

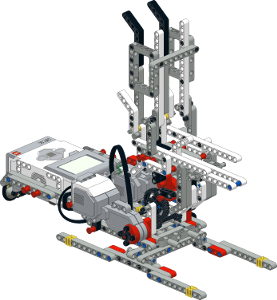
Название проекта: Робот-манипулятор Arm H25 из LEGO Mindstorms
Платформа: LEGO Mindstorms
Робот-манипулятор Arm H25 — стандартная модель для базового образовательного набора LEGO Mindstorms EV3 Education. Инструкцию для сборки робота-манипулятора Arm H25 можно использовать и с домашней версией LEGO Mindstorms EV3 — в этом случае чтобы построить робота потребуется найти несколько дополнительных деталей.
Инструкция по сборке.
Использованные компоненты: базовый набор LEGO Mindstorms Education EV3, артикул 45544

Сайт проекта: http://robotsquare.com/2013/10/01/education-ev3-45544-instruction/
Другие проекты на этой платформе:
- Двуногий робот из Arduino, LEGO и деталей 3D печати
- LEGO EV3 робот-художник
- SpinnerBot из LEGO Mindstorms
- LegoGun — двуствольный пистолет из Lego Mindstorms EV3
- Спирограф — рисующий робот из LEGO Mindstorms EV3
- Бесполезная коробка из Lego Mindstoms EV3
- Гексапод из Lego Mindstorms EV3
- Роботизированная рука из Lego Mindstorms EV3
- Подъемные механизмы из LEGO Mindstorms
- Прибор автоматической подачи одноразовых стаканчиков из LEGO Mindstorms
- Робот-кабан-динозавр DINOR3X из LEGO Mindstorms EV3
- Znap — робот из LEGO Mindstorms EV3
- Робот-сортировщик (Color Sorter) из LEGO Mindstorms EV3
- Робот Educator Vehicle из LEGO Mindstorms EV3
- Робот-сигвей (Gyro Boy) из Lego Mindstorms
- Робот-гексапод NXTAPOD из LEGO Mindstorms. Модель Даниэля Бенедеттелли
- Робот-щенок (Puppy) из LEGO Mindstorms EV3
- Лимоноид — робот, продающий напитки
- Киноаппарат из Lego Mindstorms
- Принтер из Lego Mindstorms «STALKER ver. 2.0»
- Робот-пожарный из LEGO Mindstorms
- Крестики-нолики — ARBUZIKI-TEAM
- EZ Wilber — говорящий балансирующий робот из Lego Mindstorms
- Ev3 Print3rbot — робот-художник из Lego Mindstorms
- 3D-принтер из Lego печатает шоколадом
- Lego Mindstorms NXT 2.0 играет в шахматы
- Робот-гексапод из Lego Mindstorms NXT 2.0
- Робоноги из Lego Mindstorms
- Lego Mindstorms-экскаватор, управляемый Microsoft Kinect
- Lego-робот DIZZ3
- Крестики-нолики для Lego-робота
- Lego Mindstorms EV3 3D-принтер 2.0
Перейти в каталог DIY-проектов роботов
Как добавить робопроект в каталог?

