМ предназначен для обучения и тренировки стрелков-зенитчиков выполнению правил обращения с боевым комплексом, а также выполнению нормативов боевой работы.
• Комплект электрифицированных стендов 2У438 предназначен для изучения устройства боевых средств комплекса, режимов работы и взаимодействия составных частей, а также правил стрельбы и боевой работы.
Принцип работы комплекса
При поступлении команды «К бою!» или самостоятельно после визуального обнаружения цели стрелок-зенитчик занимает стартовую позицию, принимает удобное для стрельбы боевое положение и изготавливается к стрельбе. Определив исходные данные для стрельбы и момент пуска ракеты, он приводит в действие НИП.
После производства накола НИП сжатый газ поступает в фотоприёмник ракеты для охлаждения оптической головки самонаведения. Одновременно срабатывает батарея электропитания, и напряжение с неё поступает в электронные блоки пускового механизма, ракеты и пусковой трубы. Ротор гироскопа ОГС ракеты разгоняется за 5 с до100 об/с и арретируется (электрически стопорится), т. е. происходит согласование оптической оси ОГС ракеты с осью прицела пусковой трубы.
Если стрелок точно сопровождает цель через механический прицел пусковой трубы, а сигнал цели мощнее сигнала фона и помех, то возможно проведение пуска ракеты в одном из двух режимов («Автомат» или «Ручной») путём нажатия на пусковой крючок пускового механизма.
После срабатывания стартового двигателя ЗУР вылетает из пусковой трубы со скоростью до 28 м/с и угловой скоростью вращения до 20 об/с. После удаления ЗУР на безопасное для стрелка-зенитчика расстояние (не менее 5,5 м) срабатывает маршевый двигатель ЗУР, который разгоняет её до скорости 570 м/с и поддерживает эту скорость в полёте. Дальнейшее вращение ракеты на траектории полёта обеспечивается за счёт повёрнутых относительно продольной оси ракеты крыльев и дестабилизаторов.
В момент вылета ЗУР из трубы происходит раскрытие рулей и срабатывание порохового управляющего двигателя, который осуществляет разворот ракеты на начальном участке траектории по командам ОГС. Снимается первая ступень предохранения, а через 1–1,9 с и вторая, после чего боевая часть готова к действию.
В процессе слежения за целью ОГС формирует суммарный командный сигнал, который поступает в рулевой отсек ракеты на рулевые машины и обеспечивает управление ЗУР в полёте.
При попадании ракеты в цель срабатывает взрыватель боевой части, который подрывает боевую часть, а взрывной генератор подрывает остатки топлива двигательной установки.
В случае непопадания ракеты в цель по истечении 14–17 с происходит самоликвидация ЗУР.
Наведение ракеты на цель осуществляется по методу пропорционального сближения, при котором управляющий сигнал пропорционален абсолютной угловой скорости вращения линии визирования ракета-цель. Сущность метода заключается в том, чтобы свести к нулю угловую скорость линии визирования, что обеспечит встречу ракеты с целью в упреждённой точке.
Система управления полётом предназначена для реализации выбранного метода наведения ракеты на цель. В качестве измерителя угловой скорости линии визирования используется одноканальная гироскопическая головка самонаведения. В основу построения бортовой аппаратуры заложен принцип одноканального управления вращающейся ракетой с работающими в релейном режиме рулями, позволяющими, используя вращение ракеты, создавать управляющую силу в любом направлении пространства.
На начальном участке траектории ракета летит не в упрежденную точку, а угловая скорость линии визирования не равна нулю. Оптическая головка самонаведения измеряет эту угловую скорость и пропорционально её величине формирует команду управления, исполняя которую, рули рулевого отсека создают управляющую силу в нужном направлении пространства.
Под действием управляющей силы ракета разворачивается относительно центра масс. Появляющиеся при этом углы атаки и скольжение создают результирующую подъёмную силу, которая изменяет траекторию полёта ракеты таким образом, чтобы свести к нулю угловую скорость линии визирования.
Метод пропорционального сближения обеспечивает попадание ракеты вблизи наиболее теплоконтрастных элементов конструкции цели. При пусках ракет по реактивным самолётам центр попаданий лежит в районе среза сопла двигателя. Однако, конструкция современных самолётов такова, что район среза сопла является малоуязвимой областью для ракеты с боевой частью малой мощности. Для повышения эффективности поражения в ракете предусмотрена схема смещения центра группирования попаданий в направлении полёта самолёта, т. е. в его корпус. Схема смещения вырабатывает дополнительный сигнал, который обеспечивает отклонение ракеты от среза сопла в корпус.
1.2. Устройство и функционирование боевых средств
1.2.1. Зенитная управляемая ракета 9М39
Зенитная управляемая ракета 9М39 является боевым средством ПЗРК 9К38. Она представляет собой боевой реактивный беспилотный управляемый крылатый летательный аппарат, предназначенный для поражения реактивных, турбовинтовых, винтомоторных самолётов и вертолётов в ближней зоне на встречных и догонных курсах в условиях естественных и искусственных тепловых помех при визуальной видимости цели.
При построении ЗУР использованы:
1) планер, выполненный по аэродинамической схеме «утка» с вращающимся вокруг продольной оси корпусом ракеты и одноканальным релейным управлением: аэро— и газодинамическим на участке разгона и аэродинамическим на маршевом участке;
2) двухступенчатая тандемная твёрдотопливная двигательная установка;
3) одноканальная пассивная оптическая тепловая гироскопическая система самонаведения по методу пропорционального сближения;
4) боевая часть осколочно-фугасного действия с контактным взрывателем;
5) бортовой источник энергии на основе порохового аккумулятора давления.
Рис. 17. Отсеки ракеты
Конструктивно ракета 9М39 состоит из скрепленных между собой отсеков (рис. 17):
• В отсеке ОГС размещены три основные системы: координатор цели, следящая система координатора и автопилот (формирователь сигнала управления рулями — ФСУР).
• В рулевом отсеке размещены: рулевая машина с рулями, дестабилизаторы, датчик угловой скорости с усилителем, бортовой источник питания (БИП), пороховой аккумулятор давления (ПАД), пороховой управляющий двигатель (ПУД).
• В отсеке боевой части размещены собственно боевая часть, контактный взрыватель, взрывной генератор и провода электрической связи с БИП.
• В отсеке двигательной установки последовательно расположены двухрежимный маршевый двигатель и стартовый двигатель. С наружной стороны на сопловой блок установлены крылья.
Таблица 5
Основные тактико-технические характеристики ракеты
| 1 | Калибр, мм | 72,2 |
| 2 | Длина, мм | 1639 |
| 3 | Масса, кг | 10,6 |
| 4 | Масса боевой части, кг | 1,27 |
| 5 | Угол зрения ОГС, град. | 2 |
| 6 | Угол пеленга ОГС, град. | ±38 |
| 7 | Скорость выброса из трубы, м/с | 28–30 |
| 8 | Скорость полёта на марше, м/с | 340–570 |
| 9 | Скорость вращения относительно продольной оси, об/с | 12–20 |
| 10 | Располагаемые перегрузки до | 10,2 |
| 11 | Время готовности к пуску, с до | 5 |
| 12 | Диапазон рабочих температур, °С | от –44 до +50 |
Планер
Планер ракеты 9М39 предназначен для решения следующих задач:
1) создания управляющей силы, изменяющей направление полёта;
2) гашения колебаний корпуса, возникающих при управлении;
3) стабилизации ракеты в направлении полёта;
4) поддержания скорости вращения ракеты в полёте;
5) создания подъёмной силы;
6) размещения бортовой аппаратуры.
Планер выполнен по аэродинамической схеме «утка» и состоит из:
• носового обтекателя с аэродинамическим насадком;
• корпуса;
• рулей;
• дестабилизаторов;
• крыльев.
Носовой обтекатель с аэродинамическим насадком предназначен для снижения лобового аэродинамического сопротивления ракеты и пропускания лучистой энергии от цели с минимальными потерями. Обтекатель выполнен из специального стекла в виде мениска. Металлический насадок, кроме снижения сопротивления, ещё и уменьшает нагрев обтекателя.
Корпус планера предназначен для создания подъёмной силы и размещения бортовой аппаратуры. Как уже отмечено, корпус состоит из скрепленных между собой цилиндрических отсеков.
Рули предназначены для создания управляющей силы, изменяющей направление полёта, и гашения колебаний корпуса, возникающих при управлении. Они представляют собой пару аэродинамических пластин из прочной стали. Их форма обеспечивает оптимальное обтекание конструкции сверхзвуковым воздушным потоком и создание управляющей силы требуемой величины. Когда ракета находится в пусковой трубе, рули сложены в отверстия в корпусе рулевого отсека и размыкают цепи блока взведения взрывателя. После выхода вращающейся ракеты из трубы рули под действием центробежных сил и пружин стопоров раскрываются, надёжно фиксируются в рабочем положении и коммутируют цепи питания взрывателя и порохового управляющего двигателя (ПУД).
При одноканальном управлении вращающейся ракетой для создания управляющей силы в любом направлении полёта рули перебрасываются рулевой машиной из одного крайнего положения в другое (на ±15°) 4 раза за один оборот вращения ракеты. Для этого ОГС, определяя ошибку наведения ракеты, формирует релейный сигнал управления рулевой машиной, задающий время нахождения рулей в каждом из 4 крайних положений.
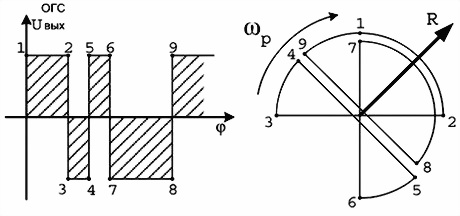
Рис. 18. Создание результирующей аэродинамической силы R в соответствии с управляющим сигналом
Так как на участке разгона ракеты эффективность рулей недостаточна, то предусматривается параллельное газодинамическое управление с помощью двух сопел, расположенных в плоскости, перпендикулярной плоскости рулей, но по разные стороны корпуса. Реактивную силу создают пороховые газы ПУД, истекающие через то или другое сопло. Коммутация сопел осуществляется той же рулевой машиной синхронно с перебросом рулей.
Дестабилизаторы расположены в плоскости, перпендикулярной плоскости рулей, и имеют аналогичную им форму, но меньших размеров, складываются в углубления в корпусе и неподвижны после раскрытия. Они предназначены для оптимизации соотношения устойчивости и управляемости (располагаемых перегрузок) ракеты путём выбора положения центра давления относительно центра масс и поддержания вращения ракеты из-за их разворота относительно продольной оси.
Крылья выполнены в виде крыльевого блока, закрепленного на корпусе сопла маршевого двигателя по схеме «Х-+» относительно рулей. Крыльевой блок предназначен для стабилизации ракеты в направлении полёта, поддержания скорости вращения ракеты и создания подъёмной силы при наличии углов атаки.
Крыльевой блок состоит из корпуса, четырех складывающихся крыльев и механизма их стопорения. Корпус из алюминиевого сплава имеет:
1) отверстия для крепления блока;
2) 4 выступа для крепления стартового двигателя с помощью разжимного кольца;
3) 4 отверстия для установки механизма стопорения;
4) 4 отверстия для установки осей складывания крыльев.
До выхода ракеты из трубы крылья сложены против часовой стрелки. При выходе из трубы крылья под действием центробежных сил раскрываются и надёжно фиксируются механизмом стопорения.
Оптическая головка самонаведения
Оптическая головка самонаведения 9Э410 предназначена для формирования сигнала управления, обеспечивающего пассивное самонаведение ракеты по методу пропорционального сближения.
ОГС представляет собой оптическое приёмное устройство и решает следующие задачи:
1) пространственная селекция целей;
2) спектральная селекция инфракрасного излучения поражаемых целей, ложных тепловых целей (ЛТЦ), фоновых помех и защита от них;
3) преобразование инфракрасного излучения выбранной для обстрела цели в электрический сигнал ошибки слежения, пропорциональный пространственному рассогласованию оптической оси ОГС и линии визирования «ракета — цель»;
4) захват и автоматическое сопровождение цели оптической осью (сведение ошибки слежения к нулю);
5) формирование сигнала управления ракетой, пропорционального угловой скорости линии визирования (по методу пропорционального сближения).
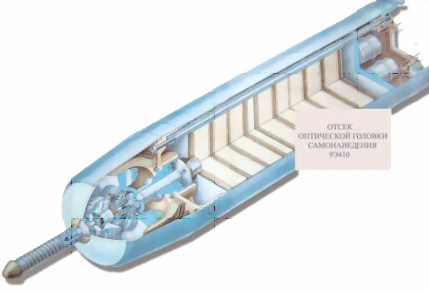
Рис. 19. Отсек ОГС 9Э410
Решение задачи пространственной селекции целей осуществляется созданием узкого поля зрения ОГС (2°) за счёт применения зеркально-линзовой оптической системы (объектива). Однако узкое поле зрения потребует точного прицеливания и принудительного совмещения оптической оси объектива с линией прицеливания.
Для пространственной селекции оптического излучения объектов выбор угла поля зрения носит характер оптимизации: при очень малом угле затрудняется наведение и сопровождение, а при большом — повышается объём информации, в том числе ложной. Величина угла зависит от отношения фокусного расстояния и диаметра кадра объектива.
Задача спектральной селекции инфракрасного излучения поражаемых целей, ложных тепловых целей (ЛТЦ), фоновых помех и защита от них решается путём избирательного двухканального приёма инфракрасного излучения поражаемых целей и помех.
Физическими основами пассивной оптической локации является то, что все тела, температура которых выше абсолютного нуля, излучают электромагнитные волны в оптическом диапазоне. Оптический диапазон лежит между радио— и рентгеновским излучением и включает в себя:
• инфракрасное излучение с длиной волны ? = 1000–0,78 мкм;
• видимое излучение — ? = 0,78–0,4 мкм;
• ультрафиолетовое излучение — ? = 0,4–0,001 мкм.
При этом также известно, что:
• максимум спектральной интенсивности излучения Солнца, его фоновых отражений достигается при ? = 1 мкм, а ложных тепловых целей (ЛТЦ) — при ? = 2 мкм;
• нагретые элементы сопел реактивных двигателей и выхлопных патрубков поршневых двигателей, а также их выхлопные газовые струи имеют инфракрасное (тепловое) излучение в узком диапазоне длин волн 2,6–6,5 мкм.
При построении приёмных устройств для инфракрасного излучения в объективах создаются входные оптические полосовые фильтры, которые, в принципе, могут быть созданы различными методами: интерференцией, избирательным поглощением, избирательным отражением, избирательным преломлением и поляризацией.
Использование в приёмниках оптических фильтров позволяет:
• выделить из всего потока лучистой энергии только инфракрасное излучение целей и помех;
• образовать в приемном устройстве два спектральных канала: основной (ОК) — поражаемых целей и вспомогательный (ВК) — помех.
Сравнение уровней сигналов в ОК и ВК позволяет выстроить логику селекции и защиты:
ВК/ОК < 1 — цель; ВК/ОК ? 1 — фон; ВК/ОК > 1 — ЛТЦ.
Задача преобразования инфракрасного излучения выбранной для обстрела цели в электрический сигнал ошибки слежения, пропорциональный пространственному рассогласованию оптической оси ОГС и линии визирования «ракета — цель» решается следующим образом:
• Оптическая система формирует в фокальной плоскости изображение цели в виде пятна малых размеров (положение пятна в фокальной плоскости однозначно характеризует направление (?) и величину угла (А) рассогласования оптической оси и линии визирования, т. е. ошибку слежения).
• Модулятор приемного устройства, расположенный в фокальной плоскости, производит сканирование положения пятна и модуляцию потока лучистой энергии по закону ошибки слежения. В качестве модуляторов нашли применение вращающиеся диски — растры с чередующимися прозрачными и непрозрачными участками.
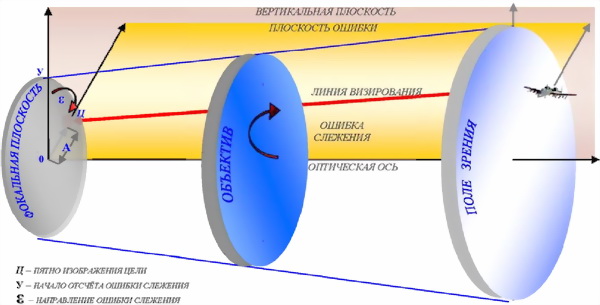
Рис. 20. Принцип формирования изображения цели и ошибки слежения
• Фотодетекторы приёмного устройства преобразовывают модулированный лучистый поток в пропорциональный электрический сигнал ошибки слежения. В качестве детекторов наибольшее применение нашли фоторезисторы — полупроводниковые приборы, не содержащие p — n перехода. В них при поглощении фотонов генерируются электронно-дырочные пары, создающие, при приложении внешнего электрического поля ток в рабочей цепи. Подбором материала и температуры фоторезистора можно обеспечить требуемый диапазон его спектральной чувствительности.
Для обеспечения захвата и автоматического сопровождения выбранной для обстрела цели необходимо:
1. Принудительно совместить (арретировать) оптическую ось ОГС с линией прицеливания пусковой трубы (реализуется автоматически при выдаче питания от наземного источника).
2. Прицелиться (совместить линию прицеливания с направлением на цель).
3. Для перехода на автоматическое сопровождение нажать на пусковой крючок (до положения «РР» — разрешение разарретирования). При этом следящая система разарретируется и начинает работать. Задающим воздействием для следящей системы является сигнал ошибки слежения, а в качестве исполнительного элемента используется свободный гироскоп, на роторе которого и закреплён объектив. Под действием электромагнитного момента внешних сил, создаваемого следящей системой, ротор гироскопа прецессирует в сторону уменьшения ошибки слежения, причем с угловой скоростью, пропорциональной ошибке слежения.
Формирование сигнала управления ракетой по методу пропорционального сближения осуществляет автопилот. Он представляет собой одноканальную систему автоматического регулирования и структурно состоит из формирователя сигнала управления рулями (ФСУР) и рулевой машины (РМ).
Объектом управления автопилота являются рули планера ракеты. С помощью планера изменяется положение ракеты относительно цели (т. е. изменяется положение линии визирования «ракета — цель»).
При управлении полётом по методу пропорционального сближения ракета наводится не на цель, а в некоторую упрежденную точку встречи (УТВ) по условию равенства нулю угловой скорости поворота линии визирования, т. е. наличие угловой скорости линии визирования свидетельствует об ошибке наведения, которую автопилот должен свести к нулю.
Измерителем угловой скорости линии визирования является гироскопический следящий координатор, сопровождающий цель. При этом информация об угловой скорости линии визирования содержится в сигнале ошибки слежения, поэтому он подается на автопилот как сигнал ошибки наведения.
Для решения этих задач ОГС имеет следующую структуру и состав:
I. Следящий координатор цели (СКЦ):
1. Свободный гироскоп:
а) статор:
• катушки вращения (КВ);
• катушки коррекции (КК);
• катушки генератора опорных напряжений (ГОН);
• катушки пеленга (П);
б) ротор:
• карданов подвес;
• постоянный магнит;
• координатор;
• оптическая система (О);
• фотоприёмники основного и вспомогательного каналов (ФПок, ФПвк);
2. Системы автоматического управления:
а) следящая система арретирования и коррекции ротора гироскопа (СС);
б) система стабилизации оборотов ротора гироскопа (ССО).
II. Автопилот:
1. Формирователь сигнала управления рулями (ФСУР).
2. Газовая рулевая машина (и пороховой управляющий двигатель).
УСТРОЙСТВО И РАБОТА ОГС
Оптическая система
Оптическая система предназначена для избирательного приёма инфракрасного излучения поражаемых целей и помех и фокусировки его в фокальных плоскостях основного и вспомогательного спектральных каналов координатора.
В ОГС 9Э410 применена зеркально-линзовая оптическая система, состоящая из следующих элементов:
1) обтекатель;
2) главное зеркало;
3) корригирующая линза;
4) контрзеркало;
5) спектроразделительный фильтр.
Все элементы оптической системы, за исключением обтекателя, размещены на валу ротора гироскопа и образуют объектив, имеющий шесть степеней свободы:
• вращение относительно 3 осей связанной системы координат (начало координат — в точке карданного подвеса ротора):
— вкруговую по крену (относительно оптической оси);
— на углы ±38° по тангажу и рысканию (углы пеленга цели);
• перемещение вместе с ракетой по 3 осям земной системы координат.
Фокусное расстояние (F) такого объектива равно пути оптического потока от зеркала до фоторезистора, расположенного в фокальной плоскости.
Угол зрения объектива (?) равен отношению диаметра фотосопротивления (d) к фокусному расстоянию:
? = d/F, град.
Телесный угол поля зрения ? ? ?2, стерадиан.

Рис. 21. Прохождение оптических сигналов цели и помехи в объективе ОГС:
1 — обтекатель; 2 — контрзеркало; 3 — фоторезистор ВК; 4 — фоторезистор ОК; 5 — корригирующая линза; 6 — спектроразделительный фильтр; 7 — главное зеркало-магнит
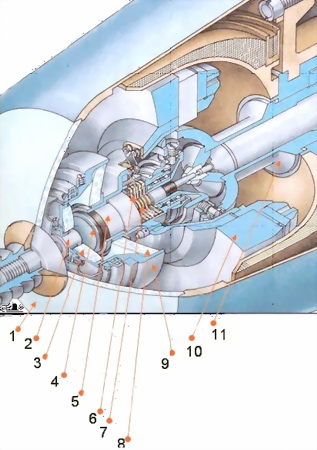
Рис. 22. Устройство оптической системы ОГС:
1 — обтекатель; 2 — фотоприемник ВК; 3 — контрзеркало; 4 — спектрораздельный фильтр; 5 — фотоприемник ОК; 6 — обойма; 7 — коллектор; 8 — корригирующая линза; 9 — бленда; 10 — главное зеркало; 11 — карданов подвес
1. Обтекатель, как оптический компонент, является слабой отрицательной (рассеивающей) линзой. Он выполнен в виде мениска, ограниченного двумя сферическими поверхностями, из ИК-прозрачного материала с высокой излучательностью, теплопроводностью и теплоёмкостью.
2. Главное зеркало образовано сферической поверхностью торца магнита ротора гироскопа. В качестве отражательного слоя используется пленка серебра.
3. Корригирующая линза — афокальная линза (с фокусом в бесконечность) выполняет функцию коррекции искажений оптического потока (возникающих из-за неточностей изготовления линз и немонохромности потока).
4. Контрзеркало — фокусирующий элемент с отражающей плёнкой серебра.
5. Спектроразделительный фильтр — оптический компонент, выполненный из специального стекла, прозрачного для излучения с ? = 2,6–6,5 мкм и отражающего сигналы с ? = 0,46–4 мкм.
Таким образом, инфракрасное излучение истинных и ложных целей, попавших в узкое поле зрения объектива, слабо рассевается обтекателем, обеспечивая засветку рабочей поверхности главного зеркала при наличии ошибки слежения (при отсутствии ошибки излучение экранируется корпусом бленды объектива).
Отразившись от главного зеркала, оптический поток проходит через корригирующую линзу на контрзеркало. Коррекцией устраняются отклонения потока от заданного направления (погрешности изображения — аберрации).
Отразившись от контрзеркала, оптический поток направляется на спектроразделительный фильтр. Благодаря фильтру инфракрасное излучение истинной цели фокусируется в пятно диаметром 1 мм в фокальной плоскости основного спектрального канала, а инфракрасное излучение ложных тепловых целей (ЛТЦ) и помех фокусируется в фокальной плоскости вспомогательного спектрального канала.
Важно, что положение пятна в фокальной плоскости однозначно характеризует направление и величину рассогласования между оптической осью объектива и линией визирования «ракета — цель» (т. е. определяет ошибку слежения).
Фотоприёмник
Фотоприёмник координатора ОГС 9Э410 предназначен для преобразования информации об ошибке слежения, заложенной в положении теплового пятна в фокальной плоскости объектива, в электрический сигнал.
Он представляет собой двухканальный оптический детектор, имеющий:
• основной канал с охлаждаемым фоторезистором для сигналов поражаемых целей;
• вспомогательный канал для сигналов помех.
Каждый канал фотоприемника состоит:
1) из модулятора;
2) фоторезистора (в ОК — с системой охлаждения);
3) предварительного усилителя;
4) схемы автоматической регулировки усиления.
Все элементы фотоприёмника также размещены на валу ротора гироскопа и вращаются с ним относительно статора с частотой f2 = 100 Гц — до пуска и f2 + f3 = 112–120 Гц — в полёте, обеспечивая стабильную частоту сканирования цели fск = 100 Гц.
1. Модулятор представляет собой непрозрачную маску с прямоугольным окном, нанесенную на фоточувствительный слой фоторезистора. При такой форме растра модулятора реализуется импульсный метод модуляции теплового потока. Период повторения тепловых импульсов будет равен T = 1/fск = 0,01 c, а за начало отсчета периода принимается связанная ось ОгУг (направленная вертикально вверх).
При этом информация об ошибке слежения содержится:
• во временном положении импульса в периоде сканирования (?н) как направление ошибки слежения (?);
• в длительности импульса (?и) как величина ошибки слежения (??). Очевидно, что чем дальше тепловое пятно от центра диска, тем больше линейная скорость пересечения им окна, тем меньше длительность импульса.
? = S/2?Rn ? Tск,
где S — ширина окна; Rп — расстояние от центра диска до пятна; Тск — период сканирования.
Рис. 23. Формирование сигнала ошибки слежения в зависимости от положения пятна

Рис. 24. Чувствительность фоторезисторов основного и вспомогательного каналов
Рис. 25. Устройство фоторезистора основного канала
2. Фоторезистор — полупроводник, обладающий свойством фотопроводимости, т. е. способностью генерировать электронно-дырочные пары при поглощении тепловых фотонов. Спектральная чувствительность фоторезистора определяется материалом и температурой полупроводника.
В качестве фоторезистора основного канала используется монокристалл антимонида индия, охлажденный до температуры 77 К (–196 °C) для повышения спектральной чувствительности в области 5 мкм.
Система охлаждения фоторезистора основного канала работает по принципу дросселирования сжатого газообразного азота до перехода его в жидкую фазу с tкип=–196 °C. В качестве источника азота, сжатого до 350 атм, используется баллон наземного источника питания. При нахождении ракеты в пусковой трубе баллон газопроводом соединяется с микрохолодильником «брызгающего» типа.
Жидкий азот с выхода микрохолодильника омывает основание фоторезистора и пропитывает набивку накопителя жидкого азота, обеспечивая требуемую температуру фоторезистора в течение заданного времени.
Под действием тепловых импульсов цели в рабочей цепи фоторезистора будет протекать импульсный ток, т. е. произойдет детектирование модулированного теплового потока — преобразование ошибки слежения в синхронный электрический сигнал.

Рис. 26. Получение импульсов тока в цепи фоторезистора
Во вспомогательном канале используется неохлажденный фоторезистор на основе сернистого свинца, чувствительный к излучению ложных тепловых целей с максимумом 2–3 мкм.
3. Предварительный усилитель представляет собой широкополосный усилитель низкой частоты, позволяющий:
• усилить информационный сигнал до уровня надёжной работы последующих устройств;
• преобразовать сигнал ошибки слежения из импульсной формы (видеосигнал постоянного тока с бесконечным спектром частот) в сигнал переменного тока со значительно сокращенным диапазоном частот.
Выходной сигнал предварительно го усилителя имеет сложную форму и содержит в себе множество гармонических колебаний, в том числе и первую гармонику частоты сканирования, которая в дальнейшем используется в качестве информационного сигнала об ошибке слежения за целью.
Для выделения первой гармоники и применяют последовательное сокращение диапазона частот сигнала ошибки слежения с помощью предварительного усилителя, избирательного усилителя, амплитудного детектора, усилителя коррекции СКЦ.

Рис. 27. Спектральное преобразование сигнала ошибки слежения
4. Схема автоматической регулировки усиления представляет собой отрицательную обратную связь, изменяющую коэффициент усиления предварительных усилителей и тем самым стабилизирующую параметры сигнала ошибки при изменении мощности принимаемого излучения.
Таким образом, тепловое излучение цели и помех, сфокусированное объективом, проецируется в виде пятен малого размера на диски модуляторов соответственно основного и вспомогательного каналов фотоприёмника.
Благодаря тому, что диски модуляторов размещены в фокальных плоскостях объектива и ось их вращения совпадает с его оптической осью, положение пятна на диске однозначно характеризует угловое рассогласование между линией визирования и оптической осью объектива, т. е. ошибку слежения координатора. Благодаря вращению и специальной форме прозрачного окна дисков происходит круговое сканирование положения цели (и ЛТЦ) в пределах поля зрения ОГС и преобразование информации об ошибке слежения из пространственного вида в импульсную модуляцию теплового потока.
Охлаждаемый фоторезистор основного канала преобразует модулированный тепловой поток цели в синхронный импульсный электрический сигнал постоянного тока. Причем в длительности импульса содержится информация о величине, а во временном положении импульса в периоде сканирования — о направлении ошибки слежения за целью.
Предварительный усилитель преобразует сигнал постоянного тока в цепи фоторезистора в сигнал переменного тока, содержащий в себе первую гармонику частоты сканирования. Амплитуда сигнала частоты сканирования несёт информацию о величине, а фаза — о направлении ошибки слежения.
Охлаждение фоторезистора до температуры –196 °C позволяет не только задать спектральный диапазон излучения поражаемых целей, но и значительно повысить чувствительность фотоприёмника на фоне тепловых помех. Охлаждающее устройство фоторезистора основного канала дросселирует сжатый до 350 атм азот, хранящийся в баллоне наземного источника питания. При понижении давления азот переходит в жидкое состояние с температурой –196 °C (77 К), охлаждает фоторезистор и накапливается в специальном корпусе с набивкой. Охлаждающее устройство обеспечивает достижение заданной температуры фоторезистора за 4,5 с перед пуском и подержание её в течение 14 с после пуска.
Неохлаждаемый фоторезистор вспомогательного канала чувствителен к тепловому излучению ложных тепловых целей (ЛТЦ) и аналогично преобразует его в электрический сигнал.
Повышению качества сигнала ошибки слежения, а в целом и наведения ракеты на цель способствует и автоматическая регулировка усиления, работающая по сигналу предварительного ПУок. Сигнал ошибки слежения за целью с выхода фотоприемника основного канала поступает на схему переключения и схему ближней зоны электронного блока ОГС. Сигнал ЛТЦ с выхода фотоприемника вспомогательного канала поступает на схему переключения.
Следящая система координатора цели
Следящая система предназначена для автоматического слежения координатора за целью и на основе этого определения угловой скорости линии визирования, необходимой для реализации метода пропорционального сближения при наведении ракеты в упрежденную точку встречи с целью.
Для этого следящая система решает следующие задачи:
1. Непрерывно автоматически совмещает оптическую ось координатора (ХК) с линией визирования цели (ХВ), т. е. сводит ошибку слежения координатора к нулю (?? ? 0).

