Время на прочтение
10 мин
Количество просмотров 82K
Сегодня популярность гонок на дронах стремительно растёт. Любительские полетушки перерастают в серьёзные международные соревнования, а количество людей, вовлечённых в это хобби, растёт в прогрессии. Я сам недавно собрал FPV-квадрокоптер 180-го размера (расстояние в мм между осями моторов по диагонали) и спешу поделиться этим опытом.

Полностью процесс сборки и настройки я описал тут и тут, а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке.
На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них — наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер — это такой промежуточный формат, который «ни нашим, ни вашим». Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. «Промежуточность» 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой — то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. «В народе» на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Для своего квадрика моторы я взял — RCX H2205 2633KV. Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX — вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое.
С остальными комплектующими действовал по принципу «больше челленджа»:
- Рама RC180 V2. Недорогая (брендовые аналоги в 2-3 раза дороже), лёгкая, с хорошей компановкой и нижней пластиной 3мм. К сожалению, отдельно запчастей к ней не купить, но, учитывая цену всей рамы, вполне можно купить 1-2 комплекта на запчасти.
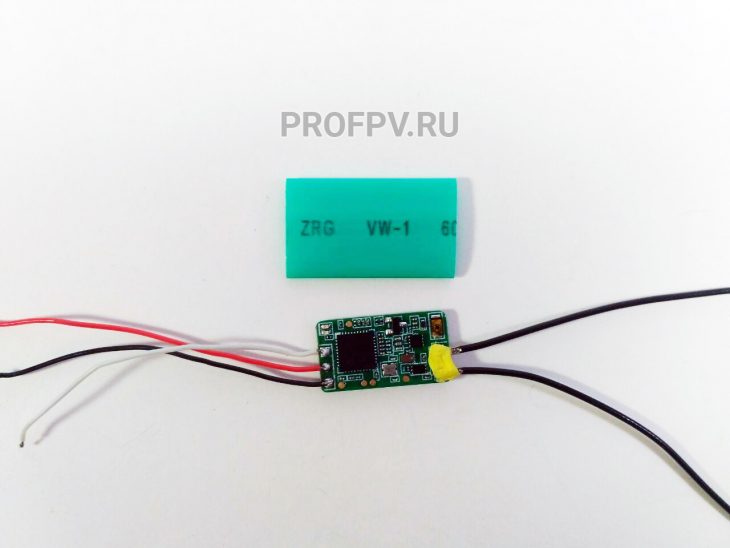
- Приёмник FrSky D4R-II. Поначалу хотелось попробовать FrSky X4R-SB, но в этом случае пришлось бы менять модуль на передатчике, а этого делать совсем не хотелось. Забегая вперёд скажу, что разумнее брать версию приёмника без припаянных разъёмов. У себя я всё равно их отпаял.
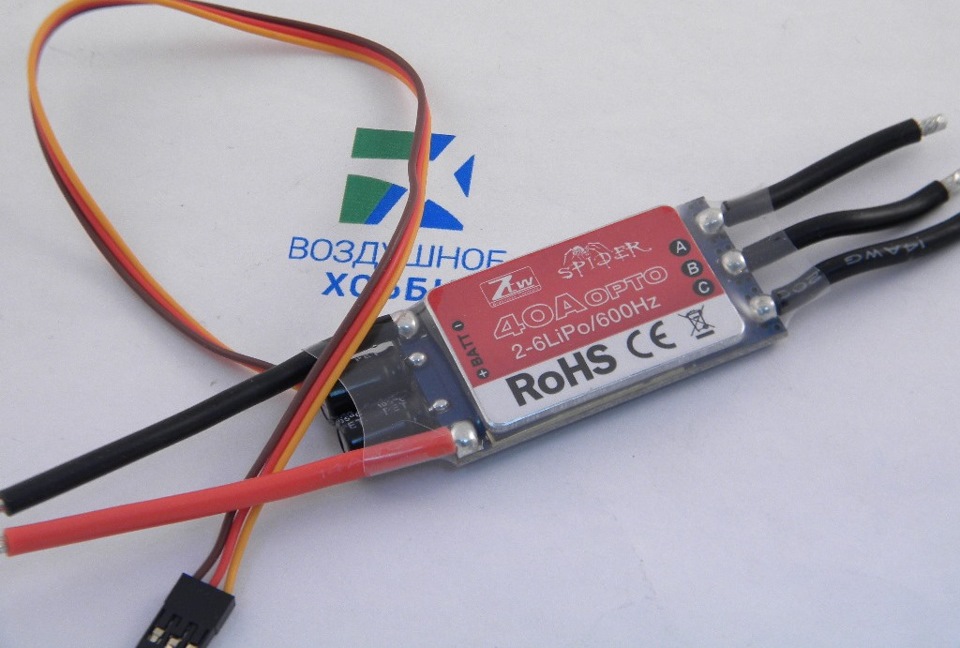
- Регуляторы FVT LittleBee 20A — недорогие и проверенные, но сейчас уже устаревшие. Когда я их покупал только-только появились в продаже FVT LittleBee 20A PRO на чипе Silabs F396 (та версия, что у меня использует чип Silabs F330), а на момент написания статьи уже принимались предзаказы на FVT LittleBee 20A-S, заточенные под BLHeli_S. Здесь можно почитать о технических стороне регуляторов LittleBee 20A.
- Видеопередатчик Foxeer FX799T — компактный, популярный и с микрофоном.
- Камера Sony Super HAD CCD 600TVL (IR Block, NTSC, объектив 2.8). Можно было и Foxeer XAT600M, но мне нужна без корпуса.
- Держатель камеры Diatone.
- Антенна-«клевер» BeeRotor и кабель-удлинитель.
- MICRO MinimOSD.
- В комплекте с рамой уже есть плата распределения питания, но я не хочу её использовать. Поэтому заказал Matek Mini Power Hub, она намного удобнее. Кстати, при использовании батарей 3S, эта PBD издаёт громкий свист и это никак не лечится.
- Несколько батарей Turnigy nano-tech 1300mAh 4S 45~90C.
- Подсветка с пищалкой ZG 12Bit WS2812B LED Board. Позднее выяснилось, что пищалка либо не работает, либо есть какие-то неизвестные (никакой документации не прилагалось) нюансы в подключении. В итоге поставил другую.
- Несколько комплектов пропеллеров DYS 3-blade 4040 Bullnose.
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. В недорогие наборы для сборки часто включают контроллер CC3D, так сейчас это, пожалуй, самый дешёвый ПК. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и «пищалка». Его преемник CC3D Revolution — это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€.
Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€.
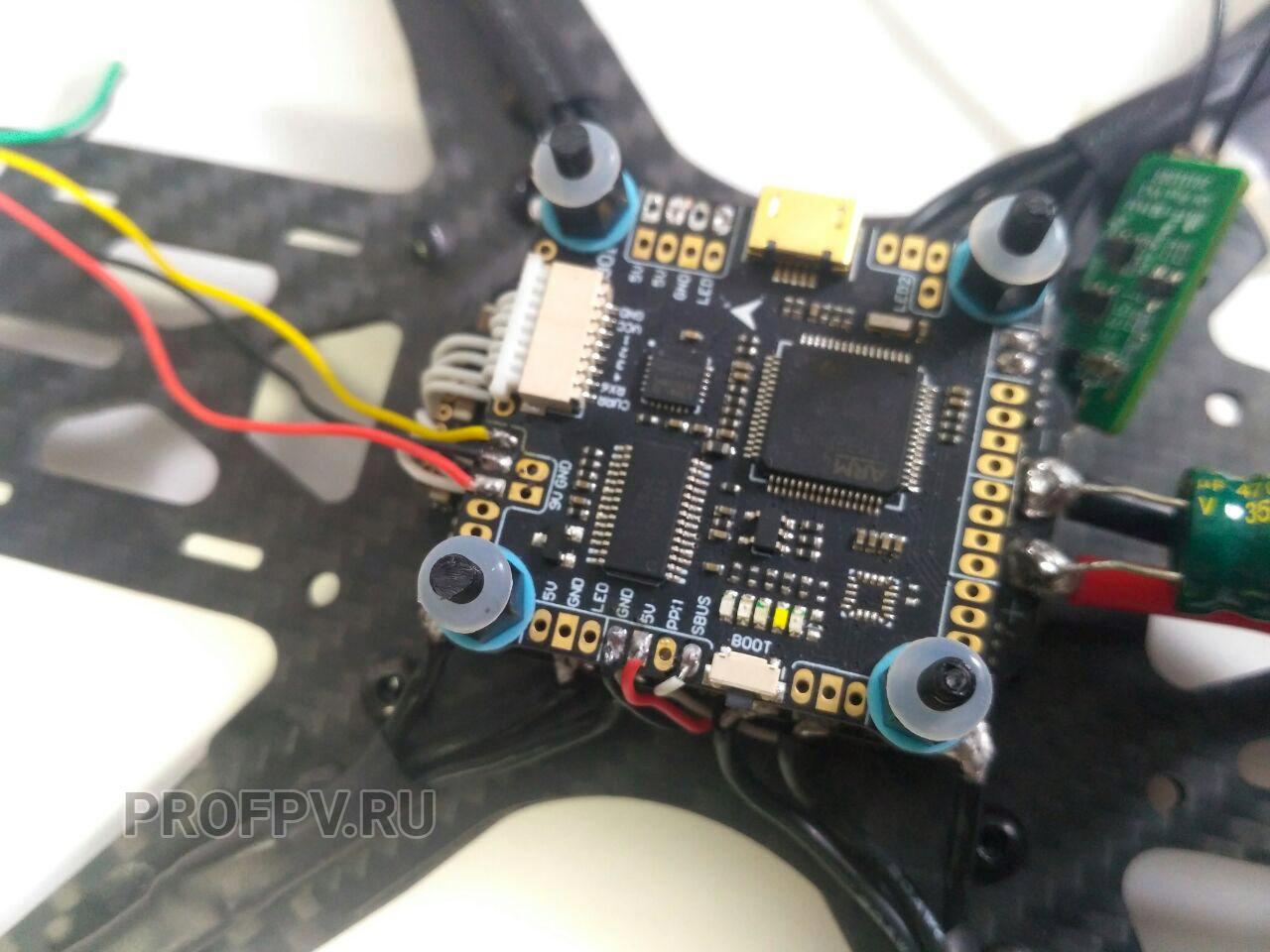
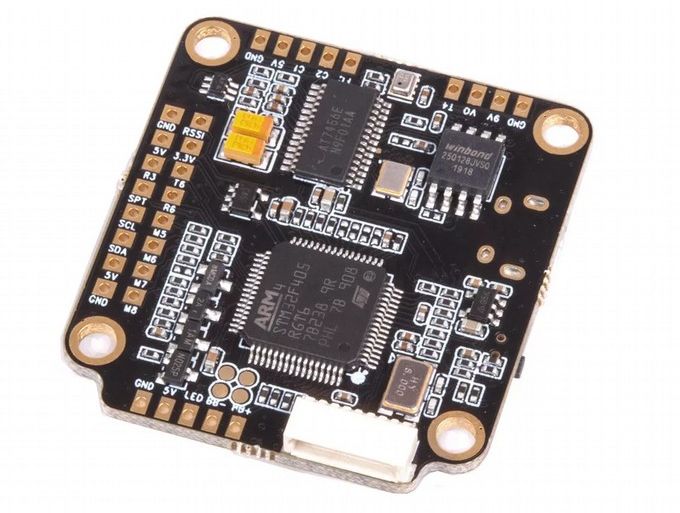
Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.)
Отдельно отмечу модную ныне тенденцию объединять несколько плат в одну. Чаще всего ПК и OSD или ПК и PDB Я не поддерживаю данную идею за парой исключений. Мне не хочется менять весь полётный контроллер из-за сгоревшей OSD. К тому же, как показывает практика, иногда такое объединение приносит проблемы.
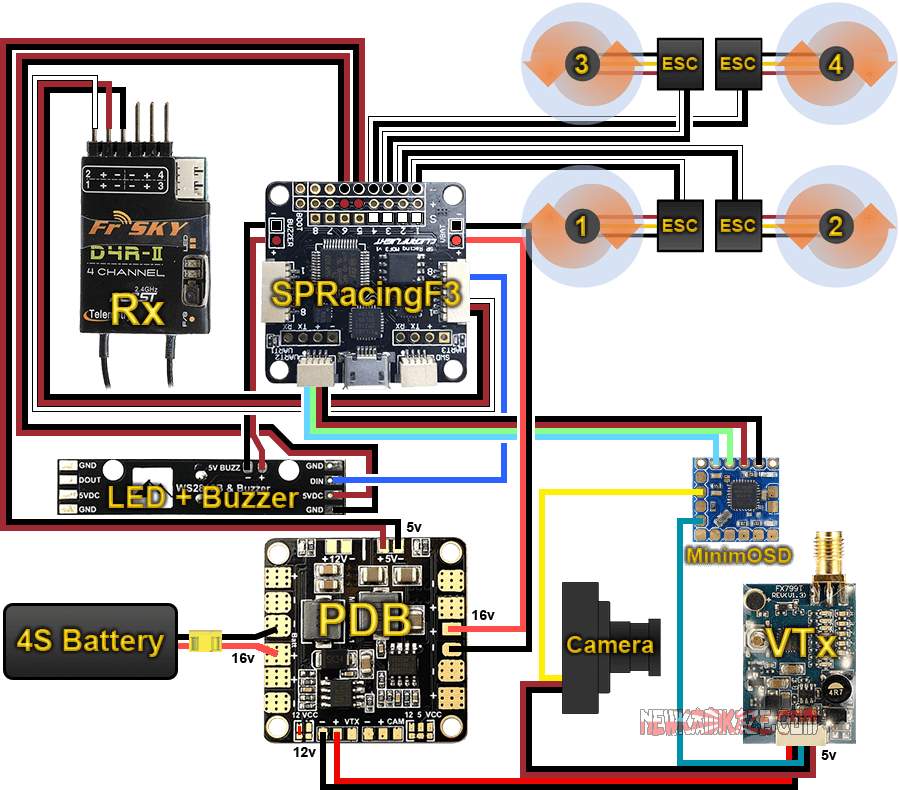
Схема проводки
Понятное дело, что все компоненты, которым нужно питание 5В или 12В, будут получать его от BEC`ов платы распределения питания. Камеру теоретически можно было запитать напрямую от 4S-батареи, благо входное напряжение это позволяет, но ни в коем случае делать этого не стоит. Во-первых, все камеры очень восприимчивы к шумам в цепи от регуляторов, что выразится в помехах на картинке. Во-вторых, регуляторы с активным торможением (такие, как мои LittleBee), при активизации этого торможения, дают в бортовую сеть очень серьёзный импульс, что может сжечь камеру. Причём, наличие импульса напрямую зависит от износа батареи. У новых его нет, а у старых — есть. Вот познавательное видео на тему помех от регуляторов и чем их фильтровать. Так что камеру лучше питать либо от BEC`а, либо от видеопередатчика.
Также, ради улучшения качества картинки, рекомендуется пустить с камеры на OSD не только сигнальный провод, но и «землю». Если скрутить эти провода в «косичку», то «земля» действует, как экран для сигнального провода. Правда в данном случае я этого не делал.
Коли уж зашла речь о «земле», то часто спорят о том, надо ли подключать «землю» от регуляторов к ПК или достаточно одного сигнального провода. На обычном гоночном квадрокоптере однозначно надо подключать. Её отсутствие может привести к срывам синхронизации (подтверждение).
Конечная схема проводки получилась простой и лаконичной, но с парой нюансов:
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.
Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
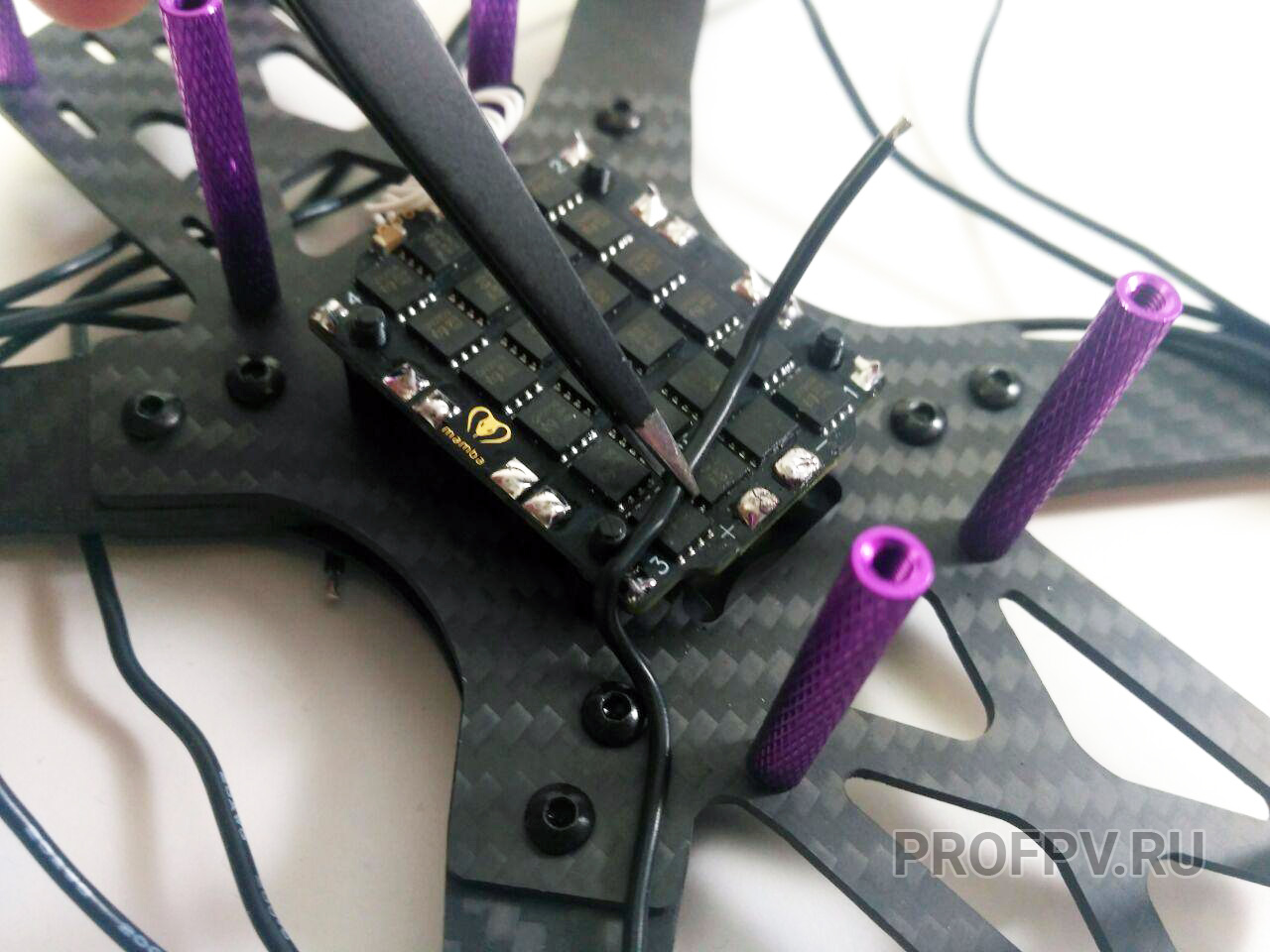
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч + одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе — КЗ.

Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение).
Камера не помещалась по ширине между боковых пластин рамы. Немного обработал края её платы надфилем (скорее сточил шероховатости) и она встала без проблем. Но сложности на этом не кончились. Мне очень понравилось качество держателя для камеры от Diatone, но камера с ним не помещалась в раму по высоте (примерно на 8-10мм). Сначала я приколхозил держатель на наружной (верхней) стороне пластины через неопреновый демпфер, но конструкция получилась ненадёжной. Позже пришла идея максимально простого и надёжного крепления. Я взял только хомут от Diatone`овского крепления и одел его на отрезок прута с резьбой М3. Чтобы камера не сместилась вбок, я зафиксировал хомут нейлоновыми муфтами.

Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками. Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.

Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.
Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.

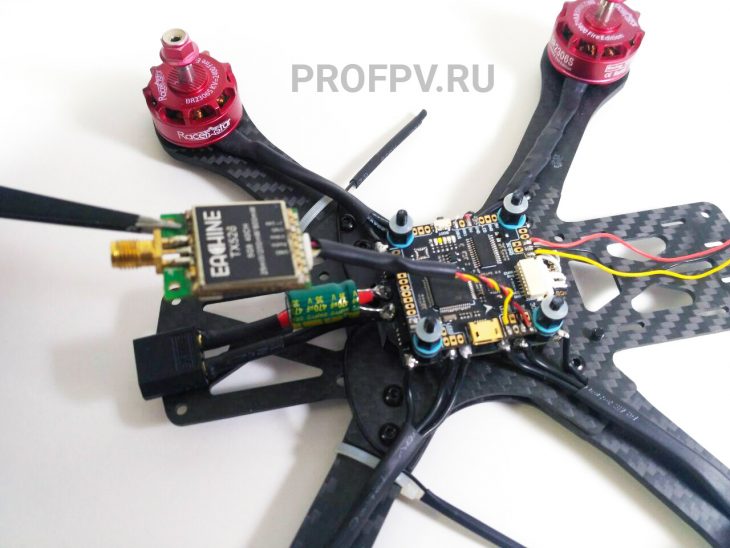
Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.

Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель.
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.
Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.

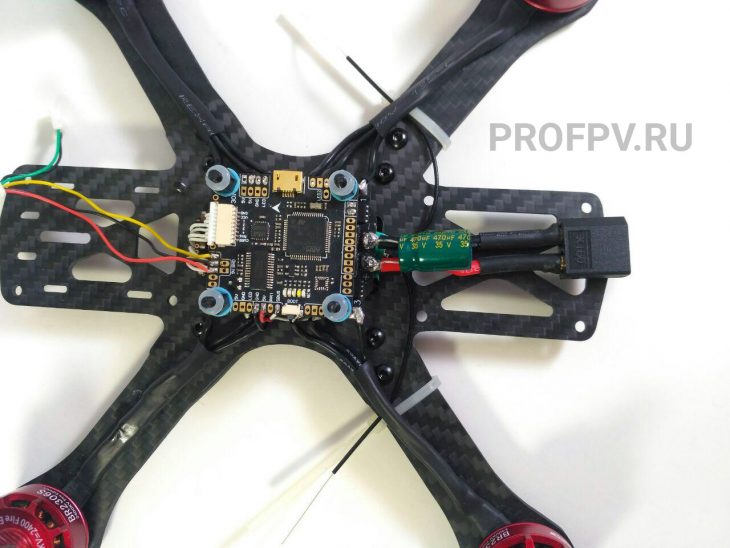
Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть здесь. Масса квадрокопрера без батареи составляет 330г, с батареей — 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.
Все началось с того, что нам очень понравилась FPV камера Caddx Tarsier 4K из-за принципа 2 в 1, так как не надо будет лепить экшен-камеры на раму квадрокоптера. Поэтому, было решено собрать квадрокоптер вместе с этой камерой, хоть она и предназначена для микро-квадрокоптеров.
Далее в статье мы объясним, каким образом была закреплена плата и сама камера в раме. Пошаговая сборка квадрокоптера своими руками под силу любому, кому интересна эта тема, в статье все рассказываем максимально подробно.
Содержание
- Что нужно для сборки квадрокоптера? Инструменты
- Вступление
- Электроника квадрокоптера и другие компоненты
- Сборка квадрокоптера. Собираем дрон своими руками
- Схема монтажа
- Сборка рамы
- Подключение моторов квадрокоптера: установка двигателей
- Установка полетного контроллера
- Монтаж проводов для камеры
- Монтаж приемника
- Установка видеопередатчика и пищалки
- Монтаж Caddx Tarsier 4K в стэк, в башню
- Последние штрихи
- Прошивка и настройка квадрокоптера после сборки своими руками
- Прошивка регуляторов оборотов в BLHeliSuite
- Прошиваем полетный контроллер в Betaflight Configurator
- Вкладка Система
- Вкладка Порты
- Вкладка Конфигурация
- Вкладка Питание и батарея
- Вкладка Приемник
- Вкладка Режимы
- Вкладка Моторы
- Вкладка OSD
- Вкладка Командная строка (CLI)
- Фотографии
- Таблица компонентов и примерная цена
- Заключение
Что нужно для сборки квадрокоптера? Инструменты
Набор инструментов стандартный, но без него у вас не получится собрать квадрокоптер. И так, вам потребуется следующий инструмент для пошаговой сборки квадрокоптера:
- Паяльник;
- Припой 63/37;
- Флюс активный или нейтральный (я использую ФИМ, активный, но активный флюс надо обязательно хорошо смывать, иначе будет разъедать контакты);
- Пинцет;
- Ключи под шестигранники и головка для гаек;
- Канцелярский нож или любой инструмент для обрезки проводов и снятия изоляции;
- Термоусадка;
- Зажигалка;
- Линейка или рулетка;
- Пластиковые стяжки;
- Фиксатор резьбы синий (можно использовать и красный, но в малых количествах);
- Мультиметр для прозвонки цепи на случай короткого замыкания.

Что еще понадобится именно для этой сборки:
Вступление
Когда вышла эта камера, очень уж захотелось применить ее в обычном мини квадрокоптере, хотя предназначена они для микро дронов. Основной причиной выбора была компактность, качество видео и экономия места, потому что больше не нужно будет навешивать экшен-камеры на дрон и производить лишние манипуляции. Плюсом будет и то, что к камере можно подключаться по Wi-Fi (она создает свою точку доступа) и скачивать видео на телефон, смотреть видео с камеры в реальном времени (хоть и с задержкой), а также производить настройки.
Ну и конечно же, это камера умеет записывать видео, при этом, наверху дрона ничего не будет торчать.
Не забывайте, что пошаговая сборка квадрокоптера это творчество и не обязательно следовать инструкциям и делать так, как показано в статье. Вы можете включить фантазию и сделать иначе или вообще этого не делать. Это хобби, которое должно приносить удовольствие от конструирования, настройки — пользуйтесь этим и не ставьте себе рамки/ограничения.
Читайте также: Caddx Tarsier 4K — FPV камера с топовым разрешением и двумя объективами
Электроника квадрокоптера и другие компоненты
Инструменты перечислили, теперь нужно перечислить и компоненты, из которых собирается квадрокоптер:
- Рама;
- FPV камера (в нашем случае, а это Caddx Tarsier);
- Полетный контроллер с регуляторами оборотов 4 в 1 (там же и плата распределения питания);
- Видеопередатчик;
- Приемник;
- Аккумулятор;
- Антенна для видеопередатчика;
- Крепления для аккумулятора.
Все ссылки на компоненты вы найдете в конце статьи в виде таблицы.
Сборка квадрокоптера. Собираем дрон своими руками
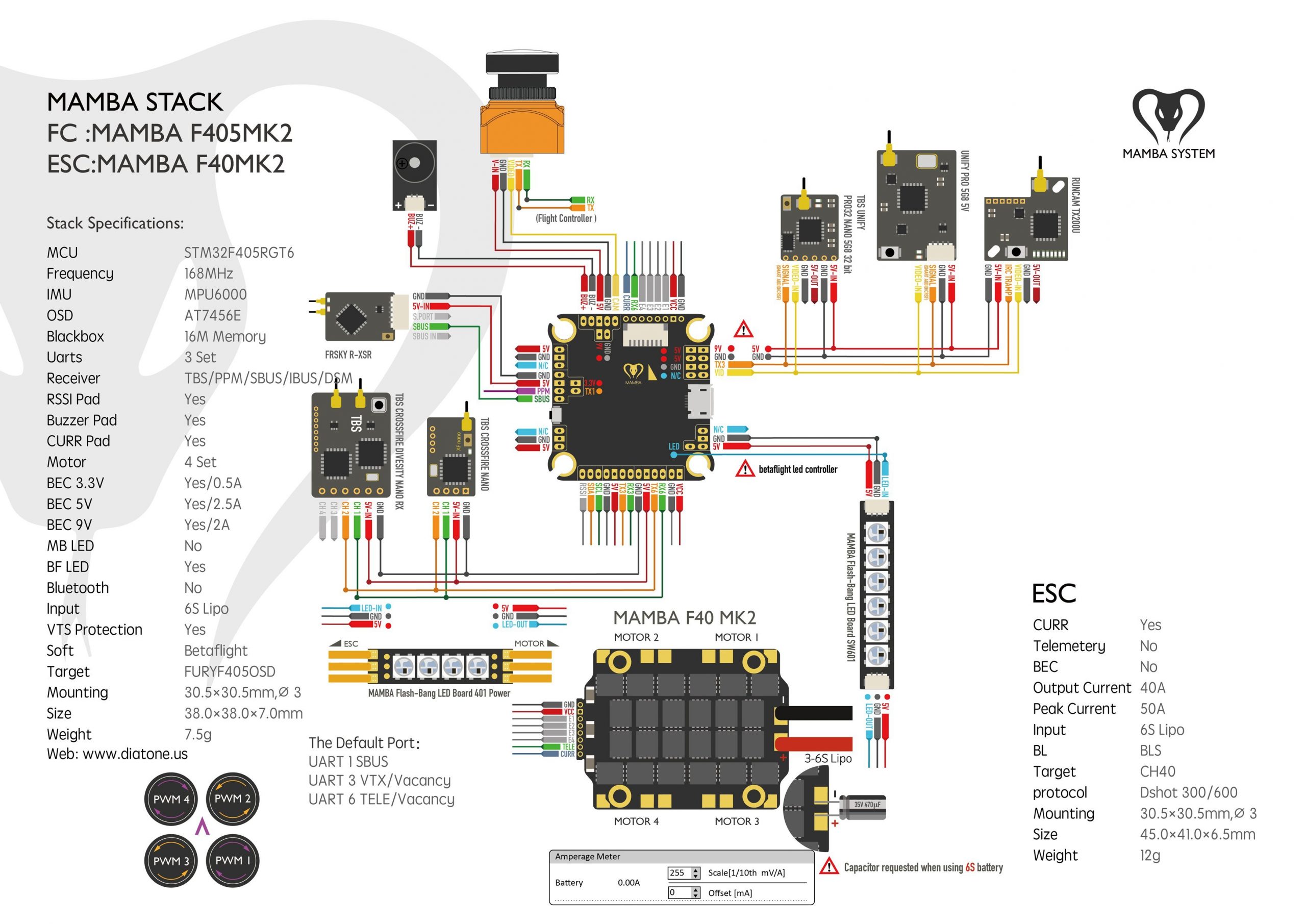
Схема монтажа
Подключать все компоненты будет согласно этой схемы:
Сборка рамы
В качестве базы была выбрана классическая рама 115 мм под названием Martian. Стандартный тип — Гибридный X:

Фиолетовые стойки придают стильности и цвета сборке.
Собирается легко, в наборе идет напильник, которым можно при желании обработать углы деталей, они могут быть острыми. Сначала собирается нижняя плашка с нижними лучами.
Стойки пока не устанавливайте, так как они в дальнейшей сборке будут мешать паять провода. Я поторопился и прикрутил их, после чего снова открутил.
Здесь вам понадобится шестигранник, а также головка для гаек, чтобы затянуть нижнюю часть.
Затем, установите пластиковые стойки для установки башни из регулятора оборотов, полетного контроллера и так далее. С обратной стороны они затягиваются винтами

Для того, чтобы регуляторам оборотов было мягче «сидеть» на стойках, наденьте на них силиконовые демпферные колечки. Они идут в комплекте с рамы:

Затем, вам нужно взять регулятор оборотов, и залудить контакты, к которым будет припаивать провода двигателей. Если впервые паяете, то для начала смажьте паяльным флюсом площадки, затем возьмите припой и тут двумя способами: либо приложите проволоку припоя к контакту и расплавьте паяльником, либо расплавьте припой на жало паяльника и после этого приложите каплю к контакту. После этого установите регулятор(ы) оборотов на стойки:
Подключение моторов квадрокоптера: установка двигателей
Второй этап пошаговой сборки квадрокоптера. Раньше было популярно производить двигатели с правой и левой резьбой, чтобы в процессе полета гайки всегда самозатягивались, но в последнее время все чаще производители продают двигатели с резьбой на валу только в одну сторону. Но это совсем не проблема, так как используются контр-гайки, которые и так не будут откручиваться. Плюсом к этому будут минимальные допуски — пропеллеры садятся туго и держатся крепко даже без гаек.
Поэтому, просто покупайте сразу по 4 штуки двигателей без привязки к стороне, в которую они должны крутиться, это мы потом поправим при настройке прошивки.
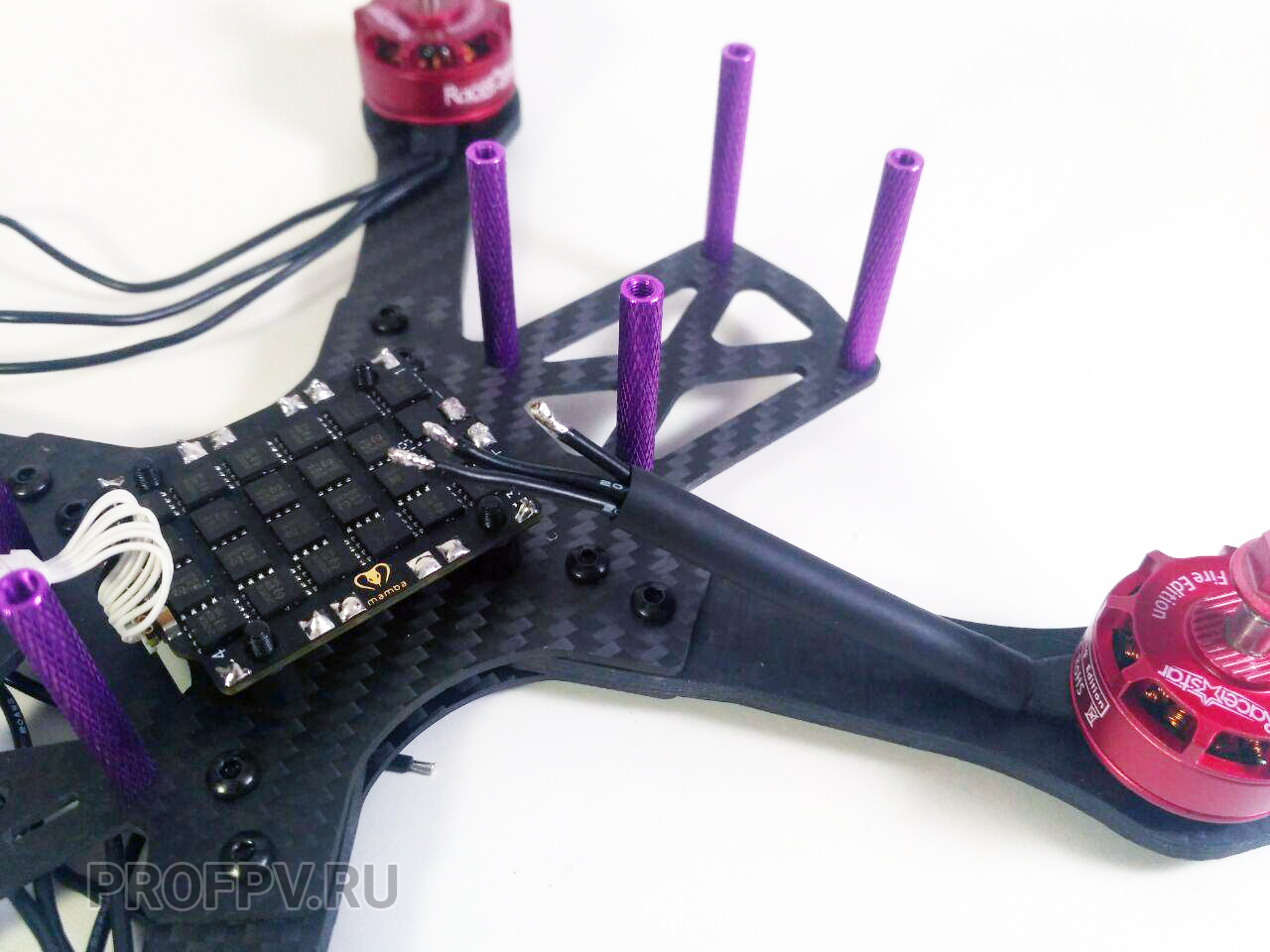
Чтобы все смотрелось красиво, можно использовать оплетку жгутов или шнуров, например, вот так:

А можно использовать просто термоусадку. Будет менее красивее, но защита такая же.
В комплекте с двигателями будут идти 2 размера винтов, для толстой рамы и для тонкой рамы. Так как у этой рамы лучи толщиной 5 мм, то используйте самые длинные винты. До оплетки двигателя они не достанут.
Теперь вам потребуется фиксатор резьбы. Продается в любом магазине автозапчастей. Использовать желательно синий, но если остался красный, то просто лейте его в очень малых количествах на резьбовые соединения. Выглядит он так:

Смажьте винты и прикрутите двигатели к раме. Будьте аккуратны и не сорвите резьбу.

После того, как прикрутите двигатели, отмерьте длину проводов, которую нужно будет оставить для припаивания. Отмерять нужно на напрямую, а с учетом изгибов. Вот так:
Провода припаиваются также, как идут от двигателя — по порядку, хотя и можно нарушить порядок и поменять крайние провода местами, тогда двигатель начнет крутиться в другую сторону. А вот средний провод перепутать нельзя, он должен быть обязательно по центру и припаян к средней площадке.
После того, как отмерите, отрежьте лишнее, удалите изоляцию с концов, залудите. Отмерьте и отрежьте кусок термоусадки, либо оплетки и наденьте на провода:
Теперь все это дело нужно припаять. Прогревать надо хорошо, чтобы получился качественный контакт, иначе у вас могут возникнуть проблемы в виде того, что при запуске двигатели будут отключаться (как один из вариантов):
Затем проходим по термоусадке зажигалкой или феном для пайки, чтобы она стянулась.
Установка полетного контроллера
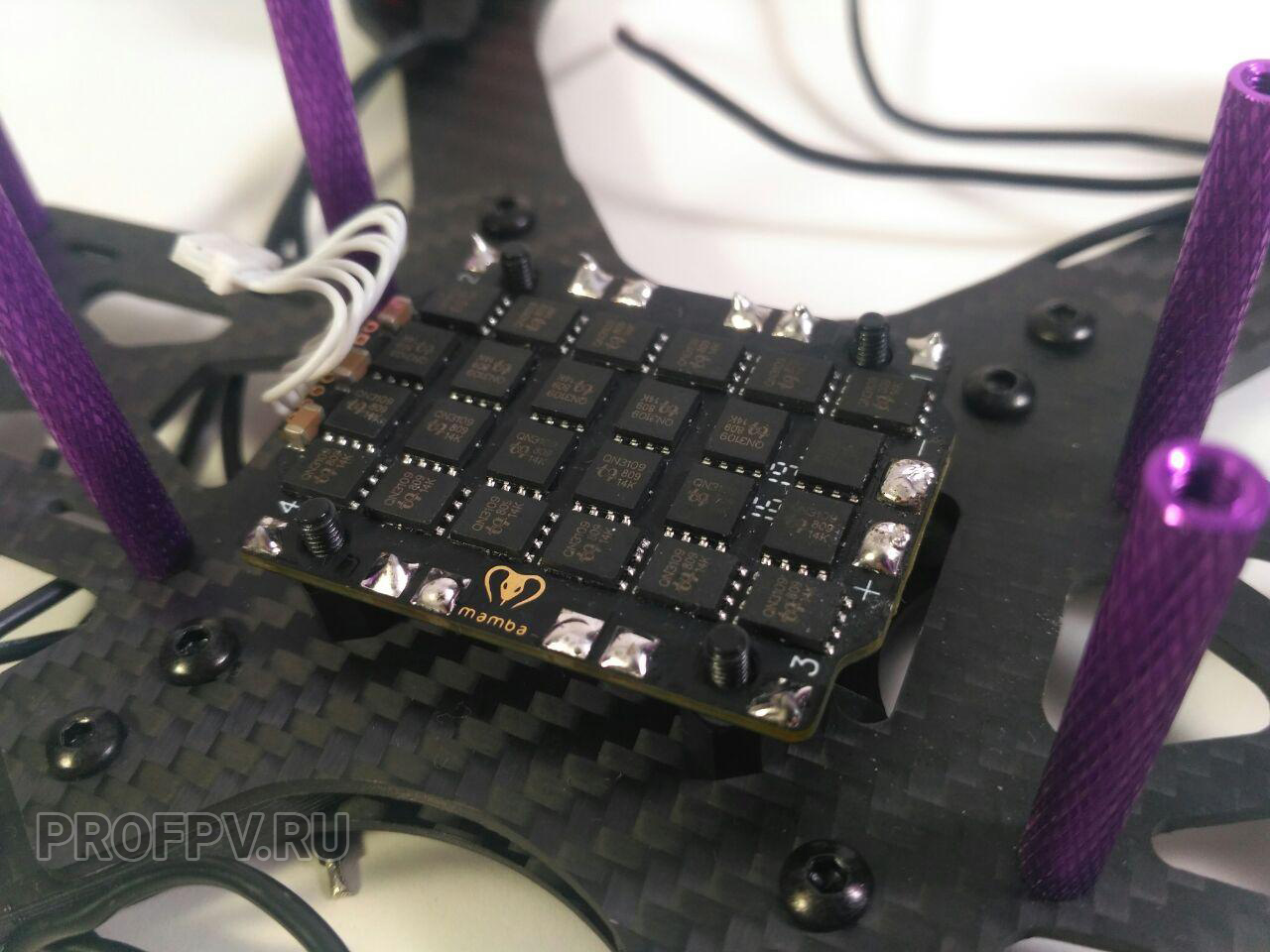
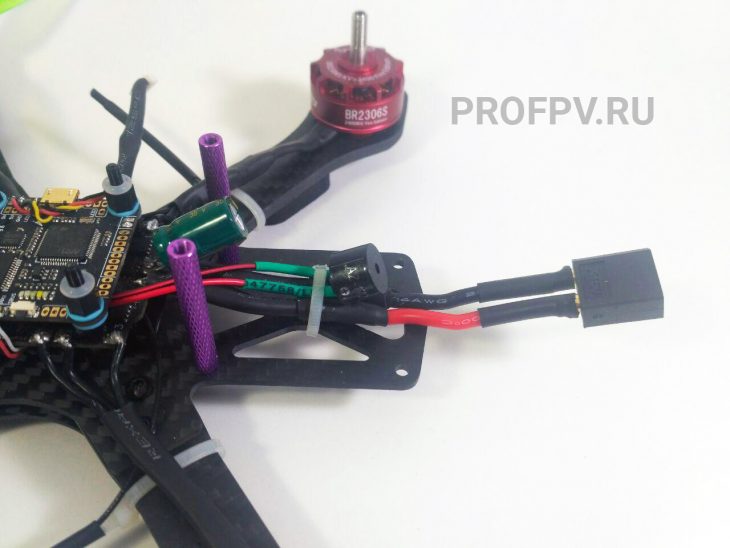
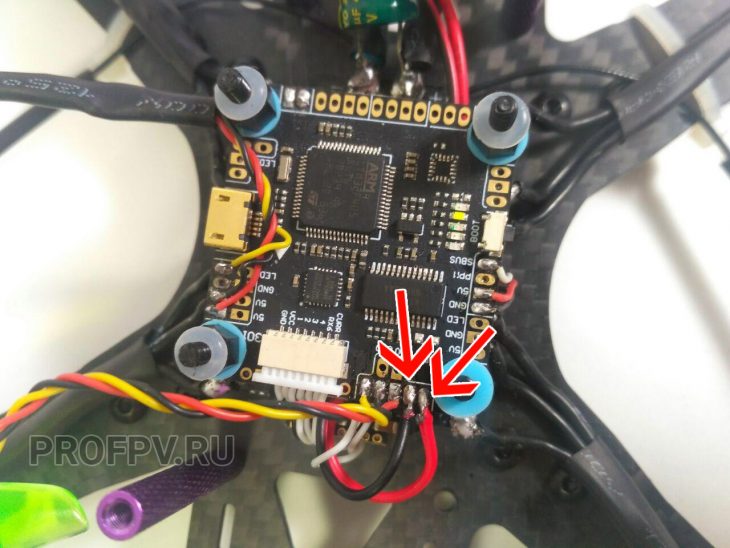
Пошаговая сборка квадрокоптера включает в себя установку полетного контроллера. Вам нужно припаять провода и конденсатор для подключения аккумулятора. Забыл сфотографировать этот момент, поэтому фото уже после нескольких шагов. Соблюдайте полярность. В комплекте с Mamba F405 шли короткие провода, поэтому пришлось наращивать дополнительные, чтобы хватало удобно подключать аккумулятор. Изначально припаял короткие, подумав, что будет удобно подключать, но после сборки понял, что не совсем и быстренько переделал их. Делайте так, чтобы провод выходил за раму на несколько сантиматеров. Места контактов тоже оборачиваем в термоусадку. На конденсаторе есть «+» и «-«, это все хорошо припаиваем к плате с регуляторами оборотов. Контакт должен быть хороший, поэтому, дайте припою прогреться:

Далее устанавливаем на пластиковые стойки полетный контроллер. В комплекте идут синие демпферные амортизаторы. Они нужны, чтобы гасить вибрации и колебания, чтобы не мешать работе гироскопу. Наверх насаживаем пластиковые гайки и затягиваем, но не сильно туго. Подключаем белый коннектор от регуляторов оборотов к полетному контроллеру. Как видите, к этому этапу были убраны почти все фиолетовые стойки, потому что мешали. Не повторяйте эту ошибку и не ставьте их раньше времени:
Монтаж проводов для камеры
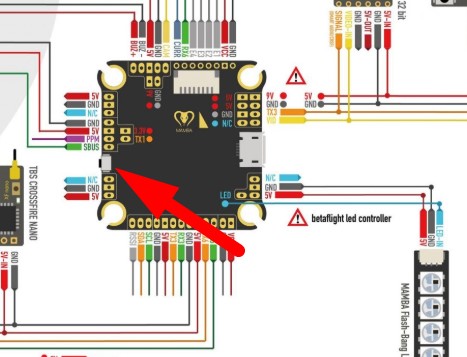
Далее припаиваем провода от камеры. Согласно схемы, мы можем припаять контакты к этим площадкам:


На фото выше:
- желтый провод — видео;
- черный — земля;
- красный — 5 V.
Отходящий проводок (зеленый + черный) это контакт для подключения джойстика управления камерой. Но Caddx Tarsier 4K настраивает с телефона через приложение, поэтому, если хотите, можете отрезать лишние провода.
Монтаж приемника
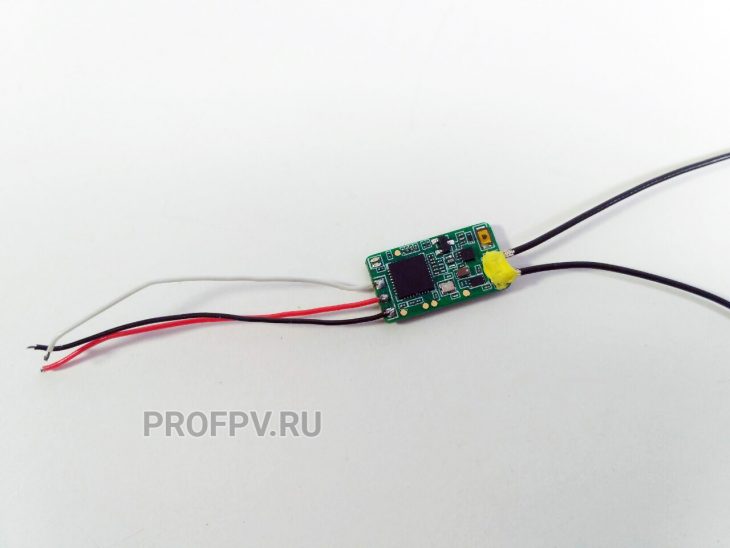
Приемник используется FrSky XM+.
Припаиваем к нему 3 провода:
- Белый — сигнал;
- Красный 5 V;
- Черный — земля.
Провода припаиваете как показано на фото ниже (на обратной стороне есть маркировка):
Сразу отрезаем по размеру термоусадку. В нее спрячем приемник после монтажа.
Просовываете провода под низ полетного контроллера. Припаиваемся к этим контактам:
Должно получиться вот так.
На этом этапе сборки квадрокоптера нужно привязать приемник, пока вы его не спрятали в термоусадку. Берем радио, включаем, настраиваем модельку (даем имя), ставим на строчке Ch. Range — Ch1-16, Mode D16. Доходим до вот этой строчки и нажимаем колесиком на нее: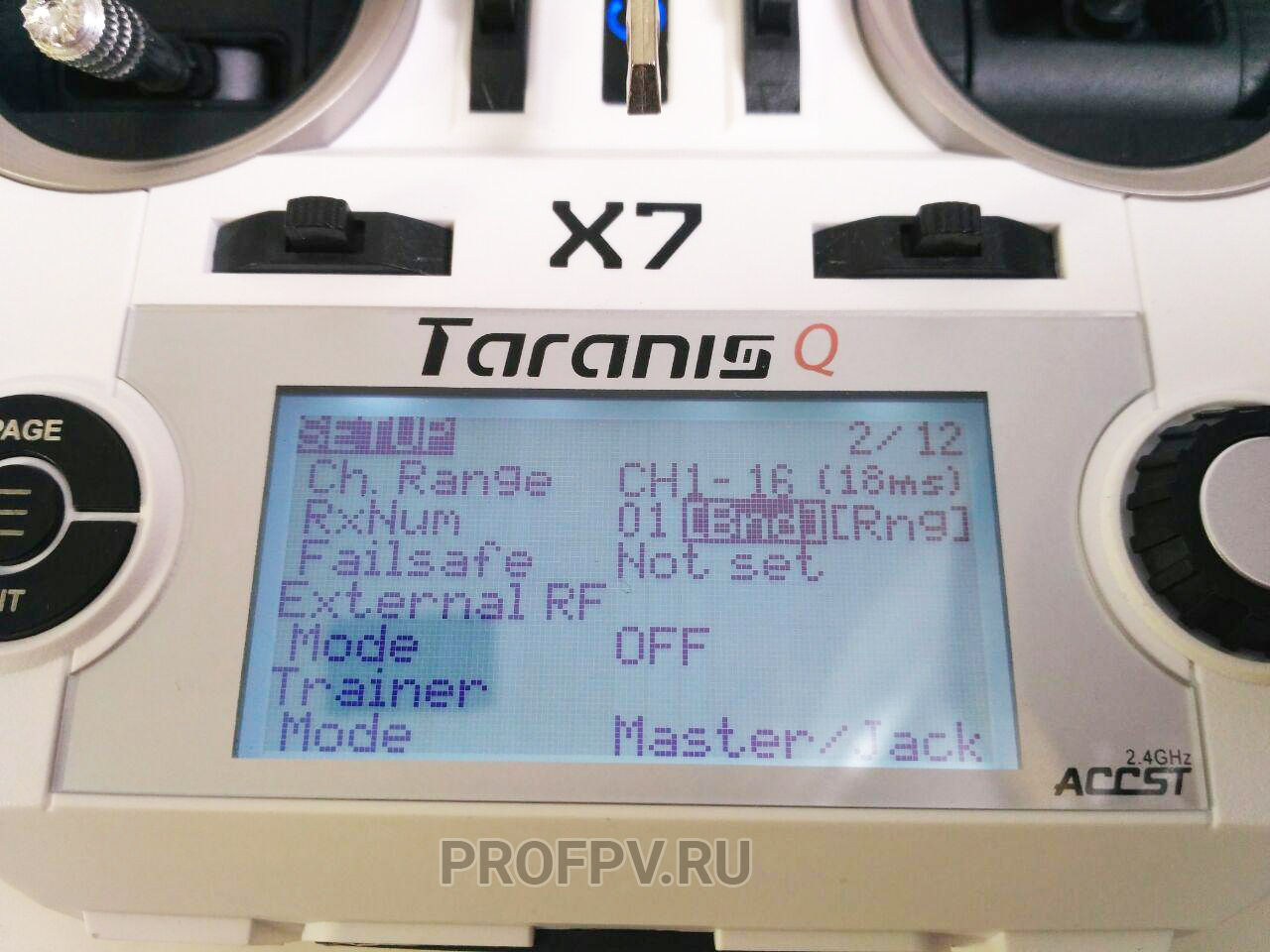
Нажимаем кнопку на приемнике, она находится сверху слева и подключаем полетный контроллер по USB к компьютеру, чтобы подать питание на приемник. Загорится зеленый светодиод, а красный будет моргать. Теперь отпускаем кнопку и снова нажимаем на аппаратуре колесиком на BND, чтобы выйти из режима привязки.
Все, вы успешно привязал приемник.
Надеваем термоусадку, усаживаем ее и заталкиваем приемник под полетный контроллер. Снаружи оставляем антенны. Мы их прикрепим к лучам рамы. Обязательное условие хорошего сигнала: антенны (если их 2), должны составлять угол 90 градусов между собой.
Чтобы у нас все получилось, берем 2 пластиковые стяжки и крепим их таким образом на лучи рамы:

Отрезаем по размеру термоусадку и надеваем. Затем усаживаем зажигалкой или феном:


Получится вот такое:

Таким образом, у вас получится идеальный угол в 90 градусов, а сами антенны прочно закреплены.
Установка видеопередатчика и пищалки
Сборка FPV квадрокоптера не обойдется без видео. Видеопередатчик используется классический: Echine TX528 и мы подключаем его к полетному контроллеру. Если провода у видеопередатчика длинные, то укорачиваем их до той длины, чтобы можно было прикрепить видеопередатчик к краю верхней планки рамы и провода не висели. Чтобы минимизировать помехи в видео, провода скручиваем в жгут. По схеме, мы можем припаиваться к этим контактам:

Пищалку припаиваем рядом с контактами на камеру. Пищалка нужна для звукового сопровождения различных уведомлений, а также для поиска упавшего квадрокоптера. В общем, это необходимая вещь. Пищалки нужны с встроенным генератором. Провода (черный и красный) припаиваем сюда:
Провода пищалки также просовываем под полетным контроллером. На выходе с задней стороны, привязываем пищалку и кабель питания пластиковой стяжкой к раме.
Видеопередатчик крепим пластиковыми стяжками к верхней панели, попутно прикрутив антенну:
Монтаж Caddx Tarsier 4K в стэк, в башню
Пошаговая сборка квадрокоптера своими руками включает самое интересно — монтаж платы камеры в стэк к полетному контроллеру и регуляторам оборотов, а также монтаж модуля камеры на распечатанные на 3D принтере переходники.
Начнем с переходников. Вставляем в них маленькие гайки М2:
Прикручиваем эти переходники к камере винтами подходящего размера на 6 или 8 мм, чтобы все держалось крепко:

Берем боковые панельки, на которые будем закреплять камеру. Берем сверло на 2, примеряем (чтобы камера была по середине) и сверлим по 2 отверстия для крепления переходников, но мне хватило 1 отверстия, так как второе попало ровно в готовое отверстие (решетка):
Теперь переходим к креплению самой платы на башню. Так как плата камеры имеет размер 29 * 29 мм, а монтажные отверстия 20 * 20 мм, то естественно просто так ее не установить. Поэтому, было решено взять информационную панельку от Mamba F405, просверлить сверлом на 2 мм 4 отверстия, закрепить плату и все то дело установить на стандартные 30 * 30 мм. Винты нужны будут также М2 на 12 мм из набора.
Металлическая панелька с синей резиной — это радиатор платы камеры.
Нужно сместить все в одну сторону, иначе потом не закрутите гайками саму панель.
В итоге, получилась вот такая композиция:
Гайки влезут только с одной стороны, но держаться будет все крепко, проверенно неоднократными полетами и падениями на этом дроне. Не забудьте подложить резиновые колечки из набора полетного контроллера (их там много).
Остается смонтировать панельки к переходникам камеры. Откручиваем камеру от переходников, прикручиваем переходники к панелькам и снова закручиваем камеру к переходникам. Устанавливаем на место:


Крепим верхнюю панель к раме:
Последние штрихи
Аккумулятор в этой сборке квадрокоптера будет крепиться сверху. Так как там шляпки винтов, то нам необходимо сгладить эту поверхность. Для этих целей был выбран кусок резины (камера от велосипеда) и 2 полоски двустороннего скотча:

В сборке FPV квадрокоптера можно применить любой материал, помните, этот квадрокоптер собираете вы сами и так, как вы хотите, поэтому используйте фантазию, не обязательно следовать тому, как показано здесь.
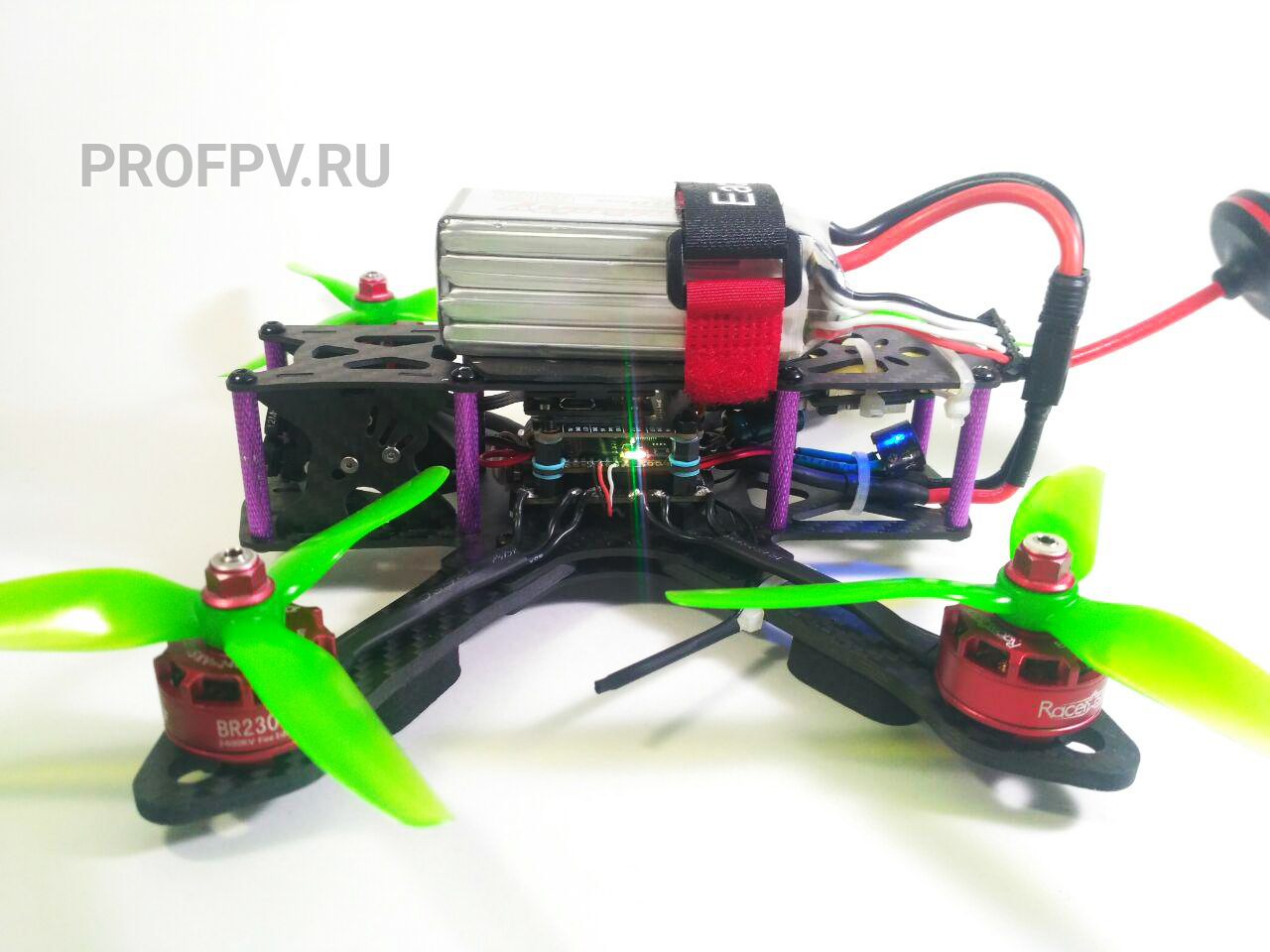
Итоговый вид квадрокоптера:
На этом с технической частью закончено и пора переходить к программной: прошивка и настройка!
Прошивка и настройка квадрокоптера после сборки своими руками
После сборки квадрокоптера, переходим к настройке и прошивке квадрокоптера. Вам понадобится:
- Betaflight Configurator;
- BLHeliSuite;
- Кабель USB — microUSB.
Скачать Betaflight Configurator и BLHeliSuite можно на этой странице: Как и где скачать Betaflight Configurator и BLHeli
Если при подключении квадрокоптера к компьютеру он не видит полетный контроллер, то вам нужно сделать следующее:
- Качаем по ссылке https://www.st.com/en/development-tools/stsw-stm32102.html STM32 Virtual COM Port Driver — там нужно согласиться на использование драйвера и ввести свою почту, на которую придет ссылка для скачивания. Без этого драйвера вы не подключитесь ни к одному конфигуратору. Устанавливаем драйвер. Откройте файл Readme в архиве — там написано в разделе «How to use», чтобывы зашли в директорию установки и запустили файл dpinst_x86.exe или dpinst_amd64.exe.
- Если это не помогло и вы намудрили с драйверами, попробуйте поставить прошлую версию драйвера. Более подробно в статье:
Taranis не определяется в симуляторе, настройки USB и JOYSTICK
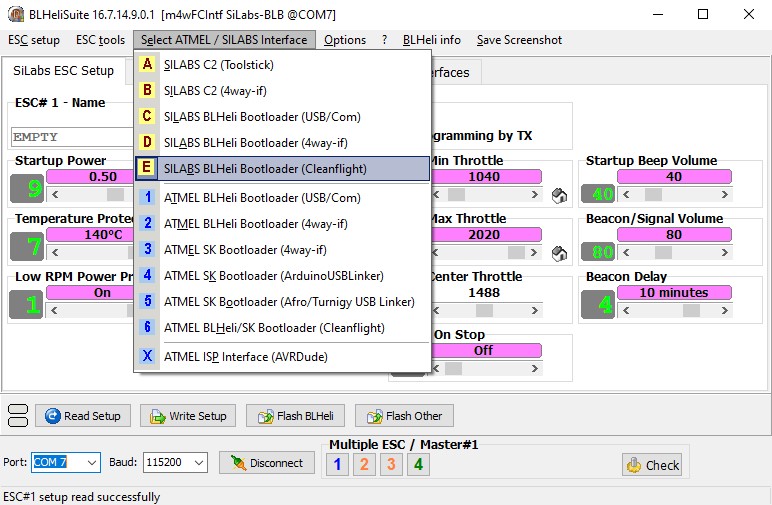
Прошивка регуляторов оборотов в BLHeliSuite
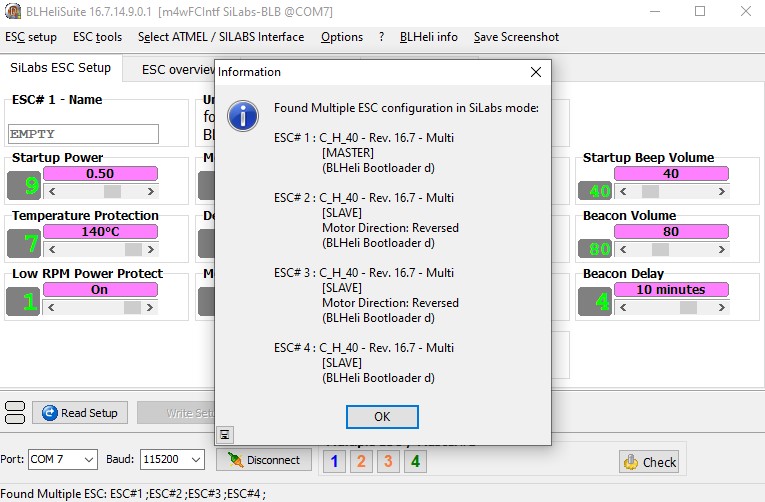
Сначала нам нужно открыть BLHeliSuite и прошить регуляторы оборотов. На нужна версия без 32 и на момент опубликования, она называлась BLHeliSuite16714901.
Запускаем и открываем. Сверху выбираем для Cleanflight:
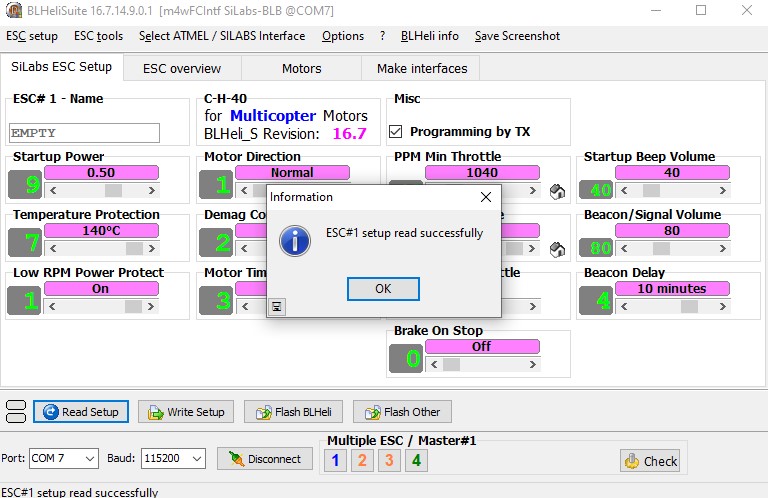
Внизу выбираем нужный порт (чтобы узнать какой, подсоедините USB к полетному контроллеру и посмотрите, какой порт появился в списке. Это же можно посмотреть и в диспетчере устройств) и нажимаем Read Setup, чтобы прочитать настройки.
Не забудьте снять пропеллеры!
Программа скажет, что настройки прочитаны успешно:
Нажимаем Flash BLHeli:
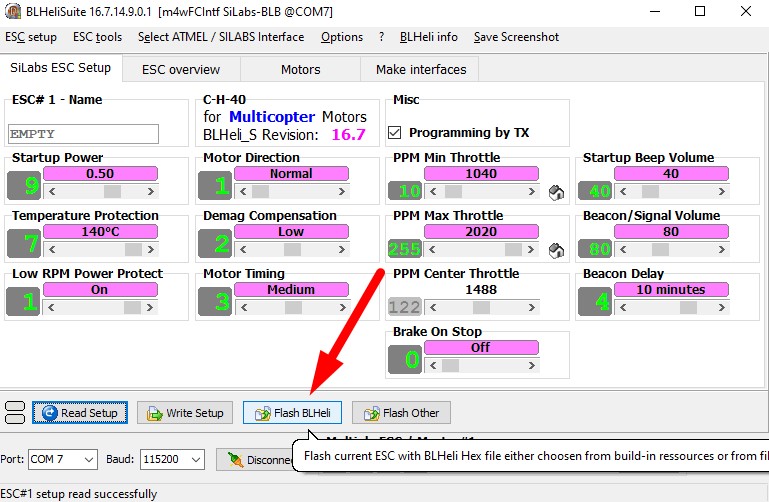
Далее вам система предложит выбрать версию прошивки и прочие схемы, везде соглашаемся и ничего не меняем:
В конце программа предложит прошить второй регулятор оборотов. Делаем все тоже самое, так как их 4 штуки:
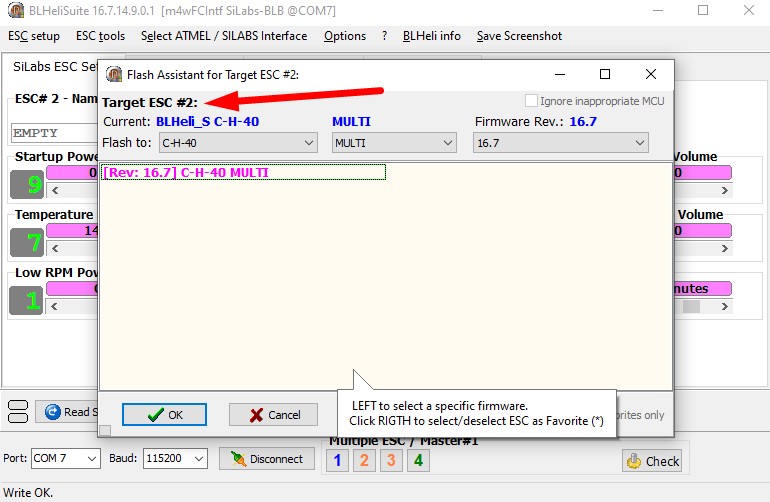
В конце программа сообщит, что все 4 регулятора оборотов прошиты:
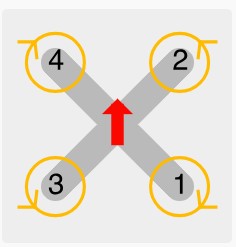
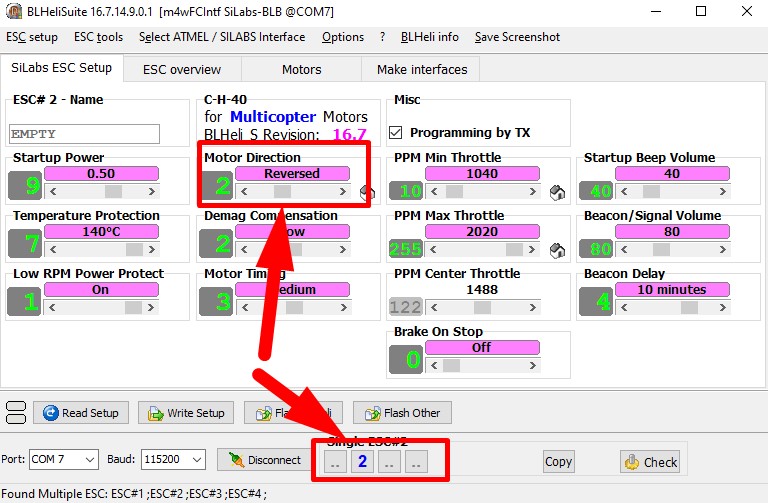
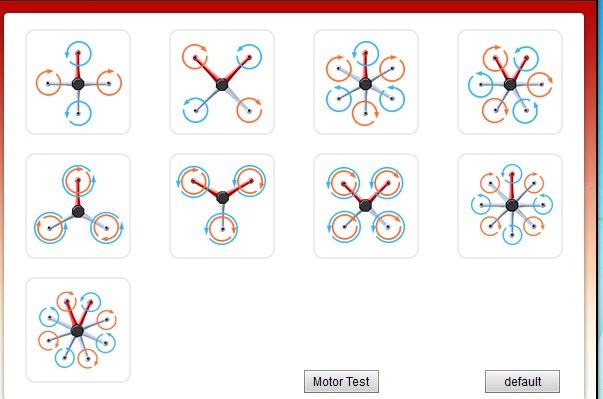
В этой же программе можно будет менять направление вращения моторов, это нужно, чтобы квадрокоптер смог летать. Вращаться они должны по такой схеме:
В этой программе вы также сможете настраивать музыку, которая звучит при включении и сочинять свою. Программа для тонкой настройки регуляторов оборотов. Но если вам не хочется разбираться в настройках и просто нужно прошить регуляторы, то вам подойдет простое приложение — BLHeli Configurator.
Для простой прошивки регуляторов, читайте статью: Как прошить полетный контроллер и ESC BLhelli. Прошивка квадрокоптера
Здесь все гораздо проще и интуитивно понятно.
Прошиваем полетный контроллер в Betaflight Configurator
Зажимаем кнопки BOOT на полетном контроллере и подключаем к компьютеру через USB-кабель.
Открываем Betaflight и переходим на вкладку «Программатор» и выбираем цель и версию прошивки. Выбираем в первой строчке FURYF4OSD (DIAT) и самую последнюю (новую) версию прошивки. Остальное не трогаем. Потом нажимаем «Загрузить прошивку онлайн»:
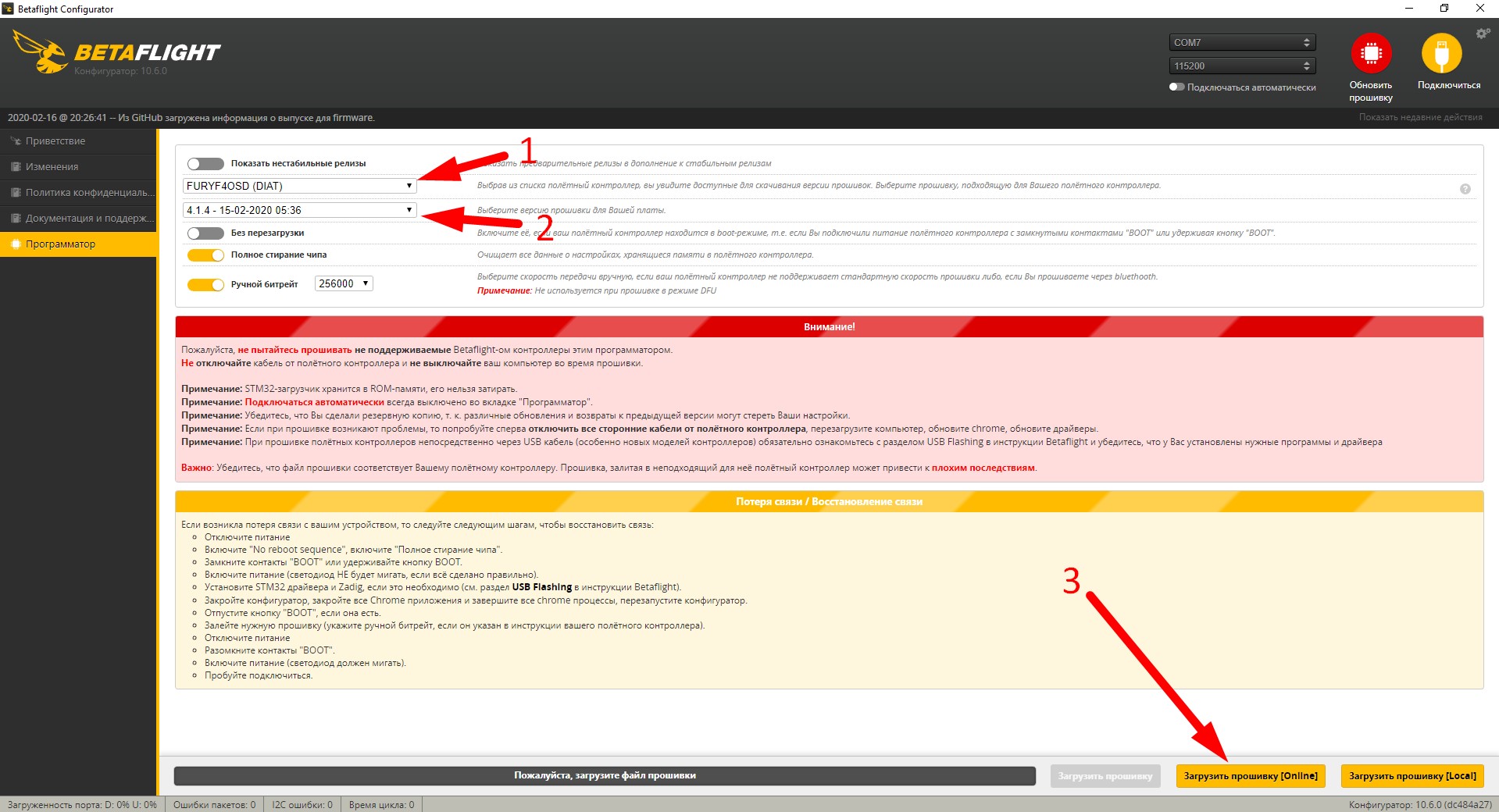
После того, как скачалась прошивка, жмем «Загрузить прошивку«:
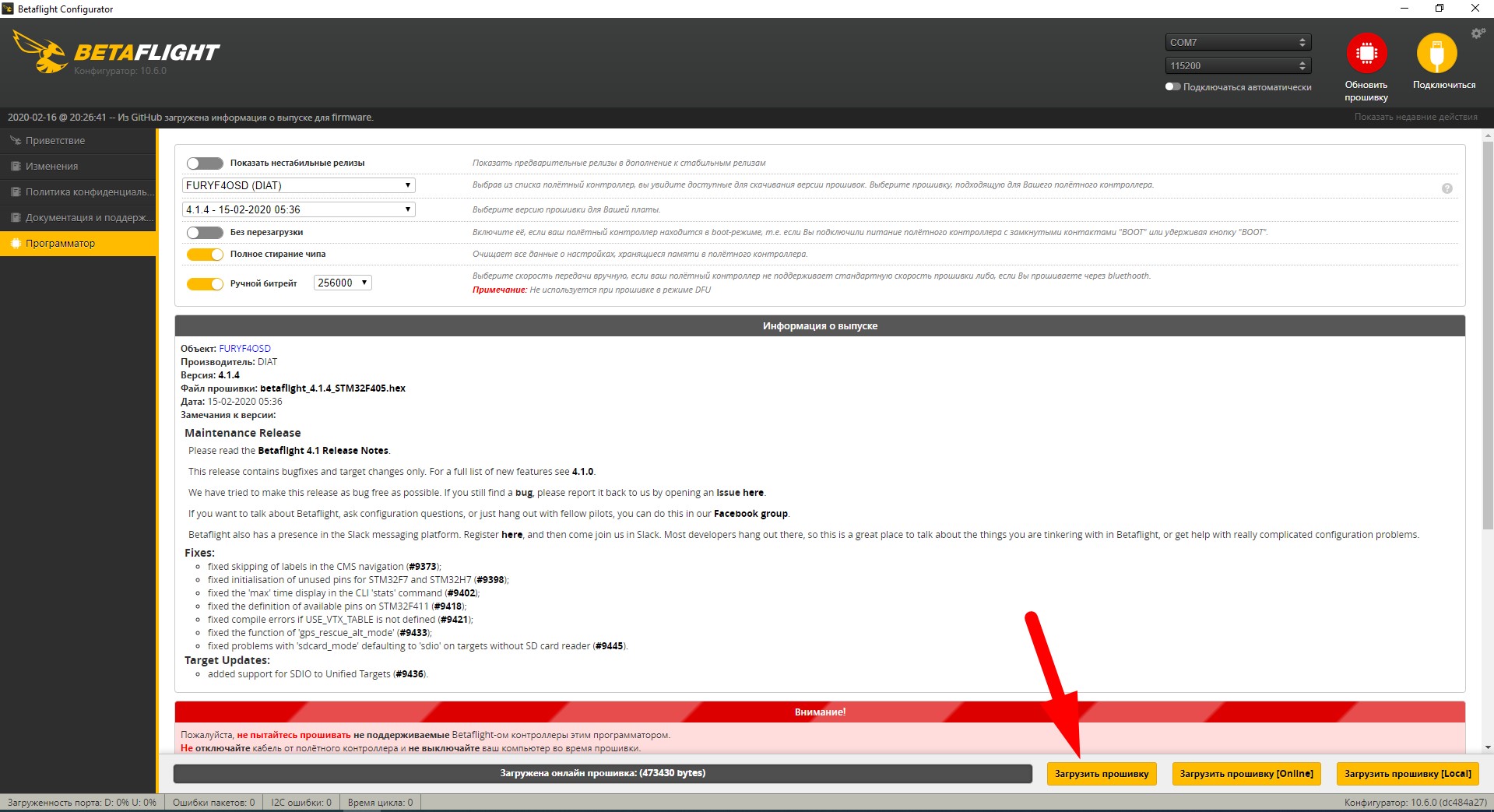
Начнется процесс прошивки, после окончания можно нажать кнопку «Подключиться» в верхнем правом углу.
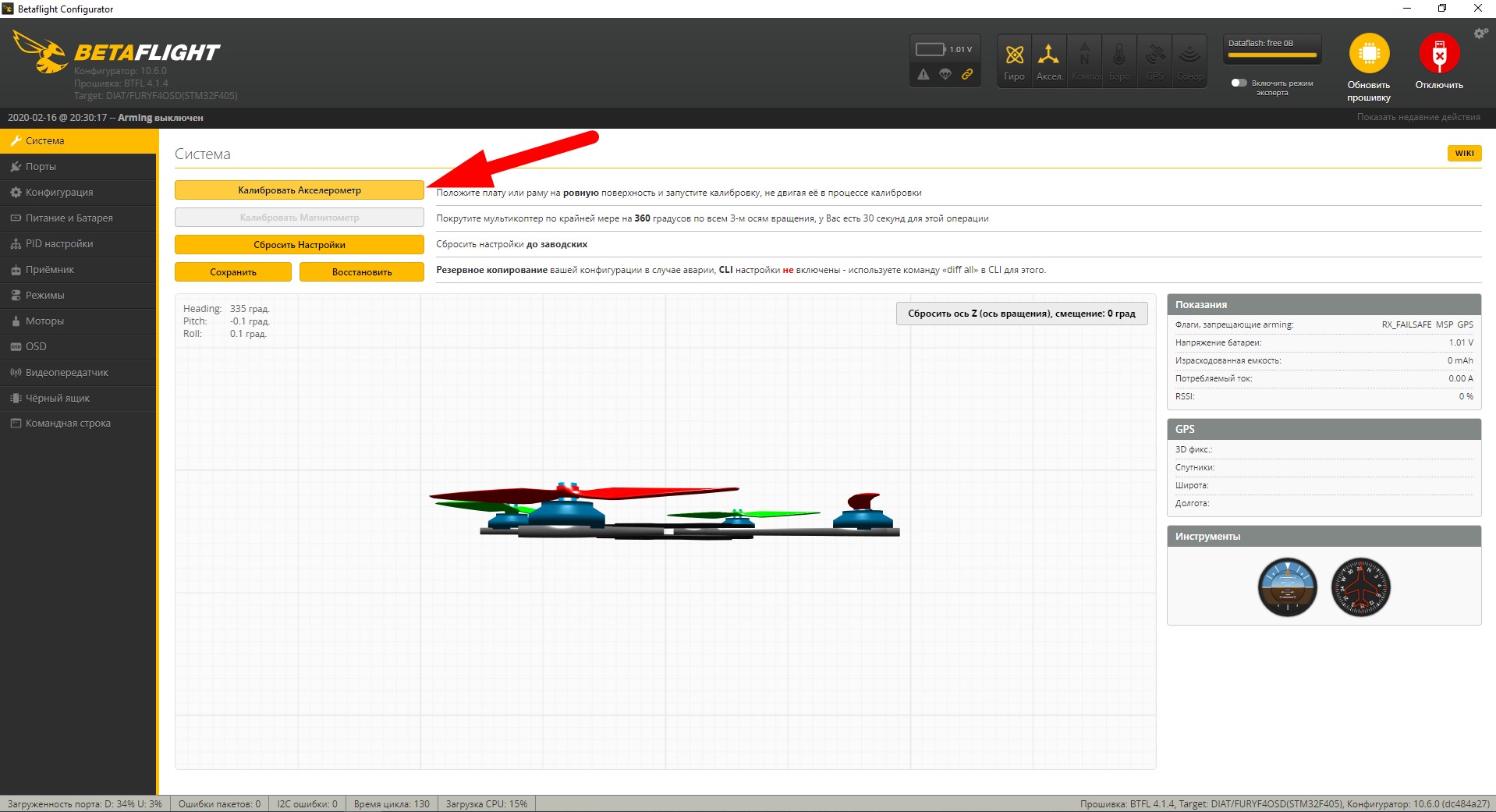
Вкладка Система
На главном экране калибруем акселерометр:
Вкладка Порты
На UART1 ставим Serial RX — это порт для приемника.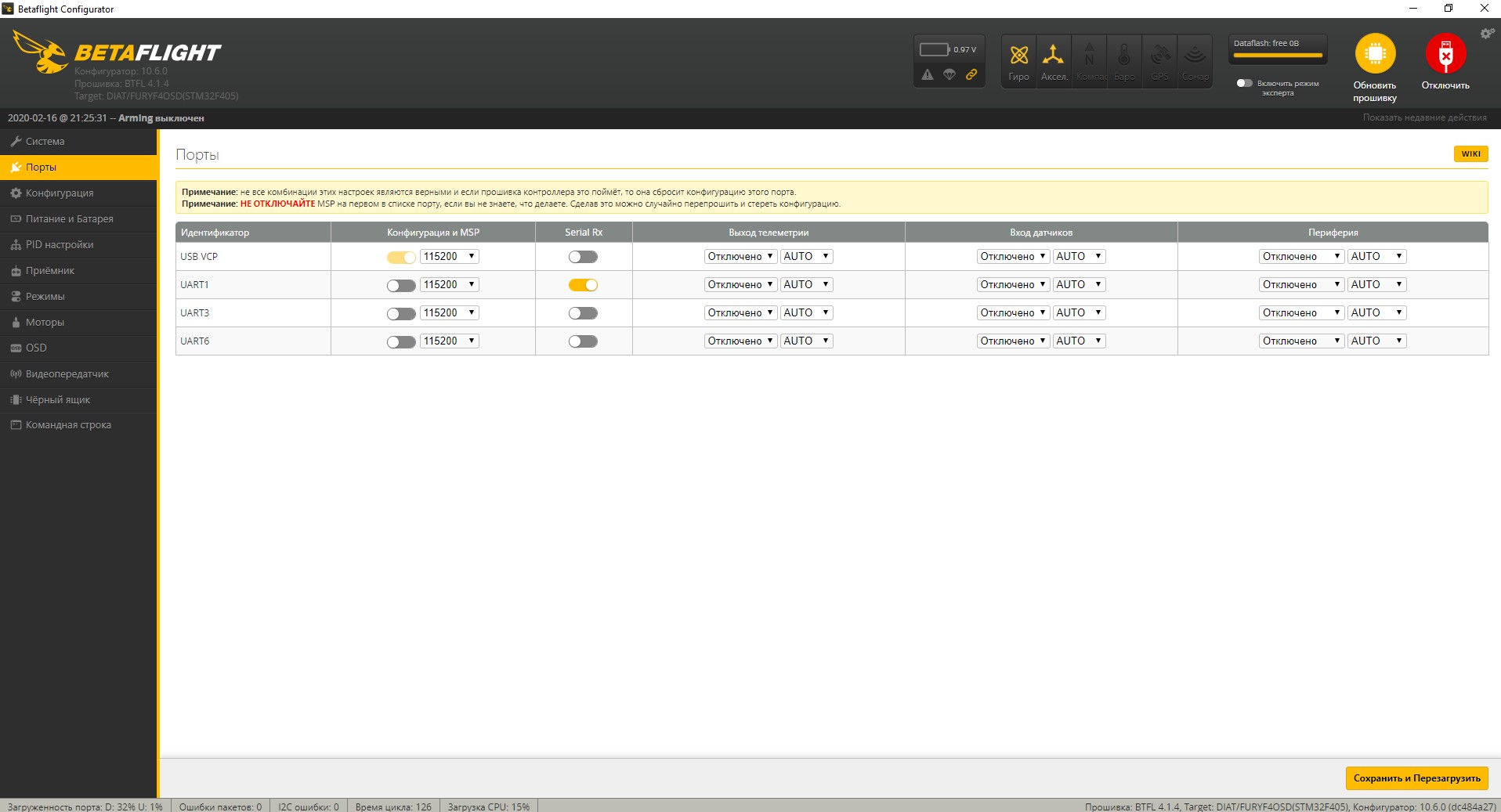
Жмем «Сохранить и перезагрузить«.
Вкладка Конфигурация
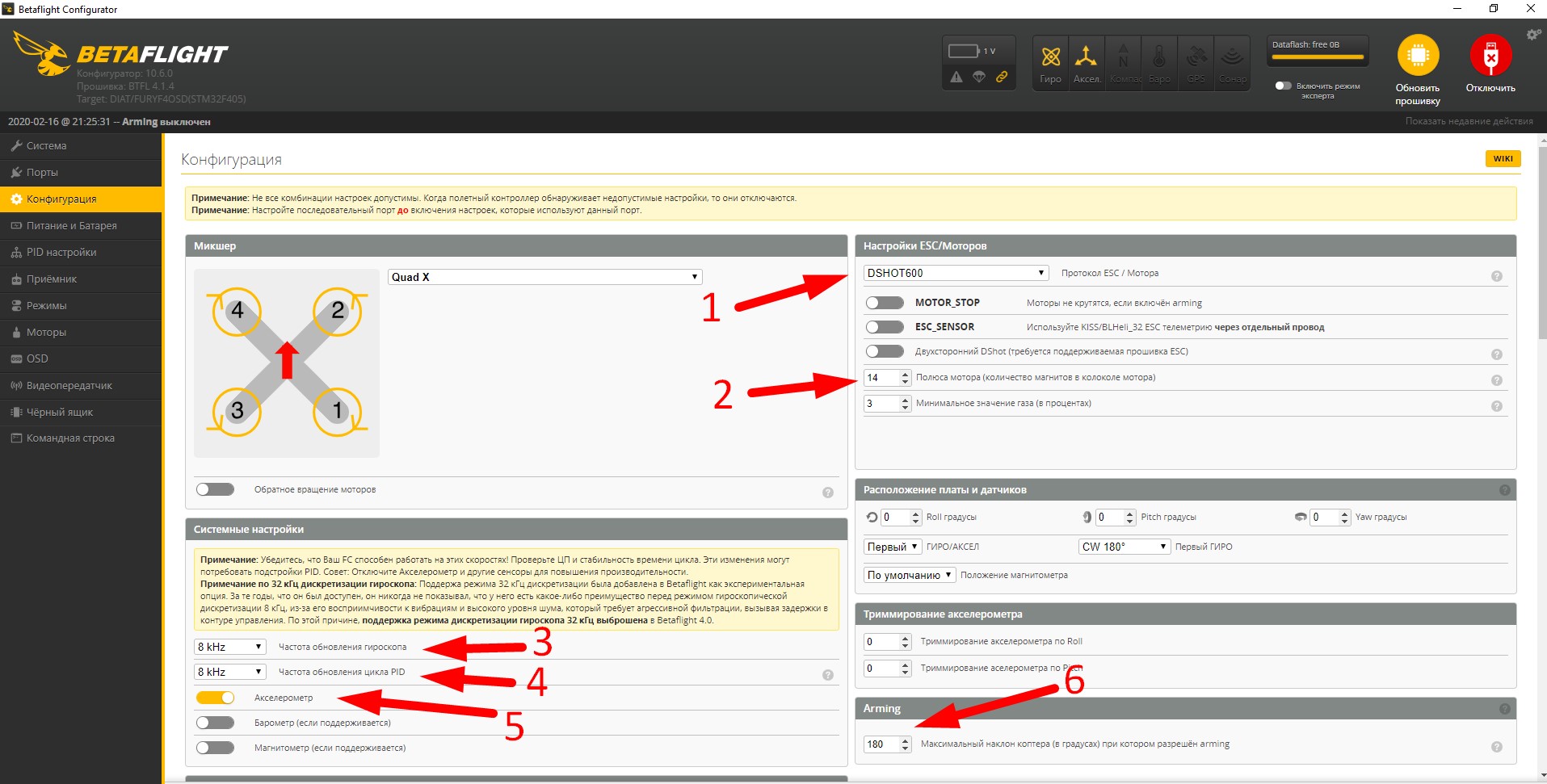
Что на изображениях:
- Протокол для общения Полетный контроллер — регуляторы оборотов: ставим DSHOT600;
- У моторов в сборке 14 магнитов в колоколе. Если вы используете другие двигатели, то считайте;
- Частота обновления гироскопа. Ставим 8kHz;
- Частота обновления ПИДов: ставим 8kHz;
- Включаем акселерометр;
- Максимальный наклон квадрокоптера. Ставим 180, тогда вы сможете заармить дрон почти в любом положении.
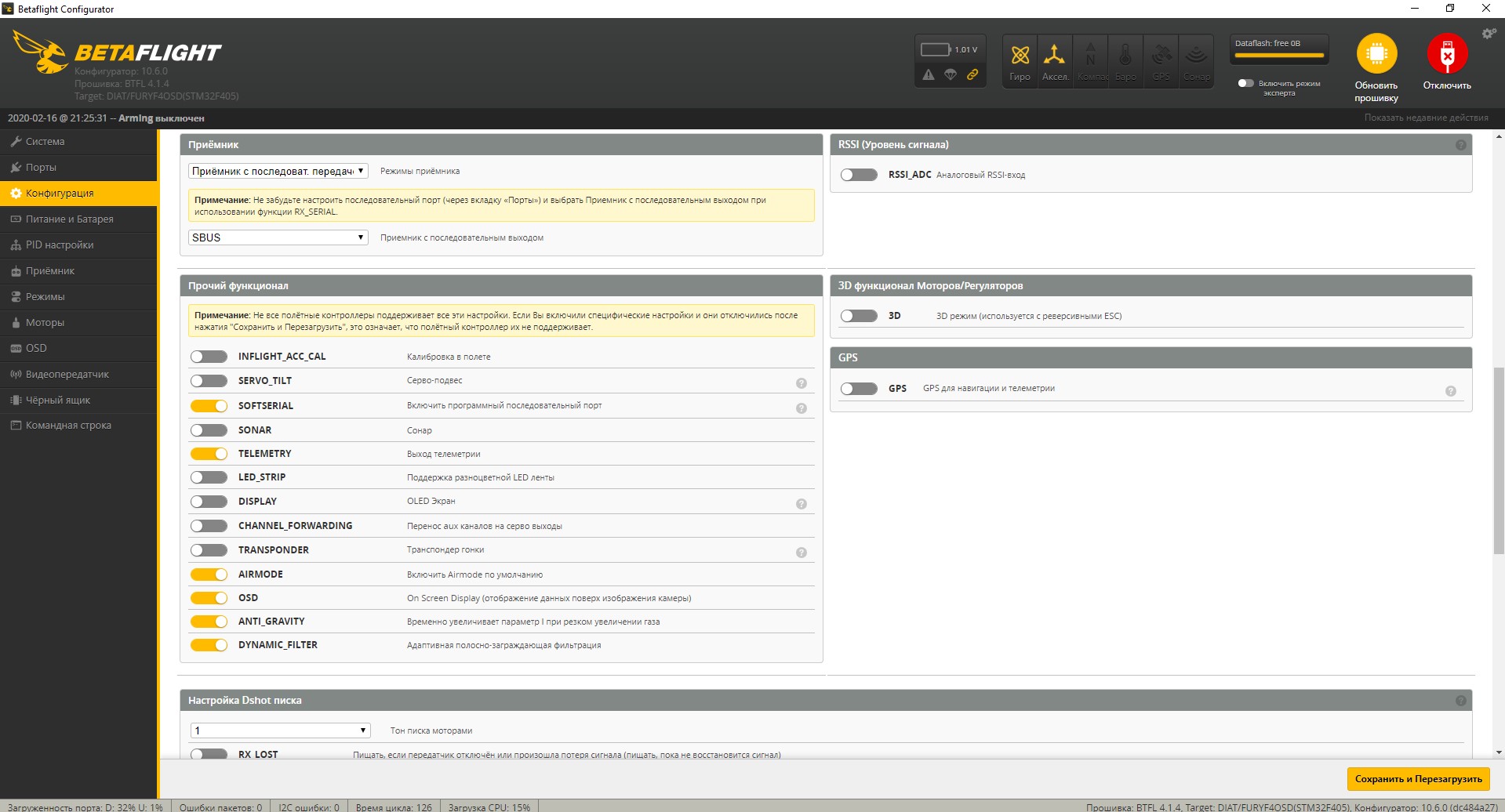
Блок «Приемник»: здесь выбираем строчку «Приемник с последовательной передачей данных«. Ниже выбираем «SBUS«, так как приемник у нас работает на этом протоколе.
Блок «Прочий функционал»: включаем строчки, как на скрине. Если планируете подключить адресную светодиодную ленту, то включаем и LED_STRIP. Остальное включается под индивидуальные задачи и сейчас их включать не требуется.
Жмем «Сохранить и перезагрузить«.
Вкладка Питание и батарея
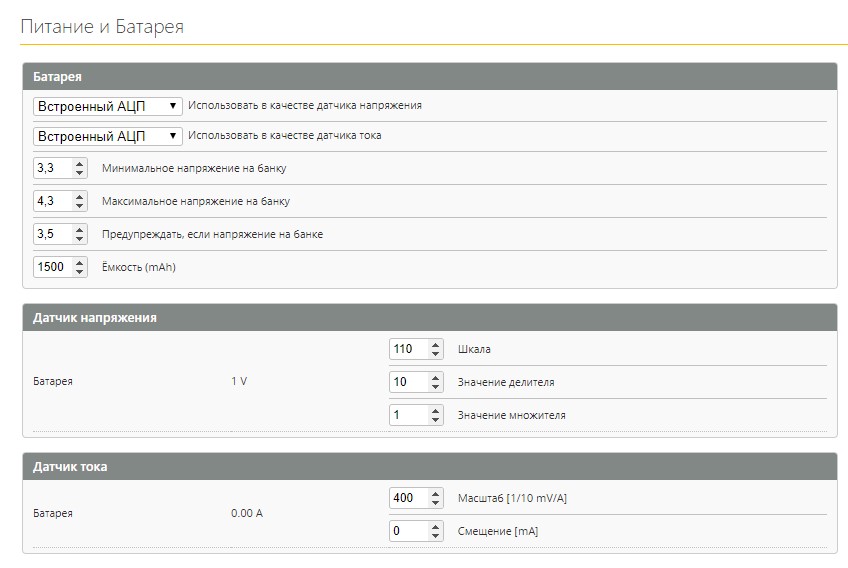
Здесь все стандартно — просто настраиваем характеристики ваших аккумуляторов.
Жмем «Сохранить и перезагрузить«.
Вкладка Приемник
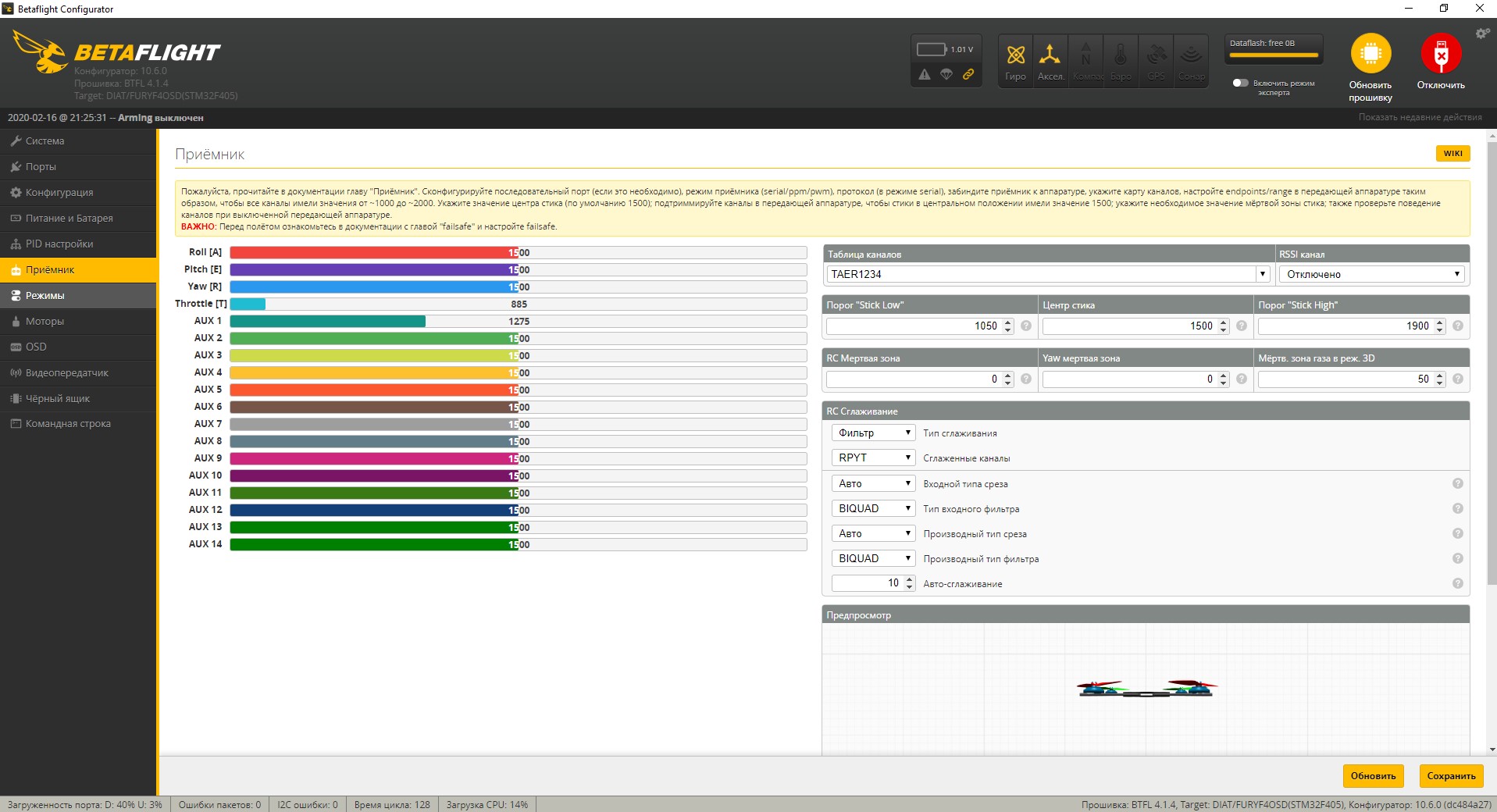
Таблица каналов выбирается и прописывается исходя из таблицы каналов вашей аппаратуры. Данный дрон управляется с помощью аппаратуры управления Taranis QX7 и у него по умолчанию таблица TAER1234. Ее можно менять непосредственно в самой аппаратуре.
Читайте также: Обзор FrSky Taranis QX7
Для проверки, что все работает: подключаем аккумулятор и аппаратуру управления. Двигаем всеми стиками и тумблерами в разные стороны. Разноцветные полоски должны реагировать на каждое движение элементов пульта.
Если вы используете аппаратуру Taranis, то скорее всего у вас тут не будут реагировать тумблеры. Для этого нужно зайти в меню, дойти до MIXER и назначить каналу тумблер. Подробнее, как это сделать на видео ниже:
После этого, у вас начнет отображаться 5 канал в Betaflight и будет реагировать на переключения.
Вкладка Режимы
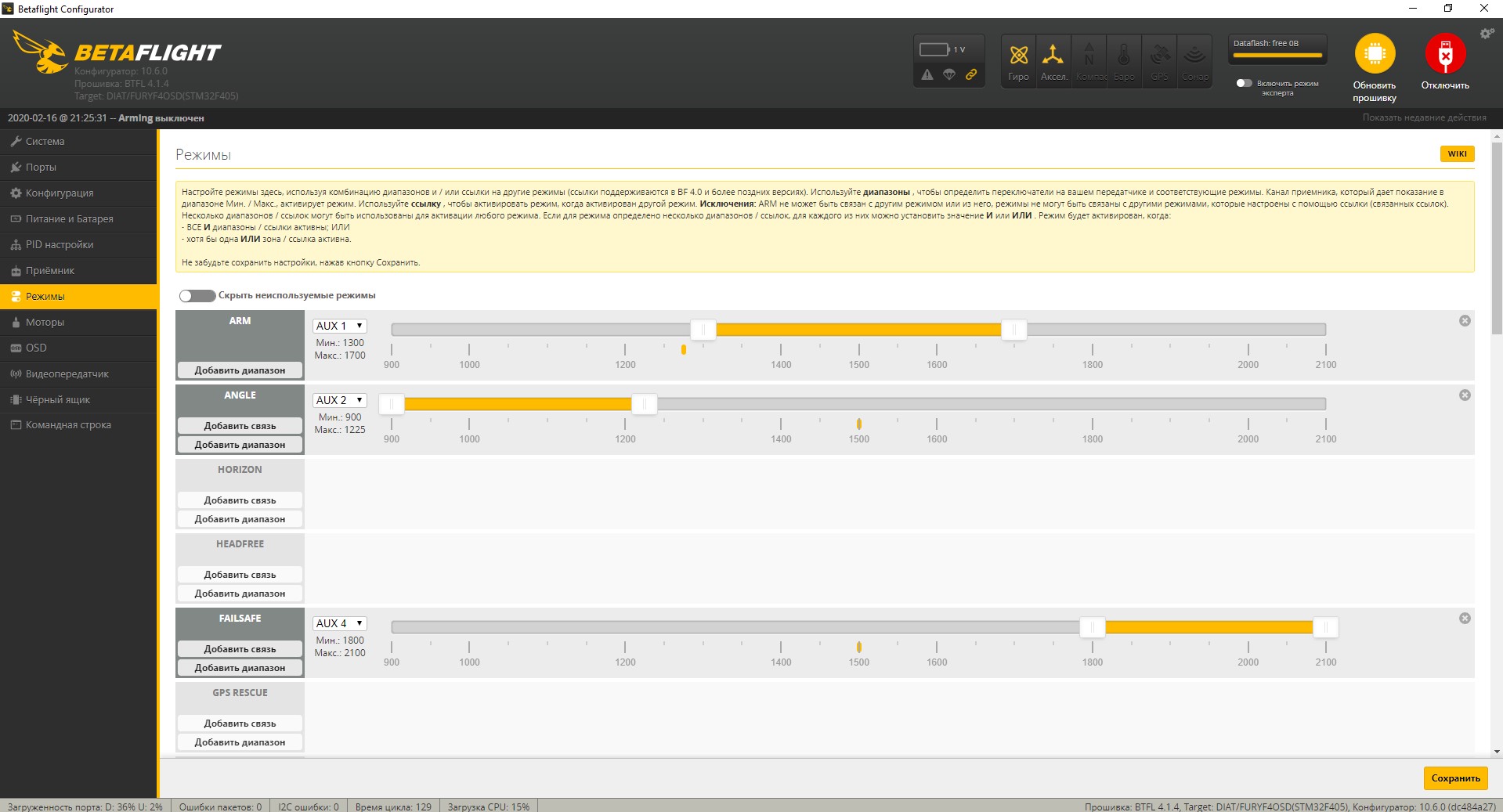
Здесь настраиваются тумблеры на ваше усмотрение. Например, заармить дрон настроено на тумблер 1, а режимы (стабилизация и АКРО) на 2 тумблер. Таким образом, когда включается тумблер 1, сразу включается режим стабилизации:

Жмем «Сохранить«.
Вкладка Моторы
Здесь нам нужно проверить направление моторов. Переключаем тумблер 1 и по очереди поднимаем ползунок каждого двигателя, перед этим подключив аккумулятор и обязательно сняв пропеллеры. Если все хорошо и каждый мотор крутится в свою сторону (как показано на схеме выше), то приступаем к калибровке, если нет, то заходим в BLHeli и меняем направление на Reversed.
При использовании протоколов DSHOT, калибровку делать нет необходимости. Но если вы используете, например, Multishot, то калибровка нужна.
Калибровка:
- Переключаем тумблер 1;
- Отключаем аккумулятор;
- Поднимаем ползунок 2 на самый верх;
- Подключаем аккумулятор — регуляторы пропищат;
- Резко переводим ползунок в нижнее положение — регуляторы снова пропищат;
- Переподключаем аккумулятор.
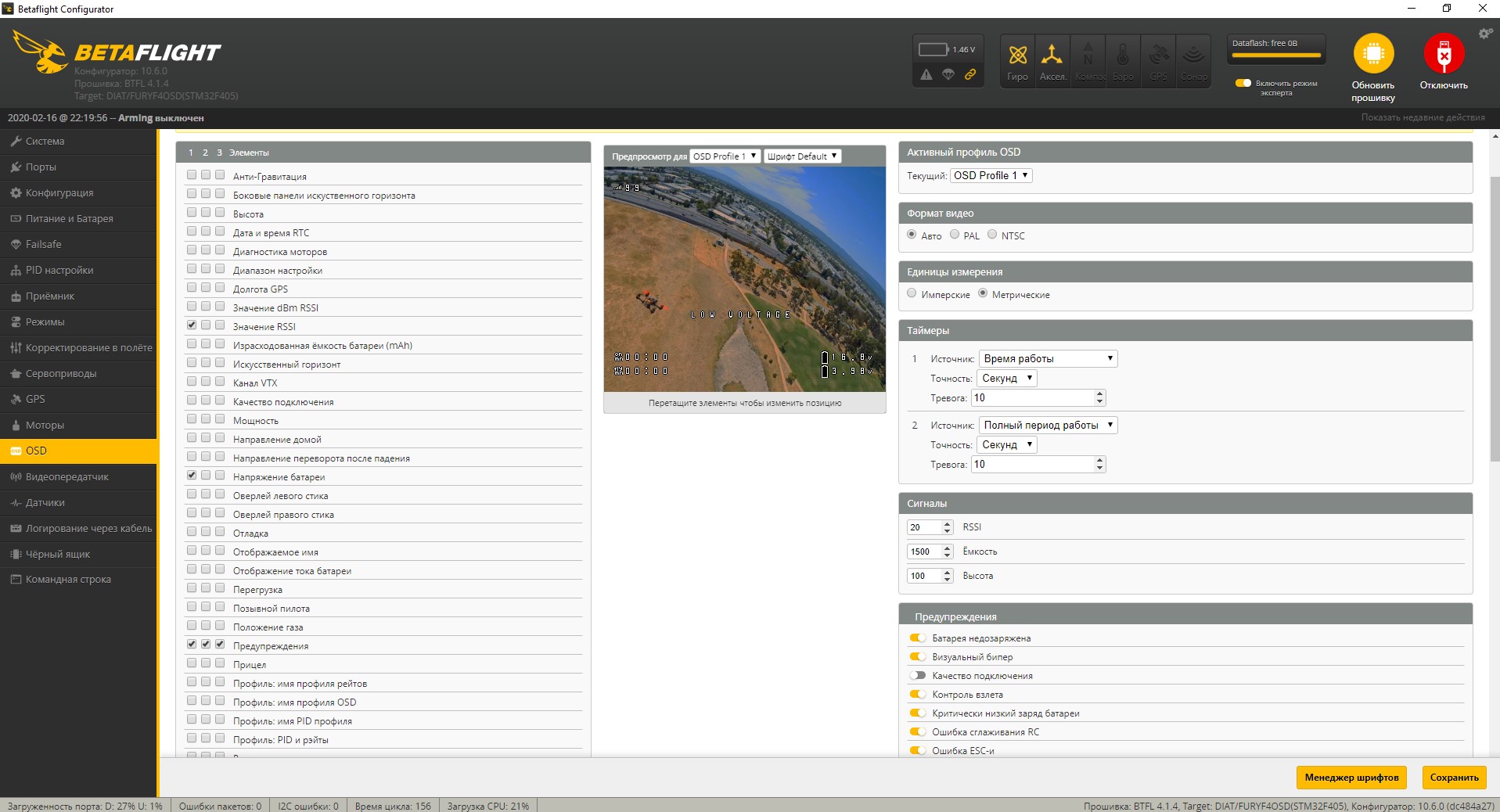
Вкладка OSD
Для этой сборки настроены такие параметры OSD, но вы можете устанавливать любые:
Вкладка Командная строка (CLI)
Здесь сохраняем все наши настройки командой DUMP:
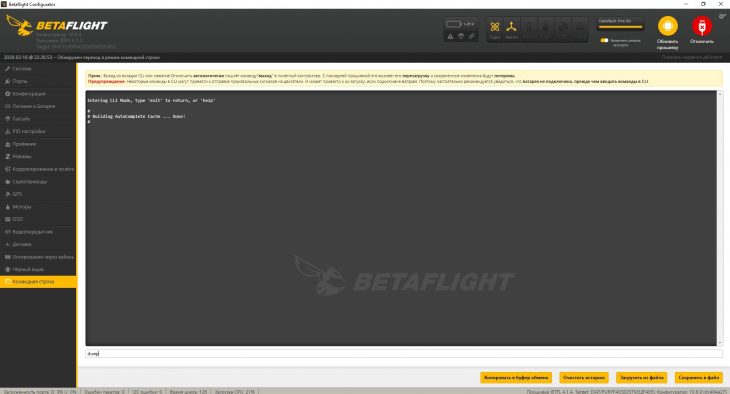
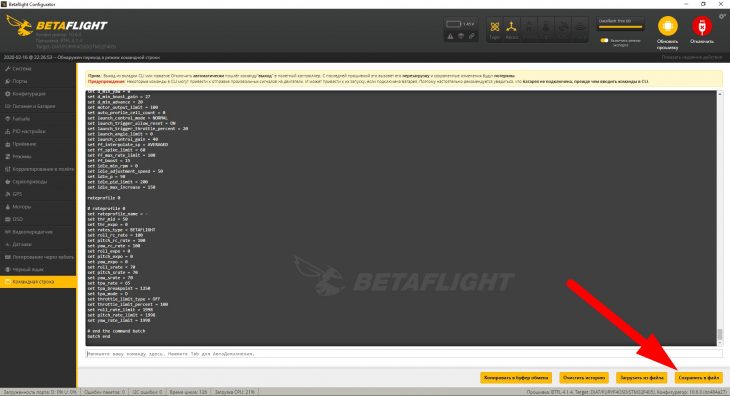
И сохраняем в файл.
Подробнее о командной строке: CLI: командная строка Betaflight — как сделать бекап и посмотреть настройки, а также команды
Вот и все, ваш квадрокоптер готов к полету!
Фотографии
Таблица компонентов и примерная цена
Дешевле и проще заказать компоненты на Banggood. Все пришло быстро и в срок, без брака.
| Компонент | Название | Ссылка | Цена ~ |
| Рама |
Martian 215 |
Banggood | Aliexpress | 21.83$ |
| Полетный контроллер с регуляторами оборотов 4 в 1 | MAMBA F405 MK2 | Banggood | Aliexpress | 42$ |
| Моторы |
Racerstar 2306 BR2306S Fire Edition 2400KV |
Banggood | Aliexpress | 38$/комплект |
| Пропеллеры |
HQProp 5045 |
Banggood | Aliexpress | 3$ |
| FPV камера |
Caddx Tarsier 4K |
Banggood | Aliexpress | 90$ |
| Антенна |
Foxeer 5.8G Lollipop (RP-SMA Male) |
Banggood | Aliexpress | 20$/2 шт. |
| Приемник | Frsky XM+ Plus Micro | Banggood | Aliexpress | 13$ |
| FPV шлем или очки | — | FPV шлем и FPV очки, что это и как работает | |
| Зарядное устройство | — | Как выбрать зарядное устройство LiPo для квадрокоптера? Советы и примеры | |
| Аккумуляторы | AHTECH Infinity 4S 85C (в карточке товара нужно выбрать Цвет: 1500mah 4S 85C) | Banggood | Aliexpress | 25$ |
| Видеопередатчик |
Eachine TS5828L (можно использовать любой другой) |
Banggood | Aliexpress
Альтернатива, с антенной SMA на Banggood и/или RP-SMA на Ali: |
7-8$ |
| Набор винтов и гаек | Здесь следует выбирать наборы М2! Другие не подойдут. | Banggood | Aliexpress | 7-10$ |
| Переходник с маленькой камеры, на большую |
Fixed Mount TPU |
Banggood | Aliexpress Ссылка на 3D-модель: ТЫК |
3$ |
| Аппаратура управления | — | Аппаратура управления квадрокоптером, какая бывает и как выбрать | |
| Паяльник | — | Banggood | Aliexpress | 6.53$ |
| Ключ для закручивания гаек пропеллеров | — | Banggood | Aliexpress | 3.89$ |
| Припой 63/37 | Kaina | Banggood | Aliexpress | 2.95$ |
| Оплетка для проводов | — | Aliexpress | 1.59$ |
| Пищалка | — | Banggood | Aliexpress | 3$/10 шт. |
| Термоусадка | — | Banggood | Aliexpress | 0.15$/1 метр |
Заключение

Сергей
Пилот как съемочного, так и гоночного квадрокоптеров
Задать вопрос
Такой квадрокоптер получился по итогу сборки. К нему планируется прикрутить еще и GPS для включения функции Возврат домой — такая функция появилась в последней версии Betaflight (Filesafe).
Главной целью сборки было, конечно же, прикрутить FPV камеру Caddx Tarsier 4K, ради которой все и затевалось.
Качество видео записывающей камеры отличное. Качество FPV камеры тоже на высоком уровне, также, удивило то, какая хорошая картинка в сумерки, будто с ночным зрением летаешь.
Видео с полетов будет позже.
Если у вас остались вопросы по сборке fpv квадрокоптера: задавайте, с радостью ответим!
Привет! Сегодня на повестке дня у нас очень интересная тема. Думаю, ты уже задумывался о том, что можно собрать квадрокоптер своими руками. Идея и правда интересная. Выбирая этот, не самый простой путь, ты не только получишь хороший дрон, но и сможешь понять его устройство, и получишь много полезных знаний. А часть этих знаний ты впитаешь уже сегодня. Поехали!
Варианты
Перед началом стоит вспомнить – а какие же есть способы получить свой квадрокоптер? На самом деле их пять.
RTF

RTF (ready to fly) – Просто купить готовый коптер. Тебе останется его просто достать из коробки и запустить в полёт. Это хороший вариант, если тебе не интересны эти конструкторы, и ты хочешь просто удовлетворить свою потребность в БПЛА. Однако, это далеко не так весело, как оставшиеся варианты.
Комплект «всё включено»
Такой комплект подойдёт тем, кто хочет сделать дрон своими руками, но не собирается часами разбираться в документациях, калькуляторах и прочих тонкостях. Там всё так-же рассчитано производителем и подогнано. Нужно только собрать и настроить. Если ты сейчас выбираешь свой первый квадрокоптер, то это определённо твой выбор.
Комплект ARF

ARF (Almost Ready to Fly) – Тут всё слегка сложнее. Бывают разные степени «готовности». Где-то нужно докупить контроллер, а где-то в комплекте идёт только рама коптера. Собрать квадрокоптер, настроить и откалибровать придётся самому. Вариант для тех, кто хочет углубиться в тему и поковыряться в своём БПЛА.
С нуля
Это выбор продвинутых юзеров. Строить коптер с нуля — значит самостоятельно подбирать оптимальные компоненты, разрабатывать и изготавливать раму и так далее. Это сложный, но очень интересный путь, особенно, если не брать готовый модуль управления, а попытаться использовать Arduino или raspberry pi.
Из подручных материалов

Мы не ищем лёгких путей. Дедушкин гараж, алиэкспресс и помойка электроники – наш выбор. Путь боли, ПВХ труб и хардкора, но в результате ты получишь полностью самодельный квадрокоптер. Тут полный простор для фантазии, а все необходимые комплектующие и чертежи квадрокоптеров можно найти в интернете.
Инструкция по сборке квадрокоптера своими руками (для начинающих)

А теперь давай разберёмся с тем, как собрать квадрокоптер мечты. Сразу скажу, что это обобщённый гайд, и некоторые моменты могут отличаться. Я попытаюсь систематизировать процесс, и указать на основные моменты выбора и сборки.
Детали для сборки квадрокоптера.
Сборка квадрокоптера своими руками начинается с выбора компонентов. Это самый ответственный этап.
Комплектующие рамы

Несущая конструкция коптера крайне важна. От её характеристик зависит то, сколько лишней мощности у вас останется. Чем легче рама, тем она дороже. На счёт прочности особо напрягаться не стоит, если в ваши планы не входит постройка квадрокоптера для массивных камер. Есть три основных типа рамы – четырёхлучевая, шестилучевая и восьмилучевая. В данном случае мы будем отталкиваться от четырёхлучевой компоновки с одинарными двигателями (один движок на луч).
Также рама может быть оснащена складными лучами, но это уже очень дорого, и не очень нужно. Можно попробовать реализовать это самостоятельно.
Особенности при выборе компонентов
Моторы

Моторы советую брать чуть помощнее, чем нужно. Во-первых, если ты берёшь их в Китае, то их характеристики будут завышены. Во-вторых, это даст тебе больше простора. К примеру, если нужно будет повесить камеру потяжелее, или какой-либо другой модуль, то это не повредит лётным характеристикам.
Пропеллеры
Это тема достаточно объёмная. При выборе винтов нужно ориентироваться на свои потребности. Если это будет простенький коптер для «полетать», то можно смело брать пластиковые. Если же вы хотите настоящий рабочий агрегат для аэрофотосъёмки, или спортивный мини дрон (что не парадоксально, ибо там каждый грамм на счету) то желательно использовать композитные материалы. Ну и не жадничай. Переплата в 10 процентов может избавить от необходимости балансировки.
Пульт и приёмник

Для начала, грамотным решением будет взять пульт, у которого в комплекте есть приёмник. Тогда они будут уже спарены, и тебе останется только присоединить приёмник к управляющей плате. Пульт тоже не бери бездумно. Обычно, приличные экземпляры с большим радиусом действия начинаются от 1 000 рублей. Многие имеют кучу функций, которыми пользоваться будет невозможно. К примеру переключатели режимов есть, а плата режимов полёта и не поддерживает. Из-за этого вес и объём занимают бесполезные переключатели.
Регуляторы оборотов
Они характеризуются по мощности, виткам мотора, внутреннему сопротивлению, наличию реверса, точности работы и куче других страшных параметров. Если есть возможность – ищи комплект двигателей с контроллерами. Если так ты не хочешь, то придётся курить форумы и документацию. В принципе, если согласовать допустимый тип моторов и выдаваемую мощность, то шанс промахнуться минимален, но я этого не говорил. Перепроверь.
Батарея

Необходимая батарея рассчитывается при помощи калькулятора. Он учитывает много параметров, включая вес самого батарейного блока. Дешёвки снова не советую брать. Горит красиво, но слишком быстро. Если коптер – грузовой, и оснащён мощными моторами и прочим навесным оборудованием с высоким потреблением энергии, то не забудь проверить, хватит ли мощности аккумуляторов.
Камера
Ух, вот это самая жесть. Камера не всегда нужна, но если она нужна, то нужно внимательно подойти к её выбору. В качестве записывающей камеры стоит использовать экшн камеры- GoPro или её Китайские аналоги (они не сильно уступают в качестве видео, если даже не превосходят «фирму»). Нужно ориентироваться на вес, и на угол обзора. С весом всё понятно, а вот про угол расскажу.

Хочется, чтобы камера снимала красоты мира, но не снимала лучи коптера. Если ты промахнулся и это произошло, то придётся выбрать из двух плохих вариантов.
Опустить камеру так, чтоб она не задевала пропеллеры. Опускать, скорее всего, придётся сильно, и это вызовет массу проблем с взлётом и посадкой, а также с маневренностью, из-за смещённого центра тяжести.
Вынести камеру вперёд. Тоже беда. Снова сместится центр тяжести (в этом случае можно попытаться уравновесить при помощи АКБ). Ещё сильнее утяжелит конструкцию, ибо придётся придумывать очень мощный фиксатор. Иначе никакими бюджетными виброгасителями делу не поможешь, и эффект желе обеспечен.
Можно попробовать использовать ориентировочную формулу L= 2 * tg(A /2) х D, где:
- L — Область обзора камеры на расстоянии D
- Α — Угол обзора камеры
- D – расстояние до объекта (в нашем случае, до пропеллеров)
Ты получишь диаметр круга, но так как камера снимает прямоугольное изображение, то этот диаметр будет диагональю. Там уж можно примерно прикинуть- задевает, или нет.
Компоненты выбираем, руководствуясь необходимым результатом. Не нужно брать самое лучшее, если в этом нет необходимости. Возможности своей сборки ты можешь приблизительно рассчитать при помощи калькулятора.
Китайские детали
Сразу говорю – в Китае брать можно, но стоит намного серьёзнее подойти к вопросу. Китайцы постоянно завышают характеристики. Так что, нужно примерно понимать, как и что работает, и не вестись на россказни Китайца о небывалых параметрах и чудесном качестве. Короче говоря – можно, но с пониманием дела и на свой страх и риск.
Контроллер
Контроллер, это мозг твоего мультикоптера. Их можно разделить на два вида.

Универсальный: Например, DJI NAZA. Такой контроллер можно использовать с абсолютно любой сборкой. Будь то квадрокоптер, гексакоптер или октокоптер. Он не заточен под управление чем-то конкретным. На него можно подвесить кучу оборудования, он обладает многими функциями и датчиками.
Есть и минусы. Первый минус, это цена. Тот же DJI Naza-M V2 стоит 17 000 рублей. Второй минус- необходимость настройки. Для этого используется специальная программа, написанная под конкретный контроллер. Там можно заменить и отрегулировать практически всё, но это требует определённых сил, знаний и времени.
Специализированный: Как в последующем примере. Он уже заточен под работу с конкретной компоновкой коптера. Конечно, он даёт некоторый простор, но мощность на каждом двигателе вы не настроите. Стоит недорого, умеет мало. Самое то, для начала.
Пошаговая инструкция по сборке
Давайте условимся на том, что ты прочитал нашу статью про выбор набора для сборки квадрокоптера ,и воспользовался ценнейшем советом – брать раму с платой распределения. Если нет, то провода подключаем сразу к модулю управления.

Для примера рассмотрим сборку из следующих комплектующих:
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки
- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления квадрокоптером KK2.1.5 kk21evo
- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Устройство для зарядки аккумуляторов Hobby King Variable6S 50W 5A
- Коннектор для подключения аккумулятора XT60 Male Plug 12AWG 10cm With Wire
- Коннекторы 20 Pairs 3.5mm Bullet Connector Banana Plug For RC Battery / Motor
- Пульт управления квадрокоптером Spektrum DX6 V2 with AR610 Receiver (в комплекте с приёмником и передатчиком)
Примерная цена- 20 000 рублей
Размазываем компоненты по столу ровным слоем, и начинаем.
Этап первый. Сборка

- Примерно прикидываешь необходимую длину проводов контроллера, прибавляешь небольшой запас «на криворукость» и обрезаешь их до нужной длины
- Припаиваешь коннекторы к выходам регуляторов, чтобы потом проще было подключать моторы
- Припаиваешь регуляторы к плате разводки
- Припаиваешь коннектор аккумуляторного блока к плате разводки
- Прикручиваешь двигатели на лучи коптера. При установке моторов постарайся не сорвать резьбу
- Если коннекторов на двигателях нет, то припаиваешь и их
- Привинчиваешь лучи с двигателями к плате
- Крепишь регуляторы к лучам дрона. Не важно чем, но удобнее всего пластиковыми хомутами
- Подключаем провода регуляторов к двигателям в произвольном порядке. Если будет нужно – потом изменим
- Закрепляешь на корпусе модуль управления (предварительно сфотографировав тыльную часть. Пригодится). Снова хоть на жвачку, но советую пока использовать мягкий двухсторонний скотч
- Подключаешь регуляторы оборотов к контроллеру. В те порты, которые отмечены (+ — пусто), обычно подключается белым проводом к экрану
- Остатками скотча закрепляешь приёмник как можно ближе к блоку управления, и подключаешь нужные каналы к нужным портам. Используй документацию своего приёмника и фото тыльной стороны платы, чтобы разобраться какая пачка проводов за что отвечает
- Подключишь питание устройства от батареи, через коннектор
- Profit! Ты собрал свой квадрокоптер
Этап второй. Отладка

- Запускаешь двигатели (тут обычно всё по-разному, так что снова смотри документацию)
- Немного прибавляешь газ, и смотришь в какую сторону вращаются пропеллеры. Они должны вращаться так, как указано в схеме, которая прилагается к контроллеру. Иначе управление будет инвертироваться. Если что-то не так, то просто переворачиваешь коннектор, который соединяет двигатель и контроллер
- Когда всё вращается правильно – прикручиваешь верхнюю деталь рамы. Не заталкивай её на своё место. Если она встаёт туго, значит что-то пошло не так. Ослабь нижние винтики, а после установки затяни всё равномерно
- Закрепляешь блок с аккумуляторами
- Монтируешь адаптеры для пропеллеров на моторы
- Устанавливаешь пропеллеры, учитывая направление вращения моторов. Приподнятая часть лопасти должна смотреть в направлении вращения
- Готово.Твой коптер готов пережить первое включение!
Это был один из простейших примеров, с которого стоит начать. Конечно, если ты хочешь использовать камеру, GPS или более сложный контроллер, то конструкция будет сложнее. Поэтому, если вы не уверены в своих силах, то стоит начать с малого. Всё остальное можно прикрутить потом.
Однако, не стоит переоценивать сложность самоделки. Если нет цели собрать мультикоптер из ПВХ труб на базе ардуино (а такое тоже бывает), то в этом нет ничего, что не смог бы рядовой пользователь. Главное не теряться, читать и спрашивать, если что-то не понятно.
Заключение
Напоследок хочется внести в этот текст немного морали. Любое подобное занятие, будь то проектирование, или просто сборка – является мощнейшим образовательным инструментом. Главное, это просто начать. Ты начнёшь понимать многие тонкости, и научишься концентрировать внимание на важных моментах. Это относится не только к сборке коптеров.
Тебе придётся научиться искать информацию, гуглить, и разбираться в массе вещей. Они тебе не пригодятся в жизни, но ими ты не слабо прокачаешь интеллект. Дерзай, учись, развивайся, и не бойся экспериментировать!
Кстати, расскажи в комментах о том, что ты думаешь об этой теме. Также можешь подписаться на наши группы (кнопки внизу). Тебе не сложно — мне приятно. Удачи, пилот, и да прибудет с тобой подъёмная сила.
![]() Загрузка…
Загрузка…
Мечта полета преследует каждого человека с детства. Редко у кого не было желания оторваться от земли и устремиться в небо. К сожалению, в природе люди не умеют летать. Им приходится применять для этого специализированные аппараты. Приблизиться к мечте поможет собранный квадрокоптер своими руками.
Человека он, конечно, не поднимет, но даст понять принципы пилотирования, на которых строится авиация, а также возможность управлять, пусть маленьким, но летательным аппаратом.
Содержание
- Сфера применения
- Самодельный квадрокоптер
- Какие есть варианты?
- Ready to fly (готовый к полету)
- Almost Ready to Fly (почти готовый к полету)
- Полная сборка с нуля
- Самодельный дрон из подручных материалов
- Как собрать квадрокоптер своими руками: инструкция для начинающих
- Подбор материалов и комплектующих
- Детали с Али экспресса
- Сборка
- Настройка и отладка
- Выбор и установка прошивки
- Калибровка
- Возможные проблемы и их решение
Сфера применения
Использовать quadrocopter можно и для серьезных целей. Оснащенный видеокамерой и передатчиком, он может передавать изображения с воздуха отслеживаемых объектов. К примеру, местонахождение голов скота на пастбище или состояние крыш и высоких памятников.
В его силах разведывать ледовые или сплавные заторы рек, передавать информацию о пробках и ситуации на дорогах. квадрокоптер используется и при лесных пожарах, давая обзор направления движения огня. В общем, везде, где есть необходимость получения панорамной картинки с высоты – он первый помощник. Включая сферы спасения жизни и поиска людей.
Из остальных очевидных методов применения дрона – переноска им по воздуху каких-либо грузов. Летательному аппарату не страшны плохие дороги или их полное отсутствие, а удаленное управление позволяет использовать его в любую погоду без риска для жизни пилота.

Есть и не очевидные способы применения квадрокоптеров. К примеру, в некоторых крупных торговых центрах летательные аппараты подобного типа производят замену ламп освещения под потолком. Захват выполняется в специальный держатель, после чего дрон вращается, выкручивая светильник, и транспортирует его на землю. В него устанавливают целую лампу, которая перемещается вместе с аппаратом по воздуху обратно и вкручивается. В результате – нет риска для персонала, а работа выполнена.
Самодельный квадрокоптер
Можно, конечно, купить дрон в сборе, но это не так интересно, как создать его своими руками, пусть уже и из готовых комплектующих, поставляемых наборами от производителя. К тому же, далеко не каждая готовая сборка будет соответствовать нуждам покупателя.
Самый захватывающий вариант получения квадрокоптера – индивидуальный расчет конфигурации и подборка соответствующих ему комплектующих, с монтажом всего этого в одну конструкцию. Приобрести же необходимые элементы можно, к примеру, на торговой площадке E-Bay или AliExpress, сделав заказ через интернет.

Один из нюансов, учитываемый при изготовлении самодельного квадрокоптера, – ограничения, введенные законодательно на сверхлегкие летательные аппараты. К которым относятся и дроны.
В сущности, они касаются только документальной регистрации квадрокоптеров весом свыше 250 грамм. Если аппарат имеет большую массу, но меньшую 30 килограмм, то ему требуются разрешительные бумаги от Федерального агентства воздушного транспорта. Получить их можно и по почте, отправив фотографию беспилотного летательного аппарата и его характеристики в Росавиацию.
Какие есть варианты?
Итак, рассмотрим все возможные варианты приобретения или самостоятельного изготовления маленького летательного аппарата, годного как в качестве игрушки, так и для выполнения вполне серьезных задач.

Ready to fly (готовый к полету)
Под определение попадают все квадрокоптеры, продаваемые в собранном состоянии. После покупки, для их использования достаточно подать питание на узлы аппарата и пульт радиоуправления. Самый простой способ приобщения к пилотированию.
Almost Ready to Fly (почти готовый к полету)
Товарная номенклатура подобных моделей весьма велика. Производитель может представлять как все необходимые детали в наборе, так и только некоторые части дрона. К примеру, раму или контроллер работы двигателей. Сборка и покупка недостающих полностью осуществляется силами владельца такого комплекта.
Приобретение подобного квадрокоптера рекомендуется начинающим пользователям. Он позволит ввести человека в основы создания летательного аппарата, при этом достаточно прост в сборке.

Полная сборка с нуля
Один из самых интересных вариантов, с относительно низкими затратами труда и времени. При выборе компонентов летательного аппарата производят расчеты в зависимости от желаемых характеристик и доступной номенклатуры в продаже.
Имеется в виду, к примеру, что для большого квадрокоптера нужны и габаритные, а также мощные запчасти. Их характеристики непосредственно зависят от планируемого веса дрона. Чем крупнее рама – тем больше масса аппарата, а значит, он должен быть оснащен более высоко оборотистыми двигателями, крупными пропеллерами, а также соответствующей системой питания всей силовой и обычной электроники на борту.
Важной деталью служит и выбор контроллера, который управляет всем этим хозяйством. Он задает скорость вращения винтов, не допуская перекосы аппарата во время полета. К его функциям относится и управление движением дрона, в зависимости от команд оператора на земле.
Не лишним будет контроль характеристик передатчика пульта и устанавливаемого приемника в аппарат. Чем они мощнее, тем на большем расстоянии можно управлять квадрокоптером.
Ну и в конце, навесное оборудование. Без него дрон – не более чем летающая игрушка. А вот смонтировав на его раму камеру с передатчиком, можно найти квадрокоптеру более практичное применение.
Опять же, важна дальность беспроводного функционирования подвеса, его потребляемая мощность (а значит и запас хода батарей всего аппарата). Управляемая камера, с настраиваемым увеличением и яркостью, также даст свой плюс к использованию дрона.
Самодельный дрон из подручных материалов

Сделать квадрокоптер такого типа, с нуля, относительно несложное занятие. Многие его части можно выполнить из подручных материалов. В нем не много элементов конструкции, которые обеспечивают функциональность аппарата:
- Несущая рама. Собственно, «корпус», к которому крепятся двигатели с подъемными винтами, аккумуляторы, системы управления, контроллер и подвесное оборудования. Может быть как покупной, так и изготовленной самостоятельно из дерева, ПВХ труб, пластмассы или алюминия. Единственные к ней требования – легкость и прочность.
Конструкция рамы бывает Н и Х образной для четырех винтов, или многолучевой с большим их количеством.
- Подъемные винты. Приобретаются уже готовые или изготавливаются самостоятельно. Могут обладать любым количеством лопастей и углами их наклона. Каждый вид конфигурации пропеллера дает свои плюсы и имеет определенные минусы. К примеру, большее количество лопастей приведет и к увеличению расхода батареи, но тяговая функция у них лучше.
В процессе полета, вращение винтов происходит в разных направлениях, чтобы избежать эффекта авто раскрутки аппарата.

- Сами двигатели, по количеству лучей квадрокоптера. Мощности каждого из них должно хватать для необходимой скорости раскрутки винта с целью возникновения подъемной силы у дрона. Существуют редукторные, без коллекторные и щеточные варианты. Первые обеспечивают большую скорость раскрутки, но греются в процессе работы. Вторые считаются лучше подходящими для беспилотников. Третий вариант наиболее дешев, но и достаточно часто выходит из строя из-за износа щеток на коллекторе.
- Полетный контроллер. Основное управляющее устройство БПЛА. В своей сущности он – мини компьютер, поддерживающий необходимую частоту оборотов на каждом винте, чтобы не допустить перекосов аппарата. Он же управляет процессом перемещения, замедляя винты одной стороны квадрокоптера и ускоряя другую, чтобы добиться небольшого угла наклона дрона в ту сторону, куда требуется произвести движение. Информацию о текущем положении он получает от специализированных сенсоров – GPS, компаса и акселерометра.
В самодельных конструкциях можно использовать Arduino или любой другой универсальный микроконтроллер с дополнительными модулями необходимых датчиков.

- Электронный регулятор скорости (ESC). Посредник между контроллером и двигателем. Именно он задает необходимое питание для нужной скорости вращения.
- Приемник и передатчик. Первый устанавливается в дрон для получения команд от оператора с земли. Второй — в пульт, оснащенный двумя джойстиками, с помощью которых и управляют квадрокоптером. Полученные сигналы преобразуются в команды для контроллера, который уже обеспечивает последовательность действий по их выполнению.
- Защита винтов. Казалось бы, второстепенная вещь, но без этого кожуха вокруг пропеллера, при любом столкновении он выйдет из строя.
Некоторые варианты несущей рамы подразумевают такое расположение винта, которое убережет его при аварийной ситуации. В таких случаях отдельная защита не нужна.

- Аккумуляторная батарея достаточной емкости, чтобы обслуживать питание всех компонентов летательного аппарата в течение требуемого времени. Для этой части устройства очень важен вес, который непосредственно зависит от ее типа. К примеру, литиевый намного легче, сравнительно с аналогичным той же емкости на основе свинца.
- Навесное оборудование. Самая «вкусная» часть квадрокоптера. Непосредственно от него зависит сфера применения летательного аппарата. Конечно же, как и для всего установленного, тут важен вес.
Кроме того, обязательно нужно уделить внимание потребляемой мощности навесным оборудованием, обеспечив необходимую подачу энергии от отдельного источника или увеличив емкость центрального аккумулятора БПЛА.
В качестве добавочных устройств зачастую используются различный крепеж для транспортировки грузов или видеокамеры с передатчиком изображения.
Как собрать квадрокоптер своими руками: инструкция для начинающих

Чтобы упростить покупку первого квадрокоптера, но дать основы его создания, стоит брать комплекты дронов, в которые уже включены все необходимые детали аппарата. Их прочность, мощность и возможности уже выбраны согласно строению и весу итогового БПЛА.
Подбор материалов и комплектующих
Готовые комплекты, с элементами, подобранными производителем, рассчитаны на определенные характеристики аппарата. Среди них – максимальная дальность полета и нахождения от оператора, потолок высоты и скорости. Обязательно указывается полезный вес нагрузки – грузоподъемность дрона.
Ориентируясь по ним, и производят выбор комплекта.
Детали с Али экспресса
Один из бюджетных вариантов, представленный на Aliexpress для самостоятельной сборки, без ухудшения функциональности квадрокоптера – Flysky i6 F450. Его цена находится в районе 12086 рублей.
В наборе находятся все компоненты, позволяющие создать собственного дрона, кроме аккумулятора и навесного оборудования – камеры, хотя ее крепление предусмотрено конструкцией рамы устройства.

В наборе идут:
|
Наименование |
Характеристики |
|
Рама |
Четырех лучевая. Материал – стекловолокно и полиамидный нейлон. |
|
Двигатель |
4 штуки, 53 грамма каждый |
|
ESC |
Simonk 30A, 4 шт. |
|
Контроллер полета |
APM V2.8.0 |
|
Сенсоры |
GPS датчик 8n |
|
Модуль питания |
5В, 2А |
|
Винт |
8 штук |
|
Звуковой сигнализатор уровня разряда |
|
|
Кабели питания и соединения компонентов |
|
|
Передатчик, приемник и пульт управления |
|
|
Аккумуляторов нет. Необходимо докупать самостоятельно. Пользователи, уже купившие этот дрон, рекомендуют 3300 mAh 25c. |
Для обеспечения съемки квадрокоптером понадобится камера, она приобретается отдельно. В первый, самостоятельно собранный дрон, обычно устанавливают ее версию попроще.
К примеру, хорошо подойдет Wifi камера 5,8G 48CH. Уже в комплекте к ней идет монитор 4,3“, на который и поступает изображение. Цена такого набора – 3705 руб.
Сборка
Конструкция собирается согласно приложенной пошаговой инструкции. Все соединения болтовые, использовать клей не нужно.
Начинают монтаж с рамы, на которую впоследствии закрепляется остальное оборудование. Установка винтов на двигатели производится до момента помещения их в корпус квадрокоптера. Положение элементов конструкции обозначено на прилагаемом к набору чертеже.
В конце устанавливается камера в предназначенное для этого место на раме дрона.
Настройка и отладка

Как и любой прибор, собранный дрон требует настройки. В случае покупки комплекта она минимальна, так как расположение сенсоров, программное обеспечение контроллера и характеристики винтов с двигателями уже подобраны производителем.
Выбор и установка прошивки
Обычно в APM установлена последняя версия программного обеспечения квадрокоптера. Проверить ее можно по инструкции на контроллер полета, подключив его к компьютеру. При несовпадении с последней на сайте изготовителя, выполняется обновление на новую в полетном контроллере.
Для сведения! Актуальная версия прошивки 3.2.1.
Калибровка
Настройку аппарата производят уже после его полной сборки. Необходимо запустить винты, дать ему приподняться над землей и посмотреть направления дрейфа БПЛА при нулевом положении ручек пульта.
Аппарат должен находиться в воздухе неподвижно. Если это не так, то имеет место перекос положения датчика или самого контроллера. Калибровка производится выравниванием сенсора и платы АРМ в нормальное, ровное относительно винтов положение.
Перекосы в креплениях самих двигателей также не желательны. Контроллер компенсирует недостаточный подъемный момент, но это не панацея от проблемы.
Возможные проблемы и их решение

Если купленный комплект квадрокоптера собран с точностью по схеме, при этом все контакты соединены согласно своей полярности, но он не функционирует – значит проблема в каком-то элементе конструкции. Зачастую это управляющий двигателем контроллер, плата приемника или электронный регулятор скорости.
Определить конкретную проблему можно по реакции на команды с пульта. Если никакой нет вообще, а питание на приемник и передатчик подается, нужно проверить соединение компонентов схемы. Возможно, нет контакта платы приемника с микроконтроллером. Если все в порядке, то поможет только замена неисправного комплекта на функционирующий.
Если реакция на команды есть, но работают не все винты, – причиной может быть плохое соединение между модулем ESC и двигателем или APM. В худшем случае – неисправность мотора, проверить который можно временно подключив его на другую линию луча БПЛА. Соответственно решение – замена компонента, вышедшего из строя – мотора или электронного регулятора скорости.

Ниже представлено видео с описанием сборки комплекта квадрокоптера.
Основы коптеростроения. Григорий Колодяжный, Пятигорск.

tarot 680 hexa copter, Пятигорск 2015
Всем привет! После выхода первого же ролика, снятого с собранного мной гексакоптера, народ стал одолевать вопросами и просьбами помочь в постройке аппарата.
В наше время нет дефицита информации, напротив, есть её переизбыток, который очень сложно фильтровать.

FreezEmotions гексакоптер на базе рамы tarot 680
Хочу в своей статье ответить на те вопросы, которые поступают практически каждый день от моих знакомых.
А именно:
— Какой коптер лучше и чем они отличаются? (квадро-, три-, гекса-, октакоптер)
— Купить готовый, или собрать самому?
— Какие комплектующие подобрать? Как рассчитывать? Каков минимальный набор для полёта?
— На что снимать – на GoPro или камеру потяжелее?
Думаю, что для начала этих вопросов хватит, чтобы заставить закипеть мозг тех, в чьих головах пока есть только желание разобраться с основами, но нет опыта за плечами.
Прошу не принимать всё написанное за единственно верную истину. Как раз хочу объяснить, что я человек с творческо-техническим складом ума, но не живу в своем ограниченном мире коптеростроения. Напротив, я новичок в этом вопросе и пишу статью потому, что загоревшись желанием построить дрона для аэросъемки, столкнулся с тем, что очень много разных мнений и выбрать верный путь очень сложно. Мой первый опыт был не совсем удачным, от этого и хочу всех уберечь, выделив самое важное и акцентируя внимание на важные детали, о которых мало говорят.
Итак, чем же отличаются коптеры и откуда такие названия? Квадрокоптер – это четырехвинтовой аппарат. Этот тип БПЛА (беспилотных летательных аппаратов) на сегодняшний день является самым распространенным и уже фактически стал именем нарицательным для народа, если речь идет о мультироторных системах. Самый известный четырехмоторный дрон выпустила компания DJI, практически все о нем слышали. Это тот самый Phantom. Но разбирать все модификации бессмысленно. Единственное, я надеюсь, что после прочтения этой статьи вы сами сможете просчитать параметры и понять, почему полетное время между первым и вторым поколениями Phantom’ов изменилось почти вдвое.
Гексакоптер — это шестимоторный, а октакоптер, соответственно, восьмимоторный аппарат. Есть еще трикоптеры и так называемые соосные. И тут много споров на тему, как правильно назвать аппарат с 8-мью моторами, но 4-мя лучами, соосный квадрокоптер или всё-таки октакоптер. Моторы располагаются на одной оси один над другим. У такого расположения есть одно преимущество — размеры. Но на практике те же 8 моторов на октакоптере будут давать более высокий КПД, чем установка на одной оси парных двигателей.
Виды мультикоптеров, поддерживаемых ПК naza m v2 и направление вращений пропеллеров на них.
Как вы понимаете, вся разница в количестве винтов, сказывается в первую очередь на подъемной силе и стабильности аппарата. То есть логично, что при всех равных условиях маленькому квадрокоптеру будет сопротивляться с ветром намного сложнее, чем большому октакоптеру. Во-первых, больший вес сложнее сдвинуть с места, во-вторых, большая длина рычага (луча рамы, на конце которой установлен мотор с пропеллером) говорит о том, что один и тот же порыв ветра способен накренить аппарат большего размера на меньший угол относительно горизонта. Следовательно, многомоторные системы более устойчивы к худшим погодным условиям.
Хочу коснуться еще одной темы — основ понимания физики поведения мультикоптеров. Эти аппараты управляются легче, чем любые другие летающие модели: самолёты, вертолёты, планеры и т.д. Для полётов коптера необходимо минимум 4 канала аппаратуры управления.
1 канал — Элероны (aileron) — это канал, который отвечает за направление влево-вправо.
2 канал — Элеватор (elevator) — это канал, отвечающий за движение вперед-назад.
3 канал — Газ (throttle) — это канал газа. Отвечает за набор и снижение высоты.
4 канал — Рысканье (rudder) – отвечает за вращение вокруг своей оси.
Остальные каналы в аппаратуре (моделисты любят использовать слово «аппа»- это тот самый пульт-передатчик в руках «пилота» и приемник на борту аппарата) используются для управления осями подвеса камеры, для складывания шасси, надстройки уровня чувствительности аппарата к внешним условиям (PID параметры в полётном контроллере, отвечающие за силу и скорость реакции коптера на сигналы управления, сопротивление погодным условиям), для переключения режимов полёта (к примеру GPS, Attitude, Manual, Failsafe, Home lock, Course Lock). Как говорят опытные авиамоделисты, много каналов не бывает, поэтому у них есть одно важное правило – покупать сразу хорошую надёжную аппу известных брендов. Лучшими считаются производители: Futaba, Spectrum, JR.

Futaba 10J. Одна из первых аппаратур управления с заводским режимом для мультикоптеров!
Время летит, поэтому добавляю в статьи свежие строки, актуальные на сегодняшний день, спустя несколько лет после написания статьи. Буду помечать их курсивом и добавлять ссылки на примеры комплектующих в проверенных магзинах, в которых сам совершал покупки.
Из бюджетных, но проверенных временем аппаратур управления пользуется популярностью FRSky Taranis Q X7. И старший брат — FrSky Taranis X9D Plus
Одна и та же хорошая аппаратура способна хранить в себе настройки одновременно десятков моделей. То есть, однажды приобретая её, можно пользоваться ею фактически всю жизнь и управлять RC самолётами, вертолётами, машинами, мультикоптерами, просто выбирая в меню аппаратуры нужную модель (но закладывать настройки каждой модели нужно самому вручную). Так вот, для чего же на практике люди используют дополнительные каналы? Если вы планируете заниматься аэросъемкой, то минимум 2 канала нужно на управление трех-осевым подвесом – канал YAW отвечает за рысканье (поворот вокруг своей вертикальной оси, горизонтальное панорамирование), PITCH – канал тангажа, то есть наклон камеры вверхвниз. Как правило наклон оси ROLL (горизонта) регулировать не нужно, так как сложно придумать ситуацию, когда на видео нужно нарочно завалить горизонт. Иногда люди используют дополнительную курсовую камеру на сервоприводах, которой вообще можно управлять движениями головы. Лично я реализовал такое управление своим подвесом с камерой GoPro, которая одновременно является и курсовой и основной камерой. Для этого устанавливается датчик head tracker в видео очки или FPV-шлем (First person view – вид от первого лица), который соединяется с аппаратурой управления, а та в свою очередь передает сигналы на каналы управления нужных осей подвеса камеры. Для дополнительных каналов управления также можно придумать другие предназначения: от сброса транспортируемых коптером предметов до поджигания фитиля установленных на него ракетниц-фейерверков, тут всё ограничивается лишь полётом фантазии.
_
Еще важно разобраться с тем, как мультикоптер работает в целом. Понятно, что при движении стика газа вверх на аппаратуре управления, коптер просто прибавляет обороты на всех двигателях и происходит набор высоты. Чтобы полететь вбок, аппарат кренится в нужную сторону, увеличивая обороты двигателей с одной стороны и снижая с другой. При этом, за счет датчиков, соединенных с ПК (полётным контроллером), аппарат кренится только до ограниченного в прошивке контроллера угла, чтобы не перевернуться. Вперед и назад летает, соответственно, тем же принципом. А вот вращение вокруг своей оси происходит за счет того, что двигатели через один крутятся в противоположные стороны и пропеллеры должны быть соответствующие — одни загребают воздух под себя, вращаясь по часовой стрелке, другие — против. Получается, чтобы аппарат развернулся в нужную нам сторону, он увеличивает обороты двигателей вращающихся в одну сторону и ровно настолько же уменьшает обороты двигателей, вращающихся в противоположную.
_
Что касается «начинки», то мультикоптер состоит из рамы, на которую устанавливаются двигатели. Сигналы на вращение двигателей идут из полётного контроллера (ПК), но мощности этих сигналов не достаточно, поэтому перед каждым двигателем стоит регулятор оборотов (в простонародье «регуль», ESC).
Регулятор оборотов ESC.
Также на борту стоит приемник сигналов управления, который передает их в ПК.

Futaba R3008SB приемник сигнала управления
Современные полётные контроллеры такие, как распространенный DJI Naza-m v2 представляют собой целые наборы.

Полётный контроллер DJI Naza M v2
Контроллер уже включает в себя виброразвязку, поэтому его не нужно ставить на демпферную площадку, а нужно крепить прямо на корпус. Также у него на борту находится гироскопический, барометрический датчики, магнитометр, компас и дополнительно подключается модуль GPS, чтобы аппарат мог вернуться на точку взлета сам, если потеряет связь с аппаратурой управления, но это не единственная функция. К данному полётному контроллеру в комплекте идет модуль PMU и LED, а также может подключаться модуль bluetooth и OSD телеметрия. Также на борту стоит батарея, питающая всю систему и может стоять дополнительная батарея для приемника аппаратуры управления. Данный полётный контроллер установлен в современных квадрокоптерах DJI Phantom 2, но его возможности намного шире рамок этого небольшого аппарата.
Выше перечислен минимальный набор, который можно назвать мультикоптером. Он может взлететь, если имеется «аппа», но этого не достаточно для съемок. Пишу это к тому, что многие, узнав бюджет на весь мой аппарат с камерой и дополнительным оборудованием, удивляются и спрашивают, почему я не купил за эту сумму готовый более серьезный аппарат. Ответ в том, что дополнительное оборудование для управления, съемки, стабилизации и контроля стоит намного больше, чем сам мультикоптер.
И всё-таки, собрать самому, или купить готовый? На этот вопрос вы ответите сами себе, прочитав всю статью и осознав все за и против. Многие, как я уже написал, критикуют меня в том, что я потратил большую сумму на сборку аппарата, который фактически умеет то же самое, что DJI Phantom 2. Сумма со всеми допами подбирается к 200 тысячам рублей. Но сюда входит и стоимость аппаратуры управления Futaba 10J с заводским режимом мультикоптеров, в паре с родным передатчиком работающей до 4 км и имеющей очень надежную помехоустойчивость. Сюда же вошла и камера GoPro 4 black, подвес Fy-G3, очень мощный FPV-передатчик и приемник на 1000 мВатт 1,2 Ггц с изготовленными под заказ клеверными антеннами, покрывающими расстояние до 12 км и фильтром, чтобы срезать частоты, наиболее влияющие на аппаратуру управления, чтобы не забить ненароком сигнал приемника. Также в этой сумме FPV-видеошлем eYebox с потрясающей цветопередачей, детализацией и углом обзора (а до него были очки Fatshark BASE SD, которые мне не понравились в сравнении со шлемом и я решил их продать).
Говоря о вопросе покупки готового собранного аппарата – можно однозначно ответить – покупайте проверенные, если Вы планируете использовать их только для того, для чего они созданы. То есть если Phantom 2 создан, чтобы поднимать GoPro, вы не повесите на него зеркалку, вы не увеличите время его полёта, из него выжат максимум очень грамотными специалистами.
Собирать коптер самостоятельно – это выбор тех, кому нравится решать сложные задачи. То есть для людей, которые получают удовольствие от самого процесса расчетов и сборки. Преимущества собранного своими руками аппарата в том, что он подлежит апгрейду, на него можно вешать любое дополнительное оборудование. Но важно понимать, что аппарат изначально рассчитывается под определенный полётный вес, время полёта. А вот, так сказать, запас тяги может привести к плачевным последствиям.
Конфигурация моего нынешнего гексакоптера такова:
1. Рама: Tarot fy-680.
2. Контроллер: dji naza-m v2 c gps.
3. Моторы: sunnysky v3508 kv580
4. Регуляторы: Hobbywing Platinum PRO 30A OPTO ESC(2-6s).
5. Пропеллеры: карбон 1255.
6. Батареи: lipo 4S turnigy 5000 mah 30-45C и 8000 mah 20-30 C (вес 500 и 800 грамм).
7. Аппаратура управления и приемник: Futaba 10J.
8. Подвес для gopro3 : Feiyu Tech fy G3 gimbal.
9. OSD телеметрия DJI iOSD mini.
10. BAC трансформатор с выводом на 5V для подпитывания камеры во время полёта.
Снаряженный вес без батареи 2600 грамм.
Изначально была немного иная конфигурация. Аппарат летал на батареях 3S, двигателях sunnysky 2216 kv800 и пропеллерах 1045 и 1238 (но на 1238, которые прислал продавец по ошибке, аппарат разбился).
Если вы всё-таки решились собирать мультикоптер самостоятельно, попробую объяснить основные принципы. Важно сразу понять, какой снаряженный вес будет в итоге у аппарата и вести расчеты, отталкиваясь от него. Можно найти готовые конфигурации на форумах и перепроверить их на специальном калькуляторе, о котором я расскажу далее. Важен также такой момент, что этот калькулятор не знает, возможно ли физически установить пропеллеры расчетного размера на вашу раму и можно ли их вообще ставить на заданные двигатели.
1. Поэтому первым делом определяемся с рамой, узнаем её вес, максимальный размер пропеллеров, которые возможно установить.
2. Подбирая моторы, сразу смотрим на сайте производителя таблицы характеристик с рекомендуемыми пропеллерами. К примеру я использую моторы SunnySky v3508 kv580
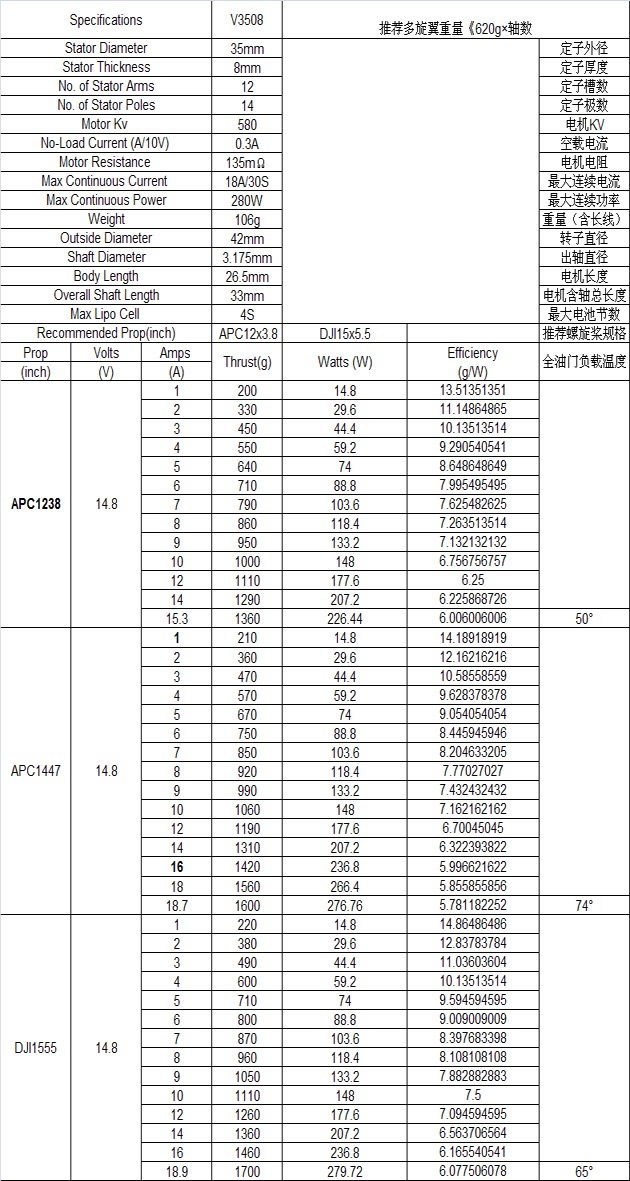
характеристики моторов SunnySky v3508 kv580
И тут хочу акцентировать внимание на параметры мотора. В названии мотора зашифрованы его основные параметры V3508 kv580, где v — это серия, 35мм — диаметр статора, 8 мм — это длина статора. А параметр KV говорит об оптимальных для данного мотора оборотах висения летательного аппарата. То есть, имея оптимальные обороты висения и вес аппарата, нам придется под них подбирать пропеллеры с нужными параметрами, чтобы добиться оптимальных показателей. В таблице видно, что для данных моторов производителем рекомендуются 3 вида пропеллеров: 1238, 1447 и 1555. Во втором столбце видим, что везде значение напряжения стоит 14.8 вольт. То есть данные моторы используются только с 4S батареями. Для одних и тех же моторов в таблице могут даваться показания для разного вольтажа, и нужно быть очень внимательным, ведь моторы, которые работают и с 11.1 вольтовыми 3S батареями и с 14.8 вольтовыми 4S батареями, как правило, допускают максимальный размер пропеллеров при 3S батареях меньше, чем при 4S, так как мотору может просто не хватить мощности раскручивать тяжелые для него пропеллеры, и есть вероятность перевернуть коптер вверх ногами прямо в полёте. (Со мной такое случалось). Вот пример таблицы для моторов SunnySky 2216 kv800
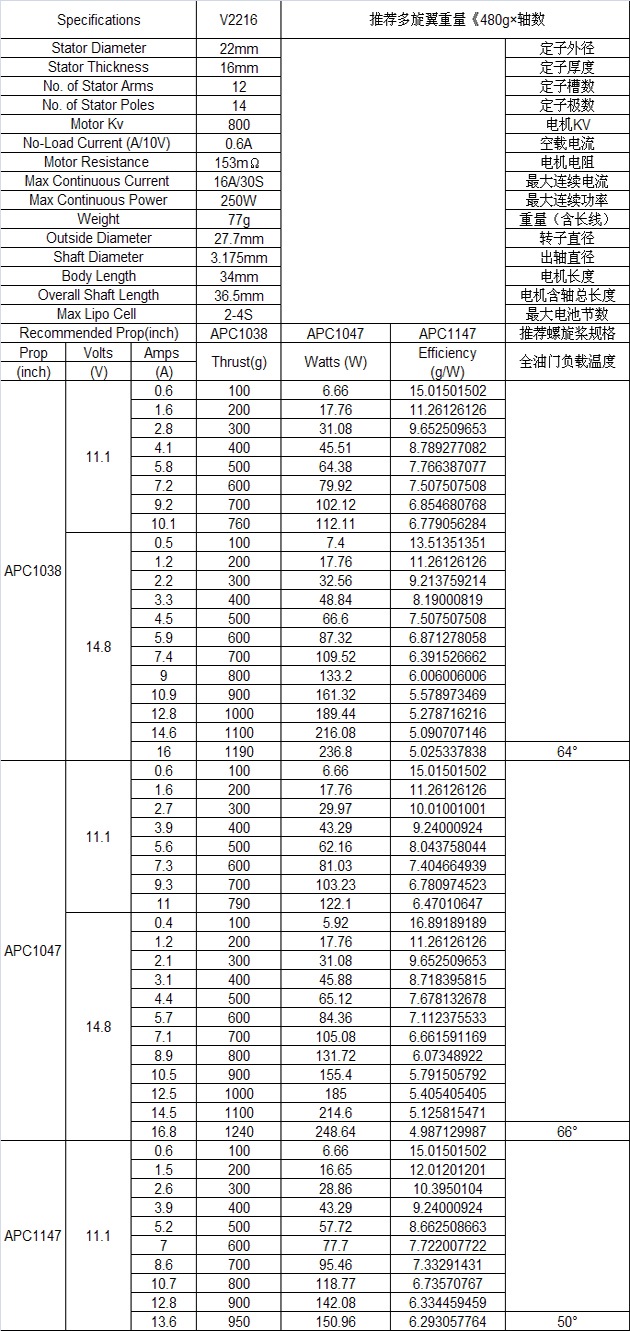
характеристики моторов SunnySky v2216 kv800
Из этой таблицы видно, что с моторами 2216 при использовании 11.1 вольтовых батарей можно ставить пропеллеры максимального размера 1147, а при 14.8 вольтовых максимум 1047-е пропеллеры. Теперь, чтобы сложить картину воедино, следует пояснить маркировку пропеллеров. На самом деле, размер обозначает только первое двузначное число, а второе означает шаг. Размеры даются в дюймах. Маркировка 1047 означает, что пропеллеры 10-тидюймовые, а шаг на один оборот составляет 4,7 дюйма.
Выше я уже привел ссылку на видео случая из моей первой конфигурации, когда я на моторы 2216 kv800 установил пропеллеры 1238. На видео с 17й секунды видно, что при снижении, либо порыве ветра аппарат начинает амплитудно раскачиваться. Закончилось это тем, что коптер перевернулся в воздухе и приземлился вверх ногами на асфальт. Во-первых, моторы перегреваются и могут вообще перегореть в полёте, во-вторых, у них банально не хватает силы резко раскручивать нужные пропеллеры для стабилизации положения коптера, в итоге аппарат себя раскачивает все сильнее и сильнее.
Также, прежде чем перейти к этапу расчетов, важно пополнить свои знания информацией о литий-полимерных батареях. Они встречаются сейчас повсеместно — в телефонах, планшетных компьютерах, ноутбуках и других устройствах. Эти батареи имеют максимальную ёмкость относительно веса и максимальную токоотдачу, минимальное время заряда. Но при этом батареи токсичны и даже взрывоопасны.
Они непременно взрываются при сильном механическом повреждении, при чрезмерном перезаряде, при замыкании. Эту информацию важно знать и тем, кто не планирует собирать себе коптер.
Li-Po батареи нужно заряжать, транспортировать и хранить в специальных огнеупорных конвертах.

Огнеупорный конверт
Теперь давайте разберем параметры в описании батареи.

Lipo батарея
К примеру :
ONBO 5200mAh 4S 45C Lipo Pack:
• Емкость: 5200mAh
• Напряжение: 4S1P / 4 Cell / 14.8V
• Ток разряда: 45C продолжительный / 90C пиковый
• Вес: 485г (включая провода, разъемы и корпус)
• Размеры: 160x50x32мм
• Балансировочный разъем: JST-XH
• Силовой разъем: T-connector
Что же означают эти 2S, 3S, 4S? 6S и на что они влияют?
Параметр S означает количество ячеек, либо банок. Каждая ячейка представляет собой отдельную батарею указанной ёмкости, но её номинальное напряжение 3.7 вольта, а напряжение полностью заряженной ячейки составляет 4.2 вольта. Поэтому номинальное и полное напряжение 2S аккумулятора составляет 7,4-8,4 вольта, 3S – 11,1-12,6 вольт, 4S – 14,8-16,8 вольт и т. д.
У аккумулятора имеется балансировочный разъем, к которому можно подключить индикатор напряженияи следить как за общим уровнем заряда батареи, так и за уровнем заряда в каждой ячейке.

индикатор заряда 1S-8S li-po батарей
Подобный индикатор настраивается на определенный уровень напряжения, по достижении которого на любой из ячеек он начинает сигнализировать громким писком. Это очень удобно, если отправлять аппарат в полёт с подключенным устройством, которое настроено на 3,4 вольта. Чтобы знать, что пора приземлять коптер. Ведь важно знать, что порог, до которого можно разряжать Li-Po аккумулятор, чтобы он прослужил долгое время, составляет 3.3 вольта на банку. При полной разрядке аккумулятора, он теряет значительную часть своей ёмкости.
А для правильной его зарядки требуется специальное зарядное устройство, которое умеет балансировать ячейки до равного напряжения и при этом не перезаряжать, чтобы не допустить возгорания.

Зарядное устройство imax-b6
Подобная зарядка также способна заряжать (либо разряжать) до номинального напряжения для хранения батарей, ведь хранение полностью заряженных батарей тоже негативно сказывается на их ресурсе.
Возвращаясь к описанию параметров батарей, хочу разобрать параметр “C” – обычно встречаются цифры 10C, 20C, 30C и т. д. Данный параметр равен ёмкости элемента. Грубо говоря, 1С — 5000 mah составляет 5A за 1 час, а если батарея с током разряда 20C, то она способна полностью отдать свой заряд в 20 раз быстрее часа, то есть за 3 минуты. Но в то же время рекомендуемый ток заряда для большинства батарей не должен превышать 1С. Но значение максимального тока заряда указывается в описании к каждой батарее. Тем не менее, более качественный и щадящий заряд идет именно током 1С – то есть, если емкость батареи 2000 mah, то заряжать её желательно током не более 2 ампер. А если емкость батареи 4000 mah, то тот же 1С для такой батареи уже составит 4 ампера.
Если вы осилили всю эту теорию, переходим к самому интересному. Давайте научимся пользоваться калькулятором для расчета мультикоптеров.
Скажу сразу, он «буржуйский», поэтому просит внести лепту. Но мы- россияне, поэтому есть легальный способ пользоваться всеми функциями сего ресурса без финансовых вложений. Заключается он в перезагрузке сайта, если не находите в списке нужных двигателей или аккумуляторов в базе. При каждом заходе база обновляется. Но могу добавить, что многие двигатели являются аналогами, поэтому можно подобрать двигатель другого производителя с такими –же размерами и параметром KV.
Вот пример моей конфигурации в полном снаряжении:
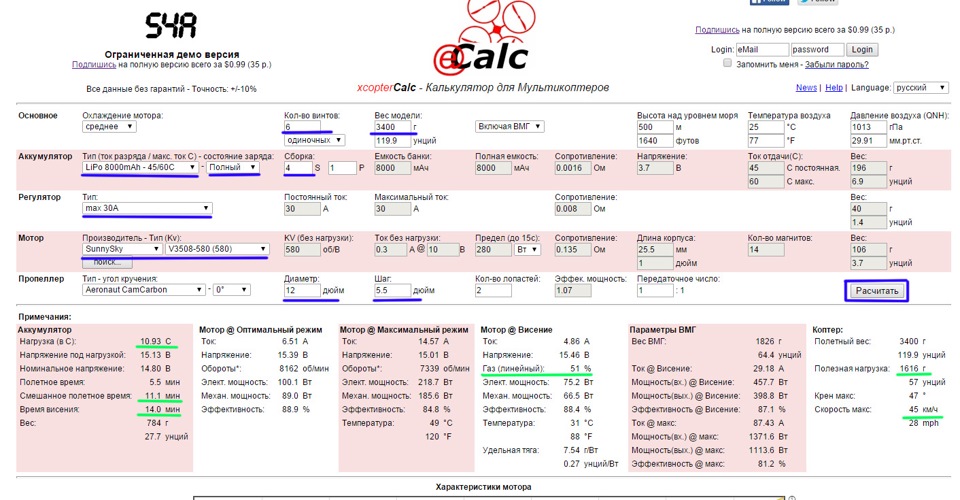
Синим я пометил параметры, которые менял в таблице с параметров по умолчанию после загрузки страницы, а зеленым – наиболее важные строки, на которые стоит обращать особое внимание при расчетах. Как видно, газ висения подобран практически идеально. Для полётного контроллера naza желательно подбирать значения в пределах от 40% до 60%. Газ висения не означает, что если вы оставите стик газа на управлении ровно посередине, мультикоптер начнет подниматься при переизбытке тяги, или опускаться при её недостатке. Нет, на самом деле полётный контроллер сам регулирует обороты двигателя, для того, чтобы оставаться на заданной высоте при положении стика газа ровно посередине. Но если газ висения будет более 60%, значит аппарат перегружен, нужно пробовать пропеллеры с большим шагом, либо большего размера (если это позволяет рама и характеристики двигателей).
Для примера я посчитал эту же конфигурацию, если установить пропеллеры 1447.
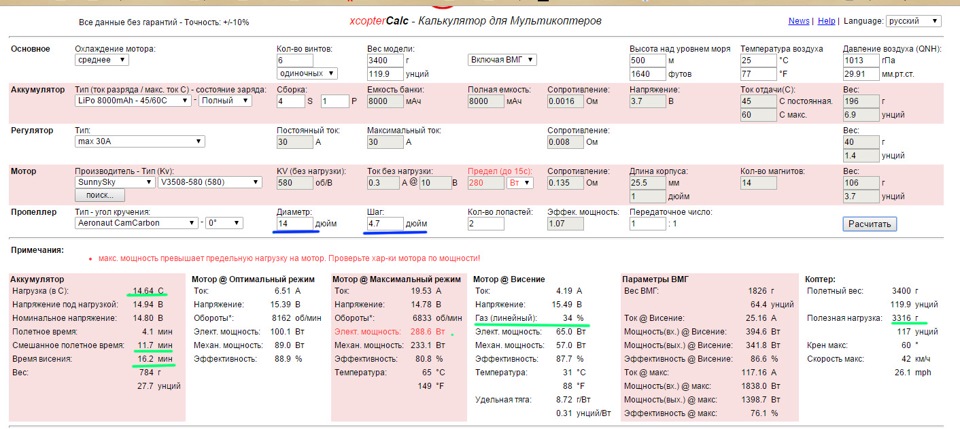
Видим, что совсем незначительное увеличение времени полёта ощутимо сказалось на нагрузке аккумулятора, которая возросла с 11 до 15С и нагрузке на мотор. В максимальном режиме даже выводится предупреждение о превышении допустимой нагрузки. Но при этом полезная нагрузка возросла почти вдвое, а газ висения снизился до 34%, то есть образовался небольшой избыток тяги. Такая конфигурация подошла бы, если бы я захотел повесить на свой коптер не GoPro, а камеру типа Panasonic GH4K или sony nex. Но тогда время полёта ощутимо сократится, ведь возрастет вес. Для полётов с такими камерами я приведу расчет в самом конце, а пока привожу пример, если на такой-же конфигурации использовать батарею большой ёмкости – 16000 mah. Её вес 1 кг (10С), она относительно недорогая – на сегодняшний день можно купить ее за 7300 руб с доставкой по РФ. Но и пропеллеры в расчетах уже ставлю не 1255, а 1355, так как возрастет вес аппарата.
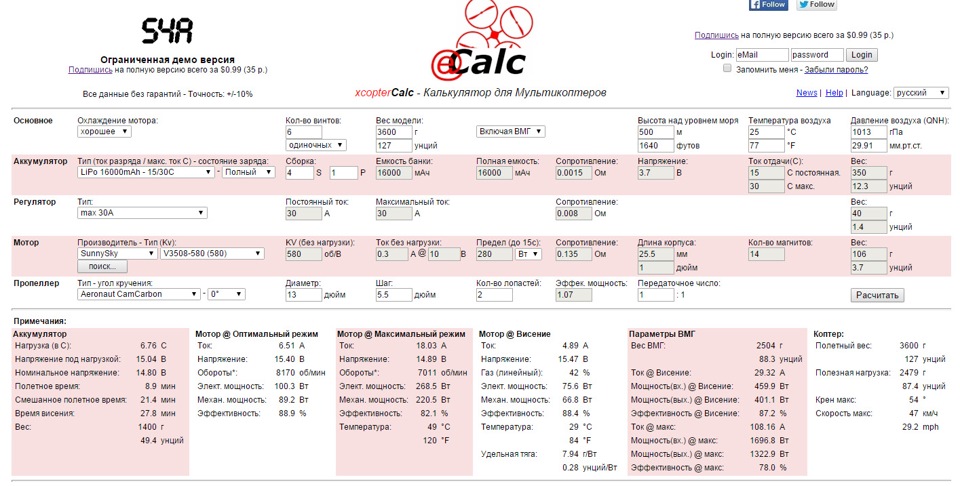
Расчетное время полёта в полном снаряжении уже составляет порядка 22 минут, а время висения подбирается к 30 минутам. На самом деле эти расчеты дают лишь приблизительное время полёта. В теории, в самой первой конфигурации расчетное время полёта 11 минут, а на практике оно составляет 16, а время висения 19 минут до звукового сигнала о достижении на одной из ячеек аккумулятора напряжения в 3,4 вольта под нагрузкой. И обратите внимание, нагрузка на аккумулятор составляет всего 6.76С. То есть, чем больше емкость аккумулятора, тем меньше нужно обращать внимание на эту цифру. Я бы даже сказал тем лучше, если эта цифра будет не в пределах 30-40, так как данный параметр скажется лишь на весе аккумулятора. Если расчетная нагрузка имеет запас почти в полтора раза, а пиковая нагрузка на аккумулятор и так обычно превышает почти вдвое заявленный параметр долгосрочной нагрузки (10-20С) (30-45С), нет смысла покупать более дорогой и тяжелый аккумулятор.
Если же нужно собрать настоящий грузоподъемный «долголёт», то тут нужны низко-оборотистые мощные двигатели такие как SunnySky kv380 и 6S батарея.
Что касается известного всем DJI Phantom 2, то его полётный вес составляет 1400 грамм, моторы dji 2312 kv960 (у первого «фантома» 2212 kv920), пропеллеры 9450 (у первого 9443), батарея 3S 5200 mah (у первого 2200 mah), регуляторы примерно на 20 ампер. Думаю, что вам будет интересно посчитать самим и понять, что будет с полётным временем и другими параметрами, если довесить на готовый аппарат 200 граммовый комплект FPV: видеопередатчик, с антенной и бортовой 2S-3S батареей. Скажу сразу, в среднем время полёта сократится на 5-7 минут. А вот 200 грамм для гексакоптера уже не так значительны. К тому же, многие задаются вопросом, есть ли в этом смысл, или даже устраивают дорогостоящие бессмысленные эксперименты без расчетов, по установке двух не оригинальных батарей большей ёмкости под лучи «фантома» вместо одной оригинальной. Смысла в этом совершенно нет, так как запас грузоподъемности у таких аппаратов очень мал. Теперь, понимая, как пользоваться калькулятором, советую вам посчитать самостоятельно.

FreezEmotions.ru
Надеюсь, что моя статья будет для вас полезной. К вопросу о покупке деталей и запчастей для сборки, я пользуюсь известными всем иностранными торговыми площадками ebay и aliexpress, hbbyking и подобными.