Теги: Lego Education, Lego Mindstorms, робот-манипулятор
Dep-courses
- РЕГИСТРАЦИЯ
- ВОЙТИ
- НОВОСТИ
- ЭКСПЕРТЫ
- НАПРАВЛЕНИЯ
- СОРЕВНОВАНИЯ
- РЕЕСТР
- ГЛАВНАЯ
- — РЕГИСТРАЦИЯ
- — ВОЙТИ
- — НОВОСТИ
- — 3D-МОДЕЛИРОВАНИЕ
- — ГРАФИЧЕСКИЙ ДИЗАЙН
- — ПРОГРАММИРОВАНИЕ
- — ЭЛЕКТРОНИКА
- — РОБОТОТЕХНИКА
- СОРЕВНОВАНИЯ
- РЕЕСТР
E-mail
Dep-courses@ya.ru
LEGO MINDSTORMS EV3 семь инструкций по сборке.
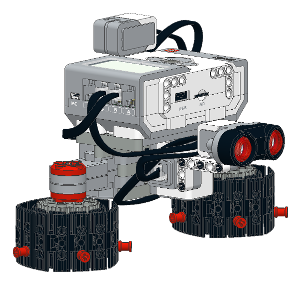
Конвеер-сортировщик шариков
Робот сортирует шарики по двум корзинам.
СКАЧАТЬ ИНСТРУКЦИЮ
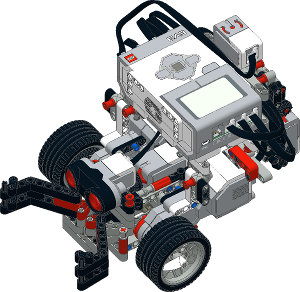
Вездеход
Робот на гусеницах
СКАЧАТЬ ИНСТРУКЦИЮ
Машина с пониженной передачей
В конструкции используется передача для увеличения силы
СКАЧАТЬ ИНСТРУКЦИЮ
Робот-чертежник
Робот рисует разметку
СКАЧАТЬ ИНСТРУКЦИЮ
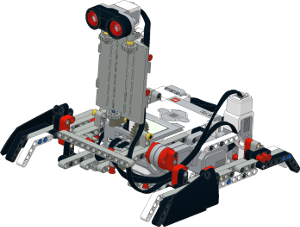
Робот манипулятор
Робот позволяет перемещать объекты в ограниченном пространстве.
СКАЧАТЬ ИНСТРУКЦИЮ
Робот-бот
Простой бот для программирования передвижения.
СКАЧАТЬ ИНСТРУКЦИЮ
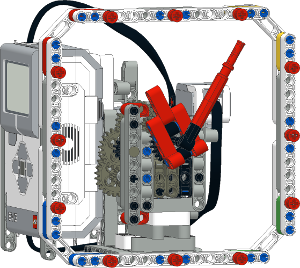
Робот-сортировщик
Робот программируется при помощи цветных квадратиков
СКАЧАТЬ ИНСТРУКЦИЮ
Политика в отношении обработки персональных данных
Робот-манипулятор Arm H25 — стандартная модель для базового образовательного набора LEGO Mindstorms EV3 Education 45544.
Комплектация
- большие моторы — 2 шт.
- средний мотор — 1 шт.
- МПК — 1 шт.
- датчик касания — 1 шт.
- датчик цвета- 1шт.
Скачать инструкцию по сборке данного робота можно ниже
ev3-model-core-set-robot-arm-h25Скачать
Скачать инструкцию по программированию данного робота можно ниже
ArmH24-ProgramСкачать
На этой странице собраны инструкции по сборке роботов или механизмов из стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544). Кроме инструкций вы найдёте здесь видео, показывающие возможности собранных моделей, и демонстрационные программы. Для некоторых моделей даны рекомендации, с помощью каких приложений можно дистанционно управлять роботами и как настраивать эти приложения.

Пушка EV3
Имея под рукой образовательный набор LEGO Mindstorms EV3 (45544) и шарики для пинг-понга вполне можно собрать пушку, стреляющую шариками. Пушкой можно управлять со смартфона с помощью приложения RoboCam.
Робот с большими картонными колёсами
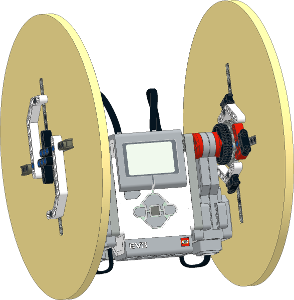
Если вы горите желанием сделать робота с большими колёсами из образовательного набора LEGO Mindstorms EV3 (45544), но у вас нет таких колёс, не расстраивайтесь. Вы можете изготовить их самостоятельно из толстого гофрированного картона. Как сделать робота с большими картонными колёсами, чтобы колёса нормально крутились и не отваливались, я предлагаю вам прочитать в этой статье.
Робот-художник EV3 Print3rbot
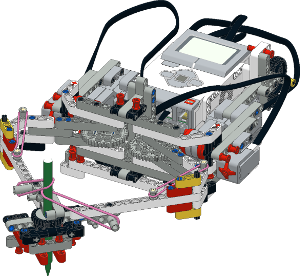
Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.
Управление роботом LEGO Mindstorms EV3 от первого лица
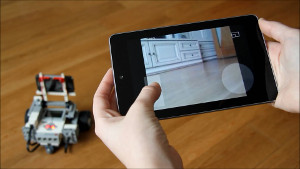
Роботом, собранным из конструктора LEGO Mindstorms EV3, вы легко можете управлять дистанционно от первого лица. Для этого вам дополнительно понадобится два смартфона, с установленным приложением RoboCam на один из них. Давайте познакомимся подробнее с приложением RoboCam и научимся им пользоваться.
Обнаружение лица на EV3

Используя конструктор LEGO MINDSTORMS EV3 и веб-камеру, вы сможете провести эксперимент по обнаружению лиц в помещении. Для эксперимента подойдёт любой колёсный робот EV3, который умеет вращаться на месте, и на который вы сможете закрепить веб камеру. Робот будет сканировать помещение, поворачиваясь вокруг, а, увидев лица, будет останавливаться и дёргаться столько раз, сколько лиц увидел.
Слежение за объектом на EV3
![]()
С помощью веб-камеры и образовательного набора конструктора LEGO MINDSTORMS Education EV3 (45544) вполне можно сделать робота, отслеживающего двигающийся объект. Робот сможет не только поворачивать камеру в сторону объекта, но и выдерживать определённую дистанцию до него, т.е. подъехать поближе, если объект удаляется от камеры, или отъехать подальше, если объект приближается. О том, как это сделать поговорим в этой статье.
Гимнаст EV3
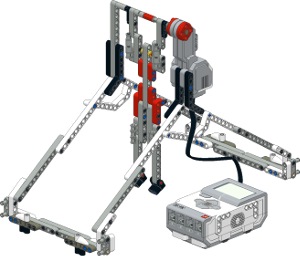
Гимнаста выполняющего различные упражнения на турнике сделать достаточно просто, если у вас есть образовательный конструктор LEGO MINDSTORMS Education EV3 (45544). Я научил гимнаста выполнять три упражнения, а вы можете научить его и другим различным трюкам.
Гоночная машина формула 1 EV3

Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.
Мойщик пола LEGO EV3
Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.
Робот с клешнёй LEGO EV3
Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.
Селеноход из конструктора LEGO EV3
Селеноход – это луноход, созданный российской командой для участия в конкурсе Google Lunar X PRIZE. В настоящий момент проект закрыт, но интересная конструкция с не менее интересной системой передвижения по лунной поверхности остались. С помощью стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544) возможно собрать модель Селенохода, который будет передвигаться по такому же принципу и так же поднимать и опускать «голову».
Собираем часы со стрелками из конструктора LEGO EV3
В базовом образовательном наборе LEGO Mindstorms Education EV3 (45544) оказалось достаточно шестерёнок и других деталей, чтобы собрать часы с часовой и минутной стрелками. Кроме того, что часы точно отображают время, они издают звуковой сигнал каждый час.
Приводная платформа EV3 на гусеничном ходу

В образовательном наборе конструктора Mindstorms Education EV3 всё обучение робототехники в классе ведётся с помощью приводной платформы, на колёсном ходу. Мне же захотелось сделать точно такую же платформу, чтобы на неё точно также можно было установить все датчики, но только, чтобы она передвигалась с помощью гусениц.
Муниципальное бюджетное общеобразовательное учреждение
«Школа № 42 с углубленным изучением отдельных предметов»
городского округа Самара.
Индивидуальный учебный проект
Тема: «Как собрать манипулятор из конструктора Лего на основе микропроцессора EV–3»
Предмет: технология, робототехника
Выполнил: Михайлычев Никита, ученик 9 «Б» класса
Руководитель: Пародина Ольга Александровна,
учитель технологии
Оценка: ______________________________________________
Председатель комиссии: __________________________________________
Члены комиссии: ________________________________________________
___________________________________________________
Самара, 2018
С О Д Е Р Ж А Н И Е
ВВЕДЕНИЕ 3
-
-
-
Обоснование выбора темы. 3
Актуальность темы 3
Постановка проблемы 3
Цель проекта 3
План работы над проектом 3
-
-
-
I. ИССЛЕДОВАНИЯ ПО ПРОБЛЕМЕ 4
1.1 Анализ существующих решений 4
1.2 Техническое задание на проектирование 7
-
II. ПРАКТИЧЕСКОЕ РЕШЕНИЕ ПРОБЛЕМЫ 7
2.1 Разработка и описание конструкции манипулятора 7
2.2 Разработка и описание ПО. 9
ЗАКЛЮЧЕНИЕ 11
Оценка проекта 11
Выводы 11
Информационные источники 12
Введение.
Обоснование выбора темы.
Занимаясь на спецкурсе «Конструирование» мне приходилось собирать разные модели из конструктора Лего, но модель манипулятора я не собирал. За последнее время появилось много видеороликов про такие устройства, можно увидеть, как они устроены и как работают. Но всегда интереснее увидеть работу такого устройства вживую, поэтому я решил собрать эту модель.
Актуальность темы.
На уроках технологии в 7 классе при изучении технологических систем рассматривают разные механизмы и электротехнические устройства, в том числе на примере манипулятора. Этот материал подробно изложен в учебниках, при выполнении заданий учащиеся пользуются теоретической информацией. Если построить модель манипулятора, то урок будет проходить интереснее и более наглядно.
Постановка проблемы.
Хотелось, чтобы для проведения уроков технологии по изучению механизмов и электротехнических устройств в технологических системах использовалась рабочая модель манипулятора, но в настоящее время такой модели нет.
Цель проекта.
Разработать и построить действующую модель манипулятора в форме руки из конструктора Лего на основе микропроцессора EV–3.
План работы над проектом.
- Проанализировать существующие решения.
- Составить техническое задание на проектирование.
- Разработать и описать конструкцию манипулятора.
- Написать программу управления конструкцией.
- Протестировать модель.
- Оценить получившиеся результаты.
I. Исследование по проблеме.
1.1 Анализ существующих решений.
Манипулятор — механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов. Это значение закрепилось за словом с середины XX века, благодаря применению сложных механизмов для манипулирования опасными объектами в атомной промышленности. Используется для перемещения различных грузов, получил широкое развитие в современном обществе. Дело в том, что многие материалы, с которыми приходится иметь дело в этой области науки, обладают радиоактивностью – свойством выделять в окружающее пространство опасные для здоровья человека лучи. Механические руки стали устанавливать там, куда доступ человека нежелателен, а сам он, управляющий руками, располагался в другом, безопасном помещении. Сейчас манипуляторы используют в разных производствах.


Рисунок 1. Манипулятор в металлургии
Кран-манипулятор — кран стрелового типа, установленный на автомобильном шасси и служащий для его загрузки и разгрузки одиночными и сыпучими грузами в контейнерах и их транспортировки.

Рисунок 2. Передвижной кран-манипулятор
Для людей с ампутированной конечностью существует Бионический протез.
Bebionic —биоэлектрическая искусственная кисть с приводом электромеханическим и микропроцессорным контролем, созданная для восстановления функции ампутированной конечности.

Рисунок 3. Бионический протез
Принцип действия бионического протеза:
После травмы или в ходе болезни конечность ампутируют. Оставшаяся культя состоит из множества тканей: кожи, мышц, костей, сосудов и нервов. Хирург во время операции выводит сохранившийся двигательный нерв на остающуюся крупную мышцу. После заживления операционной раны нерв может передавать двигательный сигнал. Этот сигнал воспринимает датчик, установленный на протезе. В процессе восприятия нервного импульса участвует сложная компьютерная программа.
Минусы такого протеза:
У такого протеза единственный минус. Это его стоимость.Стоимость бионического протезирования пока высока и может достигать в сложных случаях миллионов рублей. Однако возврат к полноценной жизни трудно оценить в материальном исчислении. По сути, установка бионических протезов – единственная возможность для инвалида вернуться к нормальной жизни: строить и осуществлять планы, содержать семью, добиваться карьерных вершин.
NiryoOne – это 6-осевой манипулятор, созданный специально для производителей, системы обучения и небольших компаний. Согласно Niryo, имеющий шесть осей перемещения манипулятор позволяет выполнять задачи, которые до сих пор были доступны исключительно промышленным роботам. Манипулятор может выбрать и положить на место предметы с помощью вакуумного насоса, захвата или электромагнита. Он поможет автоматизировать 3D-принтер, позволит сверлить отверстия в изделиях. Он может выполнять необходимые домашние работы и даже творчески развлекать детей.

Рисунок 4. Манипулятор серии NiryoOne
Минусы NiryoOne:
Минусом такого манипулятора является его большая стоимость, его можно приобрести за сумму 20000 – 200000 долларов.
1.2 Техническое задание на проектирование.
Проведя анализ существующих манипуляторов, делаем вывод, что форма устройства напоминает руку человека, движения осуществляются с помощью механизмов, таких как рычаг, зубчатые передачи.
Необходимо спроектировать и собрать механическую руку из конструктора ЛЕГО. Манипулятор должен захватывать предметы и перемещать их в нужное место. Для обеспечения автоматической работы устройства необходимо программное обеспечение.
II. Практическое решение проблемы.
2.1 Разработка и описание конструкции манипулятора.
1 
 ) Для создания самой руки требуется основание, которое могло бы удержать эту руку. После сборки основания на него нужно установить Миникомпьютер Lego MINDSTORMS EV3 и Большой Сервомотор Lego MINDSTORMS EV3 с зубчатым механизмом, которые приводили бы в движение руку, а также датчик касания, при нажатии на который рука бы останавливалась в нужном месте.
) Для создания самой руки требуется основание, которое могло бы удержать эту руку. После сборки основания на него нужно установить Миникомпьютер Lego MINDSTORMS EV3 и Большой Сервомотор Lego MINDSTORMS EV3 с зубчатым механизмом, которые приводили бы в движение руку, а также датчик касания, при нажатии на который рука бы останавливалась в нужном месте.

2) После сборки основания создаем саму руку. Для того, чтобы рука могла подниматься или опускаться, ставим на конструкцию руки Большой Сервомотор Lego MINDSTORMS EV3 с зубчатым механизмом и датчиком цвета, для того чтобы рука поднималось на определенную высоту.

3) После сборки конструкции руки нужно собрать захватывающий механизм из Среднего Сервомотора Lego MINDSTORMS EV3, с зубчатым механизмом выполняющий роль пальцев.





4 ) После сборки захватывающего механизма устанавливаем его на конструкцию руки и подключаем все сервомоторы и датчики к Миникомпьютеру.
) После сборки захватывающего механизма устанавливаем его на конструкцию руки и подключаем все сервомоторы и датчики к Миникомпьютеру.

2.2 Разработка и описание ПО.
Прежде чем приступать к составлению компьютерной программы, необходимо составить логическую последовательность действий манипулятора.
Опустить захват.
Сомкнуть захват, захватив предмет.
Поднять предмет.
Повернуть манипулятор на определенный угол.
Опустить предмет.
Разжать захват.
Поднять захват.
Повернуть манипулятор в исходное положение.
Повторить программу необходимое число раз.
В системе ПО записывается подпрограмма для калибровки и синхронизации моторов:

Затем записываем основную программу. Для этого мы должны в программе запрограммировать две кнопки, при нажатии одной из них рука повернулась в определенную сторону, в зависимости от того, где находится предмет:

Потом мы должны запрограммировать средний и большой сервомотор, находящиеся на конструкции руки для того, чтобы рука опустилась с помощью большого сервомотора и захватила предмет с помощью среднего сервомотора:

После того, как рука захватила предмет, мы записываем в программе для большого сервомотора на основании программу для возращения руки в то же положение, в котором она была изначальна. И для среднего, и большого сервомотора находящиеся на конструкции руки мы записываем программу для того, чтобы рука опустилась и отпустила предмет:

ЗАКЛЮЧЕНИЕ.
1.Оценка проекта.
Мне все же удалось достичь цели проектирования, потому что моя модель манипулятора соответствует техническому заданию на проектирование. Манипулятор выполняет следующие действия: захватывает предмет, осуществляет подъем предмета, затем поворачивается на заданный угол, опускает предмет и раскрывает захват, долее поднимается и возвращается в исходное положение. Работа манипулятора выполняется по заданной программе.
2.Выводы.
Полученная модель будет являться хорошим наглядным пособием для уроков технологии в 7 классе при изучении механизмов и электротехнических устройств в технологических систем.
Работая над этим проектом, мне потребовались такие умения, как: находить и обрабатывать информацию, читать схемы, чертежи, моделировать и конструировать устройства из конструктора Лего, составлять компьютерную программу, используя язык объектно-ориентированного программирования, работать с текстовым редактором, создавать презентацию в приложении Power point.
Информационные источники:
https://www.lego.com/ru-ru/mindstorms/
https://ru.wikipedia.org/wiki/Заглавная_страница
https://studbooks.net/2085604/informatika/mehanicheskie_ruki
https://www.popmech.ru/science/235633-kak-rabotayut-bionicheskie-protezy/#part0
http://www.robogeek.ru/interesnoe-o-robotah/niryo-one-dostupnyi-6-osevoi-manipulyator
Автор материала: Н. Михайлычев (9 класс)