Рис. 28. К работе следящей системы координатора цели
2. При ?? ? 0 появляется возможность измерения угловой скорости виртуальной линии визирования (d?в/dt) как угловой скорости поворота самого координатора (d?к/dt), т. е. d?в/dt = d?к/dt.
3. При использовании гироскопического привода координатора угловая скорость его прецессии (поворота координатора) пропорциональна величине внешнего управляющего момента, а последний пропорционален ошибке слежения, т. е. d?в/dt ? ??.
4. При реализации метода пропорционального сближения за параметр управления (ошибку наведения ??(t)) принимается d?в/dt, а система наведения ракеты на цель будет стремиться свести ошибку наведения к нулю путём изменения угла пеленга ?, т. е. ?? = ?(t) ? 0.
5. В системе наведения ракеты на цель следящий координатор является датчиком ошибки наведения, а автопилот — следящим приводом. Поэтому в качестве управляющего сигнала для автопилота используется сигнал ошибки слежения координатора, т. е. UВХАП = ??.
Структурно следящая система координатора построена по классической схеме, в которой с точки зрения автоматического управления:
1. Объектив одновременно выполняет роль датчика цели (положения линии визирования ?в) и датчика отрицательной обратной связи (положения оптической оси координатора ?к).
2. Фотоприёмник выполняет роль алгебраического сумматора, формирующего электрический сигнал рассогласования (ошибки слежения координатора ?? = ?в — ?к).
3. Электронный блок выполняет роль усилительно-преобразовательного тракта, формирующего электрические управляющие сигналы для исполнительного элемента следящей системы координатора (U??) и автопилота: Ud?в/dt. Причем U?? = U ? d?в/dt.
4. Статорные катушки коррекции гироскопа выполняют роль исполнительного элемента, создающего электромагнитный внешний момент ротора.
5. Ротор гироскопа является объектом управления следящей системы. Под действием внешнего момента он прецессирует в сторону уменьшения ошибки слежения.
6. Так как координатор цели механически связан с ротором гироскопа, то следящая система заставляет его непрерывно сопровождать цель оптической осью и на основе этого формирует сигнал угловой скорости линии визирования для автопилота.
Для обеспечения боевого применения ракеты следящий координатор имеет ещё две вспомогательные системы автоматического управления:
1. Система арретирования координатора предназначена для принудительного совмещения при прицеливании оптической оси координатора с линией прицеливания пусковой трубы, чем обеспечивается захват цели узким полем зрения ОГС. Причем линия прицеливания наклонена вниз на 10° относительно продольной оси пусковой трубы, что исключает удар ракеты о землю при старте.
Рис. 29. К работе системы арретирования координатора
Принцип работы этой системы основан на использовании катушки пеленга, размещенной на статоре гироскопа, и катушки заклона, размещенной в блоке датчиков пусковой трубы. Постоянный магнит ротора наводит в катушке пеленга синусоидальный сигнал, характеризующий направление (фазу) и величину (амплитуду) отклонения оптической оси от продольной оси ракеты (угол пеленга ?). Катушка заклона, включенная встречно с катушкой пеленга, формирует синусоидальный сигнал, характеризующий заданное отклонение линии прицеливания от продольной оси ракеты (–10°). Таким образом, разностный сигнал двух катушек значит ошибку арретирования оптической оси относительно линии прицеливания (?арр).
При прицеливании сигнал ошибки арретирования подается на вход следящей системы координатора и отрабатывается ею до ?арр = 0 (оптическая ось удерживается на линии прицеливания). При нажатии на спусковой крючок и загорании сигнальной лампочки захвата цели от следящей системы отключается сигнал ошибки арретирования, а подключается сигнал ошибки слежения координатора (??).
2. Система разгона и стабилизации оборотов ротора гироскопа предназначена для задания стабильной частоты сканирования цели f2 = 100 Гц.
Для этого система должна:
• до пуска ракеты разогнать ротор гироскопа до 100 оборотов в секунду относительно статора (корпуса ракеты) и поддерживать этот уровень;
• при пуске ракеты система и статор начинают вращаться со скоростью 12–20 об/с (f3 = 12–20 Гц) в противоположном вращению ротора направлении. Чтобы сохранить неизменной частоту сканирования относительно цели, система должна увеличить частоту вращения ротора относительно статора на f3 и стабилизировать ее на этом уровне.
Принцип работы этой системы основан на использовании катушек вращения (КВ), размещенных на статоре гироскопа. При разгоне автоматика последовательно запитывает катушки, и они создают вращающееся магнитное поле, увлекающее за собой ротор с постоянным магнитом. При стабилизации оборотов ротора система сравнивает заданную частоту вращения с фактической и формирует в катушках вращения управляющие сигналы тока определенной фазы и величины. Магнитное поле, создаваемое катушками, притормаживает или ускоряет вращение ротора.
Электронные элементы следящего координатора размещены в электронном блоке ОГС. К ним относятся:
1) следящая система:
• схема переключения;
• избирательный усилитель;
• амплитудный детектор;
• фазовращатель;
• усилитель коррекции;
• схема ближней зоны;
2) система стабилизации оборотов ротора:
• частотомер;
• усилитель.
Схема переключения предназначена для логической и временной селекции сигнала истинной цели, в том числе в условиях отстрела противником ЛТЦ с интервалом более 0,3 с и превышением мощности излучения ЛТЦ над мощностью излучения цели до 6 раз.
Логика работы этой схемы следующая:
• при отстреле ЛТЦ появляется мощный источник излучения, уходящий от цели;
• на выходе вспомогательного канала координатора появится электрический сигнал, в 7–8 раз превышающий по уровню сигнал на выходе основного канала;
• схема переключения сформирует пропускной строб (импульс), временное положение которого в периоде сканирования связано с временным положением импульса истинной цели;
• пропускной строб подключит выход фотоприёмника к следящей системе только на время прохождения импульса истинной цели и исключит перезахват ЛТЦ.
Избирательный усилитель и амплитудный детектор предназначены для выделения из сложного сигнала цели первой гармоники частоты сканирования, несущей в себе информацию об ошибке слежения.
Усилитель коррекции предназначен для качественного усиления по напряжению и мощности сигнала ошибки слежения на частоте сканирования и запитки им катушек коррекции гироскопа, входов автопилота и цепей пусковой трубы и пускового механизма.
Усилитель коррекции состоит из предварительного усилителя напряжения и усилителя мощности (тока).
Рис. 30. Логическая и временная селекция истинной цели
Предусилитель обеспечивает избирательное, качественное (без искажений) усиление сигналов в полосе пропускания 60–150 Гц, т. е. на частоте сканирования.
Для этого он имеет:
• активные RC-фильтры нижних и верхних частот, охваченные положительной обратной связью и задающие полосу пропускания;
• эмиттерные повторители, согласующие входное и выходное сопротивление усилителя;
• динамическую нагрузку, обеспечивающую температурную компенсацию;
• отрицательную обратную связь по постоянному и переменному току, обеспечивающую стабильность параметров усиления и улучшение синусоидальности выходного напряжения.
Схема ближней зоны предназначена для повышения надёжности сопровождения цели при малых расстояниях до неё. При этом увеличиваются интенсивность излучения и размеры пятна, что приводит к изменению параметров импульсов на выходе фотосопротивления.
Частотомер ССО предназначен для сравнения заданной и фактической частоты вращения ротора гироскопа (частоты сканирования) и выработки импульсного управляющего напряжения, фаза которого даёт направление, а амплитуда — величину подкрутки ротора.
Принцип работы частотомера следующий:
• постоянный магнит ротора гироскопа индуцирует в обмотках генератора опорного напряжения (ГОН) синусоидальную ЭДС, частота которой характеризует фактическую частоту вращения ротора;
• сигнал ГОН поступает в частотомер и преобразуется:
а) с помощью дифференцирующей цепи — в последовательность импульсов;
б) с помощью счётчика (накопителя) импульсов — в постоянное напряжение Uфакт, величина которого характеризует фактическую частоту вращения;
в) с помощью суммирующего усилителя — в разностный сигнал ±?U = Uфакт — Uзад, причем Uзад формируется схемой «ИЛИ» до пуска (нет вращения ракеты) соответствующим f2, а после пуска — соответствующим f2 + f3 (т. е. ±?U характеризует величину превышения или уменьшения скорости вращения ротора относительно заданной до пуска и после пуска);
г) с помощью электронного ключа, коммутируемого напряжением ГОН, постоянное напряжение ±?U преобразуется в импульсное управляющее напряжение Uупр, характеризующее необходимую величину подкрутки или торможения ротора.
Усилитель ССО предназначен для усиления управляющего сигнала по напряжению и току и запитки им катушек вращения гироскопа. Катушки вращения создадут магнитное поле, при взаимодействии которого с постоянным магнитом ротора будет поддерживаться заданная частота вращения.
Функционирование системы разгона и стабилизации оборотов ротора гироскопа
1. В исходном состоянии ротор гироскопа, а значит полюса постоянного магнита и создаваемый ими магнитный поток Фг, имеют случайную ориентацию.
2. При приведении в действие наземного источника питания электрическое питание выдаётся на блок датчиков пусковой трубы, электронный блок пускового механизма и ОГС ракеты.
3. В зависимости от ориентации Фг1 один из двух датчиков положения, размещенных диаметрально по окружности пусковой трубы, сформирует электрический сигнал управления Uу и выдаст его в блок разгона пускового механизма.
4. Под действием Uу в блоке разгона сработает один из двух электронных ключей и выдаст питание соответственно на одну из двух статорных катушек вращения гироскопа (КВ).
5. В результате взаимодействия магнитных полей КВ и постоянного магнита возникает вращающий момент и начинается раскрутка ротора гироскопа.
6. В последующем через каждые 180° поворота ротора срабатывает другой датчик положения и соответствующая КВ.
7. За время не более 5 с ротор раскручивается до 100 оборотов в секунду, блок разгона отключается, а поддержание вращения возлагается на систему стабилизации оборотов (ССО) ОГС
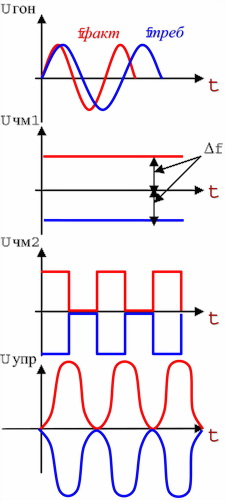
Рис. 31. К работе системы стабилизации оборотов ротора
Принципиально переключение катушек вращения происходит следующим образом:
А. Пусть ротор гироскопа имеет случайную ориентацию, как на рис. 32, и тогда постоянный магнит ротора создает магнитный поток Фг.
Б. Магнитные сердечники индуктивных датчиков положения (ДП 1,2) имеют некоторую исходную намагниченность и создают магнитные потоки Фдп1,2.
В. Фг, замыкаясь через сердечники датчиков, изменяет их намагниченность:
• Фдп1 — ?Фг;
• Фдп2 + ?Фг.
Таким образом, в этом положении ротора максимальную намагниченность приобретет сердечник ДП2 (т. к. Фдп2 + ?Фг), а значит его индуктивное сопротивление XL2 станет минимальным и, соответственно, увеличится ток в цепи ВЧ генератора, выпрямителя и падение напряжения на Rп, приложенное к базе транзисторного ключа VT2.
Г. Срабатывая, ключ пропустит ток через соответствующую катушку вращения — КВ2.
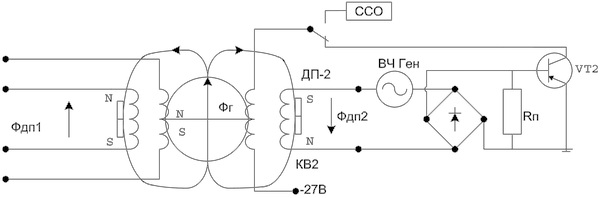
Рис. 32. Работа системы разгона ротора гироскопа
8. Задание и стабилизация оборотов гироскопа необходимы для поддержания частоты сканирования цели в узкой полосе пропускания усилительно-преобразовательного тракта сигнала ошибки наведения ракеты. Мы уже говорили, что частота сканирования цели принята равной 100 Гц и поэтому обороты ротора должны быть:
• 100 об/с — до пуска (нет вращения корпуса ракеты);
• 120 об/с — в полёте (так как корпус ракеты вращается относительно продольной оси в противоположном ротору направлении).
9. Датчиком фактической частоты вращения ротора является обмотка генератора опорных напряжений (ГОН), размещенная на статоре гироскопа. Магнит ротора наводит в ней синусоидальную ЭДС фактической частоты (fфакт), которая прикладывается ко входу частотомера ССО.
10. В частотомере происходит:
а) сравнение fфакт с требуемой (fтреб) и преобразование информации об ошибке (?f) в двуполярное постоянное напряжение, величина которого характеризует величину f, а полярность — необходимость разгона или торможения;
б) преобразование постоянного напряжения в импульсное с частотой ГОН (fфакт).
11. Усилитель ССО усиливает управляющий сигнал по мощности, изменяет его форму на колоколообразную и запитывает катушки вращения гироскопа.
12. Катушки вращения создают магнитное поле, притормаживающее или ускоряющее ротор.
Функционирование системы арретирования координатора цели
После разгона ротора гироскопа автомат разарретирования и пуска (АРП) пускового механизма обеспечивает коммутацию цепей включения в работу системы арретирования.
При этом:
1. Если оптическая ось координатора произвольно отклонена от продольной оси ракеты на некоторый угол пеленга ?, то постоянный магнит ротора, вращаясь, будет индуцировать:
а) в статорной обмотке пеленга синусоидальную ЭДС, амплитуда которой несет информацию о величине, а фаза — о направлении отклонения;
б) в обмотке заклона, размещенной в блоке датчиков пусковой трубы, синусоидальную ЭДС, амплитуда и фаза которой задают отклонение линии прицеливания от продольной оси ракеты на 10° вниз.
2. Так как обмотки включены встречно, то их разностный сигнал ошибки арретирования (?арр), отработанный до нуля следящим приводом координатора, обеспечит удержание оптической оси на линии прицеливания.
3. После прицеливания, нажатия на пусковой крючок и захвата цели (загорания лампочки) от следящего привода отключается сигнал ошибки арретирования ?арр, формируемый ССО (координатор разарретируется), и подключается сигнал ошибки слежения ??, формируемый КЦ (координатор начинает следить за целью).
Если излучение от цели не превышает сигнал фона, то АРП обеспечит периодическое арретирование гироскопа (лампочка мигает) и возможность захвата цели.
Функционирование следящего координатора цели при сопровождении цели
1. Благодаря размещению координатора цели на вращающемся роторе гироскопа осуществляется круговое сканирование положения цели относительно оптической оси в пределах поля зрения со стабильной частотой.
2. Тепловое излучение цели, фона и ЛТЦ селектируется и фокусируется оптической системой в виде пятен малого размера (1 мм) в фокальных плоскостях основного (цели) и вспомогательного (помех) каналов координатора. Положение пятен однозначно характеризует пространственное положение цели и помех относительно оптической оси координатора (ошибку слежения).
3. С помощью фотоприёмника сфокусированные тепловые потоки цели и помех подвергаются импульсной модуляции и преобразованию в информационные электрические периодические сигналы ошибки слежения. Причем важно, что в спектре сигнала цели содержится первая гармоника частоты сканирования (fскан), амплитуда которой характеризует величину, а изменение фазы в периоде сканирования (Тскан) — направление ошибки слежения за целью (??).
4. Сигналы с выходов основного и вспомогательного каналов координатора поступают на схему переключения (СП) следящей системы, которая обеспечивает защиту от ЛТЦ путём стробирования (временной селекции) в периоде сканирования только сигнала цели. Сигнал цели с выхода СП поступает:
а) на избирательный усилитель;
б) на обнаружитель цели АРП пускового механизма.
5. Избирательный усилитель и амплитудный детектор используются для выделения из сложного сигнала цели информационного сигнала первой гармоники частоты сканирования.
6. Фазовращатель компенсирует временную задержку информационного сигнала в электронном блоке для управления в реальном масштабе времени.
7. В усилителе коррекции происходит повышение качества и мощности сигнала ошибки слежения. Как мы уже знаем, сигнал на выходе усилителя коррекции Uук является:
а) управляющим для исполнительного элемента следящей системы — катушки коррекции;
б) задающим для системы автоматического управления рулями — автопилота;
в) информационным для схем логической коммутации пускового механизма — автомата разарретирования и пуска.
8. Катушка коррекции создает внутри статора магнитное поле, вектор напряженности которого (hк) совпадает с продольной осью ракеты, а его направление и величина изменяются по закону сигнала ошибки слежения, т. е. hк ? Uук.
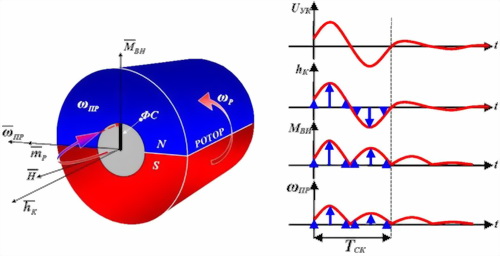
Рис. 33. Использование свойства прецессии гироскопа:
?пр — вектор угловой скорости прецессии (коррекции СКЦ); вращается с ?р ~ и Мвн;
mр — вектор магнитного момента постоянного магнита (связан с линией раздела полюсов магнита и согласован с положением фотосопротивления; вращается с ?Р; имеет постоянную величину);
Н — вектор кинетического момента ротора (имеет постоянную величину и направление; совпадает с осью вращения ротора);
hк — вектор напряженности магнитного поля катушек коррекции (совпадает с продольной осью ракеты; изменяет величину и направление по сигналу ошибки слежения);
Мвн — вектор внешнего момента, создаваемый взаимодействием магнитных полей катушек коррекции и постоянного магнита (вращается с ?Р; изменяет величину по сигналу ошибки слежения; точно «привязан» к положению фотосопротивления);
?р, ?пр — угловая скорость и направление вращения ротора и прецессии ротора;
N, S — полюса постоянного магнита;
ФС — фотосопротивление
В результате взаимодействия магнитных полей катушки коррекции и постоянного магнита ротора (характеризующегося вектором магнитного момента mр) возникает внешний электромагнитный момент (Mвн), приложенный к ротору гироскопа (правило трех пальцев правой руки: если указательный палец направить по mр, а согнутый на 90° средний палец по hк, то большой палец укажет Mвн). Учитывая, что магнит и его mp вращаются и что hк изменяется по синусоидальному закону ошибки слежения, можно представить эпюру изменения величины и направления Mвн за один оборот ротора. Видно, что равнодействующая (?Mвн) находится в плоскости и пропорциональна ошибке слежения.
9. Из теории и практики гироскопа известно, что при наличии внешнего момента, приложенного к ротору, гироскоп будет прецессировать, т. е. стремиться совместить по кратчайшему пути вектор кинетического момента (H) с Mвн, причем с угловой скоростью ?пр, пропорциональной Mвн.
Благодаря свойству прецессии:
а) гироскопический следящий координатор безынерционно совмещает свою оптическую ось с линией визирования (направлением на цель), т. е. автоматически сопровождает цель;
б) при сопровождении цели сигнал ошибки слежения (U??) пропорционален угловой скорости прецессии, а значит угловой скорости линии визирования «ракета — цель» (d?в/dt) и поэтому с выхода усилителя коррекции он подается на вход автопилота для реализации метода пропорционального сближения (d?в/dt = 0) как сигнал ошибки наведения ракеты на цель.
Автопилот
Автопилот ракеты 9М39 входит в состав ОГС и предназначен для автоматического управления полётом ракеты. Он представляет собой одноканальную систему автоматического управления, задающим воздействием для которой является сигнал ошибки слежения с выхода следящего координатора цели, а объектом управления — рули ракеты, работающие в релейном режиме.
Автопилот решает следующие задачи:
1. Фильтрация сигнала ошибки наведения, пропорционального угловой скорости линии визирования (d?в/dt), — для реализации метода пропорционального сближения и повышения качества управления полетом.
2. Формирование специального сигнала управления ракетой по пеленгу на начальном участке траектории — для ускорения вывода на кинематическую траекторию и увеличения зоны поражения за счёт приближения ближней границы.
3. Преобразование сигнала ошибки наведения с частоты сканирования цели на частоту вращения ракеты — для реализации одноканального управления полётом.
4. Формирование импульсного сигнала управления на рулевом приводе — для реализации релейного режима его работы.
5. Демпфирование поперечных колебаний корпуса ракеты относительно центра масс — для повышения точности и устойчивости наведения.
6. Смещение центра группирования попаданий ракеты от сопла в корпус цели.
К задачам и принципам работы автопилота:
1. При заданном методе пропорционального сближения автопилот должен вести ракету в упреждённую точку встречи с целью по траектории, обеспечивающей отсутствие угловой скорости линии визирования, т. е. наличие угловой скорости является ошибкой наведения (параметром управления), которую автопилот должен свести к нулю.
2. Датчиком угловой скорости линии визирования является гироскопический следящий координатор цели, синусоидальный сигнал, следующий на частоте сканирования, несет в себе информацию о плоскости и величине ошибки наведения.
3. При прицеливании и пуске ракета направляется на цель, а не в упрежденную точку, поэтому ошибка наведения велика. Для ускорения её отработки программно (в зависимости от стрельбы навстречу или вдогон) увеличивается команда управления рулевым приводом, обеспечивающая быстрое придание ракете требуемого угла пеленга (между продольной осью ракеты и оптической осью координатора) в плоскости наведения.
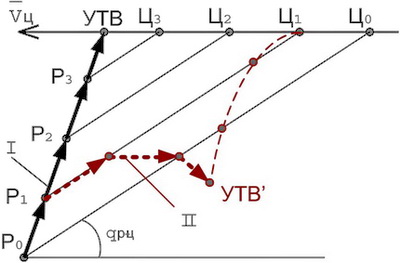
Рис. 34. Траектория движения ЗУР по методу пропорционального движения
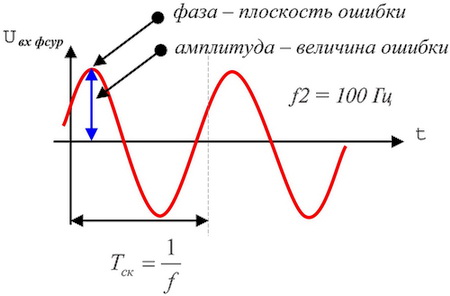
Рис. 35. Сигнал ошибки наведения
При одноканальном управлении полётом вращающейся относительно продольной оси ракеты информация об ошибке наведения должна следовать на частоте вращения пары рулей. Для преобразования частоты информационного сигнала используется фазовый детектор, выделяющий сигнал разностной частоты: сканирования (f2) и генератора опорных напряжений (f2 + f3), т. е. f3. Важно, что при преобразовании частоты информация о плоскости и величине ошибки наведения сохраняется.
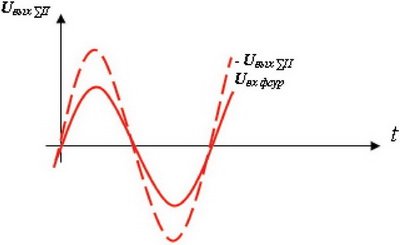
Рис. 36. Сигнал ошибки наведения на начальном участке полёта
Для придания линейной зависимости величины управляющей силы от величины сигнала ошибки (Uфд) используется генератор линеаризации (ГЛ), вырабатывающий синусоидальное напряжение (Uгл) удвоенной частоты вращения корпуса ракеты (2f3) и определенной амплитуды.
Из суммарного сигнала (Uвых?II) Uфд и Uгл сформируется сигнал управления рулями удвоенной частоты и переменной длительности импульсов.
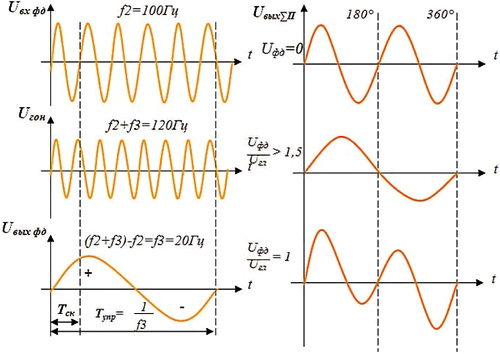
Рис. 37. Преобразование сигнала ошибки наведения
Для обеспечения релейного режима работы рулей синусоидальный сигнал ошибки наведения на частоте управления должен быть преобразован в двухполярный импульсный сигнал управления рулевым приводом. Для этого используются усилитель-ограничитель и усилитель мощности, работающий в ключевом режиме. Такой сигнал управления обеспечит переброс рулей из одного крайнего положения в другое четыре раза за период вращения и разное время нахождения рулей в каждом из положений в зависимости от соотношения амплитуд Uфд и Uгл.
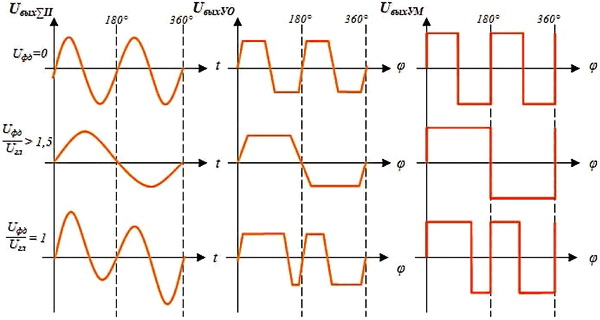
Рис. 38. Получение сигнала управления рулями
Под действием импульсного сигнала управления рулевой привод создаст управляющую аэродинамическую силу, уменьшающую ошибку наведения.
Так как на участке разгона ракеты эффективность аэродинамических рулей мала, то дополнительно используется пороховой управляющий двигатель (ПУД). Два сопла ПУД размещены диаметрально в плоскости, перпендикулярной рулям. Подача газа в одно из сопел регулируется той же рулевой машиной и обеспечивает создание управляющей реактивной силы, синхронной управляющей аэродинамической силе рулей.
Функционально автопилот состоит из следующих элементов:
I. Формирователь сигнала управления рулями (ФСУР).
1. Фильтр сигнала ошибки наведения:
а) синхронный фильтр;
б) динамический ограничитель.
2. Формирователь сигнала управления рулями на начальном участке траектории:
а) ФСУР по пеленгу;
б) ?I.
3. ФСУР-1:
а) фазовый детектор;
б) генератор линеаризации;
в) ?II;
г) фильтр.
4. ФСУР-2:
а) усилитель-ограничитель;
б) усилитель мощности.
5. Контур отрицательной динамической обратной связи:
а) датчик угловой скорости;
б) усилитель.
6. Схема смещения.
II. Рулевая машина.
III. Пороховой управляющий двигатель.
Элементы ФСУР размещены в электронном блоке ОГС, а датчик угловой скорости, рулевая машина и пороховой управляющий двигатель в рулевом отсеке.
Входными сигналами автопилота являются:
а) сигнал ошибки наведения с выхода усилителя коррекции следящего координатора цели; сигнал со статорных катушек генератора опорных напряжений;
б) сигнал со статорной катушки пеленга;
в) сигнал с кнопки «вдогон» пусковой трубы;
г) сигнал управления пуском с пускового механизма.
Для управления рулями используется энергия порохового аккумулятора давления бортового источника питания.
Выходами автопилота являются управляющие воздействия на рули планера ракеты и сопла порохового управляющего двигателя.
Особенности устройства и работы элементов ФСУР
Фазовый детектор
В данном случае фазовый детектор используется для переноса спектра информационного сигнала ошибки наведения с частоты сканирования f2 на частоту управления полётом f3 с сохранением амплитудных и фазовых соотношений. Для преобразования используется опорное напряжение с катушек ГОН, имеющее частоту f2 + f3. Операция переноса спектра реализуется перемножением информационного и опорного сигналов. В качестве умножителя используются два операционных усилителя с инвертирующим включением. В цепи отрицательной обратной связи ОУ включены нелинейные элементы — диоды. И поэтому в них протекают токи комбинационных частот (m (f2 + f3) ± nf2).
Далее, используя фазовые соотношения и логику последовательного алгебраического суммирования, взаимно подавляют сигналы исходных частот (сканирования и ГОН), а из оставшихся сигналов суммарной и разностной частот с помощью двойного Т-образного фильтра выделяют сигнал разностной частоты [(f2 — f3) — f2 = f3].
Физический смысл такого преобразования состоит в том, что ошибка наведения проецируется на вращающуюся плоскость, в которой рули создают управляющую силу. При этом получаемый синусоидальный сигнал частоты f3 будет нести в себе информацию о том, в какую сторону (фаза сигнала) и насколько (амплитуда сигнала) нужно повернуть рули в любой момент периода их вращения, чтобы создаваемая ими управляющая сила непрерывно уменьшала ошибку наведения.
Информационный сигнал на частоте управления с выхода фазового детектора поступает на первый вход сумматора (?II) схемы линеаризации.
Схема линеаризации
Схема состоит из генератора линеаризации и сумматора-усилителя.
Генератор линеаризации собран по схеме RC-генератора низкой частоты с использованием операционного усилителя, частоты зависимой RC-цепи положительной обратной связи и фильтра низких частот. Генератор вырабатывает синусоидальное напряжение удвоенной частоты управления (2f3), поступающее на второй вход сумматора.
При этом суммарный сигнал (Uсум = Uфд + Uгл) на выходе сумматора ?II определяется в зависимости от соотношения амплитуд Uфд и Uгл.
Усилитель-ограничитель
Усилитель состоит из каскада усиления на интегральной схеме дифференциального усилителя и каскада ограничения на составном транзисторе.
Входными сигналами усилителя являются суммарный информационный сигнал с ?II и сигнал датчика угловых скоростей контура демпфирования колебаний корпуса ракеты.
Выходной управляющий импульсный сигнал подается на усилитель мощности, работающий в ключевом режиме.
Вид выходного сигнала в зависимости от Uсум представлен на рис. 38.
Очевидно, что под действием управляющего сигнала рулевая машина будет перебрасывать рули из однократного положения в другое по-разному:
• При Uфд = 0 рули перебрасываются четырежды за один оборот корпуса и будут находиться в каждом положении одинаковое время, поэтому результирующая управляющей силы, создаваемая ими, будет равна нулю.
• При Uфд/Uгл > 1,5 рули перебрасываются дважды на одинаковое время.
Вспомнив, что с плоскостью ошибки наведения связана фаза Uфд, а значит и временное положение импульсов Uуд в периоде управления (Тупр), понимаем, что рули создадут максимальную результирующую управляющую силу, лежащую в плоскости ошибки наведения и уменьшающую эту ошибку.
• При 0 < Uфд/Uгл < 1,5 рули перебрасываются четырежды на разное время и создадут результирующую управляющую силу (R) в плоскости ошибки, по величине пропорциональную коэффициенту команды Кк = Ri/Rmax.
Таким образом, с помощью схемы линеаризации введена линейная зависимость управляющей силы от величины ошибки наведения.
ФУНКЦИОНИРОВАНИЕ АВТОПИЛОТА
1. Сигнал ошибки наведения ракеты, пропорциональный угловой скорости линии визирования, с выхода усилителя коррекции следящего координатора цели поступает на синхронный фильтр формирователя сигнала управления рулями (ФСУР). Информация о величине и плоскости ошибки наведения содержится в амплитуде и фазе периодического сигнала с частотой сканирования цели.
2. Синхронный фильтр позволяет выделить первую гармонику входного сигнала и обеспечивает высокую точность передачи информации.
3. С помощью усилителя-динамического ограничителя задаётся и стабилизируется требуемый коэффициент передачи входного сигнала на суммирующий усилитель ?I. На второй вход сумматора поступает сигнал со схемы ФСУРа по пеленгу.
4. Схема ФСУРа по пеленгу, используя сигналы статорной катушки пеленга, блока пусковой логики и кнопки «НАВСТРЕЧУ-ВДОГОН», формирует на начальном этапе полёта ракеты дополнительный синусоидальный сигнал, при суммировании которого с сигналом ошибки наведения обеспечивается ускоренный вывод ракеты на кинематическую траекторию.
5. Для реализации одноканального управления фазовый детектор, используя сигнал ошибки наведения с выхода сумматора ?I, следующий на частоте сканирования f2, и сигнал генератора опорных напряжений с частотой вращения ротора f2 + f3, переносит информацию об ошибке наведения с частоты сканирования на частоту управления рулями f3. Синусоидальный сигнал частоты f3 несёт в себе информацию о том, в какую сторону (фаза) и насколько (амплитуда) нужно отклонить рули в любой момент периода их вращения, чтобы создаваемая ими управляющая сила непрерывно уменьшала ошибку наведения. Сигнал с выхода фазового детектора поступает на суммирующий усилитель ?II схемы линеаризации.
6. Схема линеаризации применяется для сохранения линейной зависимости величины управляющей силы, создаваемой рулями, от величины сигнала ошибки наведения при использовании релейного режима работы рулей. Благодаря ей формируется суммарный управляющий сигнал, обеспечивающий переброс рулей на ±15° четыре раза за период вращения и нахождение рулей разное время в каждом из положений. Нужно помнить, что фаза суммарного управляющего сигнала ошибки наведения будет задавать плоскость результирующей управляющей силы, совпадающей с плоскостью ошибки наведения.
7. С помощью усилителя-ограничителя и усилителя мощности, работающего в ключевом режиме, суммарный управляющий сигнал с выхода ?II преобразуется в импульсное двухполярное напряжение управления электромагнитами рулевой машины.
8. Для гашения поперечных колебаний корпуса ракеты, возникающих при управлении, используется контур отрицательной динамической обратной связи (электронный амортизатор), повышающий устойчивость управления. Для этого сигнал датчика угловой скорости колебаний с определённым коэффициентом передачи вычитается на входе усилителя#ограничителя из суммарного управляющего сигнала.
9. Под действием управляющего напряжения поочередно срабатывают электромагниты золотника, обеспечивая подачу газов порохового аккумулятора, давление (ПАД) в полости рабочего цилиндра рулевой машины и соответствующее перемещение поводка и рулей.
10. Рули создают аэродинамическую управляющую силу, результирующая R которой за период управления:
а) лежит в плоскости ошибки наведения ракеты;
б) направлена на уменьшение ошибки наведения;
в) пропорциональна величине ошибки наведения.
Под действием результирующей управляющей силы ракета удерживается на кинематической траектории полёта в упрежденную точку встречи с целью.
11. На участке разгона ракеты эффективность аэродинамического управления недостаточна, поэтому дополнительно используется пороховой управляющий двигатель.
Для повышения эффективности поражения цели во ФСУРе предусмотрена схема смещения, обеспечивающая на конечном участке полёта смещение траектории от сопла в корпус самолёта.
РУЛЕВОЙ ОТСЕК
В рулевом отсеке размещены элементы бортовой энергосистемы и автопилота.
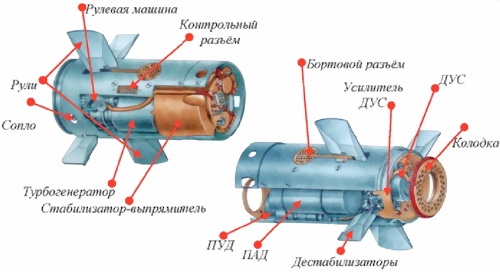
Рис. 39. Устройство рулевого отсека
Пороховой аккумулятор давления
Пороховой аккумулятор давления (ПАД) предназначен для питания пороховыми газами турбогенератора, а также рулевой машины.
Он представляет собой камеру с зарядом твёрдого топлива и элементами воспламенения. Образование пороховых газов происходит за счёт торцевого горения заряда, поэтому длина ПАД определяется временем управляемого полёта ракеты.
Технические характеристики:
• скорость горения заряда — примерно 5 мм/с;
• время горения — не менее 11 с;
• расход газа — 2,5 г/с.
ПАД состоит из стального корпуса, являющегося камерой сгорания. Внутри корпуса размещается пороховой заряд, покрытый бронировкой — защитным слоем, препятствующим горению с боковых сторон. В корпус ввёрнут воспламенитель, состоящий из электровоспламенителя, навески пороха и пиротехнической петарды.
При срабатывании электровоспламенителя срабатывает пиротехническая петарда, затем воспламеняется навеска пороха. Раскалённые частицы пороха поджигают основной заряд, и происходит его торцевое горение со скоростью примерно 5 мм/с в течение не менее 11 с. С выхода ПАД газ через дроссель и газовую втулку поступает в турбогенератор и РМ.
ПАД, как и ПУД, являясь пиротехническим устройством, несет определенную опасность. Поэтому при сборке рулевого отсека пиротехнические устройства не снаряжаются. Заряды и электровоспламенители поступают отдельно на снаряжательную базу и устанавливаются при общем снаряжении ракеты. Контроль качества ПАД и ПУД производится на отдельных сборках, взятых из партии, без установки в рулевой отсек путём поджига их с замером внутрибаллистических характеристик темперирования на предельных температурах.
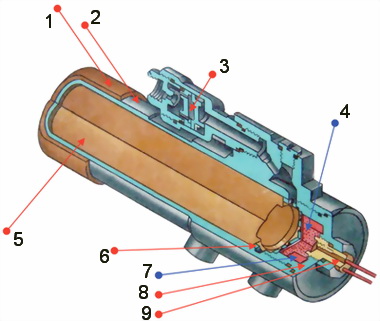
Рис. 40. Устройство ПАД:
1 — чехол теплозащитный; 2 — корпус; 3 — фильтр; 4 — навеска дымного пороха; 5 — пороховой заряд; 6 — бронировка; 7 — пиротехническая петарда; 8 — корпус воспламенителя; 9 — электровоспламенитель
Бортовой источник питания
Бортовой источник питания (БИП) предназначен для обеспечения энергией аппаратуры ракеты. Он представляет собой маленькую электростанцию, источником энергии для которой, как и для рулевой машины, являются газы, образующиеся при работе ПАД.
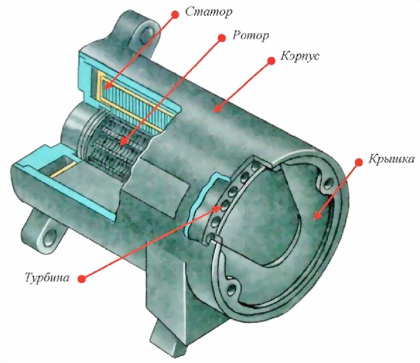
Рис. 41. Устройство БИП
К элементам БИП относятся:
1) турбогенератор;
2) стабилизатор-выпрямитель.
1. Турбогенератор, имеющий большую удельную мощность, предназначен для выработки напряжения переменного тока. Он представляет собой однофазный генератор с возбуждением от постоянного магнита и приводом от одноступенчатой активной турбины на его валу.
2. Стабилизатор-выпрямитель представляет собой электрический прибор и предназначен для преобразования напряжения переменного тока, поступающего с турбогенератора, в напряжение постоянного тока и его стабилизации.
Технические характеристики БИП:
• мощность — 250 Вт;
• частота оборотов турбины — 9000–18000 об/мин;
• выдаваемое напряжение постоянного тока — 40±2 В и 20±2 В.
1. Турбогенератор состоит из статора и ротора, на оси которого крепится турбина, являющаяся его приводом. Статор представляет собой литой корпус, в котором установлены два постоянных магнита 10МДК-25ВА и две секции с обмотками.
Статор залит компаундом К-153, который обеспечивает жесткое крепление всех входящих в него деталей, а также механическую защиту и электрическую прочность обмоток.
Ротор представляет собой вал с установленными на нём штампованными звездочками специальной формы из электротехнической стали 49КФ, приклеенными клеем БФ-4.
На валу насажены два радиальных шарикоподшипника. Один из них служит опорой ротора. Он предварительно завальцовывается во втулку из нержавеющей стали, которая с помощью фланца крепится к статору винтами. Второй шарикоподшипник может перемещаться в осевом направлении и является плавающей опорой. При сборке после установки ротора в статор он закрывается крышкой и на нём крепится турбина.
Особенностью устройства турбогенератора является совмещение в одной конструкции генератора и турбопривода. Турбопривод, кроме турбины, включает ещё цилиндрическое расширяющееся сопло с критическим сечением 1,5 мм и диаметром на выходе 2,1 мм, расположенное под углом 17° к корпусу статора. Для выхода газа в корпусе рулевого отсека имеется прямоугольный паз, через который газ сбрасывается в атмосферу.
Диаметр турбины определяется максимальным габаритом магнитной системы турбогенератора. Диаметр отверстий турбины, создающих рабочие поверхности лопаток, и их число выбраны из условия прочности перемычек. Они и сталь, в свою очередь, определяют диаметр выходного сечения сопла с учетом необходимого перекрытия.
Работа турбогенератора основана на эффекте индуцирования переменной ЭДС в обмотках статора при изменении внутри них величины магнитного потока. Переменный магнитный поток в магнитопроводе катушек возникает вследствие изменения между полюсами магнитов величины воздушного зазора (а следовательно, и его магнитного сопротивления) при вращении ротора.
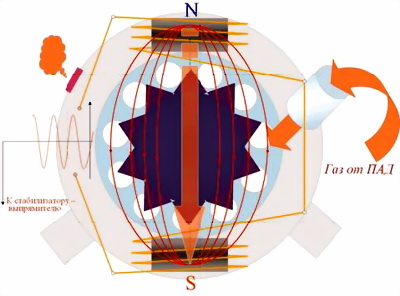
Рис. 42. Работа турбогенератора
Пороховые газы ПАД через сопло попадают на лопатки турбины и приводят её во вращение вместе с ротором. При повороте ротора на половину полюсного деления величина магнитного потока, проходя через обмотку генератора, уменьшается, а при повороте ротора на одно полюсное деление — увеличивается, что соответствует одному периоду переменного тока. Индуцированная в обмотке статора переменная ЭДС снимается с клемм и подается на вход стабилизатора-выпрямителя. Частота переменного тока зависит от количества зубьев в звездочке и скорости вращения турбины.
Число зубьев в звездочке ограничено конструкцией турбогенератора. Максимальная частота его вращения зависит от параметров газового потока, силы трения и физических возможностей вращающихся деталей, в первую очередь подшипников.
Можно определить частоту переменного тока по формуле: f = Zpn/60, где Zp — число зубьев (10); n — число оборотов в минуту (9000–18000).
2. Стабилизатор-выпрямитель выполняет две функции:
1) преобразует напряжение переменного тока турбогенератора в требуемые значения постоянных напряжений и поддерживает их стабильность при изменениях скорости вращения ротора турбогенератора и тока нагрузки;
2) регулирует скорость вращения ротора турбогенератора при изменении давления газа на входе в сопло путём создания дополнительной электромагнитной нагрузки на вал турбины.
Для этого структурная схема стабилизатора-выпрямителя состоит из взаимосвязанных цепей нагрузки, регулирования и управления, и фактически стабилизация напряжения происходит по обоим контурам одновременно.
В первом случае способ стабилизации частоты магнитоэлектрического синхронного генератора основан на гашении избыточной мощности привода за счёт превращения её в потерю в магнитопроводе генератора, для чего в цепь нагрузки включён управляющий дроссель насыщения.
Недогруженный генератор развивает обороты, превышающие необходимые для обеспечения требуемой нагрузки, а повышение оборотов ведёт к повышению напряжения на нагрузке. Это напряжение сравнивается с опорным в схеме сравнения, и выделяется разностный сигнал, который обеспечивает компенсацию увеличения напряжения на нагрузке и стабилизирует его на определенном уровне. По мере роста напряжения до 40 В пробивается стабилитрон. В цепи стабилизации протекает значительный ток, который вызывает увеличение электрических потерь в генераторе и торможение ротора.
Во втором случае повышение оборотов вызывает увеличение магнитного потока в генераторе и возрастание потерь на подмагничивание и вихревые токи. Возрастание потерь с учётом повышенной частоты, близкой к резонансной, настолько значительно, что вызывает большой дополнительный момент, вызывающий торможение вала турбогенератора, и ограничивает скорость вращения ротора.
Поскольку напряжение 20 В формируется с тех же витков трансформатора, то стабилизируется и оно. Стабилизированное напряжение 20 В поступает со стабилизатора-выпрямителя на ОГС, РО, ДУС, БЧ.
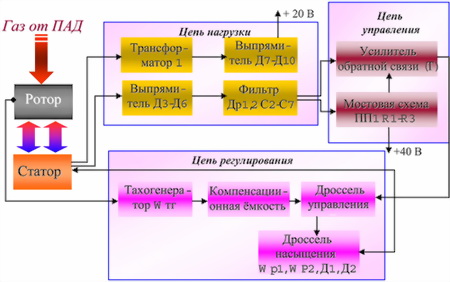
Рис. 43. Структурная схема стабилизатора-выпрямителя
Рулевая машина
Рулевая машина предназначена для аэродинамического управления ракетой в полёте. Одновременно РМ служит распределительным устройством в системе газодинамического управления ракетой на начальном участке траектории, когда аэродинамические рули неэффективны. Она является газовым усилителем управляющих электрических сигналов, формируемых ОГС.
Рулевая машина (РМ) состоит из обоймы, в приливах которой расположены рабочий цилиндр с поршнем и фильтр тонкой очистки пороховых газов. В обойму запрессован корпус с золотниковым распределителем, состоящим из четырехкромочного золотника, двух втулок и якорей. В корпусе также размещены две катушки электромагнитов. Обойма имеет две проушины, в которых на подшипниках расположена стойка с пружинами (рессорой) и с напрессованным на нее поводком.
В пазах поводка и стойки расположены рули, которые в полёте удерживаются в раскрытом положении стопорами и пружинами. В приливе обоймы, между проушинами, размещается газораспределительная втулка, жёстко закрепленная с помощью фиксатора на стойке. На втулке имеется паз с отсечными кромками для подвода газа, поступающего от ПУД к каналам и соплам.
РМ работает от газов ПАД, которые по трубе через фильтр тонкой очистки поступают к золотнику и от него по каналам в кольцах, корпусе и обойме под поршень.
Управляющие сигналы с ОГС поступают поочерёдно в катушки электромагнитов РМ. При прохождении тока через правую катушку электромагнита якорь с золотником притягивается в сторону этого электромагнита и открывает проход газа в левую полость рабочего цилиндра под поршень. Под давлением газа поршень перемещается в крайнее правое положение до упора в крышку. Перемещаясь, поршень увлекает за собой выступ поводка и поворачивает поводок и стойку, а вместе с ними и рули в крайнее положение.
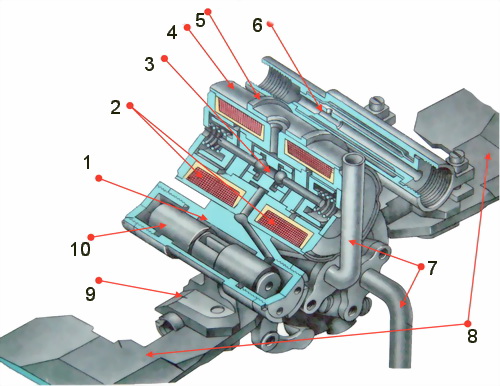
Рис. 44. Устройство рулевой машины:
1 — рабочий цилиндр; 2 — катушки электромагнитов; 3 — золотниковый распределитель; 4 — корпус; 5 — обойма; 6 — фильтр; 7 — сопла; 8 — рули; 9 — поводок; 10 — поршень
Одновременно поворачивается и газораспределительная втулка, при этом отсечённая кромка открывает доступ газа от ПУД через канал к соответствующему соплу.
При прохождении тока через левую катушку электромагнита поршень перемещается в другое крайнее положение.
В момент переключения тока в катушках, когда усилие, создаваемое пороховыми газами, превышает силу притяжения электромагнита, золотник под действием силы от пороховых газов перемещается, причём перемещение золотника начинается раньше, чем происходит нарастание тока в другой катушке, что повышает быстродействие РМ.
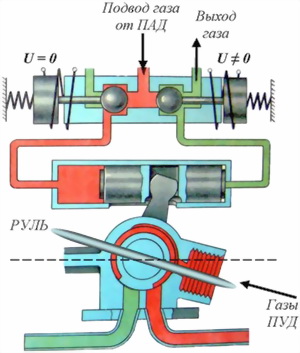
Рис. 45. Устройство рулевой машины
Пороховой управляющий двигатель
ПУД предназначен для газодинамического управления ракетой на начальном участке траектории полёта.
В рулевом отсеке находятся такие пиротехнические устройства, как пороховой аккумулятор давления (ПАД) и пороховой управляющий двигатель (ПУД). Особенности работы этих устройств определяют их одинаковые конструкции и компоновку. Каждый из них состоит из корпуса, выполненного из прочной стали, в который вложен пороховой заряд и установлен элемент воспламенения. Пороховой заряд представляет собой шашку из баллистического состава. Как известно, пороха бывают баллистическими и смесевыми. Ярким представителем смесевого пороха является простой, так называемый дымный оружейный порох, изобретённый в древнем Китае и представляющий собой механическую смесь тонко измельченного минерального окислителя (селитры), органического горючего (угля) и полимерной связки (серы). В настоящее время такой порох применяется менее широко, так как его повсеместно заменяют баллистические пороха. Баллистический состав представляет собой вещество, в котором основные компоненты твердого топлива (окислитель и горючее) входят в структуру одной молекулы. Основой таких порохов является микроклетчатка. В зависимости от назначения пороха по-разному обрабатываются с добавлением различных добавок. В результате горение такого вещества происходит без образования крупных частиц и с высокими показателями удельного объема газа (объема, который занимает продукт сгорания вещества).
Для воспламенения вещества используется воспламенитель, который включает в себя электровоспламенитель, пиротехническую петарду и навеску из смесевого (дымного) пороха. Электровоспламенитель представляет собой электротехническое изделие, в металлическом корпусе которого размещаются колодка с мостиком накаливания, на который нанесена капелька вещества, надёжно вспыхивающая от нагрева мостика (металлической проволоки), и небольшая навеска пиротехнического состава, которую поджигает вспыхивающее вещество колодки.
Корпус электровоспламенителя после сборки заливается герметизирующим составом. Электровоспламенитель имеет посадочные места с резьбой и проводами с наконечниками. Энергии воспламенителя зачастую недостаточно для воспламенения основного заряда. Поэтому для надёжного воспламенения заряда применяют воспламенитель. Он состоит из пиротехнической петарды и навески дымного пороха.
После срабатывания электровоспламенителя загорается пиротехническая петарда, поджигающая навеску пороха. При сгорании пороха образуются крупные раскалённые частицы, которые попадают на основной заряд и вызывают его возгорание. Горение основного заряда происходит по всей его открытой поверхности. В зависимости от требований к скорости газообразования и времени работы устройства форма заряда может быть выбрана такой, что она обеспечит максимальную поверхность горения. Это достигается образованием различных щелей, срезов и внутренних профилей. Если же требуется уменьшить поверхность горения, то её закрывают различными бронировками, обеспечивая, например, только торцевое горение заряда.
ПУД состоит из корпуса, представляющего собой камеру сгорания, и переходника. Внутри корпуса размещаются пороховой заряд и воспламенитель, состоящий из электровоспламенителя, навески пороха и пиротехнической петарды. Расход газа и параметры внутренней баллистики определяются дроссельным отверстием в переходнике.
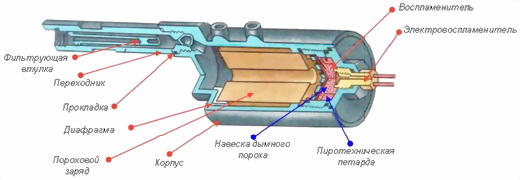
Рис. 46. Устройство ПУД
После вылета ракеты из пусковой трубы и раскрытия рулей электрический импульс с конденсатора взведения поступает на электровоспламенитель, воспламеняющий навеску пороха и петарду, от форса пламени которых загорается пороховой заряд. Пороховые газы, проходя через распределительную втулку и два сопла, расположенные перпендикулярно плоскости рулей РМ, создают управляющее усилие, обеспечивающее разворот ракеты.
Датчик угловой скорости
ДУС предназначен для формирования электрического сигнала, пропорционального угловой скорости колебаний ракеты относительно её поперечных осей. Этот сигнал используется в качестве отрицательной динамической обратной связи в контуре демпфирования поперечных колебаний, возникающих при управлении ракетой.
ДУС представляет собой рамку с двумя электромагнитными обмотками, которая на полуосях подвешена в центровых винтах с корундовыми подпятниками и может покачиваться в рабочих зазорах магнитной цепи, состоящий из основания, постоянного магнита и башмаков. Сигнал угловой скорости снимается с обмоток рамки и через безмоментные растяжки выводится на контакты, изолированные от корпуса.
Рис. 47. Устройство ДУС:
1 — корундовый подпятник; 2 — контакты; 3 — рамка с обмотками; 4 — безмоментные растяжки; 5 — башмак; 6 — постоянный магнит; 7 — полуось; 8 — винт; 9 — контакты обмоток
ДУС устанавливается в центре масс так, чтобы его ось ОХ совпадала с продольной осью ракеты. При этом:
• При прямолинейном полёте вращающейся ракеты рамка под действием центробежных сил самоустановится в плоскости, перпендикулярной оси вращения ракеты. ЭДС в её обмотках не наводится, так как обмотки не перемещаются в магнитном поле постоянного магнита.
• При отклонении ракеты от прямолинейного полёта в некоторой плоскости (? — угол наклона плоскости отклонения относительно направления вверх) с некоторой угловой скоростью ? быстровращающаяся вместе с корпусом ракеты рамка приобретёт свойства гироскопа, и на неё начнёт действовать гироскопический момент Mг.
Под действием гироскопического момента рамка ДУС начинает колебаться в магнитном поле постоянного магнита, и в её обмотках индуцируется синусоидальная ЭДС, амплитуда которой характеризует величину угловой скорости отклонения (?), а фаза — угол наклона плоскости отклонения (?). Снимаемый с обмоток рамки сигнал через усилитель ДУС подается на усилитель-ограничитель ФСУР, повышающий устойчивость управления ракетой. Часть усиленного сигнала поступает на дополнительную демпфирующую обмотку рамки для компенсации её собственных колебаний.
БОЕВОЕ СНАРЯЖЕНИЕ
Боевое снаряжение ракеты (изделие 9Н312Ф) предназначено для поражения воздушной цели или нанесения ей повреждений, приводящих к невозможности выполнения боевой задачи.
Основными поражающими факторами являются: фугасное действие ударной волны продуктов взрыва боевой части и остатков топлива двигательной установки, а также осколочное действие элементов, образующихся при взрыве и дроблении корпуса.
Таблица 6
Основные технические характеристики
| 1 | Масса, кг | 1,27 |
|---|---|---|
| в том числе взрывчатого вещества, кг | 0,4 | |
| 2 | Тротиловый эквивалент взрывчатого вещества, кг | 0,53 |
| 3 | Длина отсека, мм | 137 |
| 4 | Диаметр, мм | 71 |
| 5 | Количество осколков, шт. | 330 |
| 6 | Угол разлета осколков, град. | 25 |
| 7 | Скорость детонации взрывчатого вещества, м/с | 8000 |
| 8 | Масса осколка, г | 0,4–0,5 |
| 9 | Толщина корпуса БЧ, мм | 3 |
| 10 | Скорость разлета осколков, м/с | 2000–2200 |
Состав боевого снаряжения
1. Боевая часть.
2. Взрыватель.
3. Взрывной генератор.
1. Боевая часть предназначена для создания заданного поля поражения, воздействующего на цель после получения от взрывателя инициирующего импульса.
Боевая часть состоит из следующих элементов:
а) корпус;
б) боевой заряд;
в) детонатор;
г) трубка.
Корпус выполнен из высокопрочной стали. Он представляет собой цилиндрическую деталь с толщиной стенок 3 мм. С торцов корпус имеет посадочные места и места крепления с соседними отсеками (РО и ДУ). Кроме того, на корпусе имеется бугель с отверстием, который при соединении заходит глубоко в рулевой отсек. В бугель при сборке входит стопор трубы, предназначенный для фиксации в ней ракеты. Внутри корпус имеет насечку специальной формы, позволяющей при подрыве боевого заряда образовывать заданное дробление на осколки.
Боевой заряд представляет собой взрывчатое вещество (ВВ), запрессованное в корпус БЧ. ВВ изготовлено из вещества ОКФАЛ-20 (взрывчатая механическая смесь на основе октогена).
ВВ имеет достаточно высокие характеристики детонации — 8000 м/с — и в то же время отвечает требованию отсутствия детонации при случайных воздействиях, например падении, простреле и т. п. Для подрыва боевого заряда необходимо оказать на него определенное энергетическое воздействие с высокой скоростью по всей торцевой поверхности. Для этих целей служит детонатор.
Детонатор представляет собой заряд ВВ, более чувствительного к инициирующему воздействию со стороны взрывателя. В БЧ детонатор размещён непосредственно рядом с боевым зарядом и удерживается механической манжетой. Так как взрыватель расположен за боевым зарядом, то для его связи с РО (для получения питания) в боевом заряде имеется отверстие, сформированное установленной в этом месте трубкой. Через трубку протянуты четыре провода.
Необходимо отметить, что при способе заданного дробления образуются осколки 0,4–0,5 г, что позволяет им наносить эффективное поражение, в то время как при подрыве БЧ с гладким корпусом часть металла превращается в пыль и мелкие осколки.
2. Взрыватель (9Э249) предназначен для выдачи импульса на подрыв заряда БЧ при попадании ракеты в цель или по истечению времени самоликвидации, а также для передачи импульса от заряда БЧ к взрывному генератору. Расположение взрывателя за боевым зарядом обусловлено тем, что он должен сработать после проникновения боевой части внутрь цели. При ударе корпусные элементы ракеты разрушаются вследствие больших нагрузок и в таком виде проникают внутрь цели. Взрыватель же, находясь за основным зарядом, успевает выдать импульс на его подрыв до своего разрушения, но при проникновении заряда внутрь цели.
Взрыватель относится к электромеханическому типу. Он имеет две ступени предохранения, которые снимаются в полёте, чем обеспечивается безопасность при эксплуатации комплекса.

Рис. 48. Устройство отсека боевой части:
1 — трубка с проводами; 2 — предохранительно-детонирущее устройтво (ПДУ); 3 — боевые цепи; 4 — боевой заряд (взрывчатое вещество); 5 — корпус с насечкой; 6 — детонатор; 7 — генераторные магнитоэлектрические датчики (ГМД)
Взрыватель состоит из следующих элементов:
• корпус;
• предохранительно-детонирующее устройство (ПДУ);
• механизм самоликвидации;
• трубка;
• основной датчик цели ГМД1 (импульсный вихревой магнитоэлектрический генератор);
• дублирующий датчик цели ГМД2 (импульсный волновой магнитоэлектрический генератор);
• пусковой электровоспламенитель ЭВ1;
• два боевых электровоспламенителя ЭВ2 и ЭВ3;
• пиротехнический замедлитель;
• инициирующий заряд;
• капсюль-детонатор;
• детонатор взрывателя.
ПДУ служит для обеспечения безопасности в обращении со взрывателем до момента взведения его после пуска ракеты. Он состоит из пиротехнического предохранителя, поворотной втулки с пружиной кручения и блокирующего стопора с пружиной сжатия. Пиротехнический предохранитель имеет в своём составе заряд, стопор и пружину сжатия. При этом пружина сжата, стопор подвыдвинут, и его перемещению под действием пружины препятствует заряд.
В исходном состоянии поворотная втулка развёрнута и сжимает пружину кручения. От поворота она удерживается блокирующим стопором, который, в свою очередь, сжимает пружину сжатия, и стопором пиротехнического предохранителя.
Механизм самоликвидации обеспечивает срабатывание капсюля-детонатора по истечении времени самоликвидации в случае промаха. В его составе имеется пиротехническая запрессовка, время горения которой 15–17 с.
Трубка обеспечивает подачу импульса от заряда БЧ к заряду ВГ. Она представляет собой трубку, в которую запрессован заряд ВВ. С обоих концов она закрыта заглушками.
Основной датчик цели ГМД1 вырабатывает электрический импульс при прохождении ракеты со скоростью не менее 80 м/с через металлическую преграду или вдоль неё. Работа датчика основана на возникновении ЭДС в обмотке катушки датчика под действием вихревых токов, возникающих в металлических материалах при движении через них или вдоль них постоянного магнита, входящего в конструкцию датчика. Тем самым обеспечивается подрыв БЧ после её проникновения в корпус цели в случае попадания в поверхность либо рикошета.
Дублирующий датчик цели ГМД2 вырабатывает электрический импульс при ударе взрывателя о преграду, в том числе и под различными углами рикошета. Иначе его называют ударным датчиком. Он состоит из волнового генератора, якоря и сердечника. При ударе якорь отрывается, перемещая сердечник, и в обмотках катушки волнового генератора возникает импульс тока.
Пусковой электровоспламенитель ЭВ1 предназначен для запуска ПДУ и механизма самоликвидации.
Боевые электровоспламенители ЭВ2 и ЭВ3 служат для инициирования капсюля-детонатора при наличии электрического импульса соответственно от ГМД2 и ГМД1.
Пиротехнический замедлитель служит для обеспечения задержки срабатывания капсюля-детонатора на время, достаточное для его срабатывания от ЭВ2.
Инициирующий заряд, капсюль-детонатор и детонатор взрывателя служат для подрыва боевой части.
3. Взрывной генератор предназначен для подрыва несгоревшей части топлива маршевой двигательной установки и создания тем самым дополнительного поля поражения. Взрывной генератор представляет собой расположенную в корпусе БЧ шашку с запрессованным в ней зарядом ВВ.
ФУНКЦИОНИРОВАНИЕ БОЕВОГО СНАРЯЖЕНИЯ
Принципиальная схема БЧ состоит из пусковой цепи и боевой цепи.
Пусковая цепь (между выводами 1 и 3) содержит электровоспламенитель ЭВ1 и 2 дросселя. Напряжение 40 В с конденсатора блока взведения розетки РО подается на электровоспламенитель ЭВ1 при пуске ракеты в момент замыкания контактов размыкателя после раскрывания рулей. Дроссели установлены для защиты от токов насыщения.
Боевая цепь (между выводами 1 и 2) питается от БИП напряжением 40 В в течение всего полёта ракеты. В боевую цепь входят: контактная группа В1, два боевых электровоспламенителя ЭВ2, ЭВ3, датчики цели ГМД1, ГМД2.
Контактная группа В1 представляет собой разомкнутые контакты, которые находясь на поворотной втулке замыкаются при её повороте.
При вылете ракеты из трубы и раскрытии рулей размыкатель розетки РО замыкается. Напряжение с конденсаторов блока взведения поступает на электровоспламенитель ЭВ1 взрывателя. Электровоспламенитель срабатывает и воспламеняет пиротехнический стопор и механизм самоликвидации.
При условии прогорания запрессовки пиротехнического стопора (через 1–1,9 с) и оседании инерционного стопора под действием осевого ускорения (более 9g) поворотная втулка под действием пружины разворачивается в боевое положение. При этом капсюль-детонатор совмещается с детонатором взрывателя, и замыкаются контакты питания боевой цепи от БИП. Снята вторая ступень предохранения. В это время продолжает гореть пиротехническая запрессовка механизма самоликвидации, а БИП подпитывает конденсаторы С1 и С2.
При попадании ракеты в цель в момент прохождения взрывателя через механическую преграду в обмотке основного датчика цели ГМД1 возникает импульс электрического тока, который поступает на электровоспламенитель ЭВ3, а от него воспламеняется капсюль-детонатор. Срабатывание капсюля-детонатора вызывает подрыв БЧ, трубка передает воздействие на заряд ВГ. При этом происходит срабатывание ВГ и подрыв остатков топлива МД. Также срабатывает и дублирующий датчик цели ГМД2. Импульс, наводимый в обмотке ГМД2, поступает на электровоспламенитель ЭВ2. От его срабатывания поджигается пиротехнический воспламенитель, время горения которого не превышает времени, необходимого для подхода основного датчика цели к преграде. После прогорания замедлителя последовательно срабатывают: инициирующий заряд, капсюль-детонатор, БЧ. Взрывчатое вещество трубки передаёт огневое воздействие на заряд ВГ.
В случае промаха ракеты по цели после прогорания пиротехнической запрессовки механизма самоликвидации срабатывает капсюль-детонатор и вызывает срабатывание боевой части ракеты. Ракета самоликвидируется.
ДВИГАТЕЛЬНАЯ УСТАНОВКА
Двигательная установка ракеты 9М39 предназначена для решения следующих задач:
• выброса ракеты из пусковой трубы;
• придания ракете необходимой угловой скорости вращения;
• разгона до маршевой скорости;
• поддержания маршевой скорости в полёте.
В состав двигательной установки входят:
1) стартовый двигатель;
2) маршевый двигатель;
3) лучевой воспламенитель замедленного действия.
Рис. 49. Двигательная установка
Двигательная установка представляет собой РДТТ (ракетный двигатель на твёрдом топливе) тандемного расположения. Сила, приводящая ракету в движение (тяга), получается в результате преобразования химической энергии твёрдого топлива при его сгорании в кинетическую энергию вытекающей реактивной струи. Преобразование осуществляется в устройстве, называемом сопловым блоком. Сопловые блоки стартового и маршевого двигателей выполнены раздельно и имеют различную конструкцию.
1. Стартовый двигатель предназначен для обеспечения вылета ракеты из пусковой трубы и придания ей необходимой угловой скорости вращения. Представляет собой РДТТ с многосопловым блоком и зарядом, имеющим увеличенную поверхность горения. Стартовый двигатель обеспечивает вылет ракеты из пусковой трубы на безопасное расстояние от стрелка-зенитчика и придание ракете вращения вследствие истекания продуктов горения топлива через сопла, расположенные под углом к продольной оси ракеты.
Таблица 7
Основные характеристики
| 1 | Вес двигателя, кг | 0,5 |
|---|---|---|
| в том числе вес заряда, кг | 0,124 | |
| 2 | Марка топлива | Быстрогорящий нитроглицерированный порох (гексаген, алюминиевая пудра, перхлорид аммония) |
| 3 | Номинальное время работы, с | 0,065 |
| 4 | Угол поворота сопел, мин | 6 |
| 5 | Круговая скорость вращения, об/с | 15–21 |
| 6 | Температура продуктов сгорания, К | 2700 |
| 7 | Давление внутри камеры сгорания, атм | 175 |
| 8 | Ускорение, g | 120 |
Стартовый двигатель состоит из камеры, изготовленной из высокопрочной легированной стали. В корпус уложен вкладной заряд, изготовленный из баллиститного состава. Заряд имеет увеличенную поверхность горения за счёт сформированных внутренних поверхностей. В корпусе заряд от продольных перемещений удерживается диском, представляющим собой упругий элемент с лапками, которые поджимаются при установке заряда в зависимости от его длины, и диафрагмой, которая при горении ещё и удерживает крупные части горящего заряда.
Сопловой блок ввернут в корпус на резьбе. Он имеет 6(7) сопел, расположенных под углом к продольной оси ракеты, и одно центральное сопло. За счёт косопоставленных сопел достигается вращение ракеты на начальном участке (при разгоне и вылете из трубы). Применение нескольких сопел обусловлено и требованиями по минимальным габаритам двигателя, особенно в продольном направлении. Винт, ввернутый в сопловой блок, носит чисто технологические функции и используется при проверках двигателя на герметичность.
Воспламенитель топлива двигателя вставлен и закреплён в отверстие со стороны дна. Он представляет собой узел, включающий электровоспламенитель и навеску пороха (собственно воспламенитель). В воспламенитель ввернута трубка, обеспечивающая передачу форса пламени от воспламенителя на пирозадержку маршевого двигателя.
Электрическая связь СД (точнее его электровоспламенителя) с пусковой трубой осуществляется через контактную связь колодки, расположенной с нижней стороны трубы в задней её части.
Для обеспечения герметичности камеры СД при эксплуатации и создания необходимого давления для воспламенения стартового заряда от воспламенителя в соплах установлены заглушки.

Рис. 50. Устройство стартового двигателя
Сборка осуществляется следующим образом: в корпусе устанавливается электровоспламенитель, затем измеряется длина заряда и регулируется высота диска, который устанавливается в корпус, после чего устанавливается заряд, диафрагма и сопловой блок. В воспламенитель вкручивается трубка. При установке в трубу СД стыкуется у сопловой части маршевого двигателя с выступающими элементами крыльевого блока с помощью разжимного кольца и втулок. При стыковке газоподводящая трубка надевается на корпус лучевого воспламенителя замедленного действия, расположенного в предсопловом объёме маршевого двигателя (МД). Контактная связь подсоединяется к колодке трубы.
2. Двухрежимный маршевый двигатель предназначен для разгона ракеты до маршевой скорости (1 режим) и поддержания этой скорости в полёте (2 режим). Представляет собой РДТТ на смесевом топливе с одним соплом. Заряды первого и второго режимов выполнены из одного топлива, но имеют разные поверхности горения. Заряд первого режима имеет наружную и внутреннюю поверхности горения, что обеспечивается наличием продольных канавок и прошивом его серебряными проволочками по всей длине для ускорения прогрева и сгорания. Заряд второго режима бронирован по наружной поверхности и открыт для горения с торцевой части, что обеспечивает равномерность его горения во время полёта ракеты.
Заряд смесевой, т. е. механическая смесь горючего и окислителя. Окислителем в заряде является перхлорат аммония, выделяющий при нагреве кислород. В качестве горючего применяют гексаген и алюминиевую пудру. Гексаген, кроме того, является хорошим взрывчатым веществом, имеющим высокую скорость детонации, тем самым обеспечивается возможность подрыва остатков топлива при срабатывании БЧ. Для обеспечения требуемого режима горения в заряд запрессованы четыре серебряные проволочки. Имея высокую теплопроводность, они осуществляют местный нагрев заряда, последний в этом месте горит быстрее, обеспечивая так называемое кратерное горение, приводящее к небольшому увеличению площади горения.
Таблица 8
Основные характеристики
| 1 | Вес двигателя, кг | 5,7 |
|---|---|---|
| в том числе вес заряда, кг | 4,51 | |
| 2 | Марка топлива | быстрогорящий нитроглицерированный порох (гексаген, алюминиевая пудра, перхлорид аммония) |
| 3 | Номинальное время работы, с | 8,5 |
| в том числе первого режима, с | 1,9 | |
| 4 | Температура продуктов сгорания, К | 3260 |
| 5 | Давление внутри камеры сгорания, атм | 168 |
Корпус двигателя представляет собой металлическую обечайку, получаемую из листа высокопрочной легированной стали путём раскатки. В хвостовой части обечайка имеет сужение и по форме напоминает бутылку с горлышком. Толщина стенок двигателя 2,5 мм, выбрана исходя из расчёта на прочность от воздействия внутреннего давления и внешних нагрузок. Внутренняя поверхность двигателя имеет теплозащитное покрытие толщиной до 10 мм. В передней части двигателя есть утолщение, являющееся опорной поверхностью ракеты при установке в трубе (? 72,2 мм).
Рис. 51. Устройство маршевого двигателя:
1 — воспламенитель маршевого заряда; 2 — маршевый заряд; 3 — крыльевой блок; 4 — лучевой воспламенитель замедленного действия; 5 — сопло; 6 — разжимное кольцо
Передняя часть двигателя закрыта титановым дном с элементами крепления к боевой части (бобышками). Дно вворачивается в корпус по резьбе.
В хвостовой части МД установлен сопловой блок с лучевым замедлителем и воспламенителем.
Для создания начального давления, способствующего воспламенению заряда, в сопловом блоке установлена заглушка, которая после начала работы МД разрушается.
Сопловой блок выполнен в виде составного узла. Часть деталей изготавливается из специального прессматериала, а та часть, в которой находится зона критики сопла, из графита. На внешней части соплового блока имеются отверстия для крепления крыльевого блока.
Сборка МД осуществляется следующим образом. В сопловой блок устанавливается лучевой воспламенитель замедленного действия, а в камеру ставят воспламенитель с заглушкой. Устанавливают сопловой блок, после чего в камеру вставляют заряд, который поджимают с помощью прокладок вворачиваемым днищем.
3. Лучевой воспламенитель замедленного действия предназначен для обеспечения срабатывания маршевого двигателя на безопасном расстоянии от стрелка-зенитчика. Представляет собой пиротехническое изделие, в которое запрессован заряд со временем горения 0,33–0,5 с. За это время ракета удаляется на расстояние до 5,5 м, что предохраняет стрелка-зенитчика от воздействия струи пороховых газов маршевого двигателя. Лучевой воспламенитель замедленного действия установлен в предсопловом объёме маршевого двигателя и обеспечивает передачу огневого импульса от стартового к маршевому двигателю.
Воспламенитель, как и в СД, представляет собой навеску из пороха, обеспечивающую воспламенение основного заряда.
ФУНКЦИОНИРОВАНИЕ ДВИГАТЕЛЬНОЙ УСТАНОВКИ
При переводе пускового крючка в крайнее положение с электронного блока ПМ через контакты колодки СД, расположенной на ПТ, на электровоспламенитель СД поступает электрический импульс и поджигает навеску пороха. При горении навески повышается давление в камере двигателя, и от воспламенителя загорается основной заряд, давление продолжает быстро нарастать, под его действием вскрываются сопла, и двигатель начинает разгонять и раскручивать ракету, придавая ей ускорение порядка 120g. Процесс разгона кратковременный, после чего двигатель тормозится и улавливается в специальном расширенном пространстве пусковой трубы.
После срабатывания СД форс пламени от его воспламенителя через трубку поджигает лучевой воспламенитель замедленного действия. Последний после сгорания своего заряда поджигает воспламенитель, от которого загорается основной заряд маршевого двигателя.
Для обеспечения безопасности стрелка-зенитчика МД начинает работать примерно через 0,4 с после вылета из трубы. Тем самым создаётся зона безопасности не менее 5,5 м, обеспечивающая минимальное воздействие газовой струи работающего двигателя на стрелка.
Основной заряд начинает гореть по всей открытой поверхности, площадь которой через 1,9 с из-за применения бронировки уменьшается. Соответственно меняется тяга двигателя (второй режим).
В случае если при попадании ракеты в цель в МД останется топливо, оно подрывается вместе с БЧ от детонационного импульса взрывного генератора.
Минимальное усилие отдачи при пуске не превышает 20 кг/С, что в два раза меньше, чем при стрельбе из винтовки калибра 7,62 мм. Продукты сгорания, действующие на оператора:
• пары соляной кислоты — 295 мг/м?;
• пары окиси углерода — 20 мг/м?;
• пары окиси азота — 15 мг/м?.
При пуске изделия частота пульса стрелка увеличивается на 30–40 ударов, артериальное давление возрастает на 30–40 мм рт. ст.
Следует отметить, что на практике реальное срабатывание обычно превышает 6 м, так как при проектировании закладывались предельные значения параметров, влияющих на параметры зоны безопасности (температура окружающей среды, параметры твердого топлива СД, вес ракеты, сила трения, действующая на ракету при ее движении в трубе, время работы пирозамедлителя, встречный ветровой поток), в жизни же совпадение всех этих параметров очень редко.
КОМПЛЕКСНОЕ ФУНКЦИОНИРОВАНИЕ БОРТОВОЙ АППАРАТУРЫ РАКЕТЫ ПРИ БОЕВОМ ПРИМЕНЕНИИ
Функционирование бортовой аппаратуры при подготовке ракеты к пуску
1. При приведении в действие с помощью механизма накола наземного источника питания на ракету выдается:
а) напряжение постоянного тока ±5 В и ±20 В — для питания электрических цепей;
б) сжатый азот — для охлаждения фоторезистора основного канала до –196 °C за 4,5 с и поддержания этой температуры в течение 14 с. Этим обеспечивается высокая чувствительность фотоприёмника к тепловому излучению поражаемых целей на фоне помех;
в) управляющее напряжение на катушки вращения гироскопа, формируемое датчиками положения пусковой трубы и блоком разгона пускового механизма, — для раскрутки ротора гироскопа до 100 об/с за время не более 5 с. Этим обеспечивается частота кругового сканирования цели в поле зрения объектива и проявление свойств гироскопа.
2. После раскрутки гироскопа автомат разарретирования и пуска (АРП) пускового механизма обеспечивает коммутацию цепей включения в работу системы стабилизации оборотов (ССО) и системы арретирования ротора гироскопа (САР):
а) ССО, сравнивая сигнал с катушки ГОН, характеризующий фактическую частоту вращения, с заданной частотой, формирует в катушках вращения импульсы тока, вызывающие притормаживание или доразгон ротора. Этим обеспечивается поддержание частоты сканирования цели в узкой полосе пропускания усилительно-преобразовательного тракта сигнала ошибки наведения ракеты.
б) САР, сравнивая сигнал с катушки пеленга, характеризующий отклонение оптической оси координатора от продольной оси ракеты (угол пеленга), с сигналом катушки заклона, задающим отклонение линии прицеливания от продольной оси ракеты на 10° вниз, формирует сигнал ошибки арретирования, который отрабатывается следящим приводом координатора до нуля. Этим обеспечивается принудительное совмещение оптической оси координатора линией прицеливания.
3. При прицеливании стрелок должен обеспечить удержание цели в узком поле зрения объектива (2°). При этом тепловое излучение поражаемых целей и ЛТЦ селектируется зеркально-линзовым объективом и раздельно фокусируется в виде пятен малого размера в фокальных плоскостях основного и вспомогательного спектральных каналов. Этим обеспечивается перенос информации о пространственном положении цели и ЛТЦ относительно оптической оси координатора (ошибки слежения) в фокальные плоскости объектива. Важно, что положение пятна в фокальной плоскости однозначно характеризует направление и величину ошибки слежения.
4. Благодаря тому, что диски модуляторов размещены в фокальных плоскостях объектива, вращаются относительно его оптической оси с частотой сканирования и имеют прозрачное окно специальной формы, происходит круговое сканирование положения пятен (а значит, цели и ЛТЦ) и импульсная модуляция их тепловых потоков информацией об ошибке слежения. Этим обеспечивается преобразование информации об ошибке слежения к виду, пригодному для считывания фотодетекторами.
5. Фотосопротивления основного и вспомогательного каналов преобразуют модулированные тепловые потоки цели и ЛТЦ в синхронные импульсные электрические сигналы постоянного тока. Причём в длительности импульса содержится информация о величине, а во временном положении импульса в периоде сканирования — о направлении ошибки слежения за целью. За начало отсчёта периода сканирования условно принято направления вверх.
6. Предварительные усилители фотоприёмника, охваченные автоматической регулировкой усиления, преобразуют сигналы постоянного тока в цепи фотосопротивлений в периодические сигналы переменного тока требуемого уровня, содержащие в себе первые гармоники частоты сканирования. Причём амплитуда сигналов частоты сканирования несёт информацию о величине, а фаза — о направлении ошибки слежения за целью и ЛТЦ.
7. Использование в ПЗРК «Игла» двухканального фотоприёмника обеспечивает в условиях отстрела противником ЛТЦ (с интервалом до 0,3 с и превышением мощности излучения до 6 раз) автоматическую, с помощью схемы переключения, временную селекцию в периоде сканирования только сигналов истинных целей и повышение вероятности их поражения до 0,31 на встречных курсах и до 0,24 вдогон. Селекция может быть отключена нажатием кнопки «СЕЛЕКТОР» на пусковом механизме. Сигнал цели с выхода схемы переключения поступает в обнаружитель цели автомата разарретирования и пуска пускового механизма и через избирательный усилитель, амплитудный детектор, фазовращатель и «дежурит» на входе усилителя коррекции следящей системы координатора.
8. При установке пускового крючка в положении «РР» АРП при заданном превышении сигналом цели сигнала фона разрешает разарретирование (отключает от следящего привода координатора сигнал ошибки арретирования и подключает сигнал ошибки слежения за целью). При этом сигнал ошибки слежения усиливается по мощности в усилителе коррекции и запитывает катушки коррекции. Катушки коррекции, взаимодействуя с полем постоянного магнита ротора гироскопа, создают электромагнитный момент, заставляющий прецессировать координатор в сторону уменьшения ошибки слежения. Таким образом, следящий координатор захватывает и начинает автоматически сопровождать цель, определяя угловую скорость линии визирования (ошибку наведения ракеты). Далее, в течение 0,8 с, АРП поэтапно оценивает параметры сигнала цели и, при положительном результате анализа, включает световую и звуковую сигнализацию, разрешающую пуск. Прерывистая сигнализация свидетельствует о недостаточном качестве сигнала цели и периодическом арретировании координатора для перезахвата цели.
Функционирование бортовой аппаратуры ракеты при пуске и в полёте
1. При наличии постоянной световой и звуковой сигнализации и переводе пускового крючка в положение «РП» (разрешение пуска) АРП сформирует электрическую команду «ПУСК», которая через блок реле пускового механизма поступает:
а) на электровоспламенитель порохового аккумулятора давления (ПАД), вызывая последовательное воспламенение навески пороха, пиротехнической петарды и порохового заряда. Образующиеся пороховые газы очищаются фильтром и подаются на рулевую машину и турбину бортового источника питания (БИП). Вырабатываемое БИП напряжение питания «дежурит» на контактах размыкателя блока взведения;
б) зарядку конденсаторов блока взведения, исключающих перерыв в питании при переходе питания с НИП на БИП;
в) через 0,72 с (время выхода БИП на режим) на электровоспламенитель стартового двигателя, который воспламеняет навеску пороха.
2. При загорании навески пороха воспламеняется основной заряд стартового двигателя и лучевой воспламенитель маршевого двигателя.
Стартовый двигатель создает реактивную тягу, обеспечивающую ускорение ракеты до 120g, скорость вылета из трубы около 30 м/с и скорость вращения около 20 об/с. Отработавший СД улавливается в пусковой трубе.
Лучевой воспламенитель обеспечит воспламенение заряда маршевого двигателя примерно через 0,4 с после вылета из трубы и безопасность стрелка (ракета удалится на 5,5 м).
Маршевый однокамерный двухрежимный двигатель обеспечивает разгон ракеты до крейсерской скорости (до 570 м/с) и поддержание её в полете.
3. С началом движения ракеты по трубе механизм бортразъёма обеспечит отстыковку вилки бортразъёма, а с выходом ракеты из трубы раскрываются рули (а также крылья и дестабилизаторы). При этом замыкаются контакты размыкателя блока взведения, обеспечивая подачу напряжения с БИП:
а) на электровоспламенитель предохранительно-детонирующего устройства (ПДУ), от которого загораются пиропредохранитель ПДУ и пирозапресовка механизма самоликвидации. Под действием осевого ускорения блокирующий стопор оседает (снятие I ступени предохранения), а через 1–1,9 с прогорает пиропредохранитель, разрешающий поворотной втулке с капсюлем-детонатором установиться в боевое положение (снятие II ступени);
б) через контакты поворотной втулки на зарядку конденсаторов С1, С2 боевой цепи — взрыватель готов к срабатыванию;
в) на электровоспламенитель порохового управляющего двигателя, от которого загораются навеска пороха, петарда и пороховой заряд. Пороховые газы через газораспределительную втулку рулевой машины поступают в сопла, обеспечивая на начальном участке полёта дополнительное газодинамическое управление по командам автопилота.
4. Автопилот формирует команды управления полётом:
а) сигнал ошибки наведения ракеты, пропорциональный угловой скорости линии визирования, с выхода усилителя коррекции следящего координатора цели через синхронный фильтр и динамический ограничитель поступает на первый вход сумматора ?I. Информация о величине и плоскости ошибки наведения содержится, соответственно, в амплитуде и фазе сигнала с частотой сканирования цели;
б) на второй вход сумматора ?I поступает сигнал со схемы ФСУРа по пеленгу, обеспечивающий ускоренный вывод ракеты на кинематическую траекторию;
в) фазовый детектор, используя в качестве опорного сигнал ГОН, переносит информацию об ошибке наведения с частоты сканирования f2 (100 Гц) на частоту управления рулями f3 (20 Гц). При этом синусоидальный сигнал частоты f3 несёт в себе информацию о том, в какую сторону (фаза сигнала) и насколько (амплитуда сигнала) в любой момент периода управления нужно отклонить вращающиеся рули, чтобы создаваемая ими управляющая сила непрерывно уменьшала ошибку наведения;
г) схема линеаризации обеспечивает сохранение линейной зависимости величины управляющей силы от величины ошибки наведения при релейном режиме работы рулей. Благодаря ей формируется суммарный управляющий сигнал, задающий переброс рулей из одного крайнего положения в другое (±15°) четыре раза за период управления и на разное время;
д) с помощью усилителя-ограничителя и усилителя мощности суммарный управляющий сигнал преобразуется в импульсное двухполярное напряжение управления электромагнитами рулевой машины;
е) для гашения поперечных колебаний корпуса ракеты используется сигнал отрицательной динамической обратной связи с датчика угловых скоростей, подаваемый на усилитель-ограничитель.
5. Под действием напряжений управления полётом, формируемых автопилотом, поочерёдно срабатывают электромагниты золотника рулевой машины, обеспечивая подачу газов ПАД в полости рабочего цилиндра и соответствующее перемещение рулей.
6. Рули создают аэродинамическую управляющую силу, удерживающую ракету на кинематической траектории полёта в учрежденную точку встречи с целью.
7. Для повышения эффективности наведения в ОГС предусмотрены схема ближней зоны и схема смещения, обеспечивающие на конечном участке полёта слежение за энергетическим максимумом излучения цели (соплом) и смещение траектории от сопла в корпус.
8. При попадании ракеты в цель:
а) в момент прохождения взрывателя через металлическую преграду или вдоль неё основной датчик цели ГМД1 выдает импульс тока, от которого последовательно сработают ЭВ3, капсюль-детонатор, детонатор взрывателя, детонатор и разрывной заряд боевой части, а через трубку и взрывной генератор и остатки топлива МД;
б) под действием волн упругих деформаций срабатывает дублирующий датчик ГМД2, электрический импульс которого вызывает срабатывание с задержкой инициирующего заряда и далее подрыв БЧ (если подрыв еще не произошел).
9. При промахе механизм самоликвидации уничтожит ракету.
1.2.2. Пусковая труба 9П39
Пусковая труба 9П39 предназначена для обеспечения прицельного и безопасного пуска ракеты, а также для улавливания стартового двигателя. Представляет собой контейнер специальной формы.
Устройство пусковой трубы обеспечивает выполнение следующих функций:
1) транспортировка, переноска и защита ракеты от механических повреждений и атмосферного воздействия в процессе эксплуатации;
2) стопорение ракеты в походном положении;
3) приведение в действие НИП;
4) подача хладагента в фотоприёмник ОГС;
5) коммутация электрических цепей ракеты при боевом применении и проверках;
6) прицеливание и световая индикация захвата цели;
7) обеспечение раскрутки и заклона ротора гироскопа ОГС;
 направленный пуск ракеты;
направленный пуск ракеты;
9) улавливание отработавшего стартового двигателя.
Таблица 9
Технические характеристики
| 1 | Длина, мм | 1699 |
| 2 | Диаметр внутренней поверхности, мм | 72,2 |
| 3 | Масса, кг | 3,1 |
| 4 | Запас прочности | 5 пусков |
Состав пусковой трубы:
1) цилиндрический контейнер;
2) блок датчиков;
3) механический прицел;
4) гнездо наземного источника питания;
5) трубка подачи азота к ОГС;
6) механизм бортразъёма;
7) устройство стыковки пускового механизма с пусковой трубой;
колодка стартового двигателя;
9) обоймы крепления плечевого ремня;
10) кнопка «ВДОГОН».
Рис. 52. Устройство пусковой трубы
УСТРОЙСТВО И ФУНКЦИОНИРОВАНИЕ ЭЛЕМЕНТОВ ПУСКОВОЙ ТРУБЫ
1. Цилиндрический контейнер изготовлен из стеклоткани и эпоксидной смолы.
В его переднюю часть вмонтирован пластмассовый корпус блока датчиков с раструбом. Раструб обеспечивает:
• защиту аэродинамического насадка ракеты от механических повреждений;
• защиту ракеты от влаги и пыли благодаря резиновой манжете;
• защиту ОГС от боковых засветок;
• отсутствие затенения объектива при заклоне на 10° вниз благодаря впадине в нижней части;
• улавливание стартового двигателя благодаря кольцевой канавке, в которую западает пружинное кольцо фиксирующей втулки;
• установку передней крышки.

Рис. 53. Внешний вид раструба
Передняя крышка представляет собой пластмассовую деталь с металлическим кольцом, резиновой манжетой и замком. Металлическое кольцо, взаимодействуя с постоянным магнитом ротора гироскопа, обеспечивает транспортное арретирование с нулевым углом пеленга.
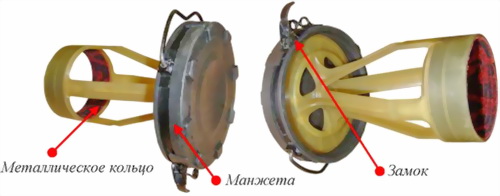
Рис. 54. Внешний вид передней крышки
В заднюю часть цилиндрического контейнера вмонтировано кольцо для крепления задней крышки. Задняя крышка — резиновая манжета с замком. Крышки снимаются перед боевым применением комплекса. Метки служат для ориентации замков крышек при их установке.
2. В корпусе блока датчиков, залитом пенополиуретаном, размещены:
• приёмно-передающая антенна наземного радиолокационного запросчика, обеспечивающая излучение кодированных радиосигналов запроса цели и приём кодированных радиосигналов ответа «Я свой самолёт»;
• кольцевые магнитопроводы и катушки датчиков положения, обеспечивающие коммутацию катушек вращения при раскрутке гироскопа;
• катушки заклона, задающие при арретировании гироскопа его заклон на 10° вниз и обеспечивающие тем самым соответствующий угол возвышения траектории при пуске ракеты для исключения удара ракеты о землю при вылете из трубы;
• электрические цепи от блока датчиков до разъёма пускового механизма, проложены под пластмассовой крышкой на наружной поверхности контейнера (снизу).
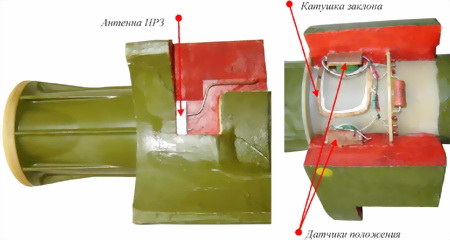
Рис. 55. Блок датчиков
3. Механический прицел состоит из передней стойки с мушкой, задней стойки с целиком, лампы световой индикации и диафрагмы.
Стойки в походном положении сложены, а в боевом — откинуты и удерживаются пружинами.
Прицел обеспечивает:
• заклон линии прицеливания на 10° вниз;
• прицеливание и удержание цели в поле зрения ОГС;
• оценку дальности до цели;
• индикацию захвата цели ОГС;
• исключение ослепления стрелка лампой индикации в сумерках.

Рис. 56. Механический прицел
Заклон линии прицеливания относительно продольной оси ракеты достигается соответствующим размещением на контейнере мушки и целика. Юстировка (совмещение) линии прицела и оптической оси ОГС осуществляется на заводе-изготовителе с помощью специального приспособления и регулировочных винтов положения мушки.
При прицеливании стрелок, сориентировав правый глаз относительно треугольной метки, должен стремиться удерживать цель на линии, соединяющей центры отверстий целика и мушки.
Цель будет находиться в зоне пуска, если её видимый стрелком размер не менее половины размера отверстия мушки.
Загорание лампы световой индикации свидетельствует о захвате и сопровождении цели ОГС и разрешении пуска ракеты. Мигание лампы свидетельствует о недостаточном уровне теплового сигнала цели и периодическом арретировании ОГС для попытки перезахвата цели.
Для исключения ослепления стрелка лампой индикации в сумерках предусмотрена поворотная затемняющая диафрагма.
4. Гнездо НИП состоит из следующих элементов:
• цилиндрической обоймы с направляющим пазом и отверстием подачи азота в трубку ОГС;
• фиксатора НИП;
• пятиконтактной платы электроразъёма НИП.
Гнездо обеспечивает электрические и газовые связи НИП с другими элементами комплекса.

Рис. 57. Гнездо НИП
При установке НИП в гнездо необходимо, сориентировав штифт на штуцере НИП по направляющему пазу гнезда, вставить штуцер НИП в отверстие обоймы до выхода фиксатора из утопленного состояния. При снятии НИП фиксатор утопить до упора, нажав на него.
5. Трубка подачи азота к ОГС состоит:
• из фильтра;
• штуцера с манжетой и двумя крепёжными винтами;
• трубки из нержавеющей стали;
• стального ножа с резиновым амортизатором;
• накидной гайки с манжетой;
• съёмной крышки.
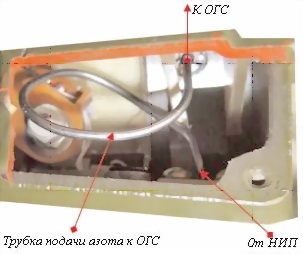
Рис. 58. Трубка подачи азота к ОГС
Трубку устанавливают на заводе-изготовителе (в том числе для повторного использования трубы). При этом:
1) в отверстие обоймы гнезда НИП последовательно вставляются фильтр, манжета, штуцер трубки и закрепляются двумя винтами;
2) другой конец трубки с ножом и амортизатором с помощью накидной гайки подстыковывается к ОГС;
3) трубка закрывается пластмассовой крышкой.
Амортизатор исключает случайное срезание трубки. При старте ракеты трубка срезается с помощью ножа.
6. Механизм бортового разъёма состоит:
• из механизма накола:
— откидная фиксируемая ручка;
— поворотный рычаг;
— перемещаемая рычагом тяга с пружиной;
— боек накола мембраны баллона НИП;
• механизма бортового разъёма:
— вилка с направляющими штырями и штыревыми контактами;
— направляющие разъёма;
— клиновой пружинный толкатель, связанный с тягой;
— контрольный разъём;
• механизма стопора ракеты:
— цилиндрическая направляющая стопора;
— стопор с косыми поверхностями;
— рабочая пружина стопора;
— отверстие для стопора в бугеле боевой части ракеты.
Механизм бортового разъёма обеспечивает:
• вскрытие баллона НИП;
• подстыковку бортразъёма к ракете и его отстыковку при старте;
• подстыковку контрольного разъёма, используемого при проверках ракеты;
• стопорение ракеты в трубе в боевом и походном положении.

Рис. 59. Устройство механизма бортового разъёма
При подготовке комплекса к стрельбе стрелок должен оттянуть ручку на себя (для сжатия внутренней пружины стопора), откинуть её на 90° и зафиксировать. Затем резко перевести рычаг из положения «ИСХОД.» в положение «НАКОЛ» (на 180° на себя). При повороте рычага его профилированная ось будет перемещать тягу вначале вперёд, а в конце немного назад, сжимая рабочую пружину.
При этом:
• тяга передней частью давит на боёк, накалывает мембрану баллона НИП и открывает доступ азоту в батарею и трубку к ОГС;
• клиновой пружинный толкатель тяги давит на вилку бортразъёма и подстыковывает её к розетке ракеты;
• задняя часть тяги давит на косую поверхность стопора и утапливает его до совмещения начала скоса с внутренней поверхностью трубы. (Поэтому трубу с ракетой нельзя наклонять вниз более чем на 10°, т. к. ракета удерживается только силами трения и рабочей пружины стопора.)
С началом движением ракеты по трубе:
• вилка бортразъёма, двигаясь по косым направляющим, выходит из контакта с розеткой ракеты;
• бугель БЧ ракеты давит на скос стопора и полностью утапливает его.
7. Устройство стыковки пускового механизма с пусковой трубой состоит:
• из проушины с пазом;
• розетки электроразъёма;
• фиксатора;
• крышки с пластинчатой пружиной.
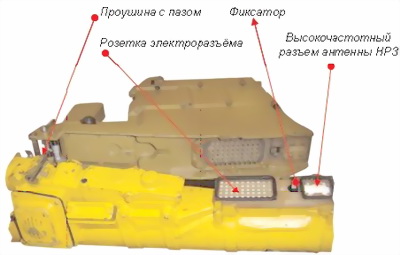
Рис. 60. Устройство стыковки пускового механизма с пусковой трубой
Для стыковки ПМ с ПТ необходимо сдвинуть вниз пружину, снять крышку электроразъёма, вставить профилированную ось ПМ в паз проушины, легким ударом ладони по корпусу ПМ добиться зацепления фиксатора трубы со стопором ПМ.
8. К колодке стартового двигателя подсоединяются винтами и пропаиваются два провода запальной цепи и провод их экрана.
9. Обоймы обеспечивают крепление плечевого ремня. Плечевой ремень предназначен для переноски комплекса за спиной стрелка в походном положении.
10. При нажатии кнопки «ВДОГОН» схема ФСУРа по пеленгу автопилота ракеты обеспечит на начальном участке полёта ускоренный разворот траектории в направлении упреждённой точки встречи при стрельбе вдогон.

Рис. 61. Колодка стартового двигателя
1.2.3. Наземный источник питания 9Б238
Наземный источник питания 9Б238 предназначен для снабжения сжатым азотом ОГС ракеты и обеспечения комплекса электроэнергией в период подготовки ракеты к пуску.
Таблица 10
Основные технические характеристики
| 1 | Время выхода на режим, с | |
|---|---|---|
| в интервале температур: от –20 до +50 °C | 1 | |
| от –20 до –50 °C | 1,3 | |
| 2 | Время работы, с | не менее 30 |
| 3 | Масса, кг | 1,3 |
| в том числе батарея | 0,46 | |
| 4 | Рабочее давление в баллоне хладагента, кгс/см?: | |
| при нормальной температуре (+20 °C) | 350 | |
| максимально допустимое значение (+50 °C) | 410 | |
| 5 | Точка росы хладагента (азота) при р = 150 кгс/см? | не выше –65 °C |
| 6 | Выдаваемое напряжение | +20 В ±2,5 В |
| — 20 В ±2,5 В | ||
| +5 В ±0,5 В |
Состав НИП:
1) баллон со сжатым азотом;
2) аккумуляторная батарея с твёрдым электролитом.
Устройство элементов НИП
1. Баллон со сжатым азотом предназначен для длительного хранения сжатого азота. Представляет собой сферу, изготовленную из двух половин, сваренных между собой. Материал — высокопрочная сталь. Толщина стенок — 2мм, объём баллона — 350 см?.
В полости баллона установлен стержень, предназначенный для крепления батареи к баллону, установки штуцеров, обеспечения вскрытия батареи, обеспечения заправки азотом и подачи азота из баллона.
С одной стороны в стержень вставлен боёк, зафиксированный от перемещения штифтом, а сверху навинчена батарея с капсюлем-воспламенителем.
С другой стороны в стержень ввёрнут штуцер с мембраной, закрывающей полость баллона. Сверху на стержень навёрнут другой штуцер с разъёмом и бойком. Боёк подпружинен и закрыт колпачком. Разъём — пластмассовая деталь с запрессованными штырями, к которым припаиваются провода от батареи.
2. Батарея с твёрдым электролитом. Состоит из электрохимических элементов, соединённых в смешанную последовательно-параллельную цепь. Между элементами располагаются пиротехнические нагреватели, а в задней части, присоединяемой к баллону, установлен капсюль-воспламенитель.
Электрохимический элемент (ЭХЭ) представляет собой массу сульфата свинца (PbSO4) с добавлением хлористого лития (LiCl) и хлористого калия (KCl), нанесённую на никелевую сетку, являющуюся положительным электродом батарей. Отрицательным электродом служат металлические кальций или магний, электролитом — расплав солей LiCl и KCl, нанесённый на стеклоткань.
Рис. 62. Устройство наземного источника питания
Пиронагреватель представляет собой плоскую шайбу из электроизоляционного асбеста, с одной стороны которого нанесён пиротехнический состав. Сверху на НИП надета резиновая оболочка.
ФУНКЦИОНИРОВАНИЕ НИП
Приведение НИП в действие осуществляется поворотом рычага механизма накола пусковой трубы и надавливанием на боёк. При его перемещении прокалывается мембрана баллона с азотом, и газ поступает через канал «В» в штуцер и далее по газовой трубке пусковой трубы к холодильнику ОГС. (При этом в специально ослабленном месте разрывается манжета и своими краями уплотняет зазор между штуцером баллона и внутренней поверхностью отверстия трубы.) Одновременно через канал «Г» газ поступает к бойку, который под действием давления срезает удерживающий штифт, перемещается с большой скоростью и накалывает капсюль-воспламенитель батареи.
Возникающий при этом форс пламени воспламеняет все пиротехнические нагреватели. Выделяемое при их горении тепло (480–700 °C) расплавляет электролит твёрдых электрохимических элементов, батарея приходит в рабочее состояние. Выводы батареи соединены проводниками с контактами разъёма, который служит для электрической связи с ПТ.
1.2.4. Пусковой механизм 9П516–1
Пусковой механизм предназначен для подготовки к пуску и пуска ракеты.
Таблица 11
Основные технические характеристики
| 1 | Масса, кг | 3 (9П516 — 1,9) |
| 2 | Гарантийный ресурс ПМ, пусков | 750 |
| 3 | Время готовности НРЗ, с | 3,5 |
| 4 | Максимальная дальность опознавания НРЗ, км | 5 ± 0,2 |
| 5 | Минимальная высота опознавания НРЗ, м | 10 |
| 6 | Время опознавания цели, с | 0,3 |
| 7 | Разрешающая способность по азимуту, град. | 20–25 |
| 8 | Разрешающая способность по углу места, град. | 70 |
| 9 | Диапазон рабочих температур, °С | от –50 до +50 |
Состав пускового механизма:
1) корпус;
2) электронный блок;
3) пусковой крючок с контактной группой;
4) вилка разъёма;
5) телефон;
6) кнопка «СЕЛЕКТОР»;
7) ось;
стопорное устройство;
9) наземный радиолокационный запросчик 1Л14.

Рис. 63. Устройство пускового механизма
1. В корпусе пускового механизма установлены: электронный блок, пусковой крючок с контактной группой, вилка разъёма, телефон, кнопка «СЕЛЕКТОР», ось, стопорное устройство. К крышке корпуса снизу крепится НРЗ.
2. Электронный блок ПМ предназначен для выполнения следующих функций:
• разгона ротора гироскопа ОГС;
• автоматического арретирования и разарретирования гироскопа;
• обработки и оценки сигналов информации и коррекции, поступающих с ОГС;
• формирования сигналов звуковой и световой информации при наличии цели в поле зрения ОГС;
• подачи напряжений на пусковые устройства.
Электронный блок состоит:
а) из блока разгона и синхронизации;
б) автомата разарретирования и пуска (АРП):
• обнаружителя цели;
• блока сигнала коррекции;
• блока логики;
в) блока реле.
Блок разгона и синхронизации совместно с блоком датчиков трубы и катушками вращения ОГС осуществляет разгон ротора гироскопа до требуемой частоты вращения (100 об/с) и отключение разгонного устройства при достижении этой частоты.
Автомат разарретирования и пуска предназначен для выполнения следующих функций:
• автоматического арретирования и разарретирования ротора гироскопа ОГС;
• формирования звукового и светового сигналов информации при наличии цели в поле зрения ОГС;
• анализа сигнала от цели после разарретирования гироскопа;
• автоматического включения блока реле.
Принцип действия АРП основан на поэтапном анализе четырех параметров сигнала от цели в течение 0,8 с. Длительность каждого этапа равна 0,2 с.
Во время анализа АРП оценивает:
• величину сигнала коррекции, который характеризует угловую скорость линии визирования ракета-цель. Эта угловая скорость не должна превышать 12°/с, в противном случае АРП запрещает пуск ракеты. Ограничение по максимальному значению угловой скорости выбрано исходя из аэродинамических возможностей ракеты;
• превышение сигналом цели сигнала фона более чем в 4 раза;
• угол между оптической осью гироскопа и продольной осью прицела трубы, который не должен превышать 2°(при точном совмещении оси прицела с линией визирования ракета-цель);
• информацию НРЗ, по которой определяется принадлежность цели.
После разгона ротора АРП обеспечивает арретирование гироскопа, при этом его оптическая ось совмещается с осью прицела. При совмещении оси прицела трубы с целью цель будет находиться в поле зрения ОГС, с выхода которой на вход АРП будет поступать сигнал от цели.
АРП может работать как в автоматическом, так и в ручном режимах, переключение которых осуществляется пусковым крючком.
Для работы АРП в автоматическом режиме необходимо за время менее 0,6 с перевести пусковой крючок из исходного положения до упора, при этом происходит разарретирование ротора гироскопа, и при наличии цели в поле зрения ОГС появляются сигналы звуковой и световой информации. В течение 0,8 с после разарретирования ротора гироскопа ОГС осуществляет поэтапный анализ сигнала от цели.
Если в течение 0,8 с сигнал от цели превышает сигнал фона, ОГС отслеживает цель, угловая скорость линии визирования ракета-цель не превышает 12°/с, угол между оптической осью гироскопа и осью прицела меньше 2° (при точном совмещении оси прицела с линией визирования ракета-цель), с НРЗ не поступает информация, что цель «своя», то срабатывает АРП. При этом напряжение подается на блок реле, а с него на электровоспламенитель ПАД, блок взведения и электровоспламенитель стартового двигателя.
Если излучение от цели не превышает сигнала от фона, то ротор гироскопа периодически арретируется, лампа световой информации на трубе мигает. Это свидетельствует о недостаточной величине излучения от цели для слежения ОГС. Режим периодического арретирования ОГС необходим для осуществления перезахвата цели.
Если угловая скорость линии визирования ракета-цель больше 12°/с, АРП задерживает пуск ракеты до тех пор, пока угловая скорость цели не уменьшится до 12°/с. Для обеспечения работы АРП в режиме «РУЧНОЙ» необходимо перевести пусковой крючок из исходного положения в среднее и задержать его в этом положении не менее 0,6 с, а затем перевести в положение до упора.
Блок реле предназначен для подачи напряжений по команде с АРП в пусковые цепи ПАД, стартового двигателя и блока взведения.
3. Пусковой крючок с контактной группой предназначен для замыкания электрических цепей контактной группы. При нажатии он поворачивается вокруг оси, на которой установлена пружина, обеспечивающая возврат крючка в исходное положение.
Пусковой крючок может находиться в одном из трёх положений:
• исходном (АР — арретир);
• среднем (РР — разрешение разарретирования);
• до упора (РП — разрешение пуска).
При переводе пускового крючка из исходного положения в среднее шток под воздействием скоса крючка перемещается в осевом направлении и нажимает на кулачок контактной группы, осуществляющей коммутацию электрических цепей на разрешение разарретирования ротора гироскопа ОГС.
При переводе пускового крючка из среднего положения до упора происходит дальнейшее перемещение штока скосом, вследствие чего замыкаются контакты, осуществляющие коммутацию электрических цепей электронного блока ПМ с электровоспламенителем ПАД и стартового двигателя с блоком взведения. При этом стопор под действием пружины западает в прорезь крючка и удерживает его в положении до упора.
Рычаг сброса предназначен для возврата пускового крючка в исходное положение. При повороте рычага сброса стопор выходит из прорези и пусковой крючок под действием пружины возвращается в исходное положение, при этом размыкаются контакты контактной группы.
Блокировка пускового крючка в исходном положении при нахождении рычага механизма накола в положении «ИСХОД.», а также блокировка рычага механизма накола в положении «НАКОЛ» при нахождении пускового крючка в положении до упора обеспечиваются блокировочным выступом.
При переводе рычага механизма накола в положение «НАКОЛ» вырез оказывается против блокировочного выступа, в результате чего снимается блокировка пускового крючка в исходном положении.
4. Вилка разъёма предназначена для электрической связи ПМ с трубой. В транспортном или походном положении комплекса без подстыковки пускового механизма к пусковой трубе она закрыта крышкой. Крышка снимается при нажатии на фиксатор.
5. Телефон предназначен для подачи звуковой информации о захвате цели ОГС. Он закреплён в корпусе ПМ крышкой и винтами. Для защиты от механических повреждений, пыли и влаги под крышкой установлены мембрана и прокладка.
6. Кнопка «СЕЛЕКТОР» предназначена для отключения селектора ОГС (при необходимости, согласно Правилам стрельбы и боевой работы).
7. Ось и 8. Стопорное устройство служат для стыковки ПМ с трубой и его стопорения. Фиксатор трубы входит в отверстие корпуса ПМ и запирается зубом стопора под действием пружины. Кроме этого, стопорное устройство совместно с профильным пазом обеспечивают фиксацию крышки вилки разъёма.
9. НРЗ предназначен для блокировки пуска ракеты по цели, отвечающей кодом «свой». Он выполнен в виде отдельного блока. В корпусе НРЗ (с левой стороны) установлен светодиод, светящийся при наличии неисправности НРЗ. Под крышкой расположены переключатели кодов АМИ/ГИ, устанавливаемые в положения согласно действующему расписанию. В случае необходимости работы без НРЗ на корпусе ПМ установлен закрытый крышкой тумблер, предназначенный для отключения НРЗ. Включённому состоянию НРЗ соответствует установка тумблера в верхнее положение «ВКЛ.», которое указано на корпусе ПМ.
1.2.5. Взаимодействие боевых средств при стрельбе
Для стрельбы комплекс переводится в боевое положение. При этом:
1) снаряженная ракета находится в пусковой трубе;
2) к пусковой трубе пристыкованы наземный источник питания и пусковой механизм, прицельные стойки подняты, передняя и задняя крышки сняты, плечевой ремень находится с правой стороны, рычаг механизма накола находится в положении «ИСХОДН.», а ручка рычага установлена и зафиксирована под углом 90° к рычагу;
3) на пусковом механизме пусковой крючок находится в исходном положении АР, введён код сигнала запроса, тумблер 1Л14 в положении «ВКЛ.»;
4) боевые средства комплекса находятся на правом плече стрелка-зенитчика, который ведёт оценку обстановки и поиск цели, а при её обнаружении оценивает тип, скорость, высоту, курсовой параметр, зону пуска и определяет режим (ручной/автоматический), вид (навстречу/вдогон, с селектором/без, с НРЗ/без) и момент пуска ракеты.
Подготовку комплекса к пуску и пуск ракеты можно разделить на несколько этапов.
I ЭТАП — выдача наземного питания
При принятии решения на обстрел цели стрелок переводит рычаг механизма накола в положение «НАКОЛ» (поворачивает рычаг за ручку на 180° по часовой стрелке).
При этом:
1) механизм бортразъема обеспечит:
а) подстыковку вилки бортразъёма к розетке ракеты;
б) перевод стопора ракеты в положение, позволяющее её движение вперёд;
в) надавливание на боёк мембраны и вскрытие баллона наземного источника питания;
2) сжатый азот из баллона поступит:
а) по трубке в микрохолодильник фотоприёмника ОГС, обеспечивая его охлаждение до –196 °C за 4,5 с;
б) в канал бойка батареи, обеспечивая удар по капсюлю-детонатору и воспламенение пиронагревателей электролита;
3) за время, не превышающее 1 с, батарея перейдёт в рабочее состояние и обеспечит ±20 В и +5 В электропитания боевых средств.
II ЭТАП — раскрутка, стабилизация оборотов и арретирование гироскопа
С выдачей электропитания:
1. Датчики положения ротора гироскопа, размещённые в пусковой трубе, и блок разгона автомата разарретирования и пуска (АРП) пускового механизма формируют в статорных катушках вращения гироскопа сигналы электрического тока, возбуждающие вращающееся магнитное поле, которое, взаимодействуя с постоянным магнитом ротора, раскручивает его за 5 с до 100 об/с. Этим обеспечивается частота кругового сканирования цели в поле зрения объектива и проявление свойства прецессии гироскопа.
2. После раскрутки гироскопа АРП обеспечивает включение в работу систем стабилизации оборотов (ССО) и арретирования ротора (САР) гироскопа:
А. ССО, сравнивая с помощью частотомера сигнал с катушки ГОН, характеризующий фактическую частоту вращения, с сигналом заданной частоты, формирует в катушках вращения импульсы тока определённой величины и полярности, возбуждающие магнитное поле, притормаживающее или ускоряющее вращение ротора. Этим обеспечивается поддержание частоты сканирования цели в узкой полосе пропускания усилительно-преобразовательного тракта сигнала ошибки наведения ракеты.
Б. САР, сравнивая сигнал с катушки пеленга, характеризующий отклонение оптической оси координатора от продольной оси ракеты (угол пеленга), с сигналом катушки заклона, задающим отклонения линии прицеливания от продольной оси ракеты на 10° вниз, формирует сигнал ошибки арретирования, которая отрабатывается следящим приводом координатора до нуля. Этим обеспечивается принудительное совмещение оптической оси координатора с линией прицеливания прицела.
III ЭТАП — прицеливание и захват цели
Для прицеливания правый глаз стрелка должен находится в районе треугольной метки Д на трубе, а стрелок должен стремиться удерживать цель на линии, проходящей через центры отверстий целика и мушки. Этим обеспечивается захват цели узким полем зрения координатора, селекция и формирование им электрического сигнала истинной цели, несущего информацию о превышении сигналом цели сигнала фона и об ошибке слежения координатора.
Причём при пусках по цели в условиях отсутствия ЛТЦ в весенне-летний период на фоне кучевой облачности, ярко подсвеченной солнцем, а также по малоизлучающим целям типа ДПЛА необходимо отключить селекцию кнопкой «СЕЛЕКТОР» на пусковом механизме, т. к. в этой обстановке сигналы на выходе основного и вспомогательного каналов координатора могут быть равны, и их отношение Ивк/Иок ? 1 воспринимается логикой селекции как отсутствие цели и не позволяет автосопровождение.
IV ЭТАП — переход на автосопровождение, анализ параметров цели и разрешение пуска
Начало и продолжительность этого этапа зависят от обстановки и принятого стрелком решения о способе пуска.
Решение о способе пуска стрелок последовательно реализует:
• кнопкой «СЕЛЕКТОР» (основной режим — с включённым селектором);
• кнопкой «ВДОГОН» (основной режим — навстречу);
• тумблером 1Л14 (основной режим — с использованием НРЗ);
• пусковым крючком ПМ (основной режим — автоматический).
Таблица 12
Особенности реализации различных режимов стрельбы
| Условия пуска | Продолжительность этапа ?T | Начало этапа | |||
|---|---|---|---|---|---|
| Помеховая обстановка | Вид пуска | Режим пуска | Необходимость запроса (НРЗ) | ||
| Селектор ВКЛ. | Навстречу | Автомат | ВКЛ. | 0,8 с | За ?T + 1 с до входа в зону пуска |
| ВЫКЛ. | |||||
| Ручной | ВКЛ. | от 0,6 до 30 с (ресурс НИП) | |||
| ВЫКЛ. | |||||
| Вдогон | Автомат | ВКЛ. | 0,8 с | За ?T + 1 с до прохождения целью параметра | |
| ВЫКЛ. | |||||
| Ручной | ВКЛ. | от 0,6 до 30 с | |||
| ВЫКЛ. | |||||
| Селектор ВЫКЛ. | Навстречу | Автомат | ВКЛ. | 0,8 с | За ?T + 1 с до входа в зону пуска |
| ВЫКЛ. | |||||
| Ручной | ВКЛ. | от 0,6 до 30 с | |||
| ВЫКЛ. | |||||
| Вдогон | Автомат | ВКЛ. | 0,8 с | За ?T + 1 с до прохождения целью параметра | |
| ВЫКЛ. | |||||
| Ручной | ВКЛ. | от 0,6 до 30 с | |||
| ВЫКЛ. |
При этом:
1. Продолжая прицеливание и приблизительно за 2 с до входа цели в зону пуска (что ориентировочно определяется по видимому стрелком размеру цели — не менее половины диаметра внутреннего отверстия мушки), стрелок должен перевести пусковой крючок из исходного положения АР в положение РП (через положение РР) за время менее 0,6 с.
2. При заданном превышении сигналом цели сигнала фона обнаружитель цели АРП через блок логики отключает от входа следящей системы координатора сигнал ошибки арретирования и подключает сигнал ошибки слежения, т. е. переводит следящий координатор из режима арретирования в режим автоматического сопровождения цели и определения угловой скорости линии визирования. При слабом сигнале цели координатор будет периодически арретироваться для возможности перезахвата цели. Об этом свидетельствует мигание лампы световой индикации.
3. При устойчивом сопровождении цели АРП в течении 0,8 с анализирует соответствие параметров цели возможностям комплекса:
а) сигнал от цели превышает сигнал фона;
б) угловая скорость линии визирования не превышает 12°/с;
в) угол между оптической осью координатора и линией визирования (при точном прицеливании) не превышает 2°;
г) отсутствует сигнал ответа НРЗ («я — свой»).
При отрицательном результате анализа пуск задерживается. Прерывистая световая и звуковая сигнализация с частотой 12,5 Гц свидетельствует о том, что цель «своя».
При положительном результате анализа АРП подаёт на блок-реле управляющий сигнал, разрешающий пуск ракеты.
V ЭТАП — Пуск ракеты и выход её из трубы
1. При срабатывании блок-реле напряжения выдаются:
• на зарядку конденсаторов блока взведения, исключающих перерыв в электропитании при переходе с НИП на БИП;
• на электровоспламенитель ПАД, обеспечивая его воспламенение и выдачу пороховых газов на рулевую машину и БИП, который за 0,72 с выходит на режим и выдает ±(20…40) В бортового электропитания;
• через 0,72 с на электровоспламенитель стартового двигателя, обеспечивая воспламенение его заряда для создания реактивной тяги с ускорением до 120g в течении 0,065 с.
2. С началом движения ракеты по трубе:
• механизм бортразъёма ПТ обеспечит отстыковку бортразъёма и утапливание стопора ракеты;
• нож ПТ срежет трубку питания ОГС азотом.
3. При выходе ракеты из трубы:
• отработавший стартовый двигатель будет уловлен в ПТ;
• скорость полёта достигнет 30 м/с, а скорость вращения — 20 об/с;
• под действием осевых перегрузок осядет блокирующий стопор ПДУ взрывателя, обеспечивая снятие I ступени предохранения;
• под действием центробежных сил раскроются и зафиксируются рули, дестабилизаторы и крылья;
• при раскрывании рулей размыкатель блока взведения обеспечит выдачу напряжений БИП:
— на электровоспламенитель ПУД, обеспечивая газодинамическое управление полётом в течении 0,7 с;
— электровоспламенитель ПДУ, обеспечивая загорание пирозамедлителя (14 с) механизма самоликвидации и пиропредохранителя поворотной втулки, который, прогорая через 1–1,9 с, разрешит поворотной втулке с капсюлем-детонатором повернуться в боевое положение (снимет II ступень);
— через контакты поворотной втулки на зарядку конденсаторов С1, С2 боевой цепи — взрыватель готов к срабатыванию.
VI ЭТАП — полёт ракеты на начальном участке траектории
1. Примерно через 0,4 с после выхода ракеты из трубы (ракета удалится от стрелка на расстояние не менее 5,5 м) лучевой воспламенитель воспламенит основной заряд маршевого двигателя, который за 1,9 с работы на первом режиме разгонит ракету до крейсерской скорости (до 570 м/с);
2. Так как ракета выстреливается в направлении цели, а не в упреждённую точку, то сразу возникает угловая скорость линии визирования, и на вход автопилота от следящего координатора подается сигнал ошибки наведения, задающий плоскость наведения (положение этой плоскости задаётся положением цели, ракеты и их упреждённой точки встречи);
3. Для ускоренного вывода ракеты на кинематическую траекторию полёта в упреждённую точку используется схема ФСУРа по пеленгу. Она на определённое время, зависящее от стрельбы навстречу или вдогон, увеличивает коэффициент передачи усилительно-преобразовательного тракта АП (К = Uвых/Uвх) путём формирования сигнала, синфазного с сигналом ошибки наведения (т. е. тоже в плоскости наведения), и суммирование их на сумматоре ?I. В результате возросший управляющий сигнал АП интенсивно развернёт ракету в направлении упреждённой точки.
VII ЭТАП — самонаведение ракеты
В идеальном случае, когда цель летит равномерно и прямолинейно, а на ракету не действуют возмущающие факторы, кинематическая траектория полёта ракеты в упреждённую точку встречи с целью по методу пропорционального сближения при одноканальном релейном аэродинамическом управлении представляет собой спираль, продольная ось которой — прямая линия, соединяющая ракету и УТВ. При этом угловая скорость линии визирования «ракета — цель» равна нулю.
Практически (из-за манёвра цели и возмущений ракеты) возникает угловая скорость линии визирования, которая измеряется и преобразуется следящим координатором ОГС в информационный электрический сигнал ошибки наведения. Автопилот (следящий привод рулей), отрабатывая ошибку наведения, создает управляющую аэродинамическую силу, изменяющую траекторию полёта в сторону уменьшения угловой скорости линии визирования. Ракета направляется в новую (мгновенную) упреждённую точку. И так до встречи с целью.
VIII ЭТАП — наведение в ближайшей зоне и подрыв БЧ
1. При приближении ракеты к цели возрастает тепловое изображение цели в фокальной плоскости объектива (диаметр пятна) и уменьшается разрешающая способность координатора по ошибке наведения. Для нейтрализации этого явления в ОГС используется схема ближней зоны, обеспечивающая слежение за энергетическим максимумом излучения цели и высокую точность наведения.
2. Для высокой точности наведения и малой уязвимости сопла реактивного двигателя в ОГС предусмотрена схема смещения центра попадания, обеспечивающая формирование дополнительного сигнала управления полётом, отклоняющего ракету от сопла в корпус реактивного самолета.
3. Для подрыва боевой части и уничтожения цели осколочно-фугасным действием взрыва используется контактный взрыватель с основным и дублирующим магнитоэлектрическими датчиками. Основной датчик формирует импульс подрыва БЧ и остатков топлива МД при замыкании его магнитного поля через металлическую обшивку самолёта (т. е. допускает рикошет ракеты). Дублирующий датчик формирует импульс подрыва с временной задержкой от момента удара о цель (т. е. обеспечивает подрыв внутри цели).
4. При промахе ракеты по цели механизм самоликвидации взрывателя уничтожит ракету через 14–19 с после старта.
1.3. Устройство и функционирование средств целеуказания и связи
1.3.1. Переносный электронный планшет 1Л15-1
Переносный электронный планшет 1Л15-1 предназначен для приёма целеуказания и оповещения командиром зенитного отделения стрелков-зенитчиков о месте нахождения, направлении движения и принадлежности («свой-чужой») воздушных целей в районе расположения зенитного отделения (в радиусе 12,8 км).
Информация о воздушной обстановке на ПЭП поступает по радиоканалу с пункта управления (ПУ-12М, ППРУ) или радиолокационной станции в форме кодограммы.
Кроме того, ПЭП обеспечивает:
• при отображении целей с принадлежностью «чужой»: импульсное свечение светодиодов с частотой 3,5 Гц и скважностью 2;
• при отображении целей с принадлежностью «свой»: непрерывное свечение светодиодов или импульсное с частотой 1 Гц и скважностью 1,03;
• наличие звуковой и световой сигнализации:
— при потере связи;
— сбросе топопривязки;
— разряде батареи питания;
— нахождении «чужой» цели в зоне отображения.

Рис. 64. ПЭП 1Л1-5

1

2

3

4
5

6
Рис. 65. Комплект вспомогательного оборудования ПЭП:
1 — вспомогательное оборудование в сумке; 2 — шкала поворотная; 3 — тубус; 4 — соединительное устройство; 5 — футляр и переходное устройство; 6 — выносной телефон
В комплект ПЭП входят:
а) электронный контейнер;
б) радиоприёмник Р-255 ПП с антенной;
в) источник автономного питания (6 элементов А-343 «САЛЮТ-1»);
г) вспомогательное оборудование, переносимое в сумке:
— тубус для защиты экрана от попадания солнечных лучей;
— шкала поворотная для точного определения азимута цели;
— соединительное устройство для стыковки радиоприёмника с ПЭП при использовании в холодное время года;
— футляр и переходное устройство для обеспечения питания ПЭП при использовании в холодное время года;
— выносной телефон для обеспечения работы в условиях повышенной шумовой обстановки;
— одиночный комплект ЗИП.
Расположение органов управления и сигнализации на передней панели ПЭП можно посмотреть на с. 47–48 Альбома схем и рисунков к дисциплине «Устройство и эксплуатация ПЗРК», часть 1.
Таблица 13
Тактико-технические характеристики
| 1 | Диапазон принимаемых радиочастот на любом из 300 каналов связи, расположенных через 50 Гц | 37,050–51,950 МГц |
|---|---|---|
| 2 | Максимальное расстояние отображения цели от оператора, км | 12,8 |
| 3 | Число одновременно отображаемых целей | до 4 |
| 4 | Разрешающая способность матричного светодиодного индикатора по направлениям юг-север, запад-восток, км | 1,6 |
| 5 | Время приведения в боевую готовность, мин | 3 |
| 6 | Время выхода на режим, с | 7 |
| 7 | Время непрерывной работы, ч | 24 |
| 8 | Расстояние до передающего пункта, км | до 15 |
| 9 | Диапазон топопривязки (с точностью ± 100 м), км | 0,2–99,9 |
| 10 | Напряжение питания, В: | |
| от автономного источника | +9 | |
| от внешнего источника (бортсети транспортного средства) | +27 | |
| 11 | Время непрерывной работы без замены батарей питания, ч | 12 |
| 12 | Время замены источника питания, мин | 3 |
| 13 | Ресурс работы, ч | 5000 |
| 14 | Наработка на отказ, ч | не менее 500 |
| 15 | Масса, кг | 6,87 |
| 16 | Диапазон рабочих температур, °С | от –50 до +50 |
Конструктивно ПЭП выполнен в виде отдельного блока в прямоугольном герметичном корпусе с крышкой, внутри которой имеется карман для укладки антенны. Для переноса планшета используется ручка и плечевой ремень.
Общий принцип работы ПЭП
Перед применением необходимо развернуть ПЭП на позиции, соответствующие требованиям устойчивого приёма хорошего обзора, выдать питание и подготовить к работе.
Позиция должна обеспечивать удобство обзора местности и воздушного пространства; наилучшие условия радиоприёма; защиту экрана матричного светодиодного индикатора от прямых солнечных лучей; её нахождение вблизи места, указанного в боевом приказе командира. По условиям радиоприёма лучше располагаться на высоте, на скате со стороны пункта управления или боковом. Не следует располагаться ближе 50 м от массивных сооружений и опушек леса.
Информация о воздушной обстановке на ПЭП поступает в форме кодограммы по радиоканалу с БКП или КП зенитного дивизиона (ПУ-12М, ППРУ или радиолокационной станции). Антенна и далее приёмник принимают адресованную информацию по основному или дополнительному частотному каналу и направляет её в электронный блок для преобразования в сигнал, удобный для отображения на матричном индикаторе.
При пересечении «чужой» целью зоны отображения воздушной обстановки появляется импульсный световой сигнал «ЗОНА» (с частотой мигания 3,5 Гц) и синхронно с ним прерывистый звуковой сигнал. Одновременно с индикатором «ЗОНА» начинает мигать светодиод индикатора отображения цели. Пересечение «своим» самолётом (вертолётом) зоны отображения воздушной обстановки индикатором «ЗОНА» и звуковой сигнализацией не фиксируется. На индикаторе «свой» самолёт (вертолёт) отображается немигающим (мигающим с частотой 1 Гц) свечением светодиода.
Траектория движения цели внутри зоны отображается последовательным загоранием светодиодов индикатора. Степень новизны информации о воздушной обстановке отображается яркостью свечения светодиодов (новой информации соответствует более яркое свечение светодиодов), что позволяет фиксировать направление движения цели.
Световая сигнализация в ПЭП независимая (могут светиться одновременно 1, 2, 3, 4 индикатора), а звуковая — приоритетная (может звучать только один сигнал). Сигналы «Потеря связи» и «Топопривязка» имеют одинаковый приоритет перед сигналами «Смени батарею» и «Зона».
Командир отделения (стрелок-зенитчик), получив целеуказание или самостоятельно, производит целераспределение и ставит задачу назначенным стрелкам.
1.3.2. Средства связи
Для осуществления управления стрелками-зенитчиками в боевой обстановке может использоваться переносная радиостанция Р-157.
Радиостанция Р-157 носимая, ультракоротковолновая, с частотной модуляцией, приёмопередающая, симплексная, предназначена для беспоисковой и бесподстроечной телефонной радиосвязи с однотипными радиостанциями в условиях воздействия:
• температуры окружающей среды от –50 до +50 °C;
• влажности до 98 % при температуре до +35 °C;
• инея и росы;
• солнечной радиации;
• вибрации до 80 Гц с ускорением до 6g;
• многократных ударов с ускорением до 15g;
• пониженного атмосферного давления до 460 мм рт. ст.;
• после воздействия предельных температур от –50 до +65 °C;
• пониженного атмосферного давления до 170 мм рт. ст.;
• одиночных ударов до 120g;
• водонепроницаемая;
• выдерживает транспортирование любым видом транспорта, в т. ч. и в самолётах при пониженном атмосферном давлении до 170 мм рт. ст.

Рис. 66. Радиостанция Р-157
Радиостанция имеет 100 каналов, размещённых в диапазоне 44,0–53,9 МГц через каждые 100 кГц.
Радиостанция имеет следующие режимы работы:
• приём речевых сообщений и тонального вызова;
• приём с подавлением шумов;
• передача речевых сообщений;
• передача тонального вызова.
Основным источником питания служит аккумуляторная батарея 10ЦНК-0,45–12,6В; резервным источником — батарея, составленная из 9 сухих элементов А-316 КВАНТ.
Таблица 14
Основные технические характеристики
| 1 | Габаритные размеры приёмопередатчика с батареей с выступающими частями, мм | не более 55/115/245 |
|---|---|---|
| 2 | Масса действующего комплекта радиостанции, кг | не более 2,2 |
| 3 | Дальность действия, км: | |
| при работе с однотипными радиостанциями, при рабочем напряжении источника питания, с выключенным подавителем шумов, со штыревой антенной, размещенной на спине оператора, находящегося в положении стоя, на среднепересечённой местности | не менее 1 | |
| при работе на антенну в ремне в положении оператора стоя | не менее 0,5 | |
| Внимание: на частотах 44,0; 45,0; 46,0; 47,0; 48,0; 48,8; 50,0 и 52,0 МГц указанная дальность связи не гарантируется. | ||
| 4 | Напряжение питания, В: | |
| номинальное | 12,6 | |
| рабочее | от 10,8 до 14 | |
| Свежезаряженная батарея 10ЦНК-0,45–12,6В и батарея, составленная из свежеизготовленных элементов А-316 КВАНТ (со сроком хранения не менее 5 и не более 30 суток), обеспечивают в нормальных климатических условиях не менее 9 часов непрерывной работы радиостанции при соотношении времени передачи к времени приема 1:5 и непрерывной работе на передачу не более 5 мин |
Взаимные помехи двух радиостанций, расположенных на расстоянии не менее 150 м друг от друга и работающих на несовпадающих частотах, не мешают приёму радиограмм «своих» корреспондентов.
Входные цепи приёмника имеют защиту от излучений передатчиков мощностью до 100 Вт, находящихся на расстоянии не менее 5 м от радиостанции.
Радиостанция обеспечивает посылку тонального вызова частотой 1000 ± 200 Гц.
Стабилизация частоты кварцевая, установка рабочей частоты канала дискретная.
Состав одного действующего комплекта:
• приёмопередатчик;
• батарея 10ЦНК-0,45–12,6В;
• антенна;
• гарнитура микротелефонная;
• чехол;
• ремни для крепления радиостанции в разных вариантах (3 шт.).
В одиночный комплект ЗИП входят вспомогательные устройства:
• колодка № 1 для выносного блока питания, используемая для подключения батареи к приёмопередатчику через кабель в случае, когда батарею необходимо разместить вне приёмопередатчика;
• колодка № 2 для зарядки батареи аккумуляторов от зарядного устройства типа ЗУ-3;
• колодка № 3 для подключения приёмопередатчика к внешнему источнику питания;
• измерительный кабель для подключения нагрузки или генератора к антенному гнезду приёмопередатчика.
Действующий комплект радиостанции и одиночный комплект ЗИП позволяют комплектовать три варианта крепления радиостанции: на груди, на спине и на бедре:
• первый и второй варианты крепления обеспечиваются действующим комплектом, состоящим из приёмопередатчика, батареи, антенны штыревой, гарнитуры микротелефонной и ремней.
• третий вариант комплектуется из частей действующего и одиночного комплектов: приёмопередатчика, батареи, антенны штыревой или в ремне, гарнитуры микротелефонной, ремня крепления приёмопередатчика и сумки для укладки радиостанции.
Во всех трёх вариантах при работе в зимнее время имеется возможность защитить батарею от замерзания, спрятав её под одежду. В этом случае используется колодка № 1 из состава одиночного комплекта ЗИП.
Рис. 67. Комплект ЗИП


Рис. 68. Варианты крепления Р-157
Общее устройство радиостанции Р-157
Радиостанция состоит из следующих функциональных узлов: приёмопередатчика (приёмника, передатчика и синтезатора), микротелефонной гарнитуры, батареи и антенны.
Приёмник предназначен для усиления, преобразования и детектирования частотно-модулированного сигнала, принятого антенной.
Передатчик предназначен для формирования высокочастотного частотно-модулированного сигнала.
Синтезатор предназначен для формирования высокостабильных колебаний с шагом сетки частот 100 кГц в заданном диапазоне частот и является гетеродином для приемника и передатчика.
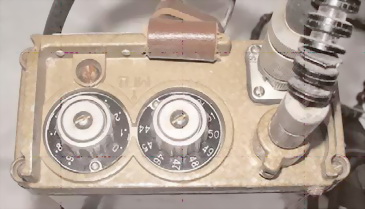
Рис. 69. Передняя панель Р-157
Приёмопередатчик является основной частью комплекта радиостанции. На его передней панели находятся:
• антенное гнездо;
• разъём для подключения микротелефонной гарнитуры;
• отверстие с заглушкой для проверки приёмопередатчика на герметичность;
• две ручки с лимбами для установки рабочей частоты приёмопередатчика: левая — для установки мегагерц, правая — для установки сотен килогерц. Мегагерцы переключаются с 44 до 53 дискретно через 1 МГц, сотни килогерц — от 0 до 9 дискретно через 100 кГц. Число, обозначающее рабочую частоту приёмопередатчика, читается по двум лимбам в месте их соприкосновения. Для ориентирования это место указано стрелкой на панели.
На корпусе имеются пазы для ремней и выступы для защиты органов управления от повреждения при случайном падении приёмопередатчика.
Корпус приёмопередатчика изготовлен из ударопрочной пластмассы и имеет два отсека: герметичный — для установки шасси с платами и негерметичный — для установки батареи.
Батарейный отсек расположен снизу корпуса и отделён герметичной перегородкой, на которой установлены пружинящие контакты для подачи напряжения питания и замок для закрепления батареи.
В состав микротелефонной гарнитуры входят: щекофон с эластичной лентой, манипулятор, кабель с разъёмом для подключения манипулятора к приёмопередатчику и кабель, соединяющий щекофон с манипулятором. Манипулятор осуществляет переключение вида работ, включение генератора тонального вызова, включение подавителя шумов, имеет индикатор разряда аккумуляторной батареи.
Батарея предназначена для обеспечения приёмопередатчика электроэнергией. В комплекте радиостанции имеется кассета 9-А316-КВАНТ-12,6В. Эта кассета ничем не отличается от кассеты аккумуляторной батареи. В неё при необходимости могут быть вставлены 9 элементов А-316, которые служат резервным источником питания.
В состав радиостанции входят две антенны: в ремне и штыревая.
Антенна в ремне — гибкая малогабаритная антенна с замедлением волны. Представляет собой гибкий медный провод, уложенный зигзагообразно в ремне. Вывод антенны выполнен гибким проводом, который в нерабочем положении закрепляется застежкой.
По электрическим характеристикам приближается к вертикальному четвертьволновому штырю: имеет приблизительно такую же диаграмму направленности и коэффициент бегущей волны, но несколько пониженное входное сопротивление и действующую высоту.
Штыревая антенна — четвертьволновая штыревая гибкая антенна конструкции Куликова.
Общий принцип работы на средствах связи
Командир отделения или стрелок-зенитчик занимает позицию вблизи места, указанного командиром с учётом условий, обеспечивающих наилучшую передачу и приём радиосигнала, разворачивает радиостанцию, производит установку частоты и проверку работоспособности.
При управлении подразделением командир отделения осуществляет постановку огневых задач стрелкам-зенитчикам, контроль их выполнения и доклады командиру взвода. Стрелки-зенитчики, получив огневую задачу или команду управления, её выполняют или, при необходимости, подают установленный сигнал.
Сформированный передатчиком частотно-модулированный сигнал после преобразования, усиления и фильтрации поступает в антенну. Антенна преобразует токи высокой частоты в электромагнитное излучение. Принятый радиосигнал преобразуется в голосовой и выдаётся на телефон.
В качестве средства связи в зенитном отделении, кроме того, может использоваться переносная радиостанция ранцевого типа Р-159, а также штатные радиостанции Р-123, Р-173 и др., находящиеся на подвижных средствах.
1.4. Устройство и функционирование учебно-тренировочных средств
1.4.1. Унифицированный полевой тренажёр 9Ф635
Унифицированный полевой тренажёр стрелков-зенитчиков комплексов 9К38 (9К310) предназначен для обучения и тренировки одного, двух или трёх стрелков-зенитчиков боевой работе на комплексах 9К38 (9К310) без средств обнаружения и целеуказания при стрельбе с огневых позиций по имитированным и реальным воздушным целям.
Он обеспечивает приобретение навыков в визуальном определении типа цели и параметров её движения (дальности, курса, скорости, высоты полёта, параметра), определении границ зоны пуска, выполнении операций по захвату цели, её сопровождению и пуску ракеты (с введением углов упреждения для «Стрела-3», «Игла-1»).

Рис. 70. Тренировка стрелков-зенитчиков на УПТ 9Ф635
Аппаратура тренажёра обеспечивает:
• имитацию прямолинейного равномерного движения различных типов воздушных целей с дискретными характеристиками скорости, параметра и высоты движения цели;
• тренировку стрелков-зенитчиков в выполнении операций захвата и сопровождения цели и пуска ракеты, как на встречных, так и на догонных курсах;
• контроль выбранного стрелками-зенитчиками вида стрельбы (ручной или автоматический);
• одновременный контроль работы трёх стрелков-зенитчиков с регистрацией одной из трёх временных характеристик: захват цели, разарретирование ГСН или пуск ракеты;
• расширенный контроль работы одного стрелка-зенитчика с регистрацией временных характеристик;
• фиксацию трёх потерь цели в режиме «захвата» и одной потери в режиме «разарретировано»;
• возможность оценки действий стрелка-зенитчика непосредственно после пуска ракеты;
• имитацию внешнего вида четырех типов самолетов (F— 4C, F-16, А-10А, F-111A) и одного вертолета типа «Ирокез»;
• точность контроля временных характеристик не хуже 2 % за время контроля 30 с;
• автоматический ввод в пункт контроля сигналов, соответствующих моментам прохождения имитатора цели относительно каждой огневой позиции.
Таблица 15
Основные технические характеристики
| 1 | Режим работы УПТ | Не более 5 пусков с перерывами между ними не более 2 мин, затем перерыв 1 ч |
| 2 | Время непрерывной работы | 8 ч в сутки с 30-минутным перерывом после 4 ч работы |
| 3 | Средняя наработка на отказ, ч | 100 |
| 4 | Диапазон рабочих температур, °С | от –30 до +50 |
Состав тренажёра:
1) пульт инструктора;
2) блок питания с заземлённой средней точкой;
3) изделие учебно-тренировочное в трубе 9Ф727 с пусковым механизмом 9Ф728;
4) агрегат электропитания АБ-1-О/230;
5) имитатор цели в составе:
• автомобиль или тележка с устройством движения мишени;
• мачта изменяемой высоты, устанавливаемая в кузове автомобиля или тележки;
• модели воздушных целей, выполненные в масштабах 1:25 или 1:50;
• источник теплового излучения;
6) датчик параметра:
• автомобильный;
• железнодорожный;
7) электромегафон;
планшет с зонами пуска для типовых моделей цели;
9) комплект электрических кабелей, принадлежностей и ЗИП.
Тренажёр может быть развёрнут в двух вариантах:
1) на подвижном (автомобильном), с установкой имитатора цели в кузове автомобиля ГАЗ-66 или ЗИЛ-131;
2) стационарном (железнодорожном), с установкой имитатора цели на тележку ДПМ-66М установки движения мишени УДМ-66М.
1. Пульт инструктора представляет собой электронный блок, обеспечивающий управление:
• временем включения и мощностью источника теплового излучения имитатора цели;
• движением тележки влево, вправо, стоп;
• качанием рамы имитатора БМП;
• ручным введением режимов разарретирования, пуском, параметром;
• переключением табло в режим «кода» или «время»;
• фиксирование временных характеристик работы стрелков.

Рис. 71. Пульт инструктора
2. Блок питания представляет собой электронный блок, обеспечивающий включение пульта инструктора и сигнализацию о выдаче питания, а также контроль выдаваемого напряжения +5ВII, +5ВI, +12В, –20В, +20В, –12В.
3. Изделие учебно-тренировочное в пусковой трубе 9Ф727 предназначено для обучения стрелков-зенитчиков практической работе с ракетой, включая операции подготовки к пуску, прицеливание и пуск (без реального пуска ракеты), отработки у них навыков выполнения приёмов основных предпусковых работ с боевыми ракетами.
Учебно-тренировочная ракета обеспечивает имитацию звукового и светового воздействия боевых ракет на стрелка-зенитчика до схода ракеты.
Ракета 9Ф727.01.000, уложенная в пусковую трубу 9Ф727.02.000 с пристыкованным макетом НИП 9Б238 МАКЕТ, представляет собой имитатор штатного изделия. Габаритно-весовые данные учебно-тренировочного изделия в рабочем состоянии полностью соответствуют данным боевой ракеты, а все механизмы и узлы, непосредственно используемые в тренировке оператора, имитируют соответствующие основные механизмы и узлы боевой ракеты по внешнему виду, величине и характеру прикладываемых усилий.

Рис. 72. Блок питания

Рис. 73. Учебно-тренировочные комплексы
Основные характеристики ракеты 9Ф727:
• ресурс работы — 80 часов или 3000 циклов;
• диапазон рабочих температур: от –30 до +50 °C;
• рабочий диапазон длин волн: от 1,8 до 2,2 мкм;
• транспортирование автотранспортом: до 5000 км.
Имитатор штатного изделия 9Ф727.01 состоит из оптической головки самонаведения и аппаратурного отсека. Головка самонаведения, применяемая в изделии 9Ф727, взята от ракеты комплекса «Стрела-2М» для того, чтобы не использовать штатные НИП, т. к. эта головка не требует охлаждения жидким азотом. Применение такой головки самонаведения не изменяет последовательности операций по подготовке к проведению работ с ракетой, прицеливанию и пуску, и в то же время изделие получается значительно дешевле.
Аппаратурный отсек 9Ф727.02.10 представляет собой металлическую трубу, в которой расположено устройство согласования работы пускового механизма и головки самонаведения, представляющее две прямоугольные платы с радиоэлементами. Кроме того, в нём имеется бортразъем для стыковки с пусковой трубой.
4. Агрегат электропитания АБ-1-О/230 обеспечивает автономное однофазное питание переменным напряжением 220 В аппаратуры тренажёра. Представляет собой однофазный генератор переменного тока с приводом от двигателя внутреннего сгорания.
5. Имитатор цели обеспечивает имитацию равномерного прямолинейного движения 4-х типов воздушных целей с различными характеристиками. Мачта изменяемой высоты, устанавливаемая в кузове автомобиля или тележки, представляет собой разборную конструкцию, на которую крепятся источник теплового излучения и имитаторы целей.
6. Датчики параметра обеспечивают начало отсчёта временных характеристик работы стрелков. В различных вариантах тренажёра датчик параметра срабатывает при повороте рычага концевиком тележки или наезде на датчик колесом автомобиля (другая конструкция датчика).

1

2

3

4

5

6
Рис. 74. Элементы УПТ 9Ф635:
1 — агрегат электропитания; 2 — макеты воздушных целей; 3 — мачта изменяемой высоты; 4 — датчик параметра; 5 — электромегафон; 6 — катушка с кабелем
7. Электромегафон обеспечивает подачу команд инструктором:
• водителю автомобиля о скорости движения;
• указания стрелкам-зенитчикам.
8. Планшет с зонами пуска для типовых моделей цели используется для оценки правильности определения стрелком-зенитчиком зоны поражения и момента пуска.
9. Комплект электрических кабелей обеспечивает стыковку всех электрических элементов для обеспечения электропитания и функционирования тренажёра в полевых условиях. Кабели смотаны в катушки, разъёмы закрыты крышками.
Общий принцип работы тренажёра
Для подготовки тренажёра к работе его элементы должны быть размещены на подготовленной местности (позиции). Для организации занятий намечается трасса движения ИВЦ. Размещение аппаратуры изделия в полевых условиях (подвижный вариант) должно производиться на прямолинейном участке трассы. Электроагрегат необходимо располагать с подветренной стороны таким образом, чтобы создавать меньше шумовых помех, но не далее 40 м от рабочего места инструктора. Пульт инструктора и блок питания должны располагаться во временных или стационарных укрытиях для защиты от воздействия атмосферных осадков.
Основные требования к трассе:
• трасса не должна иметь выбоин и резких перепадов профиля местности, которые могут вызвать значительные (до 30 см) колебания модели ВЦ;
• на параметровых участках трассы грунт должен быть уплотнен для исключения вдавливания в грунт рукава датчика параметра.
Команды и указания стрелкам-зенитчикам и водителю автомобиля руководитель подаёт с помощью электромегафона, а управление рамой качания, имитатором цели и источником теплового излучения (при стационарном варианте) осуществляет с помощью пульта дистанционного управления.
По командам инструктора при движении автомобиля (тележки) по трассе последний пересекает датчики параметров, информация о прохождении имитатором воздушной цели параметровых участков относительно каждого из стрелков-зенитчиков автоматически вводится через кабели и переходные колодки в прибор контроля. Тепловой источник, установленный на имитаторе цели возле модели, имитирует тепловое излучение.
Стрелки-зенитчики, обнаружив цель, производят подготовку учебно-тренировочного комплекса к пуску, изготавливаются к стрельбе, сопровождают цель и имитируют пуск ракеты. При этом головка самонаведения учебно-тренировочного комплекса захватывает и сопровождает источник теплового излучения. Данные о действиях стрелков-зенитчиков с учебно-тренировочного комплекса по кабелям поступают в прибор контроля.
Руководитель по прибору контроля оценивает правильность последовательности выполнения операций и временные характеристики боевой работы стрелков-зенитчиков, величины вводимых ими углов упреждения и возвышения, а по планшету инструктора — правильность определения зон пуска.
1.4.2. Учебно-тренировочный комплект 9Ф663
Учебно-тренировочный комплект 9Ф663 предназначен:
1) для обучения оператора правилам работы с изделиями 9К310, 9К38;
2) психофизиологической подготовки оператора по обращению с изделиями 9К310, 9К38;
3) одновременного обучения правилам работы и психофизиологической тренировки двух операторов по обращению с изделиями 9К310, 9К38;
4) контроля реальной работы одного оператора с изделиями 9К310, 9К38.
Учебно-тренировочный комплект обеспечивает обучение и реальную работу как в полевых стационарных условиях, так и с объекта, движущегося по ровной местности со скоростью не более 20 км/ч.

Рис. 75. Тренировка стрелков-зенитчиков на УТК
Основные технические данные
Учебно-тренировочный комплект 9Ф663 обеспечивает:
1) обучение оператора правилам работы с изделиями 9К310, 9К38;
2) имитацию звукового, светового и механического воздействия изделий 9К310, 9К38 на стрелка;
3) реальную работу по объектам и их имитаторам;
4) возможность проведения работ с комплектом только в случае наличия разрешения инструктора;
5) безотказность работы при случайном падении изделия 9Ф726 02.000 в трубе 9Ф726 05.000 и прибора 9Ф726 02.010 на бетонное основание с высоты до 2 м в укупорке и с высоты до 1 м на грунт изделия 9Ф726 01.000 с пристыкованным механизмом — тренировочно-практическим 9Ф634 02.000;
6) безопасность при случайном падении изделия 9Ф726 02.000 в трубе 9Ф726 05.000 и прибора 9Ф726 02.010 в укупорке на бетонное основание с высоты до 5 м.
А также:
• психофизиологическое воздействие учебно-тренировочного комплекта на оператора, аналогичное воздействию изделий 9К310, 9К38;
• габаритно-весовые данные изделий 9Ф727 00.000 и 9Ф726 01.000 с пристыкованным МУ 9Ф728 00.000, МТП 9Ф634 02.000 и изделиями 9Б238. Макет соответствует габаритно-весовым данным изделий 9К310 и 9К38;
• питание комплекта 9Ф663 осуществляется от источника питания 9Ф663 02.000 или от внешнего источника напряжением 22–30 В и током не менее 8А.
Состав комплекта
1) изделие тренировочно-практическое 9Ф726 02.000 в трубе 9Ф726 05.000;
2) изделие учебно-тренировочное в трубе 9Ф727 00.000;
3) механизм тренировочно-практический 9Ф634 02.000;
4) механизм учебный 9Ф728 00.000;
5) изделие 9Б238 Макет;
6) прибор контроля 9Ф663 01.000;
7) блок контроля 9Ф663 52.140;
комплект приборов 9Ф726 02.010 (30 штук в укупорке);
9) источник питания 9Ф663 02.000;
10) устройство зарядное 9Ф636 52.100;
11) имитатор объекта 9Ф663 03.000;
12) кабели и средства заземления;
13) ЗИП комплекта.
Общее устройство комплекта
Учебно-тренировочный комплект 9Ф663 включает в себя тренировочно-практическое изделие в трубе 9Ф726 01.000 с пристыкованным к трубе 9Ф727 03.000 изделием 9Б238 Макет и механизмом учебным 9Ф728 00.000, соединённым кабелем 9Ф663 52.010 с прибором контроля 9Ф663 01.000.
ПК заземлен посредством провода и штыря заземления и соединен кабелем 9Ф663 52.030 с источником питания 9Ф663 02.000.
Имитатор 9Ф663 03.010 присоединяется к гнездам Х6 прибора контроля посредством кабеля 9Ф663 03.010.
Устройство составных частей
1. Изделие тренировочно-практическое 9Ф726 02.000. представляет собой полую металлическую болванку, к которой пристыковывается прибор 9Ф726 02.010.
Изделие 9Ф726 02.000 с приборами позволяет производить 30 реальных опытов. Время смены прибора и установки изделия 9Ф726 02.000 в трубу 9Ф726 05.000 составляет не более 10 мин.
Труба тренировочно-практическая 9Ф726 05.000 представляет собой упрощенный вариант штатной трубы и отличается от последней отсутствием вилки разъёма, электрических цепей аппаратуры штатного изделия.
На трубе 9Ф726 05.000 сохранены электрические цепи, которые обеспечивают подачу напряжения на прибор 9Ф726 02.010 и лампу световой информации.

Рис. 76. Труба тренировочно-практическая с подстыкованным механизмом тренировочно-практическим
2. Изделие учебно-тренировочное в трубе 9Ф727 00.000 представляет собой имитатор штатного изделия и состоит из учебно-тренировочного изделия 9Ф727 01.000, уложенного в трубу учебную 9Ф727 03.000.
Труба учебная 9Ф727 03.000 представляет собой имитатор штатной трубы и отличается от последней электрической схемой.

Рис. 77. Труба учебная с подстыкованным механизмом учебным

Рис. 78. Механизм тренировочно-практический с подстыкованным блоком контроля
3. Механизм тренировочно-практический 9Ф634 02.000 обеспечивает подачу напряжения на электрические цепи прибора 9Ф726 02.010, блокировку схода при углах возвышения изделия 9Ф726 01.000 менее 18° и более 73° и воспроизведение звуковой информации.
МТП состоит из корпуса, вилки для подстыковки к изделию 9Ф726 01.000, закрываемой крышкой, блока датчиков (ртутные замыкатели), устанавливаемого в корпусе, и спускового крючка.
Внешний вид и габаритные размеры МТП 9Ф634 02.000 соответствуют штатному механизму, за исключением дополнительной вилки, через которую подается питание и информация с ПК 9Ф663 01.000.
4. Механизм учебный 9Ф728 00.000 обеспечивает подготовку учебного и штатного изделий к работе, осуществление работы, выдачу информации о работе оператора на ПК 9Ф663 01.000, выдачу звуковой и световой информации, а также работу комплекта в режиме «ТР-ПР».
По устройству и принципу действия аналогичен штатному механизму и отличается от последнего наличием вилки и согласующего устройства, предназначенного для согласования электронного блока механизма с прибором контроля.
5. Изделие 9Б238 Макет является макетом штатного изделия 9Б238.
6. Прибор контроля 9Ф663 01.000 предназначен для регистрации сигналов информации, временных характеристик и режимов работы оператора, а также выдачи на МТП 9Ф634 02.000 сигналов, имитирующих сигнал информации и звуковое воздействие штатного изделия, для выдачи напряжения на электрические цепи прибора 9Ф726 02.010 при снятии блокировок на приборе и имитации прохождения объектом траектории.
На лицевой панели расположены:
• розетка «XI» для подстыковки к ПК учебного механизма 9Ф728 00.000;
• розетка «X2» для подстыковки заглушки 9Ф663 52.050;
• вилка «X3» для подключения источника питания 9Ф663 02.000 с помощью кабеля 9Ф66352.030 (или ВИП с помощью кабеля 9Ф663 52.040);
• вилка «X4» для подключения учебного механизма 9Ф728 00.000 с помощью кабеля 9Ф663 52.010;
• розетка «X5» для подключения МТП 9Ф634 02.000 с помощью кабеля 9Ф663 52.020;
• гнёзда «X6» для подключения имитатора объекта 9Ф663 03.000;
• переключатель «РЕЖИМ»;
• тумблер «РАЗРЕШ — ЗАПРЕТ»;
• тумблер «Тр-пр. Учебн.»;
• переключатель «ОБЪЕКТ»;
• кнопка «ЗАПУСК»;
• кнопка «СБРОС»;
• кнопка «ВРЕМЯ ЗАХВАТА»;
• кнопка «ВРЕМЯ СХОДА»;
• кнопка «ПАРАМЕТР»;
• клемма для заземления ПК;
• две планки со стёклами и герметизирующими прокладками для ИП прибора и сигнальных лампочек;
• планка с двумя прижимами (для светофильтра 9Ф663 01.026) со стеклом и герметизирующей прокладкой;
• фальшпанель;
• измерительный прибор.

Рис. 79. Прибор контроля с подстыкованным механизмом учебным
7. Блок контроля 9Ф663 52.140 предназначен для проверки комплекта 9Ф663 на функционирование в режиме самоконтроля.
8. Прибор 9Ф726 02.010 одноразового использования обеспечивает выброс изделия 9Ф726 02.000 из трубы на расстояние до 35–40 м.

Рис. 80. Приборы в укупорке
9. Источник питания 9Ф663 02.000 предназначен для питания изделий и аппаратуры комплекта 9Ф663.
Источник питания состоит из деревянного футляра с двумя плотно вставленными в свои гнёзда аккумуляторными батареями. Масса источника питания с аккумуляторными батареями — не более 10 кг.
Аккумуляторная батарея 11ФГ-400 состоит из одиннадцати последовательно соединённых щелочных никель-кадмиевых герметичных аккумуляторов. Обеспечивает постоянное напряжение (±25 ± 3 В).
Устройство зарядное 9Ф636 52.100 9Ф636 52.100 предназначено:
1) для заряда аккумуляторной батареи 11ФГ400 от источника переменного тока напряжением 220В ± 10 %, частотой 50 Гц;
2) доразряда аккумуляторной батареи 11ФГ-400;
3) проверки годности аккумуляторной батареи;
4) проведения тренировочных циклов.

Рис. 81. Внешний вид прибора
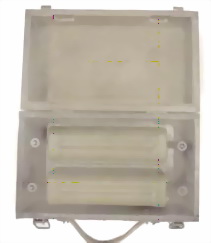
Рис. 82. Источник питания

Рис. 83. Зарядное устройство с аккумулятором
11. Имитатор объекта 9Ф663 03.000 предназначен для работы с учебно-тренировочным изделием 9Ф727 00.000.
ИО состоит из имитатора, кронштейна, переходника, штыря и наконечника.
12. Кабели и средства заземления. Кабели обеспечивают подключение прибора контроля к штатному источнику питания, внешнему источнику, а также работоспособность аппаратуры УТК при проведении тренировок.

Рис. 84. Укупорка с кабелями

Рис. 85. Укупорка с ЗИП
Средства заземления предназначены для заземления ПК 9Ф663 01.000 при работе и состоят из провода заземления БП3 2 02.010 и штыря заземления 9Ф663 03.040. Штырь заземления состоит из штыря и наконечника, которые в рабочем состоянии свинчиваются между собой. Гайка служит для закрепления провода заземления.
13. ЗИП комплекта предназначен для устранения неисправностей без нарушения гарантийных пломб и обеспечения надёжной эксплуатации изделий и приборов, входящих в состав комплекта 9Ф663.
ЗИП комплекта 9Ф663 состоит из одиночного и группового комплектов.
Все элементы комплекта хранятся и перевозятся в штатных укупорках согласно схемам укладки ТО и ИЭ.
Общий принцип работы УТК
Перед началом работы на УТК необходимо выбрать и подготовить позицию для его развёртывания, отвечающую требованиям Инструкции по эксплуатации и Мерам безопасности («…К работе с учебно-тренировочным комплектом 9Ф663 допускаются лица, изучившие устройство и правила эксплуатации изделий 9К310, 9К38, техническое описание комплекта 9Ф663 и настоящую инструкцию. Личный состав должен строго выполнять требования настоящей инструкции, бережно относиться к изделиям, не допуская их падения и соударений. Допуск личного состава к работе производится после проверки знаний материальной части штатных комплексов, правил эксплуатации и техники безопасности.
Подготовку к работе изделия 9Ф726 02.000, работу, подготовку к повторному использованию комплекта 9Ф663 проводить в строгом соответствии с разделом II инструкции. Для сохранения тренировочно-практического изделия 9Ф726 02.000 необходимо выбирать место для работы таким образом, чтобы падение изделия происходило на мягкий грунт (пахота, песок, снег). Разрешается производить подготовку изделия 9Ф726 01.000 к повторному использованию в полевых условиях с обеспечением защиты от атмосферных осадков…»). Также предварительно необходимо зарядить источник питания.
Элементы УТК извлекаются из укупорок, размещаются на местности, стыкуются между собой электрическими кабелями в соответствие со схемой подключения. Перед началом тренировок проводится проверка комплекта на функционирование в режиме самоконтроля, после чего органы управления устанавливаются в исходное состояние.
Тренировки на УТК проводятся в одном из режимов:
• учебно-тренировочном;
• тренировочно-практическом с учебным или действующим прибором;
• 2-х операторов в тренировочно-практическом;
• с изделиями 9М39 (9М313).
Во время тренировки инструктор (командир отделения) контролирует действия оператора (стрелка-зенитчика), подавая ему команды и устанавливая органы управления прибора контроля в соответствующее порядку проведения работ положение.
Оператор, изготавливаясь к имитации стрельбы по имитатору объекта или для проведения тренировочного пуска ракеты, выполняет подаваемые команды и докладывает о результатах.
После проведения каждой последующей тренировки производится анализ работ оператора согласно ИЭ. По окончании тренировок органы управления изделий устанавливаются в исходные положения, элементы комплекта расстыковываются и укладываются в свои укупорки.
1.4.3. Унифицированный классный тренажёр 9Ф874
Унифицированный классный тренажёр 9Ф874 переносных зенитных ракетных комплексов типа «Игла» предназначен:
• для обучения стрелков-зенитчиков ПЗРК навыкам боевой работы в соответствии с Руководством по эксплуатации на эти боевые средства;
• тренировок с целью поддержания и совершенствования приобретенных навыков.
Тренажёр 9Ф874 обеспечивает:
А. Визуальный обзор стрелком-зенитчиком окружающего пространства на 360° по горизонтали и 180° по вертикали.
Б. Генерацию и воспроизведение изображения летящих прямолинейно, маневрирующих или зависающих целей (одиночных или групповых — до 4-х целей) с обеспечением натурных угловых скоростей, угловых размеров, внешнего вида и ракурсов обзора относительно стрелка-зенитчика.
В. Визуальную имитацию условий стрельбы:
• окружающий стрелка-зенитчика ландшафт: равнина, холмистая местность, пустыня, городская застройка, водная поверхность в т. ч. надстройки кораблей или судов;
• фоновых помех (солнце, подсвеченные облака) и ЛТЦ;
• с различного вида подвижных объектов (автомобиль, танк, надводный корабль);
• дорожные конструкции, дома, деревья и т. п.;
• различные временные и погодные условия (дневная освещенность, сумерки).
Г. Выполнение стрелком-зенитчиком операций при подготовке к пуску и проведению пуска ракеты, аналогичное действиям стрелка-зенитчика при подготовке и проведении пусков боевых ракет ПЗРК типа «Стрела», «Игла».
Д. Тренировку стрелков-зенитчиков в привитии навыков по поиску целей в заданном секторе и её обнаружению, определению типа целей, параметров и границ зон пуска при стрельбе навстречу или вдогон, в выборе и установке стрелком-зенитчиком вида и режима пуска.
Е. Визуальную и звуковую имитацию:
• полёта целей;
• функционирования боевых средств комплекса (задействование НИП, разгон гироскопа, работа РМ, срабатывание ПАД, работа БИП, захват и сопровождение цели, срабатывание выбрасывающего и маршевого двигателей при пуске и на траектории полёта, включая поражение цели, а также промах с самоликвидацией ракеты);
• эффектов, имеющих место на стартовой позиции (взрывы, автоматные и пулемётные очереди, локальные пожары и т. п.).
Ж. Выбор ориентиров на местности с оценкой их высоты и дальности в зависимости от сценария.
З. Изменение вариантов выполняемых задач, в т. ч. изображения окружающей среды, мест пуска, обстановки, количества и типов целей по выбору инструктора.
И. Воспроизведение на мониторе РМИ прошедшего цикла работы стрелка-зенитчика с возможностью разбора и оценки правильности его действий и результатов «пуска».
Для контроля и оценки деятельности обучаемых осуществляется:
• выдача инструктором устного целеуказания и других команд стрелку-зенитчику;
• контроль правильности выполнения учебных стрельб и возможность прерывания действий стрелка-зенитчика инструктором в любом месте тренировки и контроль правильности выполнения учебных стрельб с возможностью прерывания действий стрелка-зенитчика инструктором в любом месте тренировки и документированием результатов выполнения учебных задач с выставлением оценки;
• документирование результатов выполнения учебных «пусков» с автоматическим выставлением оценки за проведение обучающимся каждой зачётной стрельбы и тренировки в целом.
Базовый комплект тренажёра 9Ф874 включает:
1) имитатор боевых средств ПЗРК 9К38;
2) аппаратно-программный комплект в составе:
• шлем-дисплей с датчиком ориентации;
• акустическая система;
• рабочее место инструктора (РМИ), включающее:
— одну ПЭВМ с программным обеспечением;
— монтажную стойку;
— разветвитель VGA-сигнала;
— принтер;
— источник бесперебойного питания;
— сетевой фильтр;
— стол;
— кресло;
3) комплект ЗИП (одиночный);
4) документацию:
• комплект упаковки;
• формуляр;
• техническое описание и инструкцию по эксплуатации.

Рис. 86. Комплект тренажёра 9Ф874
Основу тренажёра составляет специальное программное обеспечение, исполняемое на компьютере. К компьютеру, являющемуся основой аппаратно-программного комплекса (АПК), подключены:
1. Шлем-дисплей с датчиком пространственной ориентации и стереонаушниками. На дисплеях шлема воспроизводится генерируемое компьютером изображение, в стереонаушниках воспроизводится звук, генерируемый компьютером, звук синхронизирован с изображением. Датчик пространственной ориентации определяет и передаёт в компьютер направление линии визирования оператора.
2. Имитатор боевых средств ПЗРК представляет собой габаритно-весовой макет ПЗРК. В нём размещён датчик пространственной ориентации, который определяет и передаёт в компьютер направление линии визирования ГСН. Все органы управления (ручка рычага накола НИП, кнопка «ВДОГОН», кнопка «СЕЛЕКТОР», пусковой крючок) через аналого-цифровой преобразователь передают в компьютер АПК своё состояние.
Специальное программное обеспечение (СПО) тренажёра, исполняемое на компьютере АПК, обеспечивает опрос датчиков на шлеме и имитаторе БС ПЗРК, а также опрашивает состояние органов управления на имитаторе БС ПЗРК. Модуль визуальной и аудиоимитации генерирует трёхмерное цветное управляемое в реальном масштабе времени изображение визуальной воздушной обстановки (в т. ч. наблюдаемых с подвижного основания) с отображением различных ландшафтов местности в различных климатических, топографических, временных и сезонных условиях и перемещающихся воздушных целей (до 4 одновременно), а также изображение механического прицельного устройства ПЗРК (с лампой световой информации) при его «попадании» в поле зрения стрелка-зенитчика.
Помимо этого, модуль визуальной и аудиоимитации обеспечивает воспроизведение через акустическую систему характерных шумов и звуков, синхронных с изображением на устройстве, объектов внешней визуальной обстановки (пролётов самолётов, вертолётов и ракет, взрывов боевой части ракет при попадании в цель или при самоликвидации, от подвижных оснований (автомобиль, танк, БТР, надводное средство)), а также создаваемых БС ПЗРК в период подготовки к «пуску» и при проведении «пуска».

Рис. 87. Тренировка стрелков-зенитчиков на УКТ
Изображение корректируется в зависимости от направления линии визирования оператора, за счёт чего создается динамическое поле обзора, обеспечивающее визуальный обзор стрелком-зенитчиком окружающего виртуального пространства на 360° в горизонтальной плоскости (от 0 до 360° по азимуту) и 180° в вертикальной (от 0 до 90° по углу места).
Полёт целей, логика и циклограмма функционирования БС ПЗРК моделируются с помощью соответствующих модулей СПО тренажёра.
Действия обучаемого оператора регистрируются и оцениваются с помощью модуля объективной оценки (являющегося частью СПО тренажёра), который в конце выполнения упражнения выставляет обучаемому оценку с выделением основных ошибок, допущенных им в ходе выполнения.
Модуль детального разбора (входящий в СПО тренажёра) позволяет после окончания выполнения упражнения произвести анализ действий обучаемого на основе наглядной демонстрации траектории полёта цели, отображения поля зрения обучаемого и поля зрения ГСН, а также протоколирования основных этапов циклограммы работы БС ПЗРК.
Все результаты выполнения упражнений хранятся в реляционной базе данных и могут быть выведены для анализа с помощью СПО тренажёра и распечатаны на принтере, входящем в состав тренажёра.
Общий принцип работы тренажёра
Инструктор включает тренажёр, запускает специальное программное обеспечение тренажёра, вводит Ф.И.О. обучаемых в базу тренажёра, выбирает упражнение из списка, докладывает порядок действий стрелка-зенитчика при проведении данной тренировки, устанавливает нулевое положение на датчиках ориентации шлема-дисплея и имитатора боевых средств, подаёт команду очередному стрелку-зенитчику.
По команде инструктора стрелок занимает место у тренажёра, переводит имитатор боевых средств в боевое положение, надевает шлем-дисплей и докладывает о готовности. После запуска упражнения производит стрельбу по воздушной цели в указанном режиме.
Инструктор запускает упражнение, контролирует действия обучаемого в ходе выполнения упражнения, заносит выставленную оценку в базу, при необходимости проводит детальный разбор действий обучаемого.
1.5. Основные подвижные средства ПЗРК
Подразделения, вооружённые ПЗРК (отделение, взвод), входящие в состав частей и подразделений Сухопутных Войск и выполняющих задачи по их прикрытию от ударов воздушного противника во всех видах боя и на марше, могут перемещаться на различных подвижных средствах, стоящих на вооружении. Такими подвижными средствами могут быть как гусеничные, так и колёсные машины, отвечающие ряду требований, основными из которых являются:
• повышенная проходимость;
• противопулевая бронезащита;
• простота в эксплуатации и проведении ремонта (иметь схожую базу с техникой прикрываемых подразделений);
• соотвествующие комплексу массо-габаритные характеристики;
• обеспечение безопасной стрельбы из ПЗРК в движении или с короткой остановки;
• наличие возможности форсирования водных преград, в том числе вплавь.
Типовыми подвижными средствами, отвечающими этим требованиям, являются бронированные БМП, БТР или МТ-ЛБ различных модификаций, а так же автомобили, предназначенные для перевозки личного состава: КамАЗ-4310, Урал-4320, ЗиЛ-131, ГАЗ-66, УАЗ и другие.
Зенитное отделение, как правило, перемещается на одном транспортном средстве, например, на БМП-2 или МТ-ЛБ.
Общие сведения о БМП
В начале 60-х годов советские конструкторские бюро приступили к разработке нового бронетранспортёра, который должен был прийти на смену устаревшим бронетранспортёрам различных модификаций (БТР-40, БТР-152, БТР-50П). Проектно-конструкторские работы завершились довольно быстро, и вскоре были готовы первые прототипы. По своим боевым возможностям они намного превосходили колёсных предшественников. Как следствие, полностью была пересмотрена тактика их применения на поле боя. Таким образом, впервые в мире в СССР появилась новая категория военных машин — боевые машины пехоты (БМП). Впервые официальный показ БМП состоялся в 1967 г., когда значительное количество этих машин уже находилось на вооружении механизированных частей Советской Армии.

Рис. 88. БТР-40

Рис. 89. БТР-50П

Рис. 90. БТР-152

Рис. 91. БМП-1
В ходе производства БМП-1 непрерывно совершенствовалась. С 1969 по 1973 гг. в серии находилась усовершенствованная БМП-1 с боевой массой 13 т. С 1973 по 1979 гг. выпускался доработанный вариант БМП-1 с боевой массой 13,2 т; в боекомплект орудия этой машины был введён осколочный выстрел.
Машина, получившая обозначение БМП-1, является гусеничной, что обеспечивает ей высокую подвижность, как по бездорожью, так и по дорогам с разными типами покрытия. В передней части корпуса находится силовое отделение (справа) и отделение управления (слева). Среднюю часть корпуса занимает боевое отделение с башней кругового вращения. За ним размещается десантное отделение.
Корпус БМП-1 сварен из стальных катаных броневых листов. Его особенностью является очень большой наклон лобовых плит, верхняя броневая плита расположена почти горизонтально. Такой большой угол наклона увеличивает вероятность рикошета, что крайне важно при незначительной толщине брони (около 30 мм). Дополнительным элементом защиты служит волноотражательный щиток, лежащий на верхней лобовой плите. В корпусе имеется ряд отверстий; спереди это люки над силовым отделением, отверстия для установки радиаторов и люки для экипажа, посередине — погон башни, сзади — люки (в крыше), лючки для монтажа стрелковых гнезд (по бортам), проём для большой двухстворчатой двери. Большинство из них закрывается крышками, часть которых выполнена из легких сплавов. Такое решение ослабляет до некоторой степени броневую защиту, но только в тех местах, поражение которых снарядом относительно маловероятно. К преимуществам такого решения следует отнести уменьшение массы бронирования, что имеет большое значение для сохранения плавучести, и простоту обслуживания машины — все панели может снять один человек.
Стрелковые гнезда в бортах БМП прикрыты снаружи дополнительными крышками каплеобразной формы, которые открываются изнутри с помощью ручек. Почти всю кормовую стенку занимают двери, подвешенные на петлях у боковых стенок корпуса и открывающиеся наружу. Таким образом, обеспечивается частичная защита от огня противника спешивающихся или возвращающихся в машину солдат десанта. Кроме того, двери выполняют функцию топливных баков, а на время ведения боевых действий рекомендуется отсоединить их от топливной системы и заполнить песком, чтобы обеспечить дополнительную защиту от огня противника и повысить пожарную безопасность.
Снаружи к боковым стенкам корпуса крепятся экраны из лёгких сплавов, которые закрывают верхние ветви гусениц. При плавании они создают так называемый гидродинамический туннель, который играет важную роль в формировании движущей силы на воде.
В средней части корпуса установлена башня кругового вращения. Она изготавливается методом литья, после чего к ней приваривается крыша из катаной броневой стали. В крыше имеется люк, крышка которого открывается вперед и тем самым обеспечивает защиту находящемуся за ней члену экипажа.
В отделении управления установлено кресло механика-водителя. Перед ним располагаются приборная доска, штурвал, три педали, рычаги и другие органы управления агрегатами машины. Управление трансмиссией осуществляется с помощью гидравлической системы, что сильно облегчает работу механика-водителя. Для наблюдения за местностью механик-водитель располагает тремя перископами, расположенными по окружности его люка, крышка которого поворачивается вправо. В условиях плохой видимости (ночь, дождь, метель) вместо среднего перископа ТНПО-170 устанавливается активный прибор ночного видения.
Командир машины попадает на своё место, расположенное за креслом механика-водителя, через люк в корпусе. Крышка этого люка лежит на подшипниках и вращается на 360°. Вместе с ней вращается универсальный прибор наблюдения ТКН-3, спаренный с инфракрасным прожектором, и два перископа. В распоряжении командира БМП имеется развитая система средств связи.
В башне кругового вращения установлена гладкоствольная 73-мм пушка 2А28, спаренная с пулемётом калибра 7,62 мм. Пушка не стабилизирована, но оснащена электрическими приводами наведения в вертикальной и горизонтальной плоскостях. В вертикальной плоскости ствол пушки перемещается в пределах от –4° до +33°.
Боекомплект состоит из 40 реактивных снарядов. Когда снаряд покидает ствол пушки, включается реактивный двигатель, разгоняющий его до скорости 700 м/с. При такой относительно невысокой скорости полёта снаряд весьма чувствителен к порывам ветра. Пушка заряжается автоматически с помощью автомата заряжания при установке ствола на угол +3,5°. Магазин с боекомплектом размещается по окружности погона башни (снаряды стоят в вертикальном положении). Такое решение позволило наводить пушку на цель и вести огонь одному человеку — наводчику, который располагается слева от пушки.
В качестве дополнительного вооружения на БМП-1 смонтирована пусковая установка противотанковых управляемых реактивных снарядов 9М14 «Малютка». Направляющая расположена перед башней (над пушкой) и механически связана с ней. Через специальный люк наводчик изнутри башни вручную устанавливает ПТУРС на пусковом рельсе. Подготовка пусковой установки к выстрелу занимает около 50 с. В полёте снаряд управляется по тянущемуся за ним проводу, который соединен с пультом управления. Наводчик корректирует полёт ПТУРСа при помощи ручки, напоминающей компьютерный джойстик. Помимо очевидных плюсов (нечувствительность к помехам, простота блоков связи «машина — снаряд»), проводной способ наведения противотанковых реактивных снарядов на цель имеет не менее весомые минусы: ограничение дальности и скорости полёта снаряда, задержка реакции снаряда на управляющий сигнал, невозможность установки на пусковую направляющую нового ПТУРСа до тех пор, пока первый не долетит до цели. Если не считать перечисленных недостатков, то противотанковые реактивные управляемые снаряды БМП-1 еще тогда имели внушительную эффективную дальность стрельбы — 3000 м. В состав возимого боекомплекта БМП-1 входят пять ПТУРСов 9М14 «Малютка»: один на пусковой направляющей, два в башне и два в корпусе.
Для прицеливания и наблюдения за местностью впереди машины наводчик имеет в своем распоряжении универсальный прибор с дневным и ночным каналами ТПН-22М1. Его дополняют 4 перископа. В ночное время прибор обеспечивает ведение наблюдения на расстоянии до 900 м.
Измерение дальности осуществляется при помощи оптического дальномера, действие которого основано на оценке высоты наблюдаемой цели. Базой прицела (основной шкалы дальномера) является цель высотой 2,7 м.
В кормовой части корпуса располагается десантное отделение, рассчитанное для перевозки пехотного отделения в составе из восьми солдат с полной выкладкой. По продольной оси машины тут установлен основной топливный бак, который одновременно служит спинкой для сидящих спиной к спине солдат.
Шесть десантников, занимающих места со стороны передней части машины, могут вести огонь из личного оружия через предусмотренные для этой цели стрелковые гнезда. Солдат, сидящий у левой створки двери, также располагает стрелковым гнездом и своим огнём может прикрывать машину с кормы. Последний десантник сидит у правой створки двери и имеет в своем распоряжении только перископ для наблюдения за местностью. Он является старшим десанта и поддерживает связь с командиром БМП.
БМП преодолевает водные преграды вплавь. Движение на воде обеспечивается путём перематывания гусениц. Верхние ветви гусениц закрыты экранами, которые образуют гидродинамические туннели. Разогнанные перематывающимися в них гусеницами, потоки воды ударяют в защиту ведущих колёс, заставляя машину двигаться. В то же время грунтозацепы нижних ветвей гусениц играют роль лопаток. На воде БМП-1 развивает скорость около 7 км/ч. Повороты выполняются путём изменения скорости перематывания одной из гусениц, радиус поворота при этом достаточно велик. Перед входом машины в воду с помощью пневмоприводов поднимаются волноотражающий щиток, расположенный в передней части корпуса, и воздухозаборная труба для подачи воздуха в двигатель, находящаяся за башней. Для обеспечения механику-водителю хорошей видимости (волноотражающий щиток закрывает обзор перед машиной) устанавливается специальный перископ ТНПО-350Б. Чтобы обеспечить требуемую герметичность корпуса, солдаты десанта приводят в действие механизм доводки, который вжимает кормовые двери в их гнезда. БМП-1 оснащена автоматической системой пожаротушения, фильтровентиляционной установкой и системой обогрева обитаемых отделений.

Рис. 92. БМП-2
Боевая машина пехоты БМП-2 разработана в результате глубокой модернизации БМП-1, выполненной в 70-х гг. конструкторским бюро Курганского машиностроительного завода, где осуществлялся серийный выпуск этих машин. Первый опытный образец был изготовлен в 1974 г., а на вооружение Советской Армии машина была принята в 1980-м.
Основные изменения коснулись вооружения машины. Вместо гладкоствольной 73-мм пушки 2А28 была установлена автоматическая скорострельная пушка 2А42 калибра 30 мм. Поводов для замены основного вооружения было предостаточно: невысокая дальность стрельбы (1300 м), недостаточная дальность эффективной стрельбы (765 м), чересчур ограниченный сектор наведения пушки в вертикальной плоскости и низкая точность стрельбы. Новая пушка решила большинство этих проблем. В вертикальной плоскости она наводится в секторе от –5° до +74°, что позволяет использовать её для борьбы с воздушными целями. Благодаря наличию двухплоскостного стабилизатора прицельную стрельбу из пушки можно вести во время движения машины.
Стрельбу из пушки можно вести одиночными выстрелами или очередями с малым (200–300 выстрелов в минуту) или большим (не менее 550 выстрелов в минуту) темпом стрельбы. Питание пушки раздельное двухленточное. Одна лента снаряжена выстрелами с бронебойно-трассирующими снарядами, а другая — выстрелами с осколочно-фугасными и осколочно-трассирующими снарядами. Таким образом, обеспечивается возможность борьбы с легкобронированными целями на дальностях до 1500 м, установками ПТУР, небронированными целями и живой силой противника на дальностях до 4000 м, а также воздушными целями, летящими с дозвуковыми скоростями на высотах до 2000 м.
Установка нового вооружения повлекла за собой изменения в конструкции башни. Для БМП-2 была разработана новая двухместная башня с сиденьями командира машины и наводчика. Она оснащена скоростными электрическими приводами наведения пушки в горизонтальной и вертикальной плоскостях. Новые приборы наблюдения и прицеливания позволяют вести огонь как наводчику, так и командиру.
Для борьбы с бронированными целями на дальности от 75 м до 4000 м на башне установлен ПТРК второго поколения 9М113М «Конкурс», а для более эффективного поражения живой силы противника на некоторых модификациях БМП-2 на левой стороне башни установлен 30-мм автоматический гранатомет АГ-17.
БМП-2 имеет расширенные возможности для постановки дымовых завес. В дополнение к термодымовой аппаратуре, на бортах башни БМП-2 смонтированы шесть дымовых гранатомётов 902В «Туча», отстреливающих на дальность 200–300 м дымовые заряды, образующие дымовую завесу размером 50?28 м.
В связи с установкой башни больших размеров число входящих в боевой расчёт БМП-2 десантников уменьшено до семи, при этом их размещение по сравнению с БМП-1 изменено: шестеро находятся в десантном отделении, а один расположен отдельно за сиденьем механика-водителя (на БМП-1 это место занимает командир машины, на БМП-2 место командира оборудовано в башне). Все десантники могут вести стрельбу из стрелкового оружия через амбразуры в бортах корпуса; для наблюдения за полем боя они пользуются перископическими приборами наблюдения.
В моторно-трансмиссионном отделении БМП-2 установлен усовершенствованный шестицилиндровый дизельный двигатель УТД-2 °C1, снабжённый системой турбонаддува. Основные узлы трансмиссии и ходовой части практически не претерпели никаких изменений. Установка новой башни привела к увеличению боевой массы машины, что, однако, не отразилось на плавучести БМП-2. Дополнительные амортизаторы на каждом втором опорном катке заметно улучшили ходовые качества машины, особенно плавность хода.

Рис. 93. БМП-2 на плаву
Несмотря на быстро изменяющуюся политическую обстановку в мире, в КБ Курганского машиностроительного завода интенсивно велись работы над созданием новой боевой машины. Усилия специалистов, искавших неординарные решения, которые отвечали бы новым требованиям, принесли свои плоды, в результате чего появилась боевая машина пехоты БМП-3.

Рис. 94. БМП-3
По конструктивной схеме БМП-3 отличается от своих предшественников. В передней части корпуса в один ряд расположены сиденья трёх членов экипажа. Среднее занимает механик-водитель, крайние — стрелки, каждый из которых обслуживает 7,62-мм пулемёт. Непосредственно за ними находится двухместная башня, в которой располагаются командир машины и наводчик. За башней в кормовой части корпуса размещается десантное отделение, рассчитанное на 5 солдат с полной выкладкой. Как и в БМП-1 и БМП-2, каждый из них может вести огонь изнутри машины через специальные стрелковые гнёзда. Солдаты десанта занимают места в машине через двери в кормовой стенке корпуса, откидные панели в крыше или люки в этих панелях.
Конструктивная схема БМП-3 существенно отличается от общепринятой схемы боевых машин пехоты. Здесь силовое отделение находится в кормовой части корпуса, за сиденьями десанта. Это позволяет более точно уравновесить машину (двигатель и трансмиссия выступают в качестве противовеса мощному бронированию передней части корпуса), что отвечает условиям стабилизации основного вооружения.
Расположение ведущих колёс в кормовой части машины является более выгодным с точки зрения работы гусеничного хода. Люки командира, наводчика и двух стрелков, сидящих по обе стороны от механика-водителя, открываются вперед и тем самым служат дополнительной защитой при спешивании или посадке в машину в непосредственной близости от противника. Люк механика-водителя приподнят и открывается назад. Такое решение продиктовано необходимостью обеспечить механику-водителю нормальный обзор при езде с поднятым сиденьем.
Настоящим шоком для зарубежных специалистов стало вооружение БМП-3. В башне кругового вращения установлена 100-мм нарезная пушка 2А70, спаренная с ней 30-мм пушка 2А72 и спаренный пулемёт калибра 7,62 мм. Стволы обеих пушек соединены хомутами, а пулемёт установлен в отдельном гнезде рядом с ними. Кроме того, впереди, по обе стороны корпуса, расположены ещё два курсовых пулемёта калибра 7,62 мм. Стрелки, обслуживающие их, имеют в своем распоряжении по одному перископу. На БМП-3 установлена система 9К116 «Бастион», которая позволяет вести из пушки стрельбу противотанковыми управляемыми снарядами 9М117. Это система второго поколения, и теперь для поражения цели наводчик должен лишь удержать её в окуляре прицела. Снаряд наводится по лазерному лучу, которым наводчик подсвечивает цель. Лазерный излучатель располагается над пушкой по оси башни. Такой способ наведения ракеты обеспечивает высокую вероятность поражения цели, но в то же время предупреждает противника об опасности, если его машина оснащена системой оповещения.
БМП-3 с одинаковым успехом способна уничтожать живую силу противника, бронетранспортёры, боевые машины пехоты, укреплённые позиции и воздушные цели. Более того, она может представлять серьёзную угрозу практически для любого современного танка.
На БМП-3 установлен четырехтактный десятицилиндровый дизельный двигатель жидкостного охлаждения УТД-29М, развивающий мощность 368 кВт. На дорогах с твёрдым покрытием БМП-3 развивает скорость около 70 км/ч при движении вперед и 20 км/ч при движении задним ходом. Запаса топлива (690 л) хватает на 600 км пробега.
Отличительной особенность БМП-3 также являются установленные водомётные движители, что существенно улучшило маневренность машины. Максимальная скорость плавания достигает 10 км/ч. Изменение направления движения на воде осуществляется при помощи заслонок водомётов. Волноотражательный щиток располагается перед лобовой плитой корпуса и при действиях на суше выполняет функцию дополнительной защиты. БМП-3 оборудована фильтровентиляционной установкой, системой пожаротушения, установленной в силовом и боевом отделениях, а также аппаратурой для постановки дымовых завес.
Общее устройство БМП-2
Боевая машина пехоты БМП-2 предназначена для повышения мобильности, вооружённости и защищённости пехоты на поле боя в условиях применения обычных средств и оружия массового поражения.
Основными частями БМП-2 являются:
1) броневой корпус и башня;
2) силовая установка;
3) трансмиссия;
4) ходовая часть;
5) электрооборудование;
6) специальное оборудование;
7) вооружение и боекомплект.
1. Броневой корпус и башня предназначены для размещения и защиты от огня противника экипажа, вооружения, механизмов и приборов машины. Корпус также предохраняет личный состав от воздействия оружия массового поражения.
Корпус является остовом, соединяющим в единое целое все агрегаты, узлы и механизмы машины, его форма обеспечивает необходимый запас плавучести и рациональное использование внутреннего объёма машины для размещения оборудования и личного состава.
Корпус состоит:
• из носовой части;
• бортов;
• кормовой части;
• крыши;
• днища;
• перегородки силового отделения.
Рис. 95. Основные части БМП-2
Рис. 96. Состав корпуса
К нижнему носовому листу приваривается два буксирных крюка и две проушины для крепления машины тросами при транспортировании. К наклонному верхнему носовому листу приварены шарниры для крепления ребристого откидного листа и волноотражательного щитка, два кронштейна для крепления фар и их ограждения, упор волноотражательного щитка.
Борта корпуса установлены вертикально, к ним приварен ряд кронштейнов, фланцев, шарниров и других деталей, обеспечивающих монтаж агрегатов и механизмов. В бортах предусмотрены амбразуры, закрываемые броневыми крышками, для ведения огня из машины.
На кормовом листе приварены петли для крепления машины тросами и стопоры для фиксации кормовых дверей в открытом положении.
Крыша состоит из съёмного и несъёмного листов. В ней предусмотрены:
• люки для посадки и высадки экипажа;
• отверстия для заправки машины топливом, маслом и охлаждающей жидкостью, для установки антенны и крепления габаритных фонарей;
• шахты для воздухозаборной трубы и приборов наблюдения.
В днище машины для удобства обслуживания агрегатов и механизмов выполнены отверстия, закрываемые пробками, и люк для доступа к двигателю, закрываемый крышкой. Пробки и крышки установлены на резиновые прокладки.
Крышка люка водителя открывается и закрывается изнутри с помощью эксцентрикового замка со стопором. Для открывания крышки необходимо снять рукоятку со стопора (оттянув её), затем опустить вниз и перевести вперёд (горизонтально). Повернув рукоятку на 180° (на себя), открыть люк, опустить рукоятку вниз и застопорить. Закрывается люк в обратной последовательности.
Крышка люка командира опирается на шариковую опору. Погон фиксируется стопором в двух положениях: прямо и влево на 90°. Запирается крышка клиновым замком. Для открывания люка изнутри нужно расстопорить крышку, повернуть её вверх и застопорить. Для открывания крышки нужно её расстопорить, отпустить вниз и застопорить поворотом рукоятки.
Люк оператора открывается поворотом рукоятки по часовой стрелке, в открытом положении фиксируется стопором.
Верхние люки десантного отделения открываются изнутри поворотом рукоятки.
Кормовые двери закрываются замками, стопорятся стопором и могут быть закрыты специальным штурвалом.
Люки и двери (за исключением люка механика водителя) могут открываться снаружи специальным ключом.
Люк над силовым отделением закрывается ребристым листом, открывается после отворачивания болтов; стопорится пружинящим стержнем.
Рис. 97. Размещение люков на крыше БМП-2
Внутренний объём корпуса разделён на четыре отделения:
• отделение управления;
• силовое отделение;
• боевое отделение;
• десантное отделение.
Отделение управления расположено в носовой части корпуса, слева. В нём размещены:
• места размещения механика-водителя и командира;
• органы управления машиной и спецоборудованием;
• центральный щиток приборов;
• приборы наблюдения и средства связи;
• фильтровентиляционная установка (ФВУ);
• узлы и приборы электроспецоборудования.

Рис. 98. Высадка десанта через кормовые двери
Рис. 99. Отделения БМП-2
Силовое отделение расположено в носовой части корпуса, справа, и отделено теплозвукоизоляционной перегородкой, в которой имеются люки для доступа к агрегатам. В нём размещены:
• агрегаты, узлы и приборы силовой установки и трансмиссии;
• компрессор;
• водооткачивающий насос.
Боевое отделение расположено в средней части корпуса машины. В нём размещены: вооружение и боекомплект; приборы наблюдения и прицеливания; места размещения командира и наводчика; баллоны ППО; укладка ЗИПа.
Десантное отделение расположено в кормовой части машины. В нём размещены:
• топливные баки и аккумуляторный отсек
• сиденья десанта;
• амбразуры для стрельбы;
• система обеспечения обитаемости;
• укладка ЗИП.
Башня — конусообразная, двухместная, сварена из броневых листов, установлена на шариковой опоре. Поворот башни осуществляется на 360° вручную или электроприводом. В лобовой части башня имеет амбразуры для пушки, пулемёта, прицелов. Внутри башни размещены пушка, пулемёт, органы управления вооружением, поворотом башни.
Рис. 100. Размещение экипажа и десанта в БМП-2
2. Силовая установка является источником механической энергии, приводящей машину в движение. Силовая установка БМП включает в себя двигатель УТД-20 и обслуживающие его системы:
• питания топливом и воздухом;
• смазки;
• охлаждения;
• подогрева;
• воздушного запуска.
Силовая установка размещается в носовой части корпуса машины, в силовом отделении.
3. Трансмиссия — совокупность агрегатов, соединяющих двигатель с ведущими колёсами. Трансмиссия БМП включает главный фрикцион, коробку передач, планетарный механизм поворота и бортовые передачи.
Трансмиссия размещена в носовой части корпуса машины в силовом отделении. Главный фрикцион, коробка передач и планетарные механизмы поворота жёстко соединены друг с другом и двигателем и образуют силовой блок.
4. Ходовая часть включает гусеничный движитель и подвеску.
5. Электрооборудование БМП включает:
• источники электрической энергии;
• потребителей электрической энергии;
• вспомогательные и контрольно-измерительные приборы.
Рис. 101. Силовая установка
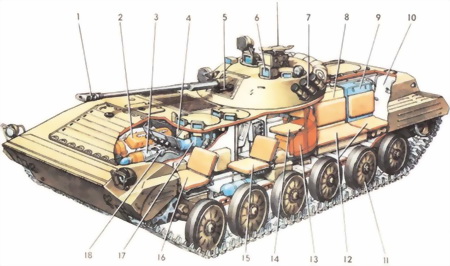
Рис. 102. Общее устройство БМП-2:
1 — орудие; 2 — двигатель; 3 — генератор; 4 — смотровой прибор механика-водителя; 5 — пулемет; 6 — смотровой прибор наводчика БМП; 7 — гранатомёт постановки дымовой завесы; 8 — топливный бак; 9 — отсек аккумуляторов; 10 — топливный бак; 11 — каток; 12 — сиденья десанта; 13 — ограждение башни; 14 — сиденье наводчика; 15 — сиденье стрелка; 16 — сиденье механика-водителя; 17 — фильтровентиляционная установка; 18 — штурвал
6. Специальное оборудование предназначено для защиты экипажа и оборудования машины и включает:
• систему защиты от ОМП;
• систему обеспечения обитаемости;
• противопожарное оборудование;
• систему дымопуска;
• приборы наблюдения;
• курсоуказатель.
7. Вооружение и боекомплект
В башне машины установлены 30#мм автоматическая пушка 2А42, пулемёт ПКТ калибра 7,62 мм (спаренный с пушкой) и пусковая установка для пуска ПТУР:
• 30-мм автоматическая пушка 2А42 предназначена для поражения наземных (легкобронированные средства, живая сила противника и т. д.) и воздушных целей;
• 7,62-мм пулемет ПКТ предназначен для поражения живой силы противника и для подавления небронированных и легкобронированных целей и огневых точек противника;
• противотанковый комплекс включает в себя ПТУР, ПУ машины и ПУ 9П135М.
В машине предусмотрены:
— крепления для личного оружия — двух ручных пулемётов ПК калибра 7,62 мм и шести автоматов АКМ калибра 7,62 мм;
— места для установки двух изделий 9К38 «Игла» или других комплексов для стрельбы по воздушным целям (вместо изделия 9К34 может устанавливаться гранатомёт РПГ-7);
— укладки для двенадцати гранат Ф-1, сигнального пистолета 56-Н-574 калибра 26 мм, двенадцати осветительных ракет, четырёх ПТУР.
Общие сведения о БТР
Первые машины начали поступать в части в середине 1960 года. Серийное производство БТР-60П осуществлялось на Горьковском автозаводе до 1963 года. БТРП (так условно называется машина — бронированное транспортное средство плавающее, он же ГАЗ-49) имеет несущий сварной бронекорпус с плоским дном, передним расположением отделения управления и кормовым размещением силовой установки, четыре ведущих моста с независимой подвеской всех колёс. В каждом колесе имеется встроенный редуктор, используемый для увеличения дорожного просвета. По воде машина передвигается как за счёт гребного эффекта вращающихся колес, так и при помощи специального водомётного движителя реактивного типа.
В средней части корпуса находится десантное отделение, вмещающее 8 человек, в котором стрелки находятся лицом к борту машины. Для ведения огня из автоматов в бортах машины имеется 6 амбразур.
Между полом десантного отделения и днищем машины установлены агрегаты трансмиссии. Открытый сверху корпус является несущим, имеет обтекаемую форму нижней части и днища и изготовлен из катаных броневых листов толщиной 6–8 мм.

Рис. 103. БТР-60
Колеса первой и второй осей управляемые. В подвеске используются 8 торсионных валов и 12 телескопических гидроамортизаторов. На крайних узлах подвески установлены по 2 гидроамортизатора. Пулестойкие шины большого профиля (13–18 дюймов) имеют центральную систему регулирования давления воздуха. Широкая колея позволяет двигаться за танками, а четыре равномерно расположенных оси дают возможность преодолевать рвы шириной до 2 м. В передней части корпуса установлена лебёдка с длиной троса 50 м.
На кронштейнах лобового и бортовых листов корпуса установлен 7,62 мм пулемёт, боекомплект которого составляет 1250 патронов. БТР оснащён ночными приборами водителя ТВН-2 и командира ТКН-1, радиостанцией Р-123.
Полная масса БТР — 9800 кг. На БТР установлено 2 двигателя ГАЗ-40П. Двигатели смонтированы параллельно каждый со своими агрегатами трансмиссии на одной общей раме, но сблокированы не сами двигатели, а только их приводы управления. Блоки двигатель — коробка передач (четырехскоростные, с синхронизаторами) располагаются параллельно на корме БТР, раздаточные коробки — в средней части корпуса. От правого двигателя приводятся в действие колёса первого и третьего мостов (а также лебедка), от левого двигателя — колёса второго и четвёртого мостов.
БТР-70 был принят на вооружение 21 августа 1972 г. Компоновка БТР-70 в целом повторяет компоновку БТР-60. В передней части корпуса находится отделение управления с местами командира машины и механика-водителя. За отделением управления расположено десантное отделение, а в кормовой части корпуса — моторно-трансмиссионное. Командир машины и механик-водитель вне поля боя ведут наблюдение через 2 ветровых стекла, оборудованных стеклоочистителем и обогревательным устройством. В боевом положении стёкла закрываются броневыми крышками, и командир ведёт наблюдение через три перископические прибора ТНП-Б и ТНПКУ-2Б, а механик-водитель — через четыре прибора ТНП-Б. Для доступа в отделение управления в крыше корпуса имеется два люка.
Закрытый герметичный корпус бронетранспортёра сварен из катаных листов броневой стали. Лобовые детали имеют толщину 8–10 мм. Башня также имеет сварную конструкцию, в передней части толщина её брони составляет 6 мм. По сравнению с БТР-60 высота корпуса и бронетранспортёра в целом уменьшена на 185 мм.
Важными новыми элементами конструкции корпуса стали два небольших нижних боковых люка, смонтированные по обе стороны корпуса между второй и третьей парами колёс. Люки предназначены для скрытой посадки и спешивания десанта. Дополнительные люки имеются также в крыше десантного отделения.
Десантное отделение рассчитано на размещение шести мотострелков. Они располагаются на сиденьях лицом к бортам, что позволяет им вести стрельбу со своих мест. Для этого в бортах корпуса имеется шесть закрывающихся броневыми крышками амбразур. Для ведения наблюдения за полем боя в десантном отделении с каждого борта установлено по одному прибору ТНП-Б. Ещё один десантник располагается в передней части корпуса, по другую сторону от него находится стрелок пулемётной установки.

Рис. 104. БТР-70
Бронетранспортёр БТР-70 имеет то же вооружение, что и БТР-60: в бронированной башне кругового вращения установлены 14,5-мм пулемёт КПВТ (крупнокалиберный пулемет Владимирова) и 7,62-мм пулемёт ПКТ (пулемёт Калашникова танковый). Был разработан опытный образец БТР-70 с автоматическим гранатомётом АГ-17, смонтированным на башне, но серийно эта модель не выпускалась.
БТР-70 имеет силовую установку повышенной мощности. В моторно-трансмиссионном отделении в кормовой части корпуса на общей раме установлено два V-образных восьмицилиндровых карбюраторных двигателя ГАЗ-49Б мощностью по 120 л.с. каждый. Для улучшения циркуляции охлаждающей жидкости установлен ручной насос. Охлаждение масла производится в двух радиаторах и теплообменниках. Применение работающих на бензине карбюраторных двигателей сопряжено с повышенной пожароопасностью. Для её снижения топливные баки расположены в изолированных отсеках, бронетранспортёр оборудован также автоматической противопожарной системой. Имеется система отключения силовой передачи от двигателя с места механика-водителя, которая позволяет при выходе из строя одного двигателя быстро отключить его и продолжать движение на другом, исправном.
Как и у БТР-60, ходовая часть выполнена по колесной формуле 8?8. управляемыми являются первые две пары колес, при этом минимальный радиус поворота составляет 12,6 м. Подвеска торсионная, колёса с разъёмным ободом, шины бескамерные, сверхнизкого давления. Имеется система централизованного регулирования давления воздуха в шинах. Наличие в этой системе мощных компрессоров позволяет не только регулировать давление в шинах в зависимости от условий движения, но и компенсировать потерю давления при простреле шины.
При движении по шоссе бронетранспортер БТР-70 развивает максимальную скорость 80 км/ч. Он обладает очень высокой проходимостью по пересечённой местности. Бронетранспортёр плавает со скоростью 9–10 км/ч, которая обеспечивается двухступенчатым водомётным движителем. Запас хода на плаву составляет 12 ч.
При разработке БТР-70 большое внимание было уделено его оборудованию для ведения действий в условиях применения ядерного оружия и других средств массового поражения. На нем размещены фильтровентиляционная установка в составе нагнетателя-сепаратора и фильтра-поглотителя, прибор радиационной разведки ДП-3Б, войсковой прибор химической разведки ВПХР и комплект для специальной обработки. В состав оборудования БТР-70 входят: радиостанция Р-123М, переговорное устройство, отопитель, лебёдка для самовытаскивания.
БТР-80 был принят на вооружение Советской Армии в 1986 г. и в том же году был запущен в серийное производство. Он разработан по той же компоновочной схеме, что и его предшественники.
Герметичный, полностью закрытый корпус бронетранспортёра сварен из катаных стальных листов, расположенных с большими углами наклона к вертикали. Он защищает экипаж и десантников от пуль ручного стрелкового оружия калибра 7,62-мм, а лобовая броня — от пуль калибра 12,7-мм.

Рис. 105. БТР-80
В отделении управления оборудованы места механика-водителя (у левого борта) и командира машины. В их распоряжении находятся перископические приборы наблюдения ТНП-Б и командирский прибор наблюдения ТКН-3.
За местами механика-водителя и командира установлены одноместные сиденья одного из пехотинцев десанта и стрелка башенной пулемётной установки. Как и у БТР-70, основное вооружение БТР-80 состоит из 14,5-мм пулемета КПВТ и спаренного с ним 7,62-мм пулемета ПКТ. Пулемёты установлены в конической башне с углами наведения 360° по горизонтали и от –4° до +60° по вертикали. Для освещения целей при стрельбе ночью на консоли пулеметной установки смонтирован осветитель ОУ-3ГА2М. На башне также установлены дымовые гранатомёты для стрельбы гранатами 3Д6.
Основная часть десанта — 6 мотострелков — располагается лицом к борту на двух сиденьях, смонтированных вдоль продольной оси корпуса. Для ведения десантниками стрельбы в бортах корпуса имеется семь амбразур, выполненных с разворотом по курсу. Две амбразуры предназначены для стрельбы из пулемётов. Амбразуры снабжены шаровыми опорами, позволяющими стрелять без разгерметизации десантного отделения на зараженной местности, так как фильтровентиляционная установка создает внутри корпуса избыточное давление. Кроме амбразур в бортах и лобовом бронестекле, дополнительно имеется по одной амбразуре в бронированных люках крыши десантного отделения. Через полуоткрытые люки можно вести стрельбу по противнику на склонах гор. Кроме двух люков в крыше корпуса, для посадки и спешивания десанта используются двухстворчатые двери на обоих бортах бронетранспортёра. Одна створка двери откидывается вверх, а другая спускается вниз и образует подножку, благодаря чему в случае необходимости посадка и спешивание десанта могут производиться при движении машины.
Важным фактором повышения «живучести» БТР-80 на поле боя стало использование вместо пожароопасных карбюраторных двигателей V-образного восьмицилиндрового дизельного двигателя КамАЗ-7403 с жидкостным охлаждением и турбокомпрессорным наддувом. При 2600 об/мин он развивает максимальную мощность в 260 л. с. С 1993 г. БТР-80 выпускается с двигателем ЯМЗ-238М2 мощностью 240 л.с., который выполнен в виде единого блока со сцеплением и коробкой передач и размещен в моторно-трансмиссионном отделении в кормовой части корпуса. Здесь же установлены водяные и масляные радиаторы, теплообменники, маслоохладитель коробки передач, предпусковой подогреватель двигателя, водомётный движитель, водооткачивающий насос, фильтровентиляционная установка, топливные баки, генераторы и другое оборудование.
Ходовая часть БТР-80 выполнена по традиционной для этого семейства машин колёсной формуле 8?8 с двумя парами передних управляемых колёс. Несмотря на применение в силовой установке одного двигателя вместо двух, оригинальная конструкция раздаточной коробки позволила использовать в БТР-80 многие узлы и детали его предшественника БТР-70 с незначительными изменениями. Это способствовало быстрейшей организации производства бронетранспортёра и освоению его в войсках. На БТР-80 использована индивидуальная торсионная подвеска. На колёсах установлены бескамерные шины сверхнизкого давления, имеется центральная система регулирования давления воздуха в шинах, благодаря чему БТР-80 обладает проходимостью, сравнимой с проходимостью гусеничных машин.
На колёсах бронетранспортёра могут устанавливаться также пулестойкие шины КИ-80 или КИ-126, позволяющие при многократном простреле их пулями всех калибров и полном отсутствии в них давления воздуха пройти ещё несколько сотен километров.
Благодаря использованию мощного дизельного двигателя БТР-80 по шоссе развивает скорость 80–90 км/ч, на плаву — 10 км/ч. Последнее осуществляется за счёт водомётного движителя.
В состав оборудования БТР-80 входят радиостанция Р-123М и танковое переговорное устройство Р-124 (на машинах более позднего выпуска установлено устройство Р-174), средства защиты от ОМП (в том числе фильтровентиляционная установка, прибор радиационной разведки ДП-3Б и прибор химической разведки ВПХР), автоматическая противопожарная система и лебёдка для самовытаскивания.
Новый бронетранспортёр выпускается на филиале ГАЗа — Арзамасском машиностроительном заводе. Прежде на БТР-80 устанавливался дизель КамАЗа или ЯМЗ-238, а новый силовой агрегат (челябинский многотопливный турбодизель А-58 мощностью 510 л. с. и гидромеханическая КПП) заимствован у боевой машины десанта БМД-3. Привод на колёса необычен: поток мощности распределяется отдельно на колёса правого и левого борта, а благодаря дополнительной гидрообъёмной передаче БТР-90 может, подобно гусеничной машине, буквально вертеться на одном месте.

Рис. 106. БТР-90
Новая независимая торсионная подвеска и шины с регулировкой давления позволяют развивать на шоссе скорость до 100 км/ч, а благодаря двум водомётам БТР-90 уверенно плывет при волне до 3 баллов. Если раньше на БТРе стояли только спаренные пулемёты (калибра 14,5 и 7,62-мм), то теперь бронетранспортёр вооружён «до зубов»: в придачу к автоматической 30-мм пушке и 7,62-мм пулемёту ПКТ в башне стоят гранатомёт и противотанковый ракетный комплекс «Конкурс». Сама башня имеет стабилизацию в двух плоскостях.
Таблица 16
Сравнительная характеристика модификаций БМП
| Характеристика | БМП-1 | БМП-2 | БМП-3 | |
|---|---|---|---|---|
| 1 | Боевая масса, кг | 12600 | 13700 | 18700 |
| 2 | Расчёт (экипаж/десант) | 3/8 | 3/7 | 3/7 |
| 3 | Скорость движения, км/ч: | |||
| по шоссе | 65 | 65 | 72 | |
| по грунтовой дороге | 40–45 | 40–50 | 40–50 | |
| на плаву | 7 | 7 | 10 | |
| 4 | Двигатель | УТД-20 многотопливный | УТД-2 °C1 многотопливный | УТД-29 многотопливный |
| 5 | Мощность, л.с. | 300 | 300 | 500 |
| 6 | Запас топлива, л | 462 | 460 | 480 |
| 7 | Запас хода, км | 600 | 550–600 | 600–650 |
| 8 | Вооружение (боекомплект) | 1) 73 мм пушка 2А28 «Гром» (40); 2) 7,62 мм спаренный пулемет ПКТ (2 000); 3) ПУ ПТРК 9М14М «Малютка» (4) | 1) 30 мм пушка 2А42 (500); 2) 7,62 мм спаренный пулемет ПКТ (2000); 3) ПУ ПТРК 9М111 / 9М113 «Конкурс» (4); 4) ПЗРК 9К34 «Стрела-3» или РПГ-7 (2) | 1) 100 мм пушка — ПУ 2А70 (22+18); 2) 30 мм автоматическая пушка 2А72 (500); 3) 7,62 мм спаренный пулемёт ПКТ (6 000, общий); 4) 7,62 мм курсовой пулемёт ПКТ — 2 шт. 5) ПТРК 9К116 «Бастион» — (4 ПТУР 9М117); 6) ПЗРК 9К310 «Игла-1»/ 9К38 «Игла» (2); 7) РПГ-7/18 (5) |
| 9 | Компоновочная схема | Моторно-трансмиссионное отделение — спереди, боевое — в центре, десантное — сзади | Моторно-трансмиссионное отделение — спереди, боевое — в центре, десантное — сзади | Отделение управления — спереди, боевое и десантное — в центре, моторно-трансмиссионное — сзади |
| 10 | Бронирование | Броня стальная катаная | Броня стальная катаная гомогенная (противопульная, противоосколочная) | Броня алюминиевая катаная |
| 11 | Год принятия на вооружение | 1966 | 1980 | 2005 |
Таблица 17
Сравнительная характеристика модификаций БТР
| Характеристика | БТР-60 | БТР-70 | БТР-80 | БТР-90 | |
|---|---|---|---|---|---|
| 1 | Боевая масса, кг | 9900 | 11500 | 13600 | 20920 |
| 2 | Расчёт (экипаж/десант) | 2/8 | 3/7 | 2/8 | 2/8 (3/7) |
| 3 | Скорость движения, км/ч: | ||||
| по шоссе | 80 | 80 | 80 | 100 | |
| по грунтовой дороге | 40 | 45 | 40 | 45 | |
| на плаву | 10 | 10 | 9 | 9 | |
| 4 | Двигатель | 2 ? ГАЗ-49 | 2 ? ГАЗ-49Б | КамАЗ-7403 | Многотопливный двигатель |
| 5 | Мощность двигателя, л.с. | 2?90 | 2?120 | 260 | 510 |
| 6 | Запас топлива, л | 290 | 290 + 120 | 300 | 300 |
| 7 | Запас хода, км | 500 | 450 | 600 | 800 |
| 8 | Вооружение (боекомплект) | 14,5 мм пулемёт КПВТ (500) + спаренный с ним 7,62 мм пулемёт ПКТ (2000) | 1) 14,5 мм пулемёт КПВТ (500); 2) 7,62 мм пулемёт ПКТ (2000); 3) гранатомёт РПГ-7 (два автоматических гранатомёта АГС-17) | Спаренные пулемёты: 1) 14,5 мм КПВТ (500); 2) 7,62 мм ПКТ (2000) | 1) 30 мм автоматическая пушка 2А42 (500); 2) 7,62 мм пулемёт ПКТ (2000); 3) гранатомёт 30 мм АГ-17 (400); 4) ПТРК (4) |
| 9 | Компоновочная схема | 8?8 | |||
| 10 | Защита | противопульная | |||
| 11 | Год принятия на вооружение | 1959 | 1972 | 1986 | 1990 |
Одно только плохо: хотя БТР-90 выигрывает у своих предшественников по ходовым качествам, защите и вооружению, он не стал компактнее. Внешними отличиями нового БТР-90 являются установленный в задней левой части башни вынесенный автоматический гранатомёт АГ-17 «Пламя» с дистанционным приводом, новый инфракрасный прожектор с теплозащитным кожухом, буфер с фарами в носовой части. Бронирование машины усилено за счёт установки накладных бронеплит.
Автоматический гранатомёт позволяет уничтожать открыто расположенную и укрытую в окопах и складках местности живую силу противника на дальностях до 1700 м. Управление осуществляется наводчиком. Установка с гранатомётом стабилизирована в вертикальной плоскости, по горизонтали она наводится поворотом башни. Колёсная формула осталась прежней — 8?8.
Многоцелевой тягач лёгкий бронированный (МТ-ЛБ)
За свою сорокалетнюю историю МТ-ЛБ завоевал большую популярность как у нас, так и за рубежом. Наверно, называя машину «многоцелевой тягач», его создатели не предполагали, что она станет основой для более чем 80 модификаций — от бронетранспортёра до боевых комплексов. Парк этих машин составляет около двух десятков тысяч. И по сей день они остаются незаменимыми в районах Дальнего Востока и Крайнего Севера, где одним из важнейших показателей для боевых машин является проходимость.
Родиной этой уникальной машины является Харьков — город, давший жизнь не одному знаменитому образцу бронетанковой техники. Здесь стоит вспомнить легендарные БТ-7, Т-34 или революционный Т-64. Но, в отличие от своих «земляков», МТ-ЛБ разрабатывался не в стенах паровозостроительного завода, а в КБ Харьковского тракторного под руководством А. Белоусова.
Техническое задание на разработку было выдано в конце 1950-х в связи с появлением новых артиллерийских систем и изменившейся концепцией их боевого использования. Выпускаемые в то время на Курганском машиностроительном заводе гусеничные артиллерийские тягачи были легко уязвимы от огня стрелкового оружия и осколков снарядов, имели высокий силуэт и не могли преодолевать глубокие броды.
С принятием на вооружение Советской Армии 100-мм гладкоствольной противотанковой пушки МТ-12 «Рапира», 100-мм пушки БС-З и 122-мм гаубицы Д-30 стал необходим бронированный тягач с низким силуэтом, с высокими характеристиками подвижности, способный не только буксировать артиллерийскую систему, но и перевозить под прикрытием брони её расчёт и боекомплект. Однако, созданная на ХТЗ машина оказалась настолько удачной, что за её исходным предназначением вскоре увиделись и многие другие возможности. Тягач превратился в универсальную базу, на которой было построено целое семейство боевых и вспомогательных бронированных машин. На базе МТ-ЛБ были созданы машины управления для различных родов войск, самоходно-артиллерийские установки и установки самоходных зенитных и противотанковых ракетных комплексов, и даже авиатранспортабельные дорожно-землеройные машины.
Компоновка машины несколько необычна для отечественного танкостроения. Трансмиссия в МТ-ЛБ расположена спереди, а двигатель размещён в средней части корпуса машины с некоторым смещением к левому борту относительно продольной оси. Между трансмиссионным отделением и двигателем находится отделение управления. За счёт смещения двигателя в сторону левого борта имеется проход из отделения управления в десантное (грузовое).
В отделении управления с левой стороны размещается механик-водитель, а справа от него — командир машины. Чтобы было удобно вести наблюдение из транспортёра, отделение оборудовано двумя стеклоблоками (как на БТР-60), которые в боевой обстановке закрываются броневыми крышками. При этом наблюдение за дорогой механиком-водителем ведётся через три призменных смотровых прибора ТНПО-170А, центральный из которых может быть заменен прибором ночного видения ТВН-2Б. Своё место механик-водитель обычно занимает через люк, расположенный над его сиденьем в крыше машины. Справа в носовой части над местом командира установлена бронированная коническая башенка ТКБ-01 кругового вращения. В нее смонтирован 7,62-мм пулемёт ПКТ. Наведение оружия на цель командир осуществляет вручную. Люк для командира оборудован левее башенки в крыше машины, практически на её продольной оси.

Рис. 107. МТ-ЛБ
Десантное (грузовое) отделение, расположенное в кормовой части машины, первоначально предназначалось для размещения в нём артиллерийского расчёта буксируемого орудия и боекомплекта к нему. В дальнейшем, когда МТ-ЛБ стал использоваться в качестве бронетранспортёра для мотострелков, десантное отделение было дооборудовано для посадки 11 полностью экипированных пехотинцев. Десант располагается вдоль бортов машины на сиденьях, установленных поверх топливных баков. Для посадки, спешивания и погрузки имущества используются двустворчатая дверь в кормовом бронелисте и два люка в крыше десантного отделения. Десантники могут вести огонь из индивидуального оружия, для чего в бортах корпуса машины сделаны четыре закрываемые броневыми крышками амбразуры. Машина оборудована отопителем и фильтровентиляционной установкой (ФВУ).
Корпус МТ-ЛБ сварен из катаных броневых листов и обеспечивает защиту экипажа и десанта от пуль ручного огнестрельного оружия, осколков артиллерийских снарядов и мин малого калибра. Корпус выполнен герметичным, что позволяет машине преодолевать водные преграды вплавь при номинальной грузоподъёмности до 2 т. Движение на воде осуществляется за счёт перемотки гусениц. Перед преодолением водной преграды в передней части корпуса машины поднимается волноотражающий щиток, а сзади с обеих сторон опускаются и фиксируются гидродинамические щитки. На крыше машины устанавливается небольшая воздухопитающая труба. На случай попадания внутрь корпуса воды для её откачки имеется водооткачивающая помпа производительностью до 450 л/мин. С ней машина плавает даже при потере 30 % плавучести.
Подвеска МТ-ЛБ независимая торсионная с гидравлическими телескопическими амортизаторами на первых и последних узлах. Она обеспечивает машине хорошую плавность хода по пересечённой местности. Гусеничная лента имеет ширину трака 350 мм, что создает относительно небольшое удельное давление на грунт и обеспечивает МТ-ЛБ высокую проходимость по грунтам со слабой несущей способностью. В заснеженных или заболоченных районах для повышения проходимости на машину могут устанавливаться специальные гусеничные ленты с шириной траков 565 мм. Тягач с такой гусеницей, получивший обозначение МТ-ЛБВ, имеет удельное давление на грунт всего 0,28 кг/см?, т. е. меньше, чем у человека! По сухому грунту машина с грузом преодолевает подъём крутизной до 35°, а с прицепом — до 25°.
Часть машин оснащалась оборудованием для самоокапывания, которое было установлено в кормовой части.
Оригинальная трансмиссия с двойным подводом мощности обеспечивает МТ-ЛБ разворот вокруг своей оси с радиусом, равным половине ширины машины, что особенно важно при движении на узких горных дорогах или в лесистой местности. При таких показателях транспортёр оказывался зачастую единственным средством передвижения в труднодоступных районах Дальнего Востока, Сибири и Крайнего Севера. В этих районах МТ-ЛБ использовался как бронетранспортёр, и им оснащались мотострелковые подразделения некоторых соединений.
Для ПВО общевойсковых частей на базе МТ-ЛБ была создана боевая машина самоходного ЗРК 9К35 «Стрела-10». В зенитном дивизионе мсбр может использоваться в качестве подвижного средства стрелков-зенитчиков зенитного отделения зенитной ракетной батареи ПЗРК.

Рис. 108. ЗРК «Стрела-10»
Поскольку с распадом СССР абсолютно все заводы, производящие машины семейства МТ-ЛБ, остались за пределами России (Украина, Болгария, Польша), закупок этой техники с 1990 г. не было. А в войсках остались тысячи машин со сроком эксплуатации более 10 лет. Ещё немного, и они могли бы стать просто грудой металла. Да и по своим боевым характеристикам МТ-ЛБ за 40 лет заметно подотстал. В сложившихся экономических обстоятельствах и при отсутствии в России базовых заводов по выпуску таких машин вопрос о проведении в промышленных масштабах их капитального ремонта и повышении военно-технического уровня стал весьма актуальным. Возникла необходимость основательно модернизировать МТ-ЛБ, чтобы привести его тактико-технические характеристики в соответствие с современными требованиями. И такие программы, позволившие поднять боевые свойства машины на новый качественный уровень, в России были разработаны.
Таблица 18
Основные технические характеристики
| 1 | Масса заправленного тягача, кг: | |
|---|---|---|
| без груза и экипажа | 9700 | |
| полная | 12200 | |
| 2 | Грузоподъёмность, кг: | |
| номинальная, при буксировке прицепов | 2000 | |
| максимальная, при перевозке грузов без прицепа | 2500 | |
| 3 | Масса буксируемого прицепа, кг | 6500 |
| 4 | Количество посадочных мест в кабине/кузове | 2/11 |
| 5 | Скорость, км/ч: | |
| по шоссе | 61,5 | |
| на плаву | 6 | |
| 6 | Двигатель | ЯМЗ-238 дизель |
| 7 | Мощность двигателя, л.с. | 240 |
| 8 | Средний расход топлива на 100 км пути, л | 100–135 |
| 9 | Год принятия на вооружение | 1964 |
В нашей стране решением этой задачи занимались конструкторы СКБ ОАО «Муромтепловоз», где для этого имелись все необходимые условия. Предприятие располагало полным комплектом конструкторской документации на машины семейства МТ-ЛБ. И самое главное — квалифицированные специалисты СКБ уже имели опыт по созданию образцов военной техники, в том числе и гусеничных машин. Когда налаживался процесс капитального ремонта МТ-ЛБ, сложились устойчивые творческие связи между коллективом конструкторов и научными организациями МО РФ, промышленности. Осваивая капитальный ремонт транспортёров и выпуск запчастей к ним, на предприятии сумели провести значительный объём работ, разработали и изготовили испытательные стенды, обзавелись современным технологическим оборудованием.
Кроме этого, быстроходный гусеничный транспортёр — тягач МТ-ЛБ — может использоваться для ликвидации последствий аварий и чрезвычайных ситуаций в труднодоступных районах, в качестве шасси под монтаж различного технологического оборудования, для обслуживания транспортных и технологических магистралей, транспортировки людей и грузов в закрытом отапливаемом кузове, буксировки прицепов и т. д.
Автомобиль ГАЗ-66
Разработка грузового автомобиля повышенной проходимости ГАЗ-66 началась на Горьковском автомобильном заводе в начале 60-х гг. При проектировании использовался опыт создания лёгкого грузовика с кабиной над двигателем ГАЗ-62 для увеличения площади грузовой платформы при минимальной длине. ГАЗ-66 стал первым серийным отечественным грузовиком с V-образным 8-цилиндровым двигателем. Запасное колесо было размещено вертикально за кабиной, что позволило понизить уровень пола грузовой платформы. Среди особенностей конструкции такие: гипоидная главная передача, цельнометаллическая грузовая платформа, гидровакуумный усилитель в приводе тормозов, гидроусилитель руля, омыватель лобового стекла.

Рис. 109. ГАЗ-66
Первая опытно-промышленная партия была изготовлена в ноябре 1963 г., а серийное производство началось 1 июля 1964 г. В 1967 г. ГАЗ-66 был удостоен Золотой медали Лейпцигской ярмарки. В 1969 г. он первым из отечественных автомобилей был удостоен Государственного знака качества.
Конструкция ГАЗ-66 рамная. Для увеличения проходимости применены полный привод, короткие передний и задний свесы, система регулирования давления в шинах. Кузов — металлическая платформа с высокими решетчатыми бортами и открывающимся задним бортом — оснащён откидными скамейками вдоль бортов. Предусмотрена установка тента на 5 дугах. Кабина двухместная цельнометаллическая, имеет отопитель и омыватель лобового стекла. В кабине предусмотрена установка подвесного спального места. Для доступа к двигателю кабина откидывается вперёд.
В качестве силовой установки применен карбюраторный четырёхтактный 8-цилиндровый V-образный верхнеклапанный двигатель жидкостного охлаждения ЗМЗ-66 (модификация ЗМЗ-53, отличается местом расположения генератора). Двигатель оснащён предпусковым подогревателем ПЖБ-12. Сцепление однодисковое сухое с гидравлическим приводом. Коробка передач четырёхступенчатая с синхронизаторами на III и IV передачах. Раздаточная коробка двухступенчатая. Главная передача одинарная гипоидная. Передний мост оснащён шариковыми шарнирами равных угловых скоростей. Передний мост отключаемый. Подвеска всех колёс зависимая рессорная с гидравлическими телескопическими амортизаторами двустороннего действия. Рулевой механизм снабжён гидроусилителем. Рабочий тормоз барабанный на все колёса с гидравлическим приводом и гидровакуумным усилителем. На некоторых модификациях впереди устанавливалась лебёдка для самовытаскивания с приводом от двигателя через коробку отбора мощности.
Автомобиль ГАЗ-66 предназначен для перевозок грузов и людей по всем видам дорог и по бездорожью. На его базе выпускались сотни различных моделей специализированных автомобилей. В 1984 г. семейство ГАЗ-66 было модернизировано: установлены более мощный двигатель, изменена тормозная система, установлен знак автопоезда на крыше кабины. Новые модификации начали сходить с конвейера в январе 1985 г. В 1993 г. появилась дизельная модификация. Официально ГАЗ-66 снят с производства 1 июля 1999 г., но и после этого продолжалась сборка из задела деталей по индивидуальным заказам.
Таблица 19
Основные технические характеристики
| 1 | Габариты длина/ширина/высота, мм | 5655/2322/2440 |
|---|---|---|
| 2 | Колея, мм | 1800/1750 |
| 3 | Дорожный просвет, мм | 315 |
| 4 | Радиус поворота, м | 9,5 |
| 5 | Масса в снаряжённом состоянии/полная, кг | 3470/5800 |
| 6 | Грузоподъёмность, кг | 2000 |
| 7 | Допустимая масса буксируемого прицепа, кг | 2000 |
| 8 | Двигатель: | |
| тип | ЗМЗ-66 | |
| число цилиндров | 8 | |
| рабочий объём, см? | 4254 | |
| мощность, л.с. | 115 | |
| 9 | Число передач | 4?2 |
| 10 | Колёсная формула | 4?4 |
| 11 | Размер шин | 12,00–18″ |
| 12 | Запас топлива, л | 2?105 |
| 13 | Скорость максимальная, км/ч | 90 |
| 14 | Запас хода, км | 875 |
| 15 | Глубина преодолеваемого брода, м | 1,0 |
| 16 | Максимальный преодолеваемый подъём | 30° |
| 17 | Контрольный расход топлива при скорости 30–40 км/ч, л/100 км | 24 |
Автомобиль ЗИЛ-131
Одновременно с созданием на базе ЗИС-151 модернизированного полноприводного армейского грузовика ЗИС-157 конструкторы Московского автозавода им. Сталина (с 1956 г. — им. Лихачёва) под руководством главного конструктора А.М. Кригера решили разработать принципиально новый автомобиль.
Основные идеи (проходные мосты, блокируемые межосевые и межтележечные дифференциалы, шины большого диаметра с регулируемым давлением воздуха, верхнеклапанный двигатель) были опробованы на экспериментальном автомобиле ЗИС-128. С учётом выявленных во время его испытаний недостатков в 1956 г. был построен опытный образец ЗИС-131, унифицированный с перспективным семейством ЗИС-130. Так как ЗИС-131 был изготовлен раньше ЗИС-130, на нём ещё стоял рядный 6-цилиндровый двигатель.
В 1959 г. состоялись заводские, а затем приёмочные испытания опытных образцов ЗИЛ-131. На 1961–62 гг. было запланировано внедрение в производство без остановки конвейера ЗИЛ-130 и ЗИЛ-131. Но из-за различных трудностей производственного характера работы затянулись. ЗИЛ-130 начал выпускаться с 1 октября 1964 г., а более сложный по конструкции ЗИЛ-131 попал на конвейер только в 1967 г. Но задержка пошла на пользу: за это время конструкторы успели сделать автомобиль более совершенным и разработать его модификации. По сравнению с ЗИС-157 у него была больше грузоподъёмность, выше скорость, ниже расход топлива на тонну перевозимого груза, на метр меньше радиус поворота, более комфортабельная кабина и более мягкая подвеска (за счёт применения удлинённых рессор). В феврале 1974 г. семейству ЗИЛ-131 присвоен Государственный знак качества. В октябре 1987 г. началось производство ЗИЛ-131 и на Уральском автомоторном заводе (г. Новоуральск Свердловской области).

Рис. 110 ЗИС-131
ЗИЛ-131 имеет капотную компоновку. Кабина цельнометаллическая трёхместная с панораменым стеклом (от ЗИЛ-130). Кузов деревянный с задним откидным бортом, оборудован откидными скамейками, дугами и тентом. Для увеличения проходимости применены полный привод, короткие передний и задний свесы, односкатная ошиновка, система регулирования давления в шинах (от 0,5 до 4,2 кгс/см?), равная колея всех мостов и расположение их картеров в одну линию (средний мост проходного типа). Герметизация агрегатов, отключаемые система вентиляции картера двигателя и вентилятор системы охлаждения позволяют преодолевать брод до 1,4 м (кратковременно до 1,5 м).

Рис. 111. ЗИЛ-131
Таблица 20
Основные технические характеристики
| 1 | Габариты, мм: | |
|---|---|---|
| длина/ширина | 7040/2500 | |
| высота по кабине/высота с тентом | 2480/2975 | |
| 2 | Колея, мм | 1820 |
| 3 | Дорожный просвет, мм | 330/355 |
| 4 | Радиус поворота, м | 10,2 |
| 5 | Масса в снаряжённом состоянии с лебёдкой/полная, кг | 6700/10425 |
| 6 | Грузоподъёмность по шоссе/грунту, кг | 5000/3500 |
| 7 | Число передач | 5?2 |
| 8 | Колёсная формула | 6?6 |
| 9 | Допустимая масса буксируемого прицепа по шоссе/грунту, кг | 6500/4000 |
| 10 | Мощность двигателя, л.с. | 150 |
| 11 | Запас топлива, л | 2?170 |
| 12 | Скорость максимальная, км/ч | 90 |
| 13 | Запас хода, км | 850 |
| 14 | Глубина преодолеваемого брода, м | 1,4 |
| 15 | Тормозной путь со скорости 30 км/ч, м | 12 |
| 16 | Контрольный расход топлива при скорости 40 км/ч, л/100 км | 40 |
Силовая установка состоит из 8-цилиндрового V-образного карбюраторного верхнеклапанного двигателя ЗИЛ-131. Для движения по пыльным дорогам установлен пеномасляный фильтр с трёхступенчатой очисткой воздуха. Топливный насос повышенной производительности обеспечивает бесперебойную работу в условиях высоких температур. Сцепление однодисковое сухое. Коробка передач пятиступенчатая с синхронизаторами на II, III, IV и V передачах. Раздаточная коробка двухступенчатая, выполнена по двухвальной схеме. Главная передача двухступенчатая (конические и цилиндрические шестерни). Рулевое управление снабжено гидроусилителем. Подвеска на продольных полуэллиптических рессорах. Передний мост отключаемый, оснащён шариковыми шарнирами равных угловых скоростей. Рабочий тормоз барабанный на все колёса с раздельным пневматическим приводом. Часть машин оборудовалась лебёдкой для самовытаскивания.
ЗИЛ-131 долгое время был одним из самых распространённых грузовиков Советской Армии. Применялся он и в гражданских организациях. Его отличала лёгкость управления, хорошая манёвренность, устойчивость движения. В процессе производства конструкция постоянно дорабатывалась. На шасси ЗИЛ-131 было разработано и освоено множество специализированных автомобилей. Годовой выпуск в 1989 г. достиг 48 тыс. автомобилей (из них 8 тыс. — на УАМЗе).
Выпуск ЗИЛ-131Н на Московском автозаводе прекратился в 1990 г. Всего было выпущено 998429 автомобилей всех модификаций. Производство на Уральском автомоторном заводе продолжалось до 2002 г. На конвейере его сменил ЗИЛ-433420.

Рис. 112. ЗИЛ-433420
Автомобиль КамАЗ-4310
В 1969 г. в Набережных Челнах началось строительство комплекса заводов по производству большегрузных автомобилей и дизельных двигателей. Одновременно рядом заводов Министерства автомобильной промышленности СССР началась разработка семейства перспективных автомобилей для него. Семейство включало в себя и полноприводные автомобили, предназначенные главным образом для армии. Проектирование велось в УКЭР ЗИЛа под руководством главного конструктора В.А. Вязмина. Общее руководство осуществлял А.М. Кригер. Для удешевления производства и эксплуатации конструкция создавалась унифицированной по многим узлам и агрегатам с другими грузовиками КамАЗа.

Рис. 113. КамАЗ-4310
С пуском КамАЗа в 1976 г. в серию в первую очередь пошли народнохозяйственные модели. После их освоения настала очередь семейства КамАЗ-4310. Первая промышленная партия была изготовлена в феврале 1981 г. как подарок XXVI съезду КПСС (5 автомобилей прибыли в Москву к открытию съезда). Серийное производство началось в 1983 г.
КамАЗ-4310 предназначен для перевозок грузов, людей и буксировки прицепов по всем видам дорог и бездорожью. На военных аэродромах может использоваться для буксировки различных летательных аппаратов.
КамАЗ-4310 выполнен по компоновочной схеме с кабиной над двигателем. Для увеличения проходимости применены неотключаемый полный привод, короткие передний и задний свесы, односкатная ошиновка, система регулирования давления в шинах (от 0,7 до 3,0 кгс/см?). Кабина трёхместная, цельнометаллическая, оборудована автономным отопителем. Может устанавливаться как обычная кабина, так и удлинённая со спальным местом. Сиденье водителя подрессоренное, регулируется по массе водителя, длине, наклону спинки. Для доступа к двигателю кабина откидывается вперёд гидравлическим подъёмником. Кузов цельнометаллический с задним открывающимся бортом, откидными скамейками, дугами и тентом.
Таблица 21
Основные технические характеристики
| 1 | Габариты длина/ширина/высота, мм | 7650/2500/2860 |
|---|---|---|
| 2 | База, мм | 3340/1320 |
| 3 | Колея, мм | 2010 |
| 4 | Дорожный просвет, мм | 365 |
| 5 | Радиус поворота, м | 11,3 |
| 6 | Масса в снаряженном состоянии с лебёдкой/полная, кг | 8715/15200 |
| 7 | Грузоподъёмность, кг | 5000 |
| 8 | Допустимая масса буксируемого прицепа, кг | 7000 |
| 9 | Двигатель | |
| тип | КамАЗ-740.10 | |
| число цилиндров | 8 | |
| рабочий объём, см? | 10850 | |
| степень сжатия | 17 | |
| мощность, л.с. | 210 | |
| 10 | Число передач | 5?2 |
| 11 | Колёсная формула | 6?6 |
| 12 | Размер шин | 1220?400–533″ |
| 13 | Запас топлива, л | 2?125 |
| 14 | Скорость максимальная, км/ч | 85 |
| 15 | Запас хода, км | 830 |
Силовая установка состоит из 8-цилиндрового V-образного четырёхтактного дизеля КамАЗ-740.10. Сцепление КамАЗ-14, двухдисковое сухое. Коробка передач КамАЗ-141, 5-ступенчатая с синхронизаторами на II, III, IV и V передачах. Раздаточная коробка двухступенчатая с межосевым блокируемым дифференциалом. Главная передача двойная: пара конических шестерён со спиральным зубом и пара цилиндрических косозубых шестерён. Передний мост оснащён шарнирами равных угловых скоростей дискового типа «Тракт». Средний мост проходной. Подвеска рессорная с гидравлическими телескопическими амортизаторами. Рабочий тормоз барабанный на все колёса с раздельным пневматическим приводом. Имеется вспомогательный тормоз — моторный замедлитель с пневматическим приводом. Рулевое управление снабжено гидроусилителем. В передней части имеется лебёдка для самовытаскивания с приводом от коробки отбора мощности. Трос лебёдки может выдаваться вперёд и назад.
Дальнейшим развитием КамАЗ-4310 стало семейство унифицированных автомобилей высокой проходимости «Мустанг» (КамАЗ-4350, КамАЗ-5350, КамАЗ-6550).
Автомобиль Урал-4320
С 1961 г. на Уральском автомобильном заводе велось производство полноприводного многоцелевого автомобиля Урал-375. В ходе производства конструкторы завода постоянно работали над совершенствованием конструкции. Постепенно автомобиль приобрёл высокую степень безотказности и долговечности. Единственным крупным недостатком был двигатель, работающий на высокооктановом бензине.
Попытки установить на автомобиле дизель начались ещё в 60-х гг. На заводе был разработан и успешно прошёл испытания дизельный двигатель Урал-640. Но запустить его в производство не удалось, т. к. у завода не оказалось достаточных средств для этого. В 1969 г. было принято решение о строительстве нового автозавода в Набережных Челнах и разработке семейства грузовых автомобилей для производства на нём. Новый завод (точнее комплекс заводов) должен был выпускать двигатели не только для себя, но и для других заводов, в том числе и для УралАЗа.

Рис. 114. Урал-4320
3 апреля 1969 г. вышел приказ Министерства автомобильной промышленности СССР, поручившего разработку двигателя и коробки передач Ярославскому моторному заводу.
Первые образцы нового дизеля были построены и испытаны на стенде в том же 1969 г. В конце года дизель ЯМЗ-7Э641 и коробка передач ЯМЗ-Э141 прибыли в Миасс и были установлена на автомобиле Урал-375Д. Испытания начались в январе 1970 г. и продолжались до июня. За это время пробег опытного автомобиля составил 19553 км. Испытания выявили целый ряд недостатков двигателя, и он был возвращён на доработку в Ярославль. В 1972 г. испытания возобновились. Доработанный двигатель получил обозначение ЯМЗ-740, а прототип автомобиля — Урал-Э4320.
Тем временем на УралАЗе был подготовлен и в апреле 1973 г. утверждён технический проект модернизации Урал-375Д. В марте того же года были построены 3 новых прототипа (из них 2 в варианте седельного тягача Урал-44201), и начались их заводские испытания. По результатам заводских испытаний были выработаны рекомендации для приёмочных испытаний.
17 апреля 1974 г. директор завода подписал приказ № 310, в котором определялся порядок работ по производству автомобилей Урал-4320 с дизелем ЯМЗ-740. Приказ определял очерёдность выпуска новых и модернизированных деталей. В первую очередь вводились изменения, внедрение которых было возможно и на карбюраторном Урал-375Д: усиленные редукторы и картеры мостов, модернизированная раздаточная коробка, вторая трубчатая поперечина рамы, новая поперечина крепления кабины, новые кронштейны подвески раздаточной кабины, колёса 254Г-508 с тороидальными полками, модернизированная кабина, новое оперение, более комфортные сиденья водителя и пассажиров.
Во втором квартале 1974 г. была изготовлена партия прототипов (2 бортовых и 2 тягача). Приёмочные испытания начались в апреле 1974 г. и завершились в феврале 1975 г. Конструкторская документация на подготовку производства была подготовлена в 1975 г. 9 сентября 1975 г., основываясь на успешном завершении испытаний, межведомственная комиссия рекомендовала Урал-4320 в серийное производство. Решение комиссии было утверждено приказом Министерства № 415 от 31 декабря 1975 г. В 1976 г. был пущен в строй КамАЗ. В следующем году с него начали поступать двигатели, и 7 декабря 1977 г. были собраны первые 5 серийных автомобилей. До конца года выпуск составил 25 автомобилей.
Автомобиль Урал-4320 предназначен для перевозок грузов, людей и буксировки прицепов по всем видам дорог и по бездорожью. Конструкция рамная. Для увеличения проходимости применены полный привод, короткие передний и задний свесы, односкатная ошиновка, система регулирования давления в шинах. Герметизация агрегатов позволяет преодолевать водные преграды глубиной до 1,5 м. Силовая установка состоит из 8-цилиндрового V-образного четырёхтактного дизеля КамАЗ-740.10. После пожара на заводе двигателей в 1993 г. на КамАЗы пришлось устанавливать ярославские двигатели ЯМЗ-236 и ЯМЗ-238. Сцепление КамАЗ-14, двухдисковое сухое. Коробка передач КамАЗ-141, 5-ступенчатая с синхронизаторами на II, III, IV и V передачах. Раздаточная коробка двухступенчатая с межосевым блокируемым дифференциалом. В передней части имеется лебёдка для самовытаскивания. Рулевое управление снабжено гидроусилителем. Кабина трёхместная, цельнометаллическая, снабжена отопителем. Для работы в условиях низких температур (до –50 °C) устанавливается второй отопитель и предпусковой подогреватель двигателя. Сиденье водителя регулируется по высоте.
Таблица 22
Основные технические характеристики
| 1 | Габариты, мм: | |
|---|---|---|
| длина/ширина | 7366/2500 | |
| высота по кабине/высота с тентом | 2680/2870 | |
| 2 | База, мм | 3525 + 1400 |
| 3 | Колея, мм | 2000 |
| 4 | Дорожный просвет, мм | 400 |
| 5 | Радиус поворота, м | 10,8 |
| 6 | Масса, кг: в снаряженном состоянии с лебёдкой/полная | 8440/13425 |
| 7 | Грузоподъёмность, кг | 5000 |
| 8 | Допустимая масса буксируемого прицепа, кг | 7000 |
| 9 | Двигатель: | |
| тип | КамАЗ-740 | |
| число цилиндров | 8 | |
| рабочий объём, см? | 10850 | |
| степень сжатия | 17 | |
| мощность, л.с. | 210 | |
| 10 | Число передач | 5?2 |
| 11 | Колёсная формула | 6?6 |
| 12 | Размер шин | 14,00–20″ |
| 13 | Запас топлива, л | 210 + 60 |
| 14 | Скорость максимальная, км/ч | 85 |
| 15 | Запас хода, км | 800 |
| 16 | Глубина преодалеваемого брода, м | 1,5 |
| 17 | Тормозной путь со скорости 40 км/ч, м | 15 |
| 18 | Контрольный расход топлива при скорости 40 км/ч, л/100 км | 27 |
Кузов цельнометаллический с задним открывающимся бортом, откидными скамейками, дугами и тентом. Первоначально устанавливался кузов по типу Урал-375Д (с надколёсными нишами). С 1986 г. устанавливается кузов с плоским полом. Подвеска рессорная с гидравлическими телескопическими амортизаторами. Рабочий тормоз барабанный на все колёса с раздельным пневмогидравлическим приводом.
Первоначально объём поставок двигателей с КамАЗа был невелик, и в 1978 г. собрали всего 100 автомобилей. Но затем выпуск неуклонно возрастал и к 1990 г. достиг 31500 шт./г. Росло и количество модификаций. Большинство выпущенных автомобилей поставлялось Министерству обороны, но их можно встретить и в гражданских организациях. Урал-4320 поставляется на экспорт. На шасси Урал-4320 и его модификаций разработано около 1000 специализированных автомобилей различного назначения.
1.6. Перспективы развития и модернизации ПЗРК
Одним из недостатков ПЗРК, значительно уменьшающих боевые возможности комплекса, является ограничение возможности обстрела воздушной цели в условиях, затрудняющих или исключающих её визуальное обнаружение и прицеливание (ночью, в сумерках, в тумане и др.). В последнее время при проведении боевых операций ночные налёты стали неотъемлемой частью тактических действий авиации, так что применение приборов ночного видения существенно расширило бы возможности комплекса. Возникла необходимость использования систем теплового обнаружения и наблюдения (тепловизоров).
Средства обеспечения стрельбы ночью (СОСН) 9С520 предназначены для управления боевой работой отделения стрелков-зенитчиков, вооружённых отечественными ПЗРК, в любое время суток и создания более комфортных условий стрелкам-зенитчикам при работе как в цикле поиска цели, подготовки и пуска ЗУР, так и в режиме боевого дежурства.
В состав СОСН 9С520 входят:
• приборы ночного видения (ПНВ) 1ПН72;
• переносной электронный планшет (ПЭП) 1Л110–1;
• индивидуальные средства целеуказания (ИСЦ) 9С520.01.
Целераспределение стрелкам-зенитчикам производит командир отделения на основе анализа воздушной обстановки, наблюдая её на экране индикатора ПЭП и выдавая адресное целеуказание посредством набора данных (№ стрелка-зенитчика, № цели) на клавишной панели ПЭП 1Л110–1.



Рис. 115. СОСН 9С520
Информация целеуказания (азимут, дальность до цели) посредством проводной линии передачи (связи) отображается у стрелка-зенитчика на индикаторе опорного устройства индивидуального средства целеуказания, который крепится на пусковой трубе и может находиться на удалении до 5 м от ПЭП 1Л110–1. Загорание на индикаторе светодиода справа указывает на необходимость разворота пусковой трубы в азимутальной плоскости вправо до момента загорания светодиода слева или до момента погасания светодиода. Погасание обоих светодиодов направления при отображении дальности на индикаторе свидетельствует, что пусковая труба ПЗРК направлена в азимутальной плоскости на цель с точностью ±1,4°.
В настоящее время развитие ПЗРК привело к тому, что их технические характеристики вплотную приблизились к зенитным ракетным комплексам малой дальности.
Одной из последних разработок «Коломенского опытного конструкторского бюро машиностроения» является ПЗРК 9К339 «Игла-С».
Новый комплекс отличается от предыдущих ПЗРК значительно увеличенной боевой частью как по массе взрывчатого вещества, так и по количеству осколков, а также наличием контактно-неконтактного взрывателя, алгоритм работы которого обеспечивает выбор оптимального с точки зрения эффективности момента подрыва БЧ как в контактном, так и в неконтактном режимах работы.
Кроме того, в комплексе реализованы абсолютно новые по сравнению с ПЗРК «Игла» принципы построения системы управления, что заметно улучшило точность наведения ракеты.
Таблица 23
Основные технические характеристики
| 1 | Зона отображения воздушной обстановки, км | 25,6?25,6 |
| 2 | Число одновременно отображаемых на ПЭП 1Л110-1 целей, проходящих относительно стрелка-зенитчика с параметром 4 км | 1-4 |
| 3 | Количество индивидуальных средств целеуказания | 3 |
| 4 | Вероятность обнаружения целей типа самолёт (вертолёт) днём до рубежа 6 км на встречном курсе | Не менее 0,9 |
| 5 | Вероятность обнаружения целей типа самолёт (вертолёт) ночью с помощью прибора ночного видения до рубежа 2 км | Не менее 0,6 |
| 6 | Время развертывания и свертывания СОСН совместно с ПЗРК, мин | Не более 5 |
| 7 | Время непрерывной работы СОСН от одного источника питания — аккумулятора 10НКГЦ-1,8–1, ч | 12 |
| 8 | Масса СОСН в упаковке, кг | 80 |
Все это позволило значительно повысить эффективность комплекса по сравнению с его аналогами («Игла», «Стингер») и достичь такого показателя, который соответствует более тяжёлым ПЗРК типа «Мистраль». Одновременно на 15 % возросла и дальность поражения цели, которая теперь составляет до 6 км.
И все же главное достоинство комплекса «Игла-C» в том, что впервые в таком калибре управляемой ракеты применен неконтактный датчик, обеспечивающий подрыв боевой части при её пролёте рядом с целью, что существенно повысило возможность поражения малоразмерных целей типа крылатых ракет и ДПЛА. Результаты превзошли все ожидания. Конечно, ракеты ПЗРК с контактным взрывателем также способны на прямое попадание в малоразмерные цели и их поражение, что неоднократно было отмечено при демонстрационных пусках по имитаторам воздушных целей и, как уже отмечалось, в боевых действиях. Но ракеты комплекса «Игла-С» поражают эти цели практически всегда, а их расход по сравнению с ПЗРК «Игла» существенно уменьшен.
Рис. 116. ПЗРК «Игла-С»
Таким образом, создание ПЗРК «Игла-C», представляющего собой достаточно массовое и сравнительно недорогое зенитное средство, стало ответом на вопрос, каким образом обеспечить эффективную оборону против крылатых ракет при необходимом боезапасе ракет.
В этот ПЗРК дополнительно введён съёмный прицел ночного видения, позволяющий применять ПЗРК в ночных условиях, обеспечивающий обнаружение и идентификацию целей стрелком-зенитчиком, прицеливание и сопровождение цели до пуска ракеты.
Вместе с тем сохранена высокая преемственность в эксплуатации «Иглы-С», «Иглы-1» и «Иглы». Размеры нового ПЗРК, посадочные места для его крепления и габариты упаковок остались прежними. Ракета комплекса «Игла-C» без труда может быть уложена в имеющиеся места укладки прежних ракет и установлена на ранее созданные под ракеты комплексов «Игла-1» и «Игла» пусковые устройства, например на опорно-пусковую установку «Джигит».
Пусковой механизм ПЗРК «Игла-C» обеспечивает пуск ракет ПЗРК «Игла-1» и «Игла», а пусковой механизм комплекса «Игла» практически без ограничений — комплекса «Игла-С». У комплексов — взаимозаменяемые НИПы. ПНВ имеет в составе крепежные элементы, позволяющие устанавливать его на комплексы «Игла-1» и «Игла». В состав комплекса вошли учебные средства, позволяющие проводить тренировки в стрельбе не только из комплекса «Игла-C», но и комплексов «Игла-1» и «Игла».
Государственные испытания нового комплекса, проведенные российскими военными специалистами, подтвердили его высокие эксплуатационные характеристики, свойственные также всем российским комплексам.

Рис. 117. Пусковой комплект «Джигит»
ПЗРК «Игла-C» надёжно функционирует в условиях предельных температур и высокой влажности, при резких перепадах температуры окружающей среды и при выпадении конденсированных осадков, после погружения в воду и подъёма в негерметичной кабине самолёта на высоту до 12 км, после длительной перевозки любым видом транспорта, в том числе на автомобилях и гусеничных машинах, по любым типам дорог и бездорожью. Комплексу не страшны ни дождь, ни пыль, ни песок, ни солнце. В упакованном виде допускается падение боевых средств с высоты до 2 м на бетонное основание, при этом они остаются годными к дальнейшему боевому применению. Ракета может быть запущена стрелком-зенитчиком с плеча с любой неподготовленной открытой площадки, из окопа, кузова движущейся автомашины, с железнодорожной платформы и даже из водоёма.
Сегодня коллектив разработчиков российских ПЗРК, имея в своём составе высококлассных специалистов, в багаже которых огромный опыт проведения работ и уникальный научно-технический задел, продолжает работы по усовершенствованию ПЗРК.
Основные характеристики ПЗРК «Игла-С» приведены на стр. 5 Альбома схем и рисунков к дисциплине.
Другим фактором, снижающим боевые возможности ПЗРК, является сложность ведения залпового огня двумя ракетами, что могло бы существенно увеличить вероятность поражения цели одним выстрелом (в среднем в 1,5 раза).
Эту задачу решает уникальный и не имеющий аналогов в мире пусковой комплект «Джигит». Он включает в себя опорно-пусковую установку (ОПУ) на две ракеты, оборудование для автомобиля, на котором размещается ОПУ с дополнительным боекомплектом из шести ракет, средства технического обслуживания и учебно-тренировочные средства.
Пусковой комплект может размещаться не только на подвижных носителях (бортовых автомобилях, катерах ВМФ и т. д.), но и непосредственно на грунте. Он разбирается на три носимые составляющие.
Опорно-пусковая установка может быть оснащена:
• оборудованием, обеспечивающим получение предварительного целеуказания от вышестоящего звена управления;
• оптическим прицелом с дневным и ночным каналами;
• радиозапросчиком;
• оборудованием, позволяющим установить ОПУ в кузове автомобиля.
В последнее время в мире просматривается тенденция использования ракет ПЗРК для оснащения различных носителей наземного, морского и воздушного базирования. Этому способствует желание разработчиков носителей иметь в своем составе более дешёвые ракеты без ущерба эффективности, при этом предпочтение отдается ракетам, реализующим принцип «выстрелил — забыл» и не имеющим демаскирующих признаков при прицеливании. В этом случае ПЗРК в комплекте носителя выглядят предпочтительнее: с одной стороны, его малый вес и габариты, позволяющие существенно увеличить боезапас и огневую мощь носителя, а с другой — то, что по своим тактико-техническим характеристикам ПЗРК, как отмечено выше, приблизился к уровню комплексов малой дальности и способен решать более широкие задачи, и позволяет создавать универсальные модули, используемые для построения различных уровней системы ПВО.
Таблица 24
Основные технические характеристики
| 1 | Количество ракет на ОПУ | 2 |
| 2 | Виды пуска | Залповый, одиночный |
| 3 | Режимы пуска | Автоматический, ручной |
| 4 | Сектор стрельбы по азимуту/углу места | 360°/от –15°до +60° |
| 5 | Масса ОПУ без ракет, кг | 128 |
| 6 | Время развертывания на боевой позиции, мин | 3 |
| 7 | Время перезаряжания ракет, мин | 2 |
| 8 | Расчёт, человек | 1 |
Для ракет типа «Игла» («Игла-1», «Игла-С») разработан комплект аппаратуры управления и пусковых модулей «Стрелец», обеспечивающий автоматизированный дистанционный одиночный или залповый пуск ракет ПЗРК с различных носителей наземного, воздушного и морского базирования.
Комплект «Стрелец» может быть использован для создания подвижных ЗРК малой дальности, которые за счёт большей мобильности, высокой скрытности и дешевизны могут прийти на замену более крупным ЗРК, имеющим близкие тактико-технические характеристики.
Кроме того, использование комплекта «Стрелец» позволяет:
• дооснастить ракетами ПЗРК другие ЗРК средней дальности с целью расширения (приближения) зоны пуска до 1 км и экономии более дорогих ракет;
• дооснастить ракетами ПЗРК зенитные артиллерийские системы с целью увеличения их боевой эффективности в дальней зоне и расширения зоны поражения;
• оснастить ракетами ПЗРК в качестве ракет класса «воздух — воздух» боевые и транспортно-боевые вертолёты и лёгкие малоскоростные самолёты;
• оснастить ракетами ПЗРК поворотные установки антенных и оптикоэлектронных постов кораблей, что увеличит огневую мощь корабельного контура ПВО, и создать на основе комплекта корабельные ЗРК малой дальности для малых кораблей и катеров.

Рис. 118. Комплект «Стрелец»
Таблица 25
Основные технические характеристики
| 1 | Количество пусковых модулей/ракет на носителе | До 4/8 |
| 2 | Время реакции, с | 6,5 |
| 3 | Максимальное время, отведенное на прицеливание, с | До 60 |
| 4 | Количество включений ракет на одном пусковом модуле | До 4 |
| 5 | Режимы стрельбы | Одиночный; залповый 2-мя ракетами с разных бортов |
| 6 | Время снаряжения (расснаряжения) модуля одним человеком, мин | Не более 4 |
| 7 | Масса снаряжаемого пускового модуля, кг | 72 |
| 8 | Масса аппаратуры управления, кг | Не более 24 |
Усовершенствование и модернизация ПЗРК значительно расширили область задач, решаемых комплексами, что потребовало создания для них различных средств обеспечения, позволяющих более полно реализовать их технические возможности.
Автоматизированная система управления огнём переносных зенитных ракетных комплексов «Шлем» предназначена для автоматизированного и автоматического целераспределения, целеуказания и управления огнём стрелков-зенитчиков, оснащённых зенитными ракетами «Игла-1», «Игла», «Игла-С».
Использование АСУ ПЗРК «Шлем» позволяет навести пусковую трубу с ракетой на цель и подготовиться к пуску до появления цели в зоне видимости стрелка-зенитчика; также возможен пуск ракеты после срабатывания головки самонаведения без визуального контакта с целью. Указанные возможности значительно улучшают характеристики боевого применения ПЗРК, особенно в условиях плохой видимости.
В процессе работы АСУ ПЗРК «Шлем» обеспечивает выполнение функций топопривязки, приёма данных о воздушных целях от РЛС или батарейного командного пункта, отображения воздушной обстановки на экране компьютера командира подразделения, селекцию целей, целераспределение, целеуказание, документирование и тренаж.
На оптоэлектронный прицел, устанавливаемый непосредственно на опорно-пусковой установке, в поле зрения стрелка-зенитчика поступает информация о пространственном местоположении закрепленной цели и в цифровом виде расчётное время подлёта, и расстояние до цели, а также команды управления.

Рис. 119. Система «Шлем»
Состав АСУ ПЗРК «Шлем»:
• автоматизированное рабочее место командира подразделения в составе носимого компьютера специального назначения, GPS-приемника, УКВ-радиостанции, радиомодема, размещённых в трансформируемой в рабочее место упаковке;
• от одного до девяти боевых рабочих мест стрелков-зенитчиков, включающих место для опорно-пусковой установки с возможностью крепления на ней двух зенитных ракет «Игла-1», «Игла», оптоэлектронный прицел, блок обработки информации, радиомодем.
Также совершенствуются и модернизируются штатные средства целеуказания и связи.
Таблица 26
Основные технические характеристики
| 1 | Количество обрабатываемых целей | До 60 |
|---|---|---|
| 2 | Дальность приёма РЛИ от РЛС или батарейного командного пункта, км | До 30 |
| 3 | Дальность передачи целеуказаний от командира подразделения ПЗРК до стрелка-зенитчика, м | До 1000 |
| 4 | Количество каналов управления | До 9 |
| 5 | Цикл управления, с | 1 |
| 6 | Количество ракет на пусковой установке | 2 |
| 7 | Точность топопривязки, м | До 20 |
| 8 | Вид стрельбы | Последовательный, одиночный, навстречу, вдогон |
| 9 | Углы наведения, град.: | |
| по азимуту | 360 | |
| по углу места | От –10 до +70 | |
| 10 | Диапазон рабочих температур, °С | От –40 до +55 |
| 11 | Масса, кг: | |
| автоматизированного рабочего места | 8,7 | |
| опорно-пусковой установки на грунте | 85 |
Переносной электронный планшет (ПЭП) 1Л110-1 предназначен для приёма, обработки, отображения воздушной обстановки в зоне боевого применения отделения ПЗРК и управления боевой работой стрелков-зенитчиков в ночных и дневных условиях путём выдачи данных целеуказания (азимут и дальность до цели) на индивидуальные средства целеуказания комплекса.
В состав ПЭП входят:
1) электронный контейнер ТЛМ-1;
2) радиостанция «Арбалет-IV».
Информация о воздушной обстановке на ПЭП поступает по радиоканалу с пунктов управления (РЛС) в форме кодограммы. ПЭП 1Л110–1 обеспечивает возможность получения информации целеуказания в кодограммах, целераспределение и автоматизированное управление боевой работой отделения стрелков-зенитчиков.
Кроме этого, ПЭП 1Л110-1 обеспечивает:
• совместимость с пунктами управления и РЛС по радиоканалу АПД;
• отображение на матричном индикаторе обстановки текущих координат и целей с признаками госпринадлежности «свой-чужой», состава цели (одиночная/групповая) и служебного номера цели, присвоенного ПЭП в зоне 25,6?25,6 км с дискретностью 1,6 км;
• предварительный отбор целей для обстрела отделением ПЗРК при пролёте с курсовым параметром менее 4 км и высоте менее 3 км;
• ввод значений топопривязки (X и Y относительно реперной точки) до ± 100 км с дискретностью 0,1 км;
• введение поправки направления (разницы между вертикальной линией сетки карты и магнитным меридианом) для данной местности с дискретностью 0,1° в диапазоне углов ±88,5°;
• автономный контроль функционирования с отображением на матричном индикаторе имитируемой воздушной обстановки в составе 4-х целей;
• наличие световой и звуковой сигнализаций в случаях потери связи, разряда аккумуляторной батареи, проведения автономного режима контроля, при вводе координат топопривязки и прохождения целью зоны отображения;
• изменение яркости свечения матричного индикатора обстановки и индикатора номера цели в зависимости от условий внешней освещенности (ночьдень).
Рис. 120. ПЭП 1Л110-1
Глава I
НАЗНАЧЕНИЕ И УСТРОЙСТВО КОМПЛЕКСА
Общие сведения о комплексе
1. Переносный зенитный ракетный комплекс «Стрела-2» является мощным огневым средством непосредственного прикрытия мотострелковых, танковых, парашютнодесантных подразделений от ударов воздушного противника в основном с малых высот. Комплекс позволяет эффективно уничтожать визуально наблюдаемые воздушные цели, излучающие тепловую энергию, как правило, на догонных курсах, а малоскоростные и неподвижные воздушные цели (зависшие вертолеты) — и на встречных курсах.
Комплекс прост в боевом применении и обслуживании, обладает высокой мобильностью и возможностью применения во всех видах боя и боевой деятельности войск.
В бою комплекс обслуживается и переносится одним человеком. Стрелок-зенитчик, вооруженный комплексом, способен быстро маневрировать и вести огонь с любого места, обеспечивающего возможность обнаружения цели и безопасность стрельбы: с открытой местности, из окопа, бронетранспортера, боевой машины пехоты, танка, с железнодорожной платформы и плавающих средств. Комплекс можно сбрасывать на парашюте в парковой укупорке.
2. Вес комплекса в боевом положении 14,5 кг, в походном — 15,8 кг. Вес ракеты 9,15 кг. Калибр ракеты 72 мм. Длина трубы комплекса 1490 мм. Время подготовки комплекса в состыкованном виде к стрельбе не более 10 сек. Комплекс может работать при температуре от +50 до –38 °C.
3. В состав комплекса (рис. 1) входят ракета 9М32 в трубе с источником питания и пусковой механизм 9П53.
4. Действие комплекса основано на принципе пассивного самонаведения зенитной управляемой ракеты по тепловому (инфракрасному) излучению цели. Пуск ракеты производится из трубы с помощью подстыкованного к ней пускового механизма.
Ракета
5. Ракета представляет собой управляемый снаряд с реактивным двигателем, работающим на твердом топливе, аппаратурой управления и боевой частью со взрывательным устройством ударного действия.
Полет ракеты происходит под действием силы тяги двигательной установки, которая возникает вследствие истечения через сопло пороховых газов, образующихся при горении топлива. Средняя скорость полета ракеты 430 м/сек. Активный участок полета ракеты (до полного сгорания топлива) составляет 2650 м; в дальнейшем ракета летит по инерции. Ракета в полете вращается вокруг продольной оси, ее стабилизация относительно двух других осей обеспечивается крыльями, расположенными в хвостовой части.
Рис. 1. Общий вид переносного зенитного ракетного комплекса «Стрела-2»:
1 — труба с ракетой и источником питания; 2 — пусковой механизм
Рис. 2. Конструкция ракеты 9М32:
1 — головной отсек; 2 — рулевой отсек; 3 — боевой отсек; 4 — двигательный отсек; 5 — рули; 6 — крылья
Аппаратура управления осуществляет управление полетом ракеты с помощью рулей по сигналам (командам), поступающим с тепловой следящей головки самонаведения.
6. Ракета (рис. 2) состоит из четырех отсеков: головного, рулевого, боевого и двигательного.
7. В головном (первом) отсеке размещается тепловая следящая головка самонаведения (рис. 3), которая предназначена для захвата цели, слежения за ней и формирования управляющего сигнала для наведения ракеты. Она состоит из следящего координатора цели и автопилота.
Следящий координатор цели является чувствительным элементом аппаратуры управления, воспринимающим тепловое излучение цели. Он предназначен для непрерывного автоматического определения угла рассогласования между осью координатора и линией ракета — цель. Координатор состоит из собственно координатора и гироскопической системы автоматического слежения за целью.
До нажатия на спусковой крючок ось координатора совмещена с продольной осью ракеты. Координатор удерживается в этом положении с помощью электрического стопора (координатор заарретирован). При нажатии на спусковой крючок до первого упора производится выключение электрического стопора и расстопоривание координатора (координатор разарретирован). При этом он получает возможность менять свое положение относительно продольной оси ракеты.
Автопилот предназначен для преобразования управляющего сигнала, поступающего с выхода следящего координатора, и формирования сигнала управления рулями ракеты.
8. Рулевой (второй) отсек предназначен для размещения элементов аппаратуры управления полетом ракеты и бортового источника питания. В нем размещены: рулевая машинка, бортовой источник питания, пороховой аккумулятор давления, датчик угловых скоростей.
Рулевая машинка является исполнительным органом аппаратуры управления ракетой и предназначена для поворота рулей под воздействием управляющих сигналов. Рулевая машинка работает от газов, поступающих их порохового аккумулятора давления.
Бортовой источник питания служит для электропитания аппаратуры ракеты в полете. Он состоит из турбогенератора и стабилизатора выходных напряжений. Ротор турбогенератора вращается под воздействием пороховых газов, поступающих из порохового аккумулятора давления.
Пороховой аккумулятор давления служит для питания турбогенератора и рулевой машинки пороховыми газами, которые образуются при горении пороховой шашки в специальной камере.
Рис. 3. Тепловая следящая головка самонаведения:
1 — общий вид; 2 — следящий координатор цели; 3 — автопилот
Датчик угловых скоростей служит для выработки электрического сигнала, пропорционального величине угловой скорости колебаний ракеты.
9. В боевом (третьем) отсеке размещаются боевая часть и взрывательное устройство (рис. 4).
Рис. 4. Боевая часть и взрывательное устройство:
1 — боевая часть; 2 — взрывательное устройство
Боевая часть осколочно-фугасно-кумулятивного действия предназначена для поражения воздушных целей и состоит из металлического корпуса, разрывного заряда весом 0,37 кг и тетрилового детонатора.
Взрывательное устройство ударного действия, электромеханического типа предназначено для подрыва боевой части при встрече ракеты с целью и для самоликвидации ракеты при промахе. Взрывательное устройство имеет две ступени предохранения, которые обеспечивают безопасность в обращении с ракетой.
Первая ступень предохранения обеспечивается инерционным стопором, который выключается под действием сил инерции при пуске ракеты, вторая ступень — пиротехническим предохранителем, который выгорает на начальном участке полета.
10. В двигательном (четвертом) отсеке размещена двигательная установка, предназначенная для создания силы тяги, которая обеспечивает старт ракеты, ее вращательное движение и необходимую скорость полета на траектории. Двигательная установка состоит из выбрасывающего и однокамерного двухрежимного двигателей (см. рис. 2), работающих на твердом топливе.
Выбрасывающий двигатель предназначен для выброса ракеты из трубы со скоростью 30 м/сек и придания ей скорости вращения 20 об/сек. Он состоит из стакана, выбрасывающего заряда, воспламенителей и соплового блока. Для обеспечения безопасности стреляющего двигатель заканчивает работу до вылета ракеты из трубы.
Однокамерный двухрежимный двигатель предназначен для разгона ракеты до средней скорости 430 м/сек на первом режиме работы двигателя (стартовая ступень) и поддержания этой скорости на втором режиме работы двигателя (маршевая ступень). Он состоит из камеры, гильзы, двухшашечного порохового заряда и воспламенителя.
На заднем торце хвостовой части четвертого отсека шарнирно закреплены четыре крыла под углом 55′ к продольной оси ракеты, что обеспечивает ее вращение в полете. Крылья образуют стабилизатор ракеты. Они участвуют и в создании подъемной силы.
При размещении ракеты в трубе рули и крылья находятся в сложенном положении и удерживаются от раскрытия стенками трубы.
11. Состыкованные отсеки ракеты, крылья и рули составляют планер ракеты, который служит для создания аэродинамических управляющих сил, изменяющих направление полета ракеты в соответствии с командами бортовой аппаратуры управления.
Рис. 5. Силы, действующие на ракету в полете
При полете ракеты с работающим двигателем на нее действуют сила тяги двигателя (реактивная сила) T, подъемная сила Y, сила лобового сопротивления X и сила тяжести G, а также стабилизирующий момент М ст (рис. 5).
Сила тяги приложена к центру тяжести ракеты и направлена вдоль ее продольной оси.
Подъемная сила перпендикулярна вектору скорости V, который направлен по касательной к траектории полета ракеты.
При отклонении рулей по командам бортовой аппаратуры управления появляется угол атаки, в результате чего возникает подъемная сила, изменяющая направление полета ракеты. Углом атаки a называется угол между вектором скорости и продольной осью ракеты.
Сила лобового сопротивления направлена в сторону, противоположную направлению вектора скорости. Она не оказывает влияния на направление полета ракеты.
Подъемная сила и сила лобового сопротивления являются составляющими полной аэродинамической силы, которая возникает в полете в результате взаимодействия планера с воздухом.
Сила тяжести перпендикулярна линии горизонта и приложена к центру тяжести ракеты.
Стабилизирующий момент возникает в результате действия полной аэродинамической силы. Под его воздействием ракета поворачивается в сторону уменьшения угла атаки.
Труба и источник питания
12. Труба (рис. 6) предназначена для прицеливания, пуска ракеты и предохранения стрелка-зенитчика от воздействия пороховых газов при пуске. Одновременно труба служит укупоркой ракеты при ее переносе, транспортировке и хранении. Она состоит из собственно трубы, блока вращения, механического прицела, механизма бортразъема, разъема и фиксатора.
Рис. 6. Труба:
1 — собственно труба; 2 — передняя крышка; 3 — задняя крышка; 4 — блок вращения; 5 — мушка; 6 — целик; 7 — патрон с сигнальной лампочкой; 8 — стойки; 9 — механизм бортразъема; 10 — корпус; 11 — отверстия с прорезями; 12 — разъем с крышкой; 13 — источник питания; 14 — стопор; 15 — фиксатор; 16 — ремень
13. Собственно труба служит для направления полета ракеты и отвода пороховых газов при пуске. Канал трубы гладкий, открытый с обоих концов. Внутри трубы со стороны переднего среза вклеено резиновое кольцо, которое плотно обжимает головку самонаведения, предохраняя внутреннюю полость трубы от попадания влаги при снятой передней крышке. В походном положении передний и задний срезы трубы закрываются крышками.
14. Блок вращения предназначен для разгона ротора гироскопа следящего координатора цели. Он состоит из катушек, магнитное поле которых, взаимодействуя с постоянным магнитом ротора, создает вращающий момент.
15. Механический прицел предназначен для наведения трубы с ракетой на цель. Он состоит из мушки и целика, закрепленных на откидывающихся стойках. Кольцевая мушка закреплена на передней стойке. На задней стойке закреплены целик и патрон с сигнальной лампочкой, загорающейся при захвате цели головкой самонаведения. Сигнальная лампочка снабжена диафрагмой, предохраняющей глаз стрелка от засветки при стрельбе в сумерках.
16. Механизм бортразъема предназначен для соединения электрических цепей трубы и ракеты, а также для механического стопорения ракеты в трубе. Он состоит из корпуса, в котором расположены бортразъем, стопор, толкатель с резиновым колпачком и вставка.
Бортразъем служит для соединения электрических цепей трубы и ракеты. Ножевые контакты вилки бортразъема входят в соответствующие гнезда розетки на ракете.
Стопор служит для фиксации ракеты в трубе. Он входит в гнездо рулевого отсека ракеты, удерживая ракету от перемещений.
Толкатель с резиновым колпачком служит для расстопоривания ракеты при нажатии на спусковой крючок пускового механизма при пуске.
Вставка служит для подсоединения источника питания.
С помощью проушин корпуса и фиксатора, закрепленного на обойме, к трубе присоединяется пусковой механизм.
17. Разъем предназначен для соединения электрических цепей пускового механизма и трубы. Контакты вилки разъема пускового механизма входят в соответствующие гнезда разъема трубы.
18. Источник питания одноразового действия обеспечивает питание постоянным током электронного блока пускового механизма, головки самонаведения (до выхода на режим бортового источника питания ракеты), цепи взведения взрывательного устройства, электровоспламенителей порохового аккумулятора давления и выбрасывающего двигателя. Он представляет собой батарею последовательно соединенных электрохимических элементов. Между электрохимическими элементами располагаются пиротехнические нагреватели, которые загораются при включении источника питания. Под воздействием тепла, выделившегося при сгорании пиротехнических нагревателей, расплавляется твердый электролит. Источник питания выходит на режим за время не более 1,3 сек. Время его работы составляет не менее 40 сек. Источник питания крепится к трубе с помощью чеки и стопора.
Пусковой механизм
19. Пусковой механизм (рис. 7) предназначен для подготовки ракеты к пуску и производства пуска.
Основанием пускового механизма служит корпус, в котором собраны все части и узлы пускового механизма. Корпус имеет проушину, в которой установлены ось, служащая для подсоединения пускового механизма к трубе, спусковой крючок и стопор спускового крючка. Для фиксации пускового механизма после подсоединения его к трубе служит стопор пускового механизма. В верхнем окне корпуса закреплена вилка разъема с контактами, которыми она подсоединяется к разъему трубы. На крышке пускового механизма закреплен телефон, подающий звуковой сигнал о захвате цели головкой самонаведения.
20. В рукоятке пускового механизма размещена контактная группа, которая выполняет следующие функции:
— при ненажатом спусковом крючке исключает возможность подачи напряжения на электровоспламенители выбрасывающего двигателя и порохового аккумулятора давления;
Рис. 7. Пусковой механизм:
1 — корпус; 2 — проушины; 3 — ось; 4 — спусковой крючок; 5 — стопор спускового крючка; 6 — стопор пускового механизма; 7 — рукоятка; 8 — крышка; 9 — телефон; 10 — электронный блок
— при нажатии спускового крючка до первого положения выключает электрический стопор следящего координатора цели тепловой следящей головки самонаведения;
— при полном нажатии спускового крючка подключает электровоспламенители порохового аккумулятора давления и выбрасывающего двигателя к источнику питания.
21. Внутри корпуса пускового механизма размещен электронный блок, который предназначен:
— для преобразования напряжения источника питания и подачи его на электрические цепи трубы и ракеты;
— для разгона ротора гироскопа следящего координатора цели;
— для формирования и выдачи звукового и светового сигналов о захвате цели тепловой следящей головкой самонаведения;
— для отключения источника питания от тепловой следящей головки самонаведения перед стартом ракеты при включении бортового источника питания;
— для последовательной подачи напряжения на электровоспламенители порохового аккумулятора давления и выбрасывающего двигателя.
Электронный блок состоит из блоков разгона, задержки и информации.
Блок разгона предназначен для преобразования напряжения, подаваемого от источника питания, и отключения напряжения питания от блока вращения.
Блок задержки отключает источник питания от ракеты после включения бортового источника питания, а также обеспечивает задержку старта ракеты на время переходных процессов в схеме ракеты, вызванных переходом на питание от бортового источника питания.
Блок информации предназначен для выработки звукового и светового сигналов о наличии цели в поле зрения головки самонаведения и о ее захвате. Эти сигналы воспринимает стреляющий.
Действие комплекса
22. При подготовке к пуску ракеты, стрелок-зенитчик включает источник питания, напряжение с которого поступает на электронный блок пускового механизма, а через него на тепловую следящую головку самонаведения и блок вращения, вследствие чего приводится во вращение (разгоняется) ротор гироскопа следящего координатора цели.
При поимке цели и появлении ее в поле зрения тепловой следящей головки самонаведения поток теплового излучения цели попадает в координатор. Если мощность потока больше минимальной чувствительности координатора, то стреляющий слышит звуковой сигнал, а на стойке прицела загорается сигнальная лампочка. При наличии этих сигналов стрелок-зенитчик нажимает на спусковой крючок до первого упора, производя тем самым расстопоривание (разарретирование) координатора. Ось координатора, получив возможность изменять свое положение относительно продольной оси ракеты, автоматически направляется на цель — тепловая следящая головка самонаведения захватила цель.
Для пуска ракеты стрелок-зенитчик нажимает на спусковой крючок до отказа. При этом стопор выходит из зацепления с ракетой, освобождая ее. Напряжение от источника питания подается на электровоспламенитель порохового аккумулятора давления, пороховые газы от которого поступают в турбогенератор. Бортовой источник питания выходит на рабочий режим, после чего происходит переключение электропитания аппаратуры ракеты на бортовой источник питания. Затем срабатывает выбрасывающий двигатель, который выбрасывает ракету из трубы и сообщает ей вращательное движение вокруг продольной оси. Под действием сил инерции снимается первая ступень предохранения взрывательного устройства.
При выходе ракеты из трубы раскрываются рули и крылья. На взрывательное устройство подается напряжение с бортового источника питания.
В течение 0,3 сек после вылета из трубы ракета летит по инерции с неработающим двигателем. На расстоянии не менее 6,5 м, обеспечивающем безопасность стреляющего, начинает работать двухрежимный двигатель. На расстоянии 140―250 м от стреляющего после сгорания пиротехнического предохранителя снимается вторая ступень предохранения и происходит взведение взрывательного устройства.
В конце работы стартовой ступени двухрежимного двигателя, когда ракета разовьет необходимую скорость, начинается эффективное самонаведение ракеты.
В полете ось следящего координатора остается направленной на цель независимо от положения продольной оси ракеты (тепловая следящая головка самонаведения следит за целью). При этом угол между осью следящего координатора и продольной осью ракеты (угол пеленга) может изменяться в пределах 0―40° (рис. 8).
Рис. 8. Взаимное положение оси следящего координатора цели и продольной оси ракеты
Координатор выдает сигнал, пропорциональный изменению угловой скорости линии ракета — цель, который обеспечивает наведение ракеты на цель. Одновременно датчик угловых скоростей вырабатывает сигналы, пропорциональные угловой скорости колебаний ракеты относительно ее центра тяжести, которые служат для уменьшения колебаний ракеты. Эти электрические сигналы поступают в автопилот, где происходит их преобразование в управляющие сигналы.
Рулевая машинка по сигналам, поступающим с автопилота, поворачивает рули, направляя ракету в точку встречи с целью. При попадании ракеты в цель взрывательное устройство подрывает боевую часть.
В случае промаха через 11―14 сек с момента пуска происходит самоликвидация ракеты путем подрыва боевой части.
Запасные части, инструмент и принадлежность. Маркировка элементов комплекса
23. Комплекс снабжен одиночным комплектом ЗИП 1, в состав которого входят запасные части (источник питания 9Б17), инструмент (ключ 51.010, предназначенный для неполной разборки пускового механизма) и принадлежность (фланель «Арктика» арт. № 506 ГОСТ 7259―54, служащая для протирания обтекателя головки самонаведения, защитные очки, предназначенные для защиты глаз стреляющего при пуске ракеты, и чехол 56.000, используемый при переноске пускового механизма и ЗИП во время похода).
Одиночный комплект ЗИП, за исключением источника питания, поступает в парковой укупорке пускового механизма. Источник питания укладывается в парковую укупорку труб с ракетами.
К каждым 30 пусковым механизмам придается групповой комплект ЗИП 2 для пускового механизма 9П53, а к каждым 100 ракетам — групповой комплект ЗИП 2 для ракеты 9М32.
24. Маркировка наносится черной эмалевой краской на трубу, пусковой механизм, источник питания, парковую укупорку труб с ракетами (в одной укупорке хранятся две трубы с ракетами) и парковую укупорку пускового механизма.
Пример маркировки:
Маркировка парковой укупорки труб с ракетами
На торцовой стенке укупорки
102 103
5 — 67–14 ОФК
9П54
15–67 — 9
127 128
2 шт.
Значение входящих в эту маркировку цифр и букв следующее:
102, 103 — учетные номера ракет;
5 — номер партии сборки;
67 — год сборки;
14 — номер снаряжательного завода;
ОФК — обозначение действия боевой части (осколочно-фугасно-кумулятивная);
9П54 — индекс трубы;
15 — номер партии изготовления трубы;
67 — год изготовления трубы;
9 — номер завода — изготовителя трубы;
127, 128 — учетные номера труб;
2 шт. — количество труб в укупорке.
На боковой стенке укупорки
9М32 ОФК
4 — 66–16
102 103
ОК. СНАР.
5 — 67–14
2 шт. БРУТТО 53 кг
Значение входящих в эту маркировку цифр и букв следующее:
9М32 — индекс ракеты;
ОФК — обозначение действия боевой части;
4 — 66–16 — номер партии изготовления, год изготовления и номер завода — изготовителя ракет;
102, 103 — учетные номера ракет;
ОК. СНАР. — окончательно снаряженный вид;
5 — 67–14 — номер партии сборки, год сборки и номер снаряжательного завода;
2 шт. — количество ракет в укупорке;
БРУТТО 53 кг — вес 53 кг.
Маркировка парковой укупорки пускового механизма
На верхней крышке укупорки
9П53
21–66 — 7
112
Значение входящих в эту маркировку цифр и букв следующее:
9П53 — индекс пускового механизма;
21–66 — 7 — номер партии изготовления, год изготовления и номер завода-изготовителя;
112 — учетный номер пускового механизма.
Маркировка трубы
9П54
15–67 — 9
127
9М32
102
ОФК
Значение входящих в эту маркировку цифр и букв следующее:
9П54 — индекс трубы;
15–67 — 9 — номер партии изготовления, год изготовления и номер завода — изготовителя трубы;
127 — учетный номер трубы;
9М32 — индекс ракеты;
102 — учетный номер ракеты;
ОФК — обозначение действия боевой части.
Маркировка пускового механизма
9П53
21–66 — 7
112
Значение входящих в эту маркировку цифр и букв следующее:
9П53 — индекс пускового механизма;
21–66 — 7 — номер партии изготовления, год изготовления и номер завода-изготовителя;
112 — учетный номер пускового механизма.
Маркировка источника питания
9Б17
0 7 11 16 131
Значение входящих в эту маркировку цифр и букв следующее:
9Б17 — индекс источника питания;
0 — условный знак завода-изготовителя;
7 — последняя цифра года изготовления;
11 — месяц изготовления;
16 — номер партии;
131 — порядковый номер изделия в партии.
О книге «ПЗРК «Стрела-2»»
В Наставлении излагаются назначение, устройство и действие переносного зенитного ракетного комплекса «Стрела-2», содержание и порядок проведения регламентных работ и технического обслуживания, приемы и правила стрельбы по воздушным целям, а также вопросы боевого применения комплекса.Содержащиеся в Наставлении указания необходимо применять творчески, сообразуясь с обстановкой, конкретной модификацией комплекса и принятой организационно-штатной структурой.При эксплуатации переносного зенитного ракетного комплекса необходимо выполнять требования Инструкции по эксплуатации.
Произведение относится к жанру Справочники. На нашем сайте можно скачать бесплатно книгу «ПЗРК «Стрела-2»» в формате fb2, epub или читать онлайн. Здесь так же можно перед прочтением обратиться к отзывам читателей, уже знакомых с книгой, и узнать их мнение. В интернет-магазине нашего партнера вы можете купить и прочитать книгу в бумажном варианте.