?>
X
Сайт может собирать метаданные пользователя (cookie, данные об IP-адресе и местоположении).
Если, прочитав это сообщение, вы остаетесь на нашем сайте, это означает, что вы не возражаете против использования этих технологий.
LEGO, логотип LEGO, Minifigure (Минифигурка), DUPLO и MINDSTORMS являются торговыми марками и/или охраняемой авторским правом собственностью LEGO Group.
©2023 The LEGO Group. Все права защищены. Использование этого вебсайта подтверждает ваше согласие с этим.

Color Sorter — стандартная модель робота для базового набора LEGO Mindstorms EV3 Education. Сортировка — типичная задача образовательной робототехники. Робот представляет собой автоматизированную конвейерную линию, детали конструктора LEGO сортируются по цвету. Для определения цвета используется соответствующий датчик, входящий в состав конструктора. Набор 45544.
Комплектация
- большие моторы — 1 шт.
- средний мотор — 1 шт.
- МПК — 1 шт.
- датчик цвета — 1 шт.
- датчик касания — 1 шт.
Скачать инструкцию по сборке данного робота можно ниже
Скачать инструкцию по программированию данного робота можно ниже





 Colour Sorter или сортировщик цветов, модель собираемая из набора EV3 education 45544. Базовая модель не очень интересна, по этому я сделал свою.
Colour Sorter или сортировщик цветов, модель собираемая из набора EV3 education 45544. Базовая модель не очень интересна, по этому я сделал свою.
Инструкция для базовой модели
Моя модель может сортировать цвета без какого либо вмешательства (главная проблема это подача деталей).
Далее я покажу свою программу.

Два блока «малый мотор» перед циклом-это начальная калибровка.
Блоки в цикле отвечают за возврат «дозатора» на исходную позицию.

В блоке «переключатель» (рис.2)определяется цвет, после чего данные обрабатываются и робот начинает сортировку.
Изначальная программа здесь. Как видно по скриншотам, особых изменений я не вносил.
Привет! На сайте я выкладываю программы, видео и т.д
Слайд 1
Муниципальное общеобразовательное учреждение Курмышская средняя школа конкурс технического творчества «Время, вперед!» номинация «Робототехника» Робот-сортировщик цветных элементов Выполнил: ученик 9 класса Дмитриев Алексей Олегович Руководитель: Пресняков Алексей Евгеньевич 607467, Нижегородская область, Пильнинский район, село Курмыш , улица Мартьянова, дом 55 телефон 8 (831) 92-43-229 2017 г.
Слайд 2
Пояснительная записка Робот — автоматическое устройство с антропоморфным действием, которое частично или полностью заменяет человека при выполнении работ. Конструирование модели робототехнического устройства, способного выполнять определенные функции, свойственные человеку. При программировании роботов ЛЕГО используют программу LEGO MINDSTORMS EV3, в нашем случае мы программируем робота на языке EV3, используя датчики и сервомоторы, что является новизной в нашем программировании и конструировании. LEGO Mindstorms EV3 на сегодняшний день один из самых продвинутых и многофункциональных наборов конструкторов серии «ЛЕГО Эдьюкейшн «. В результате работы мы сконструировали робота – сортировщика цветовых элементов, исследовали выполнение им определенных функций, в зависимости от работы его основных элементов и выяснили, что модель может заменить человека при выполнении работы.
Слайд 3
Цели и задачи: Цель : Создание робота для сортировки цветных элементов в промышленном масштабе. А так же формирование культуры конструкторско-исследовательской деятельности и освоение приемов конструирования, программирования и управления робототехническими устройствами (базовый набор конструктора LEGO MINDSTORMS EV 3 (45544)). Задачи : — познакомиться с конструктором LEGO MINDSTORMS EV 3 (45544); — изучить основы программирования в среде LEGO MINDSTORMS Education EV3; — сконструировать модель робота; — создать программу для управления роботом; — испытать полученного робота. Предмет исследования : конструктор со средой программирования LEGO MINDSTORMS EV 3.
Слайд 4
Работа над роботом ограничена наличием начального набора LEGO MINDSTORMS EV 3(45544): крепежных деталей, датчиков и возможностью микроконтроллера конструктора. Данный робот умеет определять цвета и сортировать детали по цвету. Сначала предмет сканируется специальным инфракрасным датчиком. После того, как происходит сканирование, передаётся звуковой сигнал — называется цвет предмета, в зависимости от которого машина определяет направление предмета. Далее, предметы сортируются по цветам. Протестировав работу модели на созданной программе с помощью языка EV 3, и выяснил, что робототехническое устройство работает согласно заложенным командам, то есть при определенных условиях, робот может анализировать (различать) цветовые элементы, переносить их и сортировать, то есть выполнять работу человека.
Слайд 5
Описание сборки Робота-сортировщика цветных элементов Сначала я создал робота теоретически, т.е. я определил, какие операции он будет выполнять. И приступил к пошаговой сборке робота: Шаг 1 : Подготавливаем детали разных цветов, которые будут выполнять роль сортировочных цветовых элементов. Имеется четыре вида цветов, каждой детали по две штуки.
Слайд 6
Шаг 2: Делаем основу для главного блока EV3, а так же присоединяем к нему датчик определение цвета. Выводим из него провод. Шаг 3 : Начинаем собирать первую часть сортировочного механизма. Собираем первую половину основы и присоединяем к ней два колеса. Скрепляем их второй половиной.
Слайд 7
Далее к тому, что получилось, присоединяем двигатель и выводим из него провод. С помощью шестерёнок делаем привод на крайнее колесо. Так же присоединяем датчик касания, и из него тоже выводим провод. Аналогично собираем вторую часть с двумя колёсами, только без двигателя и датчика . Скрепляем их вместе.
Слайд 8
Всё это соединяем с уже раннее сделанным главным блоком. Должно получиться так:
Слайд 9
Шаг 4 : Делаем распределяющий по цветам механизм. Начинаем с двигателя, который будет выталкивать разноцветные детали. Делаем основание для него, так как показано на фотографии: Далее конструкцию которая получилась, соединяем с гусеницей. Она состоит 43 скреплённых между собой пластинок + 7, которые мы поставили в саму конструкцию с выталкивающим двигателем .
Слайд 10
Вот что получилось:
Слайд 11
Шаг 5 : Заключение. Выталкивающий механизм соединяем с частью которую мы делали в третьем шаге. Располагаем гусеницу на четыре колеса. Подключаем датчики и двигатели по проводам к блоку EV 3 . В конечном результате получается так:
Слайд 12
ПРОГРАММИРОВАНИЕ: Датчик цвета, очень важный и полезный датчик! В большинстве конструкций он является, тем, чем у человека являются глаза. Поэтому изучению датчика цвета мы посвятим два последовательных урока, но в дальнейшем курсе еще вернемся к его изучению и использованию. Необходимо написать программу, называющую цвета предметов, подносимых к датчику цвета. Для отладки программы нам понадобится несколько цветных предметов: это могут быть кирпичики конструктора Lego . Для лучшего результата следует взять цвета, максимально приближенные к основным, но датчик довольно неплохо справляется с распознаванием подходящих оттенков.
Слайд 13
Рис. 1 Программный блок «Переключатель » Создадим программу, установим в программе блок «Переключатель», выберем режим «Датчик цвета» — «Измерение» — «Цвет» (рис.1). В отличие от программного блока «Ожидание», программный блок «Переключатель» не ждет, пока наступит определенное событие, а проверяет текущее состояние и выполняет программные блоки, находящиеся в контейнере, сопоставленном текущему состоянию.
Слайд 14
Продолжим формирование программного блока «Переключатель» (рис. 3): — создадим необходимое количество контейнеров, соответствующее количеству цветов для распознавания + вариант «Без цвета», — в настройках контейнеров установим распознаваемые цвета, — в каждый контейнер поместим программный блок «Звук» голосовое сообщение определенного цвета. — каждому цвету сопоставим соответствующий звуковой файл. Рис. 3 Формирование программного блока «Переключатель»
Слайд 15
Наш программный блок «Переключатель» значительно увеличился в размерах. Специальная кнопка (Рис. 4 поз. 1) позволяет переключить режим отображения блока на экране на «Вид с вкладками». Изменим размеры блока для комфортного визуального отображения. Рис. 4 Блок «Переключатель» Вид с вкладками Осталось вставить наш настроенный программный блок «Переключатель» внутрь программного блока «Цикл». Программа готова! Загрузим её в робота и протестируем работу! (Рис. 5)
Слайд 16
Добавим в нашу программу движение. Сделаем следующее поле для выполнения задания: необходимо написать программу прямолинейного движения робота, называющего цвета, которые он выкидывает. При достижении определенного расстояния в зависимости от цвета робот останавливается, проговаривает цвет и выбрасывает элемент.
Слайд 17
Заключение В ходе работы над данным роботом у меня сформировались умения и навыки: — самостоятельно решать технические задачи в процессе конструирования роботов (планирование предстоящих действий, самоконтроль, применять полученные знания, приемы и опыт конструирования с использованием специальных элементов и т.д.); — создавать действующие модели роботов на основе конструктора LEGO; — создавать программы на компьютере на основе компьютерной программы MINDSTORMS EV 3; — передавать (загружать) программы в EV 3; — корректировать программы при необходимости; — демонстрировать технические возможности роботов; — излагать логически правильно действие своей модели (проекта).
Слайд 18
В результате реализации проекта «Робот-сортировщик цветовых элементов» у меня получилась модель робота, которую ещё нельзя использовать на соревнованиях по робототехнике. Она не оставляет банки в заданном месте. Я получили первые навыки программирования в среде LEGO MINDSTORMS EV 3. Перспективы развития Робототехники в школе: — создание новых моделей роботов, — участие в различных состязаниях робот, — довести программу до конца. Я считаю, что за мобильными роботами или вообще за мобильными устройствами — будущее человечества. Но, помимо этого, занятие робототехникой очень интересно.

Выполнил: ученик 2-б кл. Медведев Артур
Руководитель: Гроза В.К.
Цель:
создание робота для сортировки цветных элементов и освоение приемов конструирования, программирования и управления данного робота.
(базовый набор конструктора LEGO MINDSTORMS EV 3 (45544)).
Задачи :
- продолжить знакомство с конструктором LEGO MINDSTORMS EV 3 (45544);
- изучить основы программирования в среде LEGO MINDSTORMS Education EV3;
- сконструировать модель робота;
- использовать программу для управления роботом;
- испытать полученного робота.
Предмет исследования : конструктор со средой программирования LEGO MINDSTORMS EV 3.

Описание сборки Робота-сортировщика цветных элементов
Сначала я создал робота теоретически, т.е. я определил, какие операции он будет выполнять. И приступил к пошаговой сборке робота
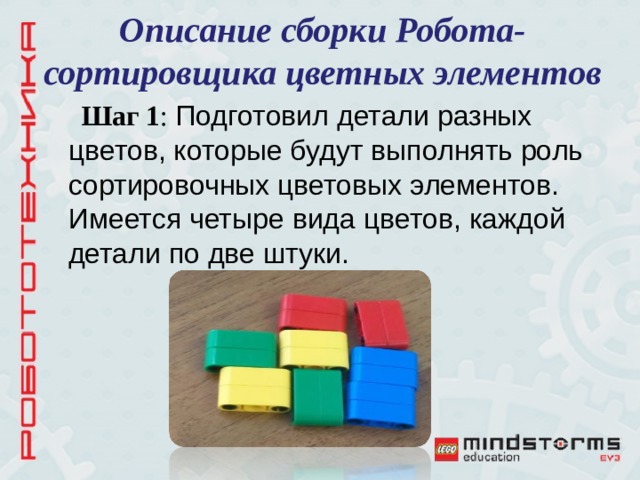
Описание сборки Робота-сортировщика цветных элементов
Шаг 1 : Подготовил детали разных цветов, которые будут выполнять роль сортировочных цветовых элементов. Имеется четыре вида цветов, каждой детали по две штуки.
Описание сборки Робота-сортировщика цветных элементов
Шаг 2: С делал основу для главного блока EV3, а так же присоединил к нему датчик определения цвета. Вывел из него провод. Датчик цвета, очень важный и полезный датчик! В большинстве конструкций он является, тем, чем у человека являются глаза.

Описание сборки Робота-сортировщика цветных элементов
- Шаг 3 : Собрал первую часть и присоединил к ней два колеса. Скрепил их второй половиной.

Описание сборки Робота-сортировщика цветных элементов
Шаг 4 : Сделал распределяющий по цветам механизм. Начал с двигателя, который будет выталкивать разноцветные детали. Сделал основание для него, так как показано на фотографии

Описание сборки Робота-сортировщика цветных элементов
Далее конструкцию которая получилась, соединил с гусеницей. Она состоит 43 скреплённых между собой пластинок + 7, которые поставил в саму конструкцию с выталкивающим двигателем.
Описание сборки Робота-сортировщика цветных элементов
Шаг 5 : Заключение. Выталкивающий механизм соединил с частью которую мы сделали в третьем шаге. Расположил гусеницу на четыре колеса. Подключил датчики и двигатели по проводам к блоку EV 3. В конечном результате получил модель Робота-сортировщика.
ПРОГРАММИРОВАНИЕ
- Перенес программу из компьютера в главный блок и проследил за последовательностью цветов, подносимых к датчику цвета;
- создал необходимое количество контейнеров, соответствующее количеству цветов для распознавания.
Заключение
В ходе работы над данным роботом научился:
- создавать действующие модели роботов на основе конструктора LEGO;
- передавать (загружать) программы в EV 3;
- демонстрировать технические возможности роботов;
- излагать логически правильно действие своей модели